
Journal of Systems Engineering and Electronics ›› 2023, Vol. 34 ›› Issue (3): 754-765.doi: 10.23919/JSEE.2023.000060
• CONTROL THEORY AND APPLICATION • Previous Articles
Fuyunxiang YANG( ), Leping YANG(), Yanwei ZHU()
), Leping YANG(), Yanwei ZHU()
Received:2022-03-31
Online:2023-06-15
Published:2023-06-30
Contact:
Yanwei ZHU
E-mail:yangfuyunxiang@nudt.edu.cn;ylp_1964@163.com;zywnudt@163.com
About author:Supported by:Fuyunxiang YANG, Leping YANG, Yanwei ZHU. An AutoML based trajectory optimization method for long-distance spacecraft pursuit-evasion game[J]. Journal of Systems Engineering and Electronics, 2023, 34(3): 754-765.
Add to citation manager EndNote|Reference Manager|ProCite|BibTeX|RefWorks

Fig 1
Schema of conventional DNN method"


Fig 2
Schema of AutoML based method"
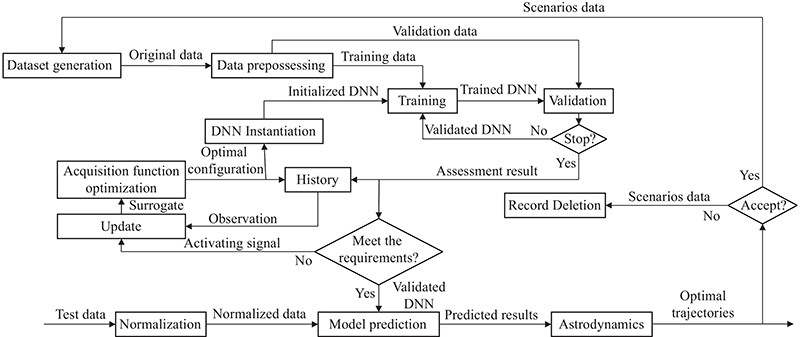
Table 1
Scenario domain"
| Element | min | max |
| Semi-major axis | 6.47 | 6.78 |
| Eccentricity | 0 | 0.3 |
| Inclination/rad | 0 | π/36 |
| Right ascension of the ascending node/rad | 0 | 2π |
| Argument of perigee/rad | 0 | 2π |
| Ture anomaly/rad | 0 | 2π |
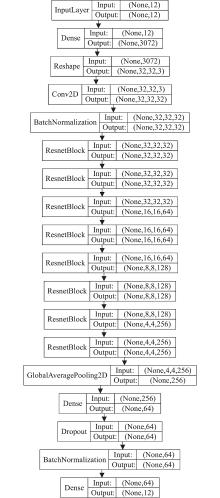
Fig 3
Resnet18 net"
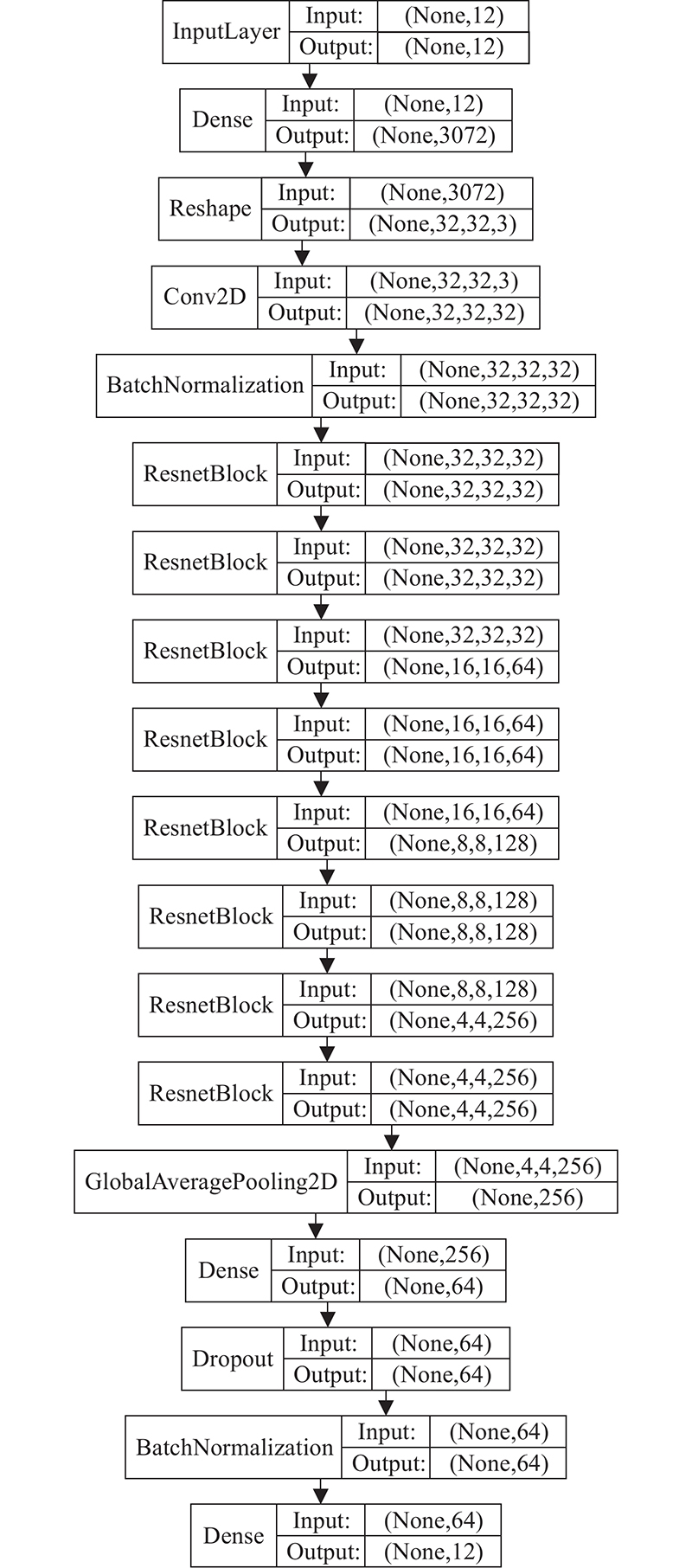
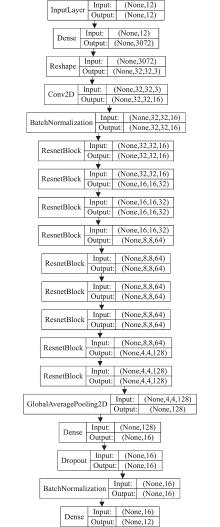
Fig 4
HPO net"
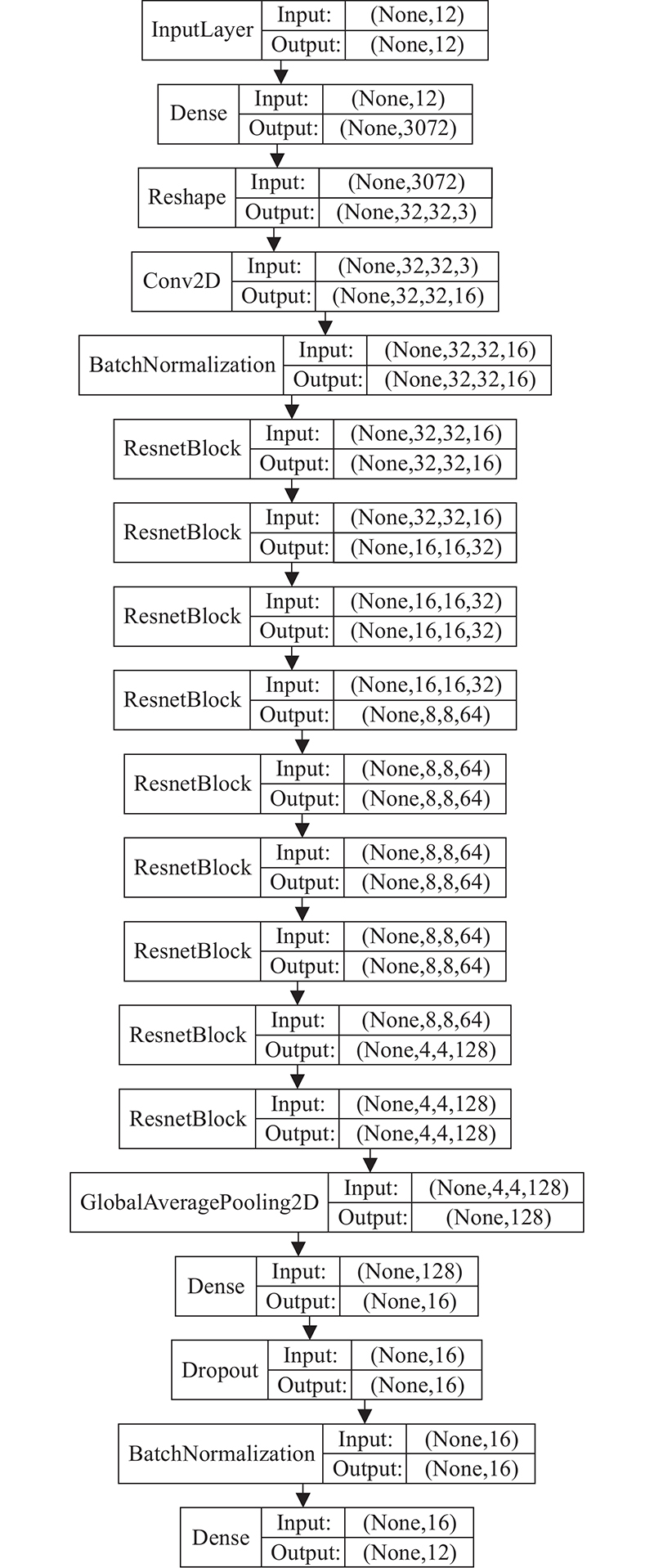
Fig 5
NAS net"
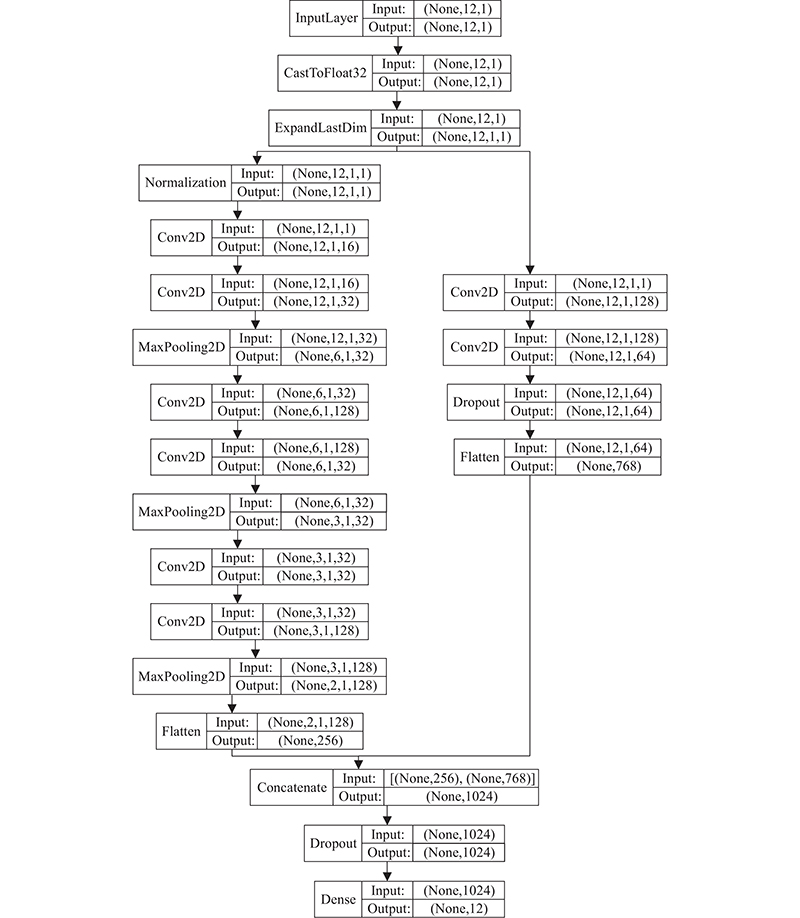
Table 2
Network information"
| Data name | Resnet18 | HPO net | NAS net |
| Total parameter | 2 857 260 | 888 588 | 545 103 |
| Trainable parameter | 2 852 332 | 885 708 | 545 100 |
| Non-trainable parameter | 4 928 | 2 880 | 3 |
| Learning rate | 0.0010 | 0.0059 | 0.0024 |
| Dropout rate | 0.3000 | 0.4958 | 0.2178 |
| Batch size | 64 | 128 | 64 |
| Max epoch | 600 | 600 | 600 |
| Loss function | MSE | MSE | MSE |
Table 3
Average performance of methods"
| Parameter | SADE | Resnet18 | HPO | NAS |
| Average time consumption/s | 183.9439 | 0.0038 | 0.0031 | 0.0016 |
| Average computation error | 0.0083 | 0.0082 | 0.0144 | 0.0072 |
| Standard deviation of error | 0.0072 | 0.0162 | 0.0232 | 0.0172 |

Fig 6
Comparison of time consumptions among different methods"
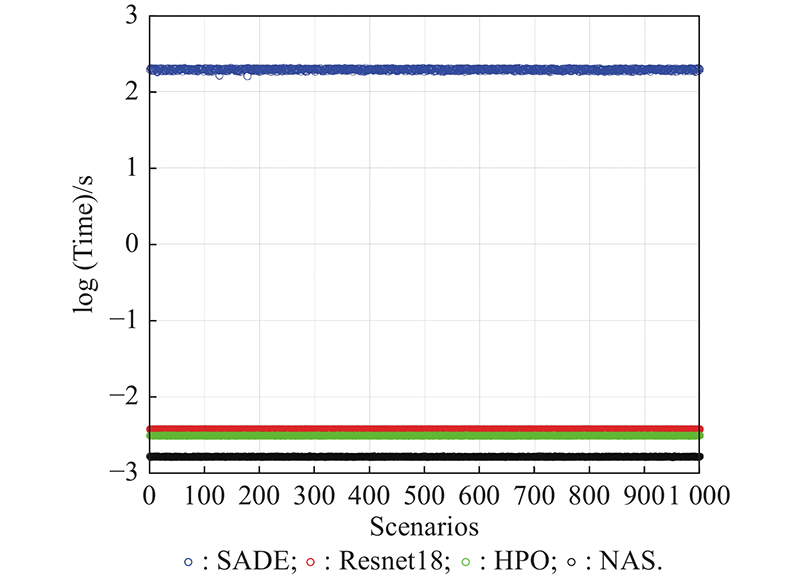
Fig 7
Comparison of computation error among different methods"
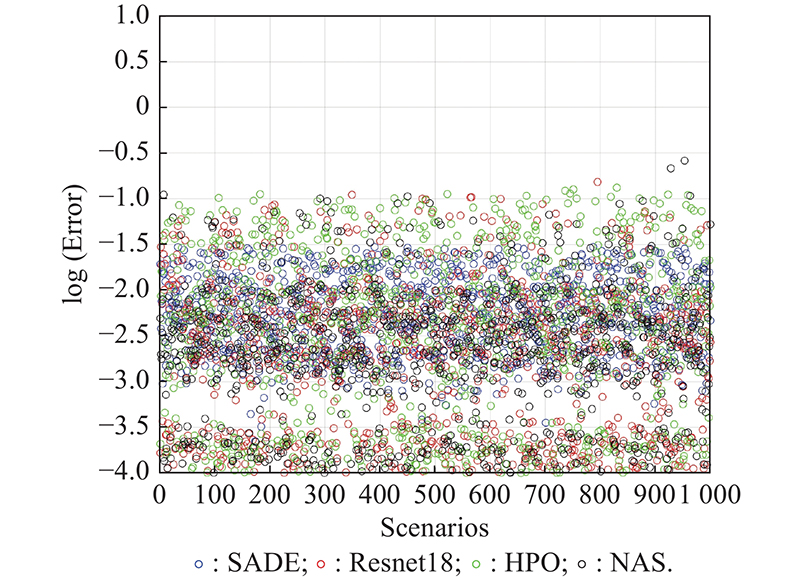
Table 4
Comparison results of four methods"
| Methods | Final time | Error | Computation time/s |
| SADE | 0.2434 | 0.0045 | 183.3176 |
| Resnet18 | 0.2571 | 0.0037 | 0.0037 |
| HPO | 0.2520 | 0.0057 | 0.0031 |
| NAS | 0.2138 | 0.0002 | 0.0016 |
Fig 8
Trajectories of different methods"
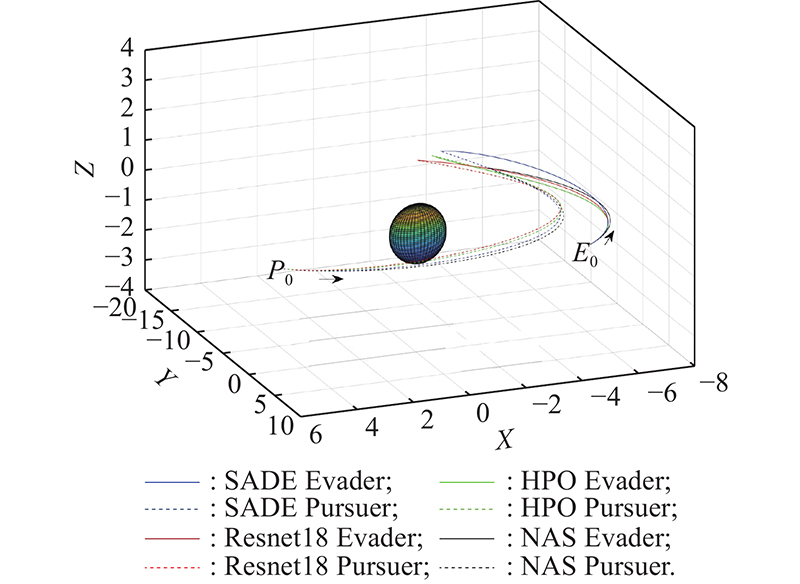
Fig 9
Distance between Evader and Pursuer"
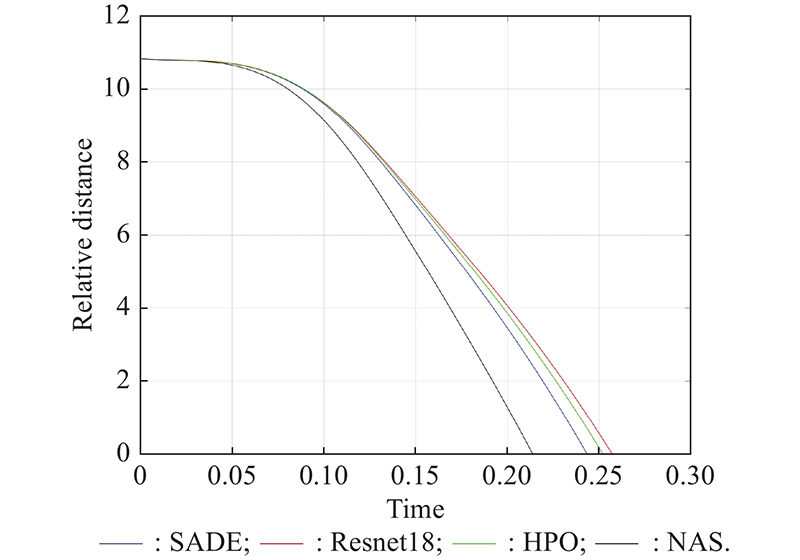

Fig 10
Time histories of Evader states"
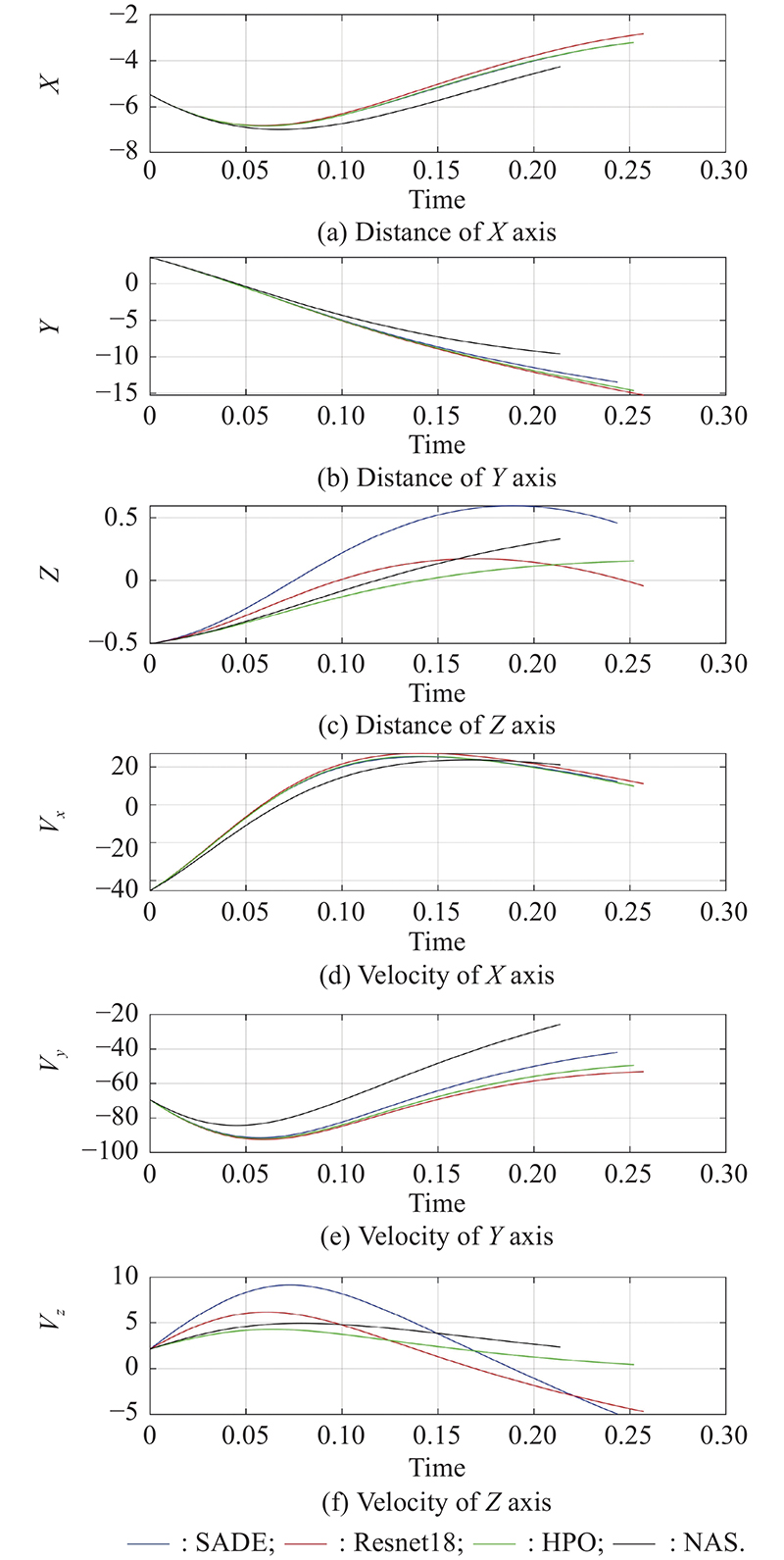

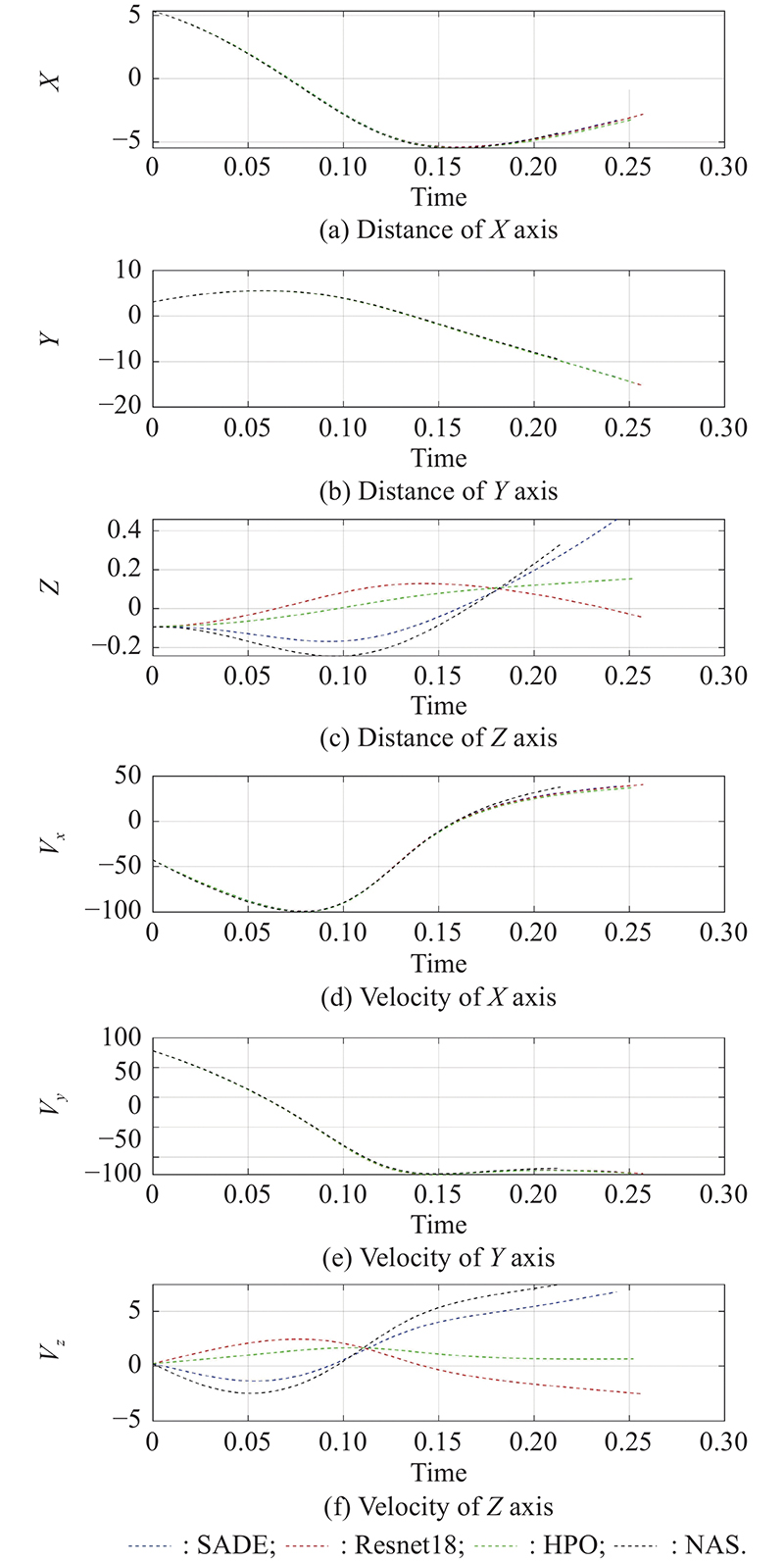
Fig 11
Time histories of Pursuer states"
| 1 | SHEN H X, CASALINO L Revisit of the three-dimensional orbital pursuit-evasion game. Journal of Guidance, Control and Dynamics, 2018, 41 (8): 1820- 1828. |
| 2 |
LI Z Y, ZHU H, YANG Z, et al A dimension-reduction solution of free-time differential games for spacecraft pursuit-evasion. Acta Astronautica, 2019, 163, 201- 210.
doi: 10.1016/j.actaastro.2019.01.011 |
| 3 |
LI Z Y, ZHU H, YANG Z, et al Saddle point of orbital pursuit-evasion game under J2-perturbed dynamics . Journal of Guidance, Control and Dynamics, 2020, 43 (9): 1733- 1739.
doi: 10.2514/1.G004459 |
| 4 | ISAACS R. Differential games. New York: Wiley, 1965. |
| 5 |
LUO Y Z, LI Z Y, ZHU H Survey on spacecraft orbital pursuit-evasion differential games. Scientia Sinica Technologica, 2020, 50 (12): 1533- 1545.
doi: 10.1360/SST-2019-0174 |
| 6 |
CHENG L, WANG Z B, JIANG F H, et al Real-time optimal control for spacecraft orbit transfer via multiscale deep neural networks. IEEE Trans. on Aerospace and Electronic Systems, 2019, 55 (5): 2436- 2450.
doi: 10.1109/TAES.2018.2889571 |
| 7 | WU Q C, LI B, LI J, et al Solution of infinite time domain spacecraft pursuit strategy based on deep neural network. Aerospace Control, 2019, 37 (6): 13- 18,58. |
| 8 | GEORGE B C. Optimal and robust neural network controllers for proximal spacecraft maneuvers. Dayton: Air Force Institute of Technology, 2019. |
| 9 |
ZENG X, ZHU Y W, YANG L P, et al A guidance method for coplanar orbital interception based on reinforcement learning. Journal of Systems Engineering and Electronics, 2021, 32 (4): 927- 938.
doi: 10.23919/JSEE.2021.000079 |
| 10 |
YIN S S, LI J, CHENG L Low-thrust spacecraft trajectory optimization via a DNN-based method. Advances in Space Research, 2020, 66 (7): 1635- 1646.
doi: 10.1016/j.asr.2020.05.046 |
| 11 | YAO Q M, WANG M S, CHEN Y Q, et al. Taking human out of learning applications: a survey on automated machine learning. https://arxiv.org/abs/1810.13306v4. |
| 12 | FRANK H, LARS K, JOAQUIN V. Automated machine learning methods, systems, challenges. Berlin: Springer, 2019. |
| 13 | YU T, ZHU H. Hyper-parameter optimization: a review of algorithms and applications. https://arxiv.org/abs/2003.05689v1. |
| 14 |
WISTUBA M, SCHILLING N, SCHMIDT-THIEME L Scalable Gaussian process-based transfer surrogates for hyperparameter optimization. Machine Learning, 2018, 107 (1): 43- 78.
doi: 10.1007/s10994-017-5684-y |
| 15 | CHRIS T, FRANK H, HOLGER H, et al. Auto-WEKA: combined selection and hyperparameter optimization of classification algorithms. Proc. of the 19th ACM SIGKDD International Conference on Knowledge Discovery and Data Mining, 2013: 847−855. |
| 16 | JAMES B, REMI B, YOSHUA B, et al. Algorithms for hyper-parameter optimization. Proc. of the 24th International Conference on Neural Information Processing Systems, 2011: 2546−2554. |
| 17 |
KRIZHEVSKY A, SUTSKEVER I, HINTON G E Imagenet: classification with deep convolutional neural networks. Communications of the ACM, 2017, 60 (6): 84- 90.
doi: 10.1145/3065386 |
| 18 |
HE X, ZHAO K Y, CHU X W AutoML: a survey of the state-of-the-art. Knowledge-Based Systems, 2021, 212, 106622.
doi: 10.1016/j.knosys.2020.106622 |
| 19 | STORK J, ZAEFFERER M, BARTZ-BEIELSTEIN T. Improving neuroevolution efficiency by surrogate model-based optimization with phenotypic distance kernels. https://arxiv.org/abs/1902.03419v1. |
| 20 | CAMERO A, WANG H, ALBA E, et al. Bayesian neural architecture search using a training-free performance metric. https://arxiv.org/abs/2001.10726. |
| 21 | JIN H F, SONG Q Q, HU X. Auto-Keras: an efficient neural architecture search system. Proc. of the 25th ACM SIGKDD International Conference on Knowledge Discovery & Data Mining, 2019: 1946−1956. |
| 22 | BASAR T, OLSDER G. Dynamic non-cooperative game theory. Philadelphia: Society for Industrial and Applied Mathematics, 1999. |
| 23 |
JIANG F H, BAOYIN H X, LI J F Practical techniques for low-thrust trajectory optimization with homotopic approach. Journal of Guidance, Control, and Dynamics, 2012, 35 (1): 245- 258.
doi: 10.2514/1.52476 |
| 24 |
FAMILI A, SHEN W M, WEBER R, et al Data preprocessing and intelligent data analysis. Intelligent Data Analysis, 1997, 1 (1): 3- 23.
doi: 10.3233/IDA-1997-1102 |
| 25 | FRANK H, HOLGER H H, KEVIN L B. Sequential model-based optimization for general algorithm configuration. Proc. of the 5th International Conference on Learning and Intelligent Optimization, 2011: 507−523. |
| 26 |
DONALD R J A taxonomy of global optimization methods based on response surfaces. Journal of Global Optimization, 2001, 21 (4): 345- 383.
doi: 10.1023/A:1012771025575 |
| 27 |
ZENG Z P, ANTHONY K H T, WANG J Y, et al Comparing stars: on approximating graph edit distance. Proceedings of the VLDB Endowment, 2009, 2 (1): 25- 36.
doi: 10.14778/1687627.1687631 |
| 28 | PETER A, NICOLO C B, PAUL F Finite-time analysis of the multiarmed bandit problem. Machine Learning, 2002, 47 (2): 235- 256. |
| [1] | Chengming ZHANG, Yanwei ZHU, Leping YANG, Xin ZENG. An optimal guidance method for free-time orbital pursuit-evasion game [J]. Journal of Systems Engineering and Electronics, 2022, 33(6): 1294-1308. |
| [2] | Fuyunxiang YANG, Leping YANG, Yanwei ZHU, Xin ZENG. A DNN based trajectory optimization method for intercepting non-cooperative maneuvering spacecraft [J]. Journal of Systems Engineering and Electronics, 2022, 33(2): 438-446. |
| [3] | Shengnan FU, Liang WANG, Qunli XIA. Trajectory optimization of a reentry vehicle based on artificial emotion memory optimization [J]. Journal of Systems Engineering and Electronics, 2021, 32(3): 668-680. |
| [4] | Zhen Wang and Zhong Wu. Six-DOF trajectory optimization for reusable launch vehicles via Gauss pseudospectral method [J]. Journal of Systems Engineering and Electronics, 2016, 27(2): 434-441. |
| [5] | Lu Wang, Qinghua Xing, and Yifan Mao. Reentry trajectory rapid optimization for hypersonic vehicle satisfying waypoint and no-fly zone constraints [J]. Systems Engineering and Electronics, 2015, 26(6): 1277-1290. |
| [6] | Jiang Zhao, Rui Zhou, and Xuelian Jin. Progress in reentry trajectory planning for hypersonic vehicle [J]. Journal of Systems Engineering and Electronics, 2014, 25(4): 627-. |
| [7] | Xia Qunli, Guo Tao & Qi Zaikang. Study of trajectory optimization using terminal-node adaptive-altered spline algorithm [J]. Journal of Systems Engineering and Electronics, 2009, 20(3): 551-557. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||