
Journal of Systems Engineering and Electronics ›› 2023, Vol. 34 ›› Issue (5): 1343-1358.doi: 10.23919/JSEE.2023.000113
• Control Theory and Application • Previous Articles Next Articles
Jiawei XIA1,2( ), Xufang ZHU3,*(), Zhong LIU1(), Qingtao XIA1()
), Xufang ZHU3,*(), Zhong LIU1(), Qingtao XIA1()
Received:2021-08-18
Online:2023-10-18
Published:2023-10-30
Contact:
Xufang ZHU
E-mail:491650471@qq.com;1580284687@qq.com;liuzh531@163.com;xiaqing777@163.com
About author:Supported by:Jiawei XIA, Xufang ZHU, Zhong LIU, Qingtao XIA. LSTM-DPPO based deep reinforcement learning controller for path following optimization of unmanned surface vehicle[J]. Journal of Systems Engineering and Electronics, 2023, 34(5): 1343-1358.
Fig 1
Diagram of a USV path following control"
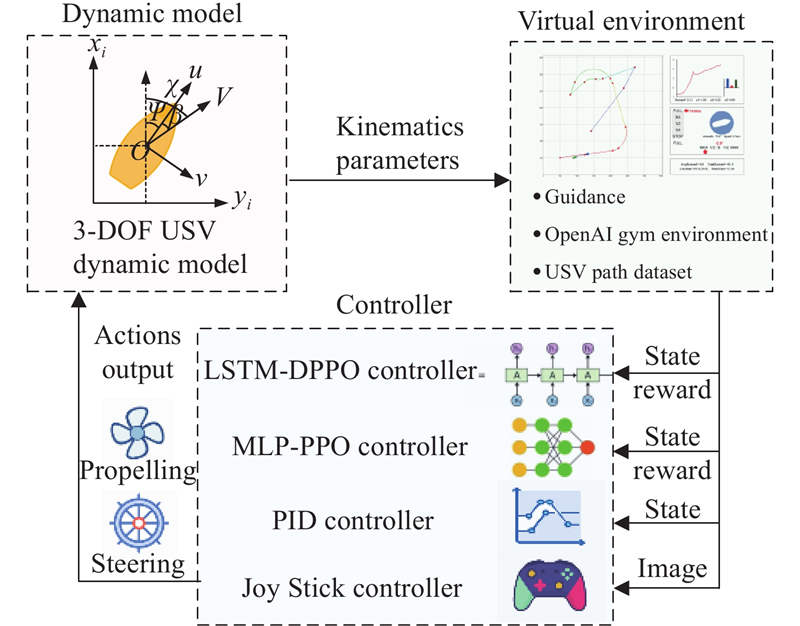

Fig 2
Coordinate system of a USV"
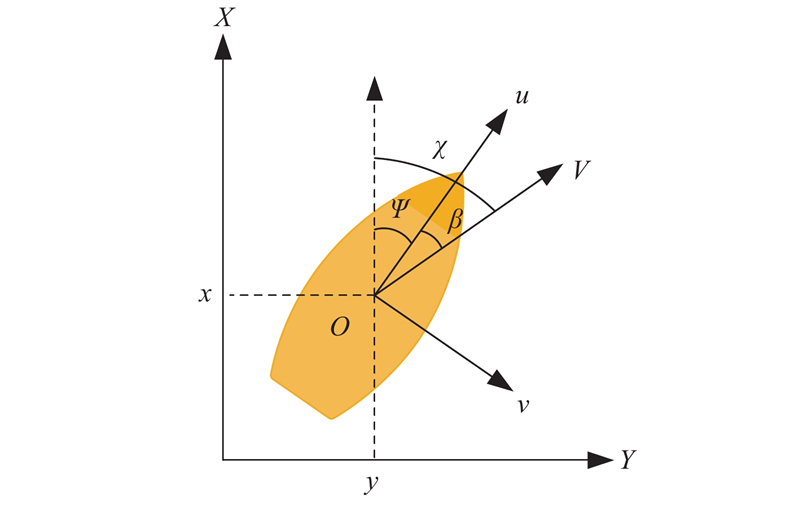
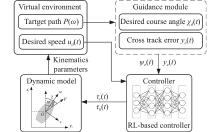
Fig 3
Diagram of guidance module for a RL-based controller"
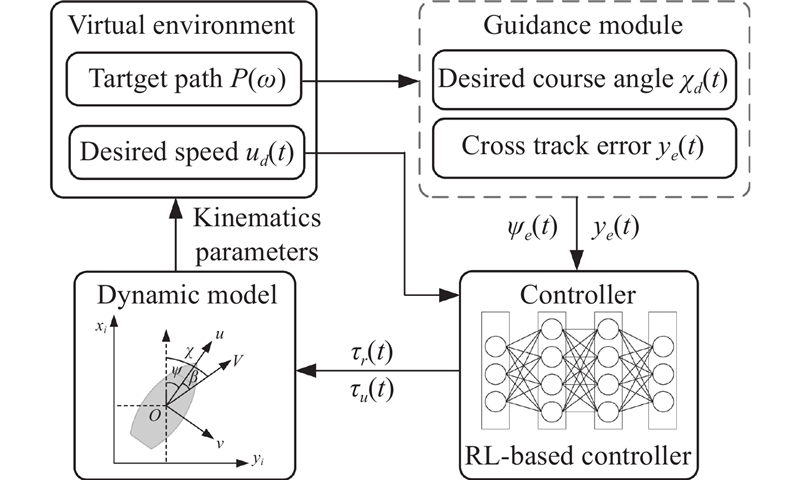
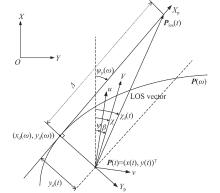
Fig 4
LOS guidance based on the look-ahead distance"
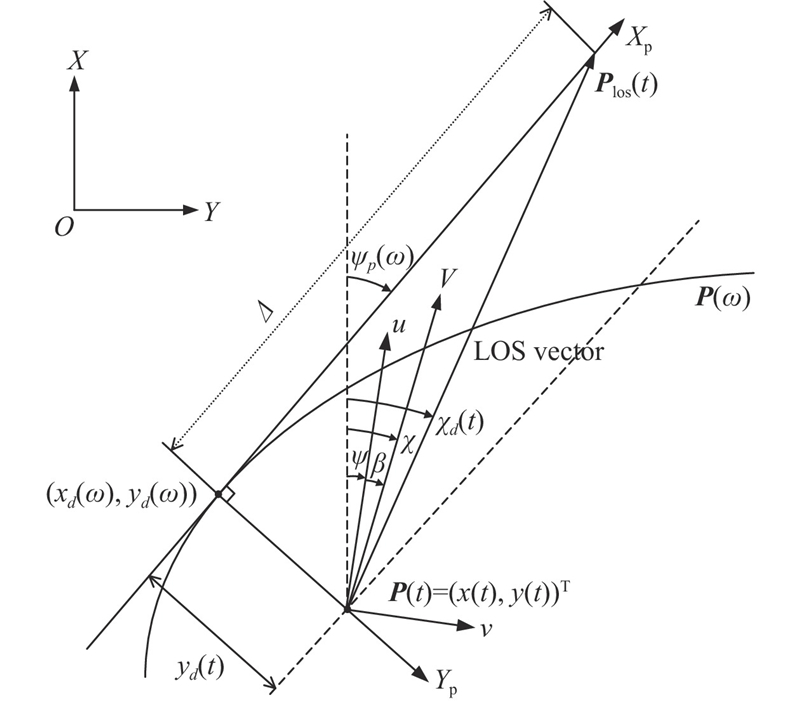
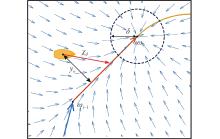
Fig 5
Diagram of a straight LOS guidance vector field"
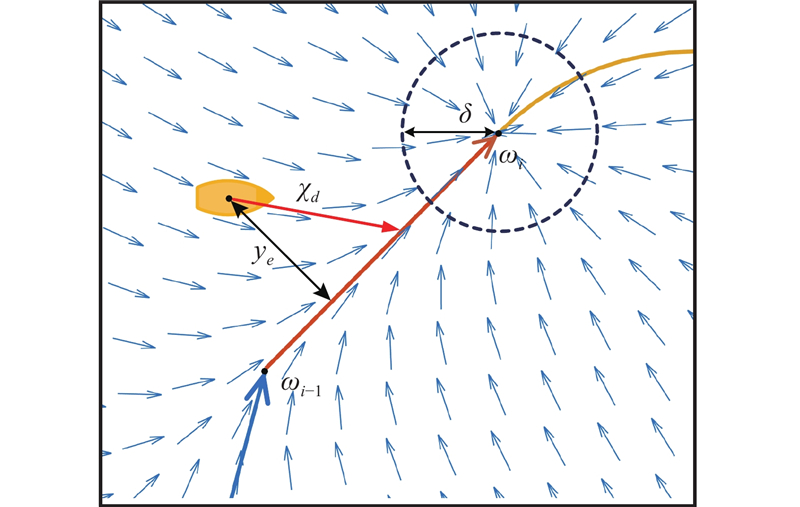
Fig 6
Diagram of a curved LOS guidance vector field"
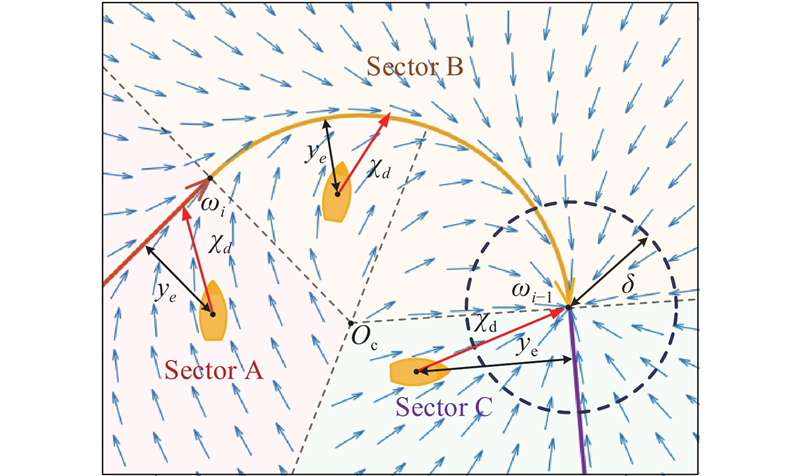
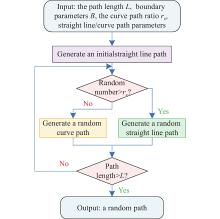
Fig 7
Flowchart for generating a random path"
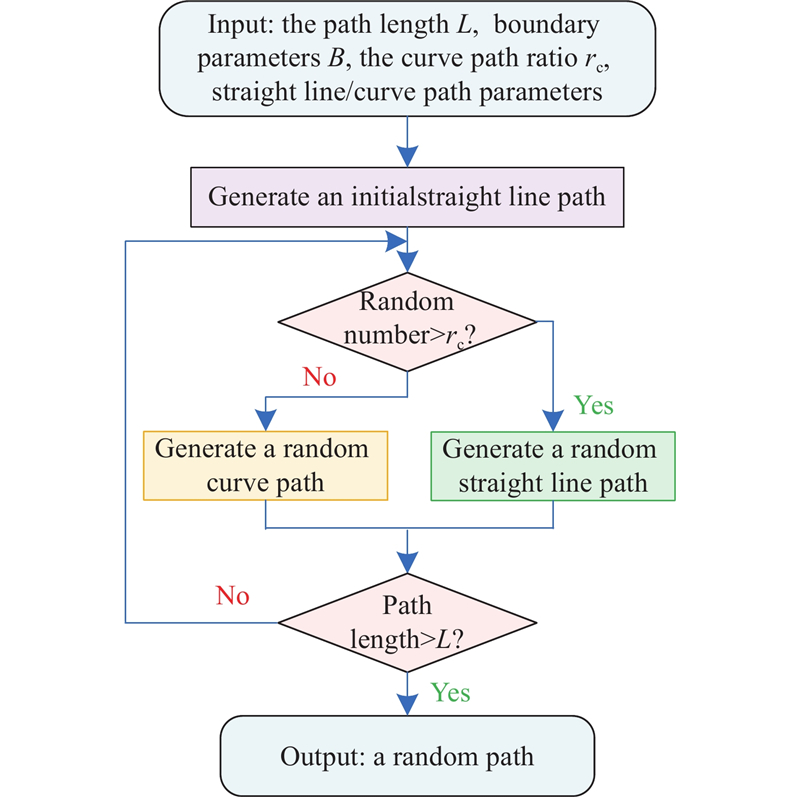
Fig 8
Detailed implementation of the random straight-line path and random curve path"
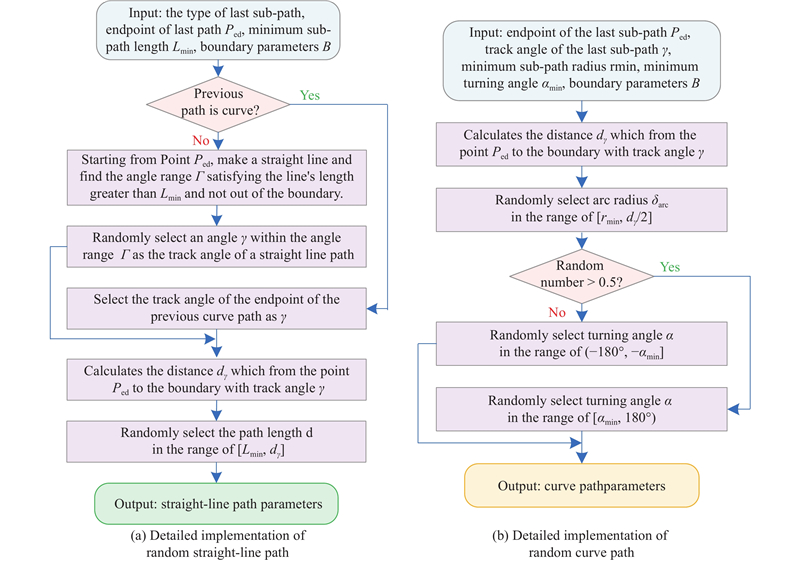

Fig 9
Instance diagram of random path dataset"

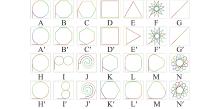
Fig 10
Dataset of 28 standard paths"
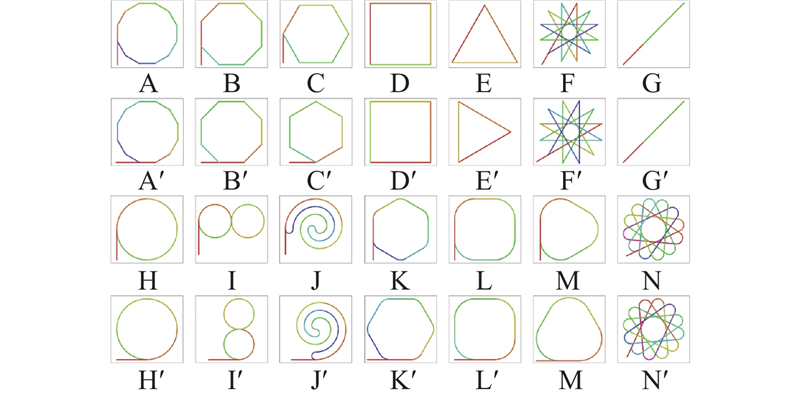
Fig 11
Composition and interaction of modules under a step function in a customized Gym environment"
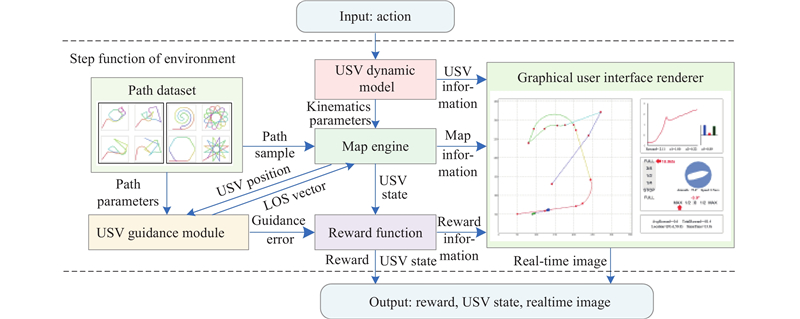
Table 1
Constraints and ranges for variables in state and action spaces"
| Variable | Meaning | Range |
| | Heading angle error | [−180,180] |
| | Heading angle error derivative | |
| | Cross-track error | |
| | Cross-track error derivative | |
| | Speed error | [−20,20] |
| | Power output | [−1,1] |
| | Steering output | [−1,1] |

Fig 12
Diagram of the policy network structure."
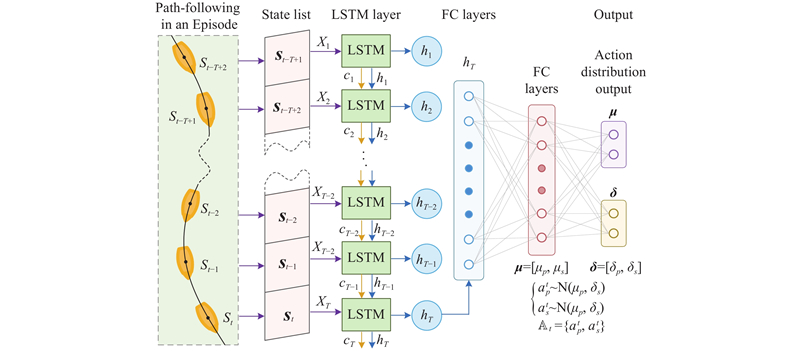
Fig 13
Training curve of the LSTM-DPPO"
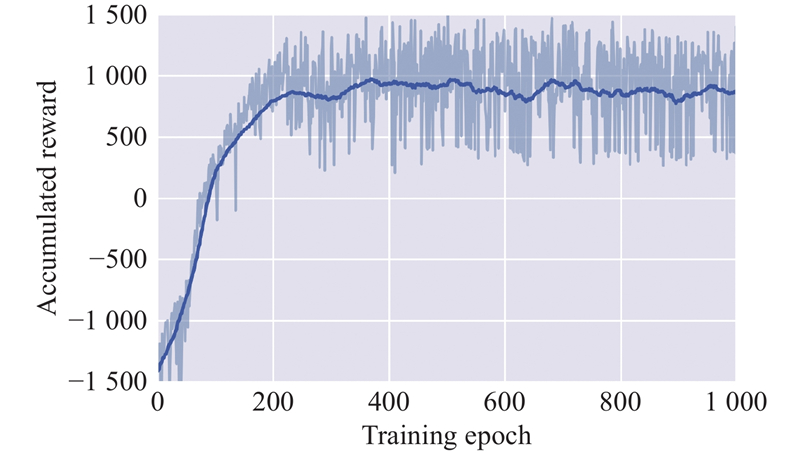

Fig 14
Trajectory of a typical polygonal path following with LSTM-DPPO"
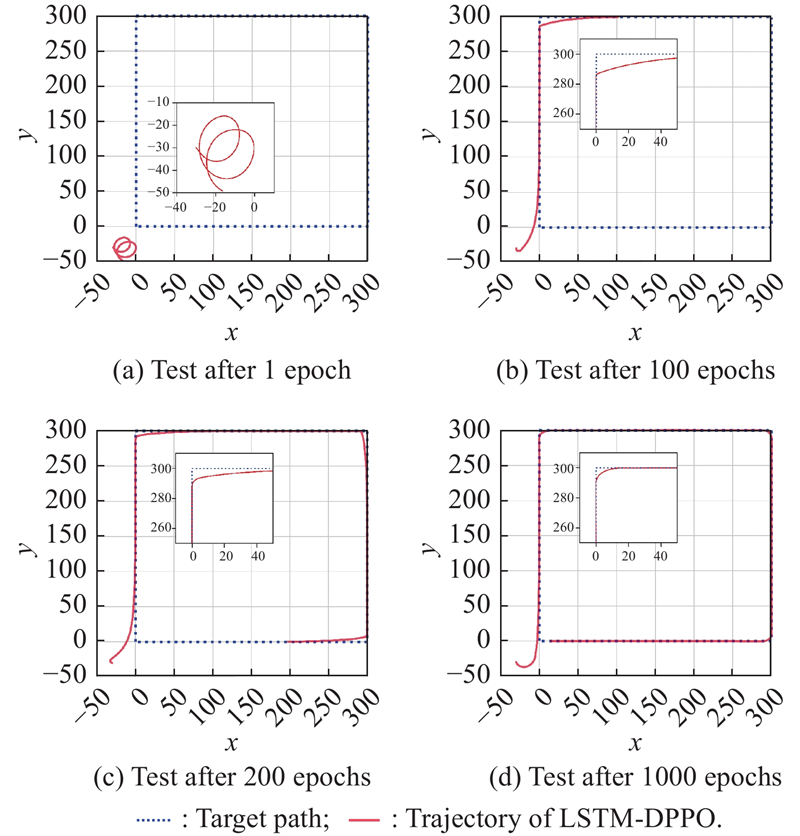

Fig 15
Trajectory of a typical curve path following with LSTM-DPPO"
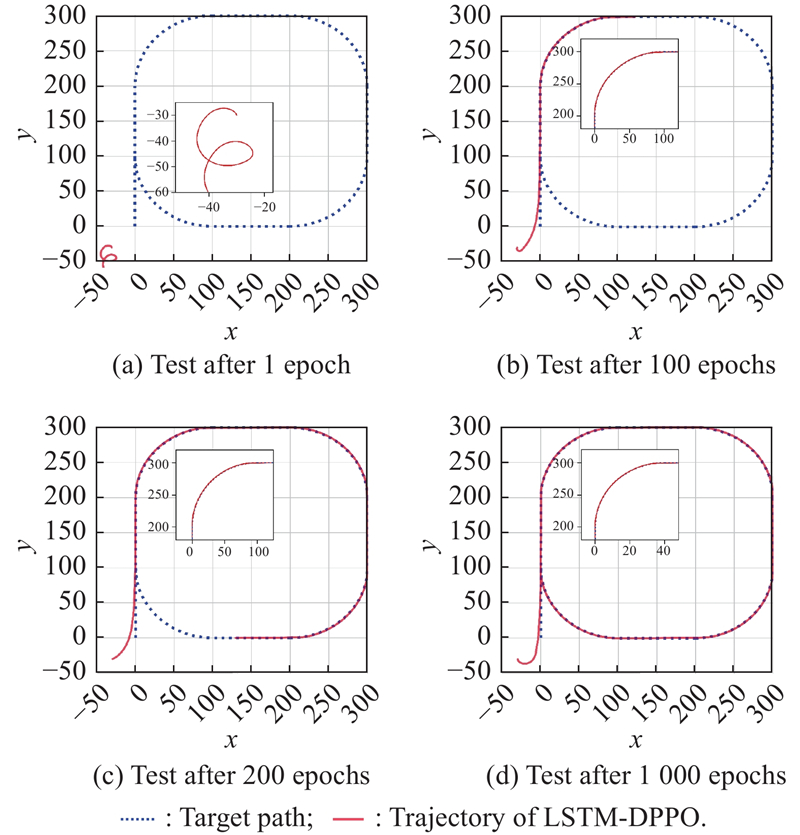
Fig 16
History of the heading angle and cross-track errors during the typical polygonal path following experiments with various training epochs"
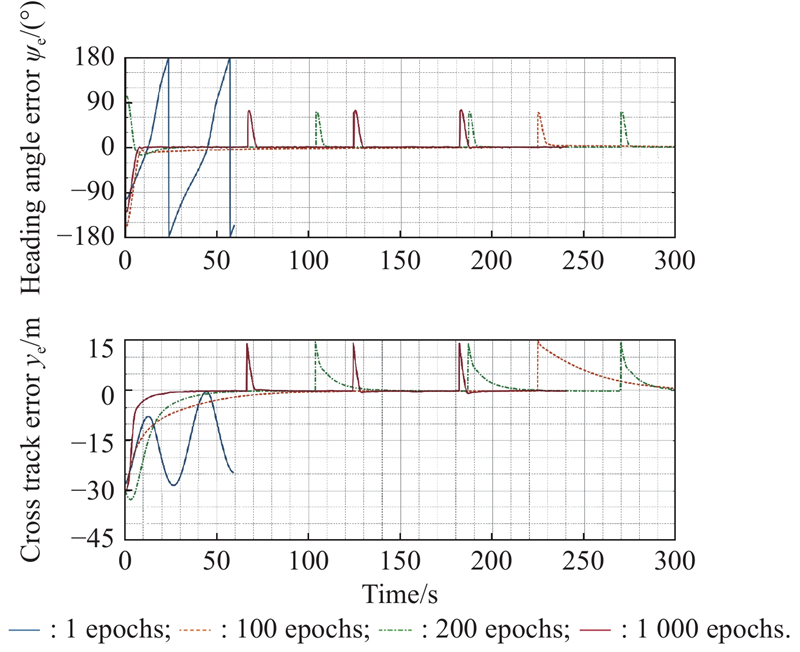
Fig 17
History of the heading angle and cross-track errors during the typical curved path following experiments with various training epochs"
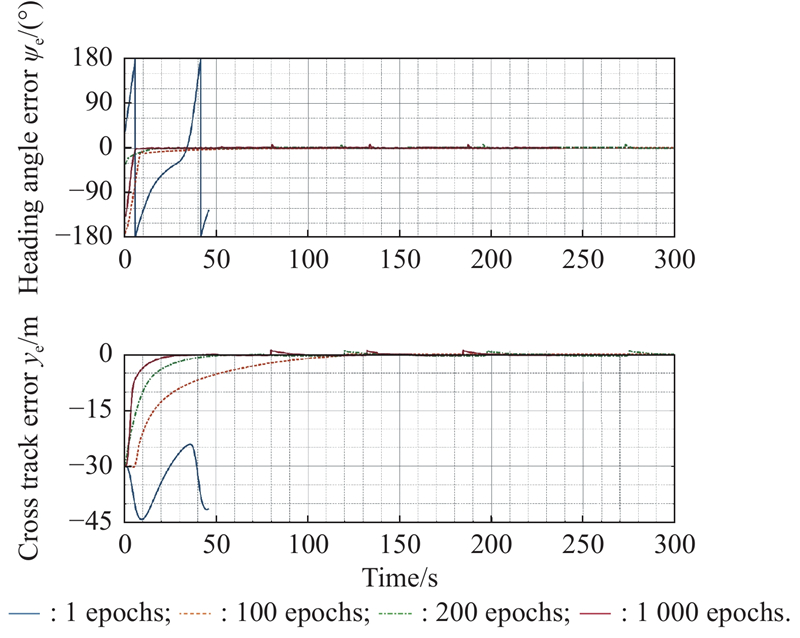
Fig 18
Trajectories of following the typical polygonal path with four control methods"
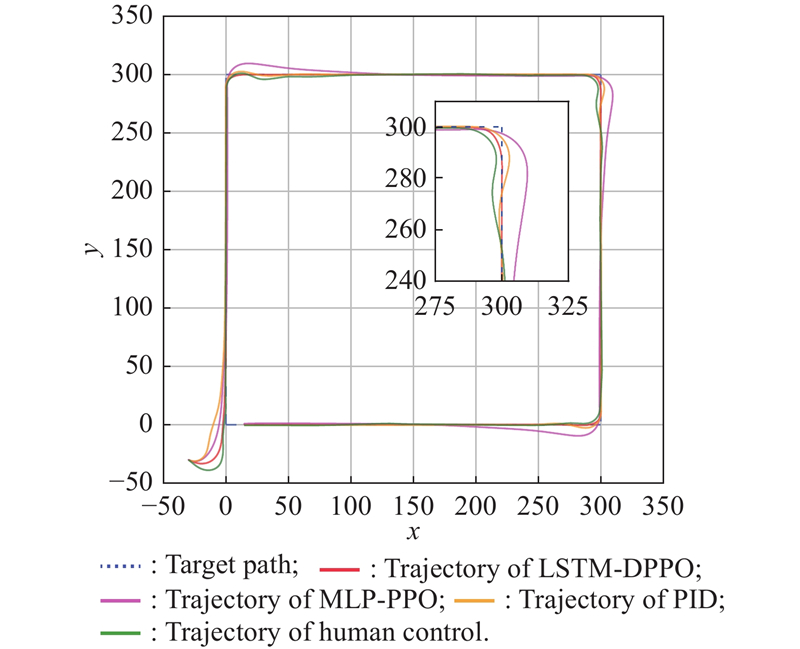
Fig 19
Trajectories of following the typical curved path with four control methods"
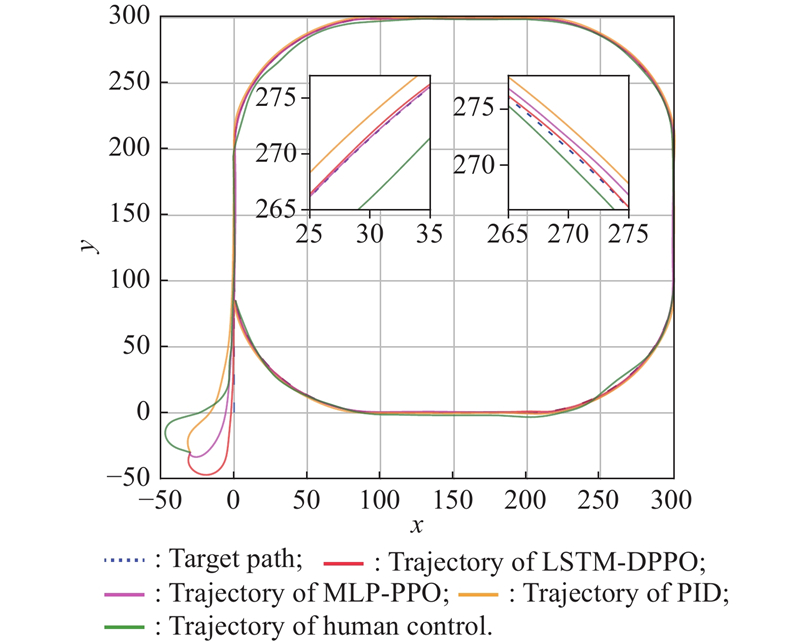
Fig 20
History of the heading angle and cross-track errors during the typical polygonal path following experiments with four control methods"
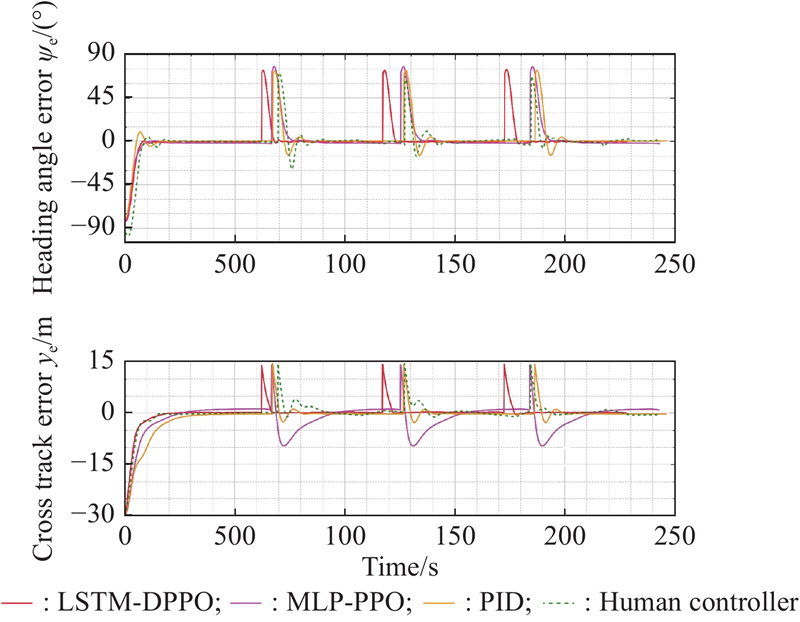
Table 2
Comparison results of the RMS for H.A.E. and C.T.E. during the path following validation"
| Performance indices using standard path datasets | LSTM-DPPO 100 epochs | LSTM-DPPO 200 epochs | LSTM-DPPO 1000 epochs | MLP-PPO | PID | Joystick | |
| Polygonal path | RMS H.A.E/(°) | 20.27 | 20.63 | 11.19 | 16.57 | 19.91 | 21.11 |
| RMS C.T.E/m | 3.78 | 3.38 | 3.12 | 3.80 | 4.49 | 5.26 | |
| Average reward | 0.59 | 0.65 | 0.78 | 0.70 | 0.72 | 0.65 | |
| Curved/mixed path | RMS H.A.E/(°) | 10.46 | 9.56 | 23.92 | 13.49 | 11.07 | 23.34 |
| RMS C.T.E/m | 3.35 | 3.81 | 3.55 | 3.78 | 3.90 | 5.28 | |
| Average reward | 0.62 | 0.66 | 0.73 | 0.73 | 0.74 | 0.69 | |
| All paths | RMS H.A.E/(°) | 17.46 | 17.47 | 14.83 | 14.91 | 17.39 | 21.56 |
| RMS C.T.E/m | 3.66 | 3.50 | 3.24 | 3.79 | 4.32 | 5.27 | |
| Average reward | 0.6 | 0.65 | 0.76 | 0.71 | 0.73 | 0.67 | |
Fig 21
History of the heading angle and cross-track errors during the typical curved path following experiments with four control methods"
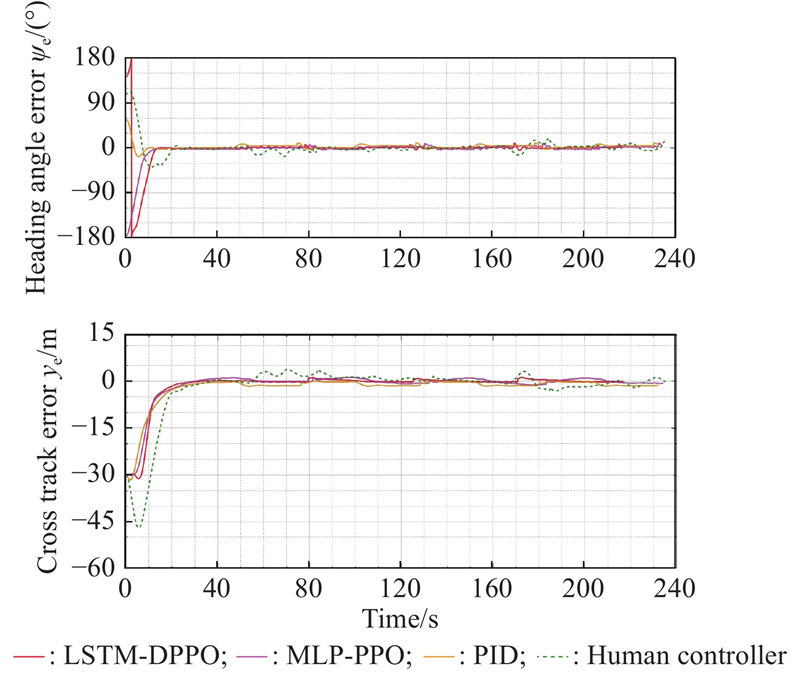
Table 3
Comparison results of the RMS for H.A.E. and C.T.E. in the varis scale of data set"
| Performance indices for standard path datasets | one sample | 10 samples | 100 samples | 1000 samples | |
| Polygonal path | RMS H.A.E/(°) | 21.28 | 21.60 | 19.05 | 11.19 |
| RMS C.T.E/m | 4.85 | 4.37 | 4.36 | 3.12 | |
| Average reward | 0.69 | 0.654 | 0.74 | 0.78 | |
| Curved/mixed path | RMS H.A.E/(°) | 13.23 | 9.09 | 8.70 | 23.92 |
| RMS C.T.E/m | 4.90 | 3.80 | 2.95 | 3.55 | |
| Average reward | 0.69 | 0.71 | 0.77 | 0.73 | |
| All paths | RMS H.A.E/(°) | 18.98 | 18.02 | 16.09 | 14.83 |
| RMS C.T.E/m | 4.87 | 4.21 | 3.96 | 3.24 | |
| Average reward | 0.69 | 0.67 | 0.75 | 0.76 | |
| 1 |
LI Z F, LIU Z, ZHANG J Q Multi-under-actuated unmanned surface vessel coordinated path tracking. Sensors, 2020, 20 (3): 864.
doi: 10.3390/s20030864 |
| 2 | WANG N, KARIMI H R Successive waypoints tracking of an underactuated surface vehicle. IEEE Trans. on Industrial Informatics, 2019, 16 (2): 898- 908. |
| 3 |
HINZE M, SCHMIDT A, LEINE R I The direct method of Lyapunov for nonlinear dynamical systems with fractional damping. Nonlinear Dynamics, 2020, 102, 2017- 2037.
doi: 10.1007/s11071-020-05962-3 |
| 4 |
LYU C X, YU H S, CHI J R, et al A hybrid coordination controller for speed and heading control of underactuated unmanned surface vehicles system. Ocean Engineering, 2019, 176, 222- 230.
doi: 10.1016/j.oceaneng.2019.02.007 |
| 5 | ROSARIO R V C, CUNHA J P V S. Experimental variable structure trajectory tracking control of a surface vessel with a motion capture system. Proc. of the 43rd Annual Conference of the IEEE Industrial Electronics Society, 2017: 2864−2869. |
| 6 |
TEMEL T, ASHRAFIUON H Sliding-mode speed controller for tracking of underactuated surface vessels with extended Kalman filter. Electronics Letters, 2015, 51 (6): 467- 469.
doi: 10.1049/el.2014.4516 |
| 7 |
FARAMIN M, GOUDARZI R H, MALEKI A Track-keeping observer-based robust adaptive control of an unmanned surface vessel by applying a 4-DOF maneuvering model. Ocean Engineering, 2019, 183, 11- 23.
doi: 10.1016/j.oceaneng.2019.04.051 |
| 8 | MA Y L, HAN J D, HE Y Q Design of strait-line tracking controller of under-actuated USV based on back-stepping method and feedback compensation. Applied Mechanics and Materials, 2011, 48, 391- 396. |
| 9 | WANG C X, XIE S R, CHEN H Z, et al A decoupling controller by hierarchical backstepping method for straight-line tracking of unmanned surface vehicle. Systems Science & Control Engineering, 2019, 7 (1): 379- 388. |
| 10 |
HUANG H B, GONG M, ZHUANG Y F, et al A new guidance law for trajectory tracking of an underactuated unmanned surface vehicle with parameter perturbations. Ocean Engineering, 2019, 175, 217- 222.
doi: 10.1016/j.oceaneng.2019.02.042 |
| 11 |
WANG N, SUN Z, YIN J C, et al Fuzzy unknown observer-based robust adaptive path following control of underactuated surface vehicles subject to multiple unknowns. Ocean Engineering, 2019, 176, 57- 64.
doi: 10.1016/j.oceaneng.2019.02.017 |
| 12 |
SHARMA S K, SUTTON R, MOTWANI A, et al Non-linear control algorithms for an unmanned surface vehicle. Proceedings of the Institution of mechanical engineers, Part M: Journal of Engineering for the Maritime Environment, 2014, 228 (2): 146- 155.
doi: 10.1177/1475090213503630 |
| 13 | SUN X J, WANG G F, FAN Y S, et al A formation autonomous navigation system for unmanned surface vehicles with distributed control strategy. IEEE Trans. on Intelligent Transportation Systems, 2020, 22 (5): 2834- 2845. |
| 14 |
MARTINSEN A B, LEKKAS A M, GROS S, et al Reinforcement learning-based tracking control of usvs in varying operational conditions. Frontiers in Robotics and AI, 2020, 7, 32.
doi: 10.3389/frobt.2020.00032 |
| 15 |
SILVER D, SCHRITTWIESER J, SIMONYAN K, et al Mastering the game of go without human knowledge. Nature, 2017, 550 (7676): 354- 359.
doi: 10.1038/nature24270 |
| 16 |
VINYALS O, BABUSCHKIN I, CZARNECKI W M, et al Grandmaster level in StarCraft II using multi-agent reinforcement learning. Nature, 2019, 575 (7782): 350- 354.
doi: 10.1038/s41586-019-1724-z |
| 17 | WAN K F , LI B, GAO X G, et al A learning-based flexible autonomous motion control method for UAV in dynamic unknown environments. Journal of Systems Engineering and Electronics, 2021, 32 (6): 1490- 1508. |
| 18 | SONG W P , CHEN Z Q, SUN M W, et al Reinforcement learning based parameter optimization of active disturbance rejection control for autonomous underwater vehicle. Journal of Systems Engineering and Electronics, 2022, 33 (1): 170- 179. |
| 19 | MAGALHÃES J, DAMAS B, LOBO V Reinforcement learning: the application to autonomous biomimetic underwater vehicles control. IOP Conference Series: Earth and Environmental Science, 2018, 172 (1): 012019. |
| 20 | HUO Y J, LI Y P, FENG X S Model-free recurrent reinforcement learning for AUV horizontal control. IOP Conference Series: Materials Science and Engineering, 2018, 428 (1): 012063. |
| 21 |
XU H W, WANG N, ZHAO H, et al Deep reinforcement learning-based path planning of underactuated surface vessels. Cyber-Physical Systems, 2019, 5 (1): 1- 17.
doi: 10.1080/23335777.2018.1540018 |
| 22 | ZHAO Y J, QI X, MA Y, et al Path following optimization for an underactuated USV using smoothly-convergent deep reinforcement learning. IEEE Trans. on Intelligent Transportation Systems, 2020, 22 (10): 6208- 6220. |
| 23 | WANG N, ZHANG Y, AHN C K, et al Autonomous pilot of unmanned surface vehicles: bridging path planning and tracking. IEEE Trans. on Vehicular Technology, 2021, 71 (3): 2358- 2374. |
| 24 |
GONZALEZ G A, BARRAGAN A D, COLLADO G I, et al Adaptive dynamic programming and deep reinforcement learning for the control of an unmanned surface vehicle: experimental results. Control Engineering Practice, 2021, 111, 104807.
doi: 10.1016/j.conengprac.2021.104807 |
| 25 |
LEKKAS A M, FOSSEN T I Integral LOS path following for curved paths based on a monotone cubic Hermite spline parametrization. IEEE Trans. on Control Systems Technology, 2014, 22 (6): 2287- 2301.
doi: 10.1109/TCST.2014.2306774 |
| 26 |
NELSON D R, BARBER D B, MCLAIN T W, et al Vector field path following for miniature air vehicles. IEEE Trans. on Robotics, 2007, 23 (3): 519- 529.
doi: 10.1109/TRO.2007.898976 |
| 27 |
BIBULI M, BRUZZONE G, CACCIA M, et al Path-following algorithms and experiments for an unmanned surface vehicle. Journal of Field Robotics, 2009, 26 (8): 669- 688.
doi: 10.1002/rob.20303 |
| 28 |
FOSSEN T I, BREIVIK M, SKJETNE R Line-of-sight path following of underactuated marine craft. IFAC proceedings volumes, 2003, 36 (21): 211- 216.
doi: 10.1016/S1474-6670(17)37809-6 |
| 29 |
WOO J, YU C, KIM N Deep reinforcement learning-based controller for path following of an unmanned surface vehicle. Ocean Engineering, 2019, 183, 155- 166.
doi: 10.1016/j.oceaneng.2019.04.099 |
| 30 | SUTTON R S, BARTO A G. Reinforcement learning: an introduction. Cambridge: MIT Press, 2018. |
| 31 |
MNIH V, KAVUKCUOGLU K, SILVER D, et al Human-level control through deep reinforcement learning. Nature, 2015, 518 (7540): 529- 533.
doi: 10.1038/nature14236 |
| 32 | MNIH V, BADIA A P, MIRZA M, et al. Asynchronous methods for deep reinforcement learning. Proc. of the 33rd International Conference on International Conference on Machine Learning, 2016: 1928−1937. |
| 33 | LILLICRAP T P, HUNT J J, PRITZEL A, et al. Continuous control with deep reinforcement learning. https://arxiv.53yu.com/abs/1509.02971. |
| 34 | SCHULMAN J, WOLSKI F, DHARIWAL P, et al. Proximal policy optimization algorithms. https://arxiv.53yu.com/abs/1707.06347. |
| 35 | BØHN E, COATES E M, MOE S, et al. Deep reinforcement learning attitude control of fixed-wing uavs using proximal policy optimization. Proc. of the International Conference on Unmanned Aircraft Systems , 2019: 523−533. |
| 36 | SCHULMAN J, LEVINE S, ABBEEL P, et al. Trust region policy optimization. Proc. of the 32nd International Conference on International Conference on Machine Learning, 2015: 1889−1897. |
| 37 | SCHULMAN J, MORITZ P, LEVINE S, et al. High-dimensional continuous control using generalized advantage estimation. https://arxiv.53yu.com/abs/1506.02438. |
| 38 | HEESS N, TB D, SRIRAM S, et al. Emergence of locomotion behaviours in rich environments. https://arxiv.53yu.com/abs/1707.02286. |
| [1] | Yaozhong ZHANG, Yike LI, Zhuoran WU, Jialin XU. Deep reinforcement learning for UAV swarm rendezvous behavior [J]. Journal of Systems Engineering and Electronics, 2023, 34(2): 360-373. |
| [2] | Bohao LI, Yunjie WU, Guofei LI. Hierarchical reinforcement learning guidance with threat avoidance [J]. Journal of Systems Engineering and Electronics, 2022, 33(5): 1173-1185. |
| [3] | Dong FU, Xiangjun LI, Weihua MOU, Ming MA, Gang OU. Navigation jamming signal recognition based on long short-term memory neural networks [J]. Journal of Systems Engineering and Electronics, 2022, 33(4): 835-844. |
| [4] | Kaifang WAN, Bo LI, Xiaoguang GAO, Zijian HU, Zhipeng YANG. A learning-based flexible autonomous motion control method for UAV in dynamic unknown environments [J]. Journal of Systems Engineering and Electronics, 2021, 32(6): 1490-1508. |
| [5] | Yang ZHAO, Lili DONG. Adaptive back-stepping control on container ships for path following [J]. Journal of Systems Engineering and Electronics, 2020, 31(4): 780-791. |
| [6] | Xiao CHEN, Zhong LIU, Jianqiang ZHANG, Dechao ZHOU, Jiao DONG. Adaptive sliding-mode path following control system of the underactuated USV under the influence of ocean currents [J]. Journal of Systems Engineering and Electronics, 2018, 29(6): 1271-1283. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||