
Journal of Systems Engineering and Electronics ›› 2023, Vol. 34 ›› Issue (6): 1375-1396.doi: 10.23919/JSEE.2023.000153
• AUTONOMOUS DECISION AND COOPERATIVE CONTROL OF UAV SWARMS • Previous Articles Next Articles
Boyu QIN1,2( ), Dong ZHANG1,2,*(), Shuo TANG1,2(), Yang XU3()
), Dong ZHANG1,2,*(), Shuo TANG1,2(), Yang XU3()
Received:2023-06-11
Online:2023-12-18
Published:2023-12-29
Contact:
Dong ZHANG
E-mail:byqin@mail.nwpu.edu.cn;zhangdong@nwpu.edu.cn;stang@nwpu.edu.cn;yang.xu@nwpu.edu.cn
About author:Supported by:Boyu QIN, Dong ZHANG, Shuo TANG, Yang XU. Two-layer formation-containment fault-tolerant control of fixed-wing UAV swarm for dynamic target tracking[J]. Journal of Systems Engineering and Electronics, 2023, 34(6): 1375-1396.
Table 1
Some key notations"
| Nomenclature | Interpretation |
| Identity matrix with n dimensions | |
| Diagonal matrix | |
| Maximum and minimum eigenvalues | |
| Absolute value, p-norm | |
| Signum function, notation of | |
| Kronecker product | |
| Laplacian matrix | |
| Position coordinates of UAV i | |
| Velocity, path angle, and heading angle of UAV i | |
| Thrust, angle of attack, and banking angle of UAV i | |
| Virtual control input of UAV i | |
| Execution effectiveness, bias of UAV i’s actuator | |
| Measurement effectiveness, bias of UAV i’s angle sensor | |
| Integrated disturbance and its observed value of UAV i | |
| Reference position and velocity of UAV i generated by DFTE | |
| Position, velocity, and integrated disturbance of UAV i observed by FTESO | |
| Sliding mode variables |

Fig 1
Coordinate system and dynamics variables"
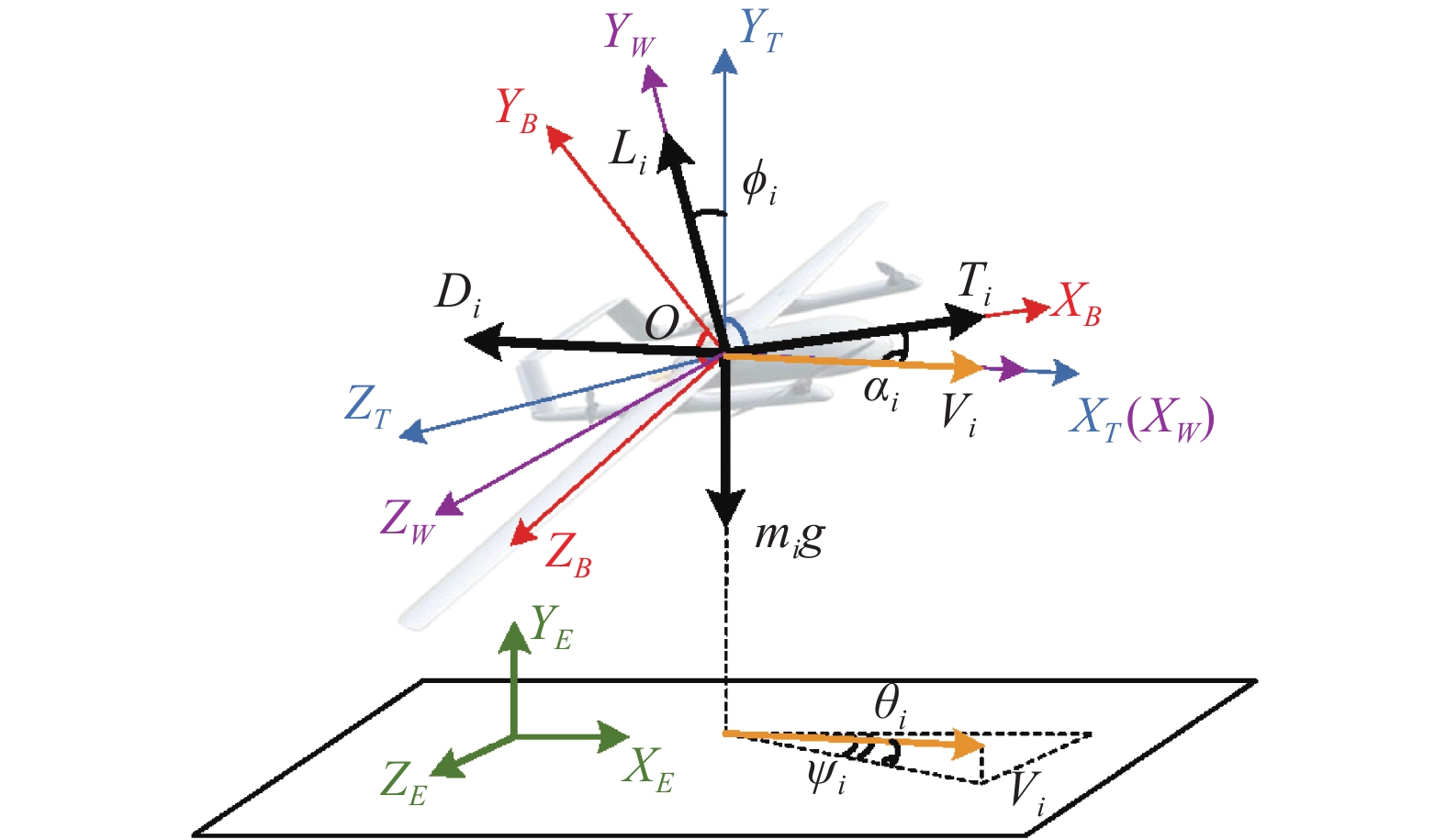

Fig 2
Hierarchical cooperative control framework"
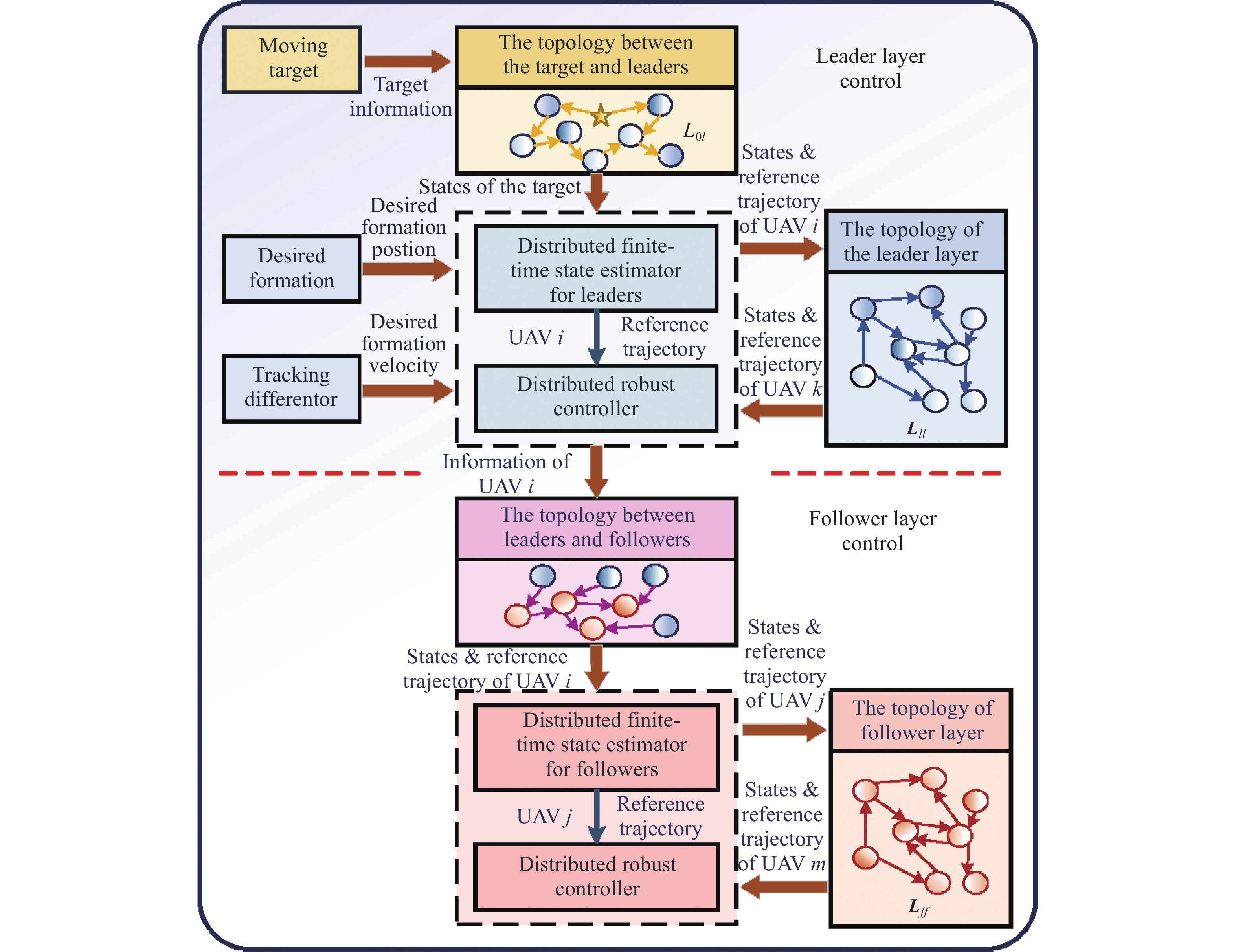
Fig 3
Structure of the control scheme"
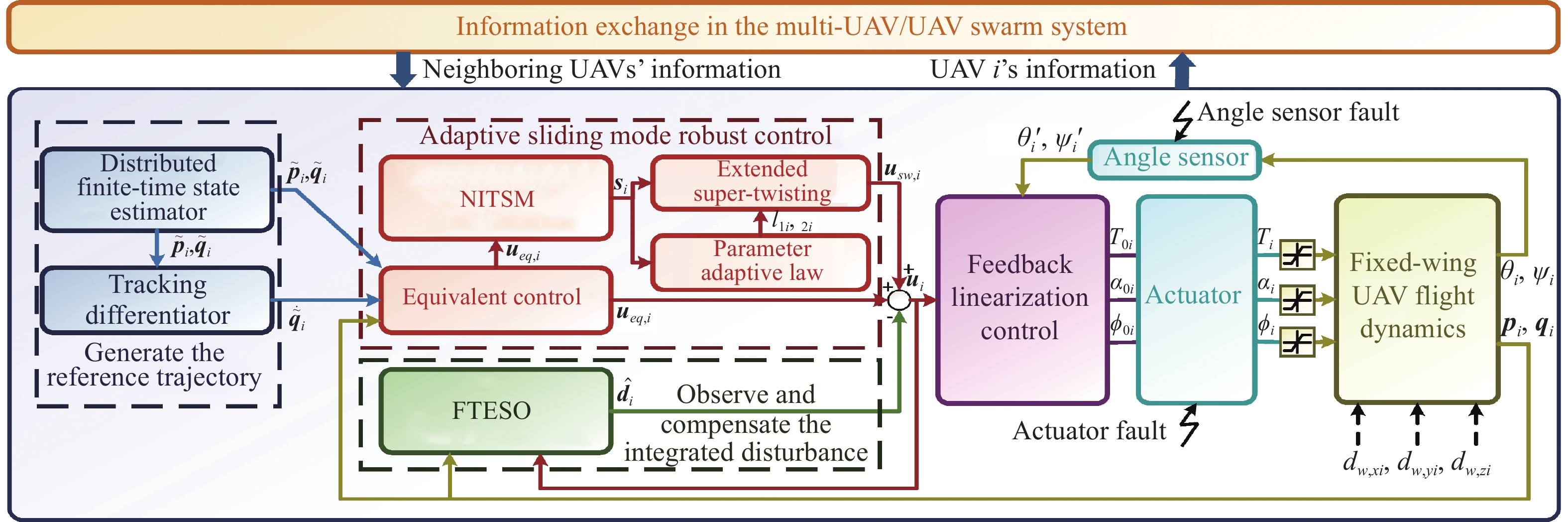

Fig 4
Topology of the UAV swarm"
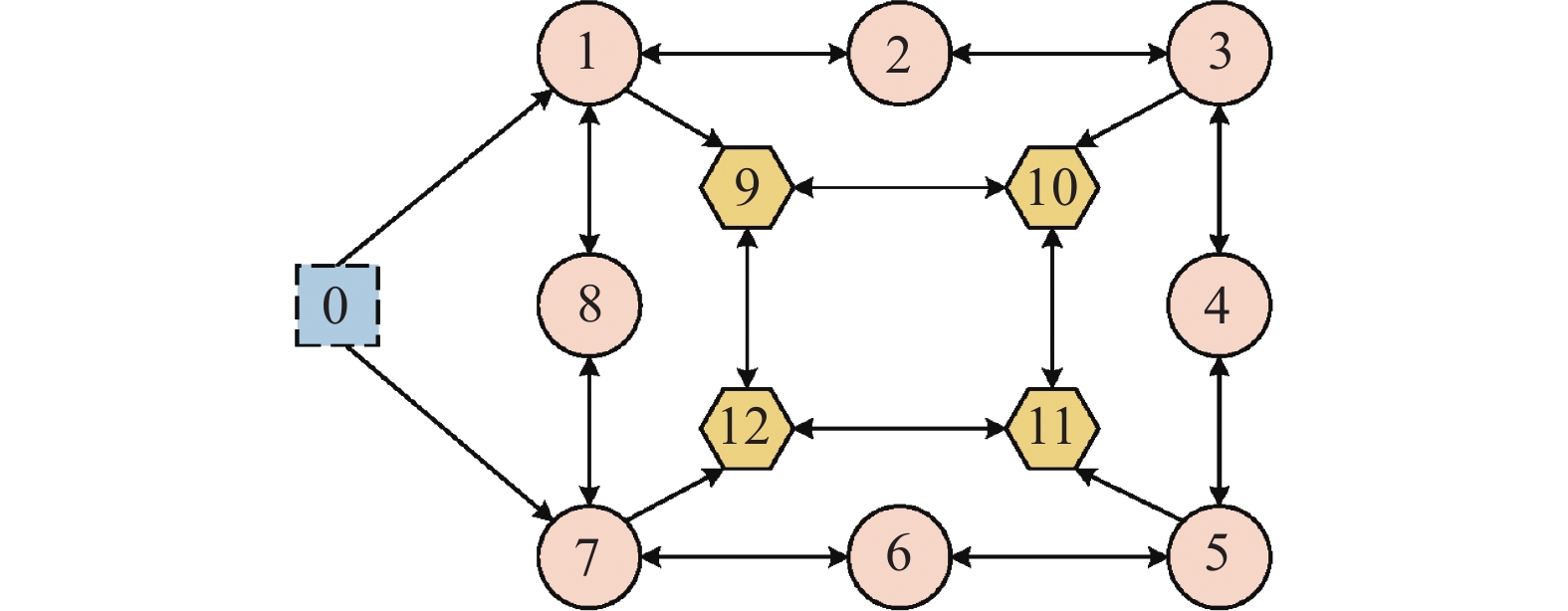
Table 2
Model parameters of each UAV"
| Parameter | Value |
| 1.5 | |
| 9.81 | |
| 1.225 | |
| 0.05 | |
| 0.06 | |
| 0.4 | |
| 0.06 | |
| 0.6 | |
| 0.15 |
Table 3
Fault signals encountered by each fixed-wing UAV (°)"
| Fault component | Fault signal | 0 s < t < 60 s | 60 s < t < 120 s | t > 120 s |
| Actuator fault | ηa,i1 | 1 | 0.3e−1.5(t − 60) + 0.7 | 0.3e−1.5(t − 60) + 0.7 |
| ηa,i2 | 1 | 0.25e−1.5(t − 60) + 0.75 | 0.25e−1.5(t − 60) + 0.75 | |
| ηa,i3 | 1 | 0.25e−1.5(t − 60) + 0.75 | 0.25e−1.5(t − 60) + 0.75 | |
| ba,i1 | 0 | −5(1 − e−1.5(t − 60)) | −5(1 − e−1.5(t − 60)) | |
| ba,i2 | 0 | 0.5(1 − e−1.5(t − 60)) | 0.5(1 − e−1.5(t − 60)) | |
| ba,i3 | 0 | 5(1 − e−1.5(t − 60)) | 5(1 − e−1.5(t − 60)) | |
| Sensor fault | ηm,i1 | 1 | 1 | 0.2e−(t − 120) + 0.8 |
| ηm,i2 | 1 | 1 | 0.2e−(t − 120) + 0.8 | |
| bm,i1 | 0 | 0 | 5(1 − e−(t − 120)) | |
| bm,i2 | 0 | 0 | 5(1 − e−(t − 120)) |
Table 4
Maneuver trajectory of the dynamic target and desired formation functions of each UAV"
| Scenario | Signal | Parameter | Value |
| Planar formation | Maneuver trajectory of the dynamic target | x0/m | 600sin(0.05t − π / 2) + 8t |
| y0 /m | 0 | ||
| z0 /m | 600cos(0.05t − π / 2) − 8t + 1500 | ||
| vx0/(m·s−1) | 30cos(0.05t − π / 2) + 8 | ||
| vy0/(m·s−1) | 0 | ||
| vz0 /(m·s−1) | −30sin(0.05t − π / 2) − 8 | ||
| The desired formation function (For UAV 1 to UAV 8) | hxi /m | 400cos(0.02t + π / 2) | |
| hyi /m | 50 | ||
| hzi /m | 400sin(0.02t + π / 2) | ||
| Cubic formation | Maneuver trajectory of the dynamic target | x0 /m | 1500sin(0.02t −π / 6) |
| y0/m | 50 + t | ||
| z0/m | 1500cos(0.02t − π / 6) | ||
| vx0/(m·s−1) | 30cos(0.02t − π / 6) | ||
| vy0/(m·s−1) | 1 | ||
| vz0/(m·s−1) | −30sin(0.05t − π / 6) | ||
| The desired formation function (For UAV 1 to UAV 8) | hxi /m | 500cos[0.02t +(2i − 1)π / 4] | |
| hyi /m | 25 (i = 1,2,3,4); −25 (i = 5,6,7,8) | ||
| hzi /m | 500sin[0.02t +(2i − 1)π / 4] |

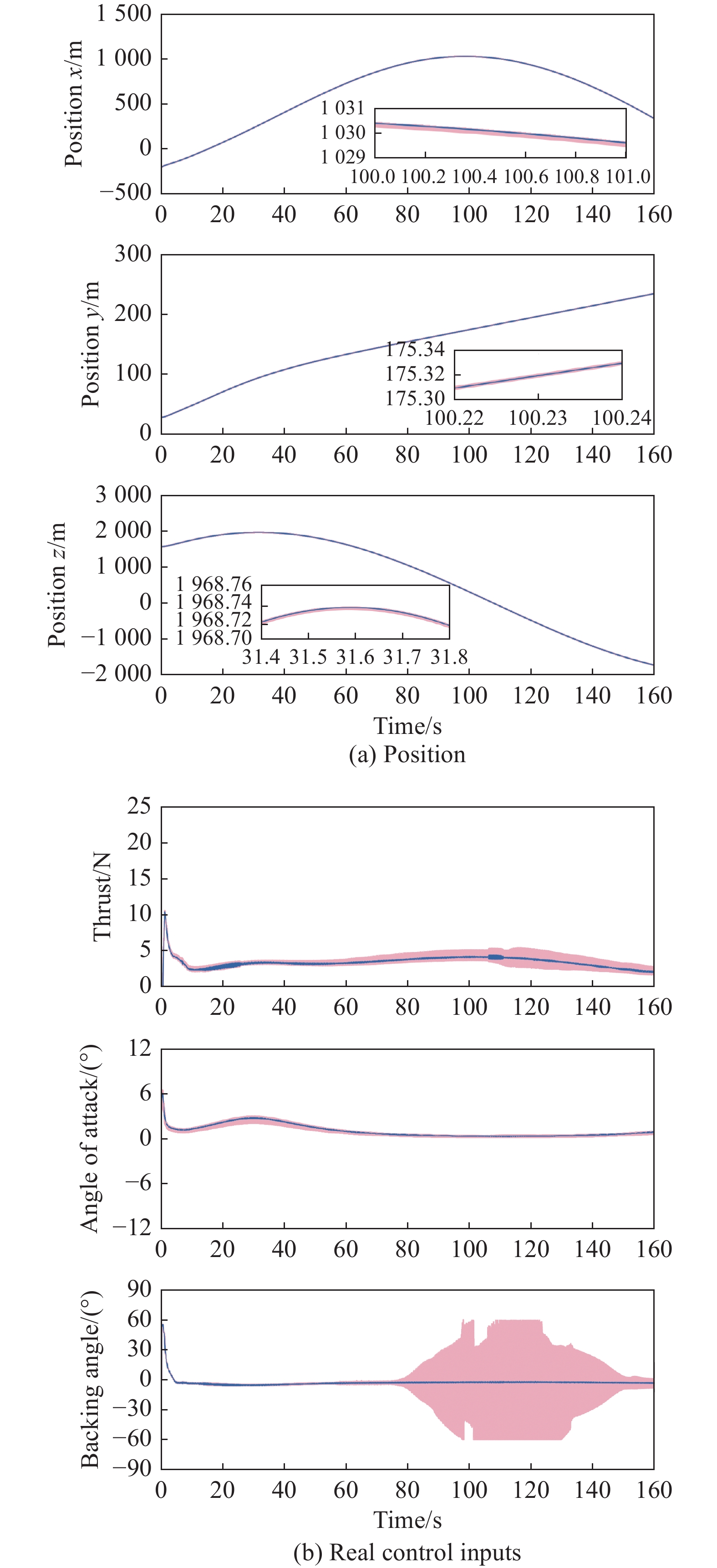
Fig 5
Trajectory of each UAV in the two scenarios"
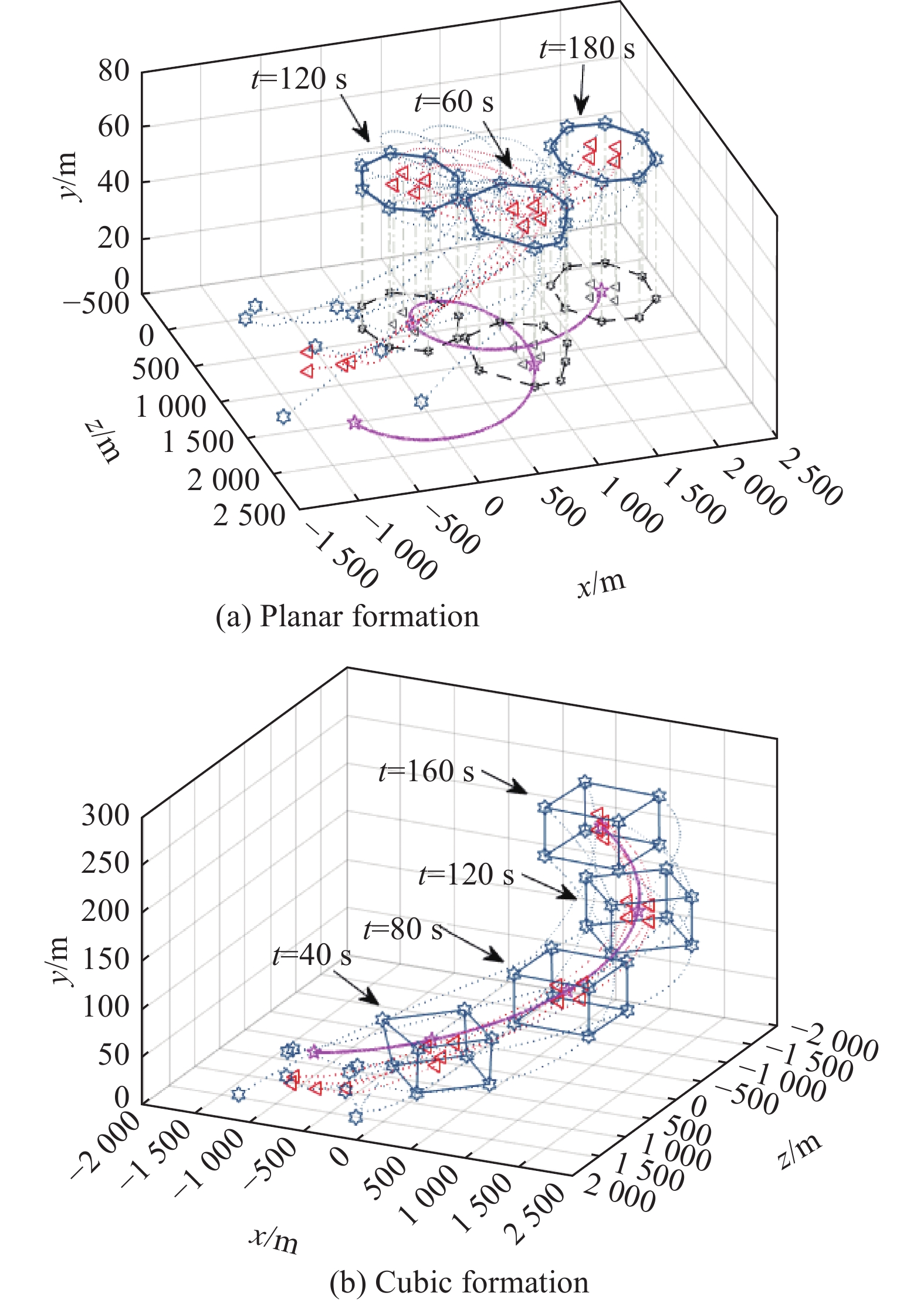

Fig 6
Relative error of position and velocity tracking"
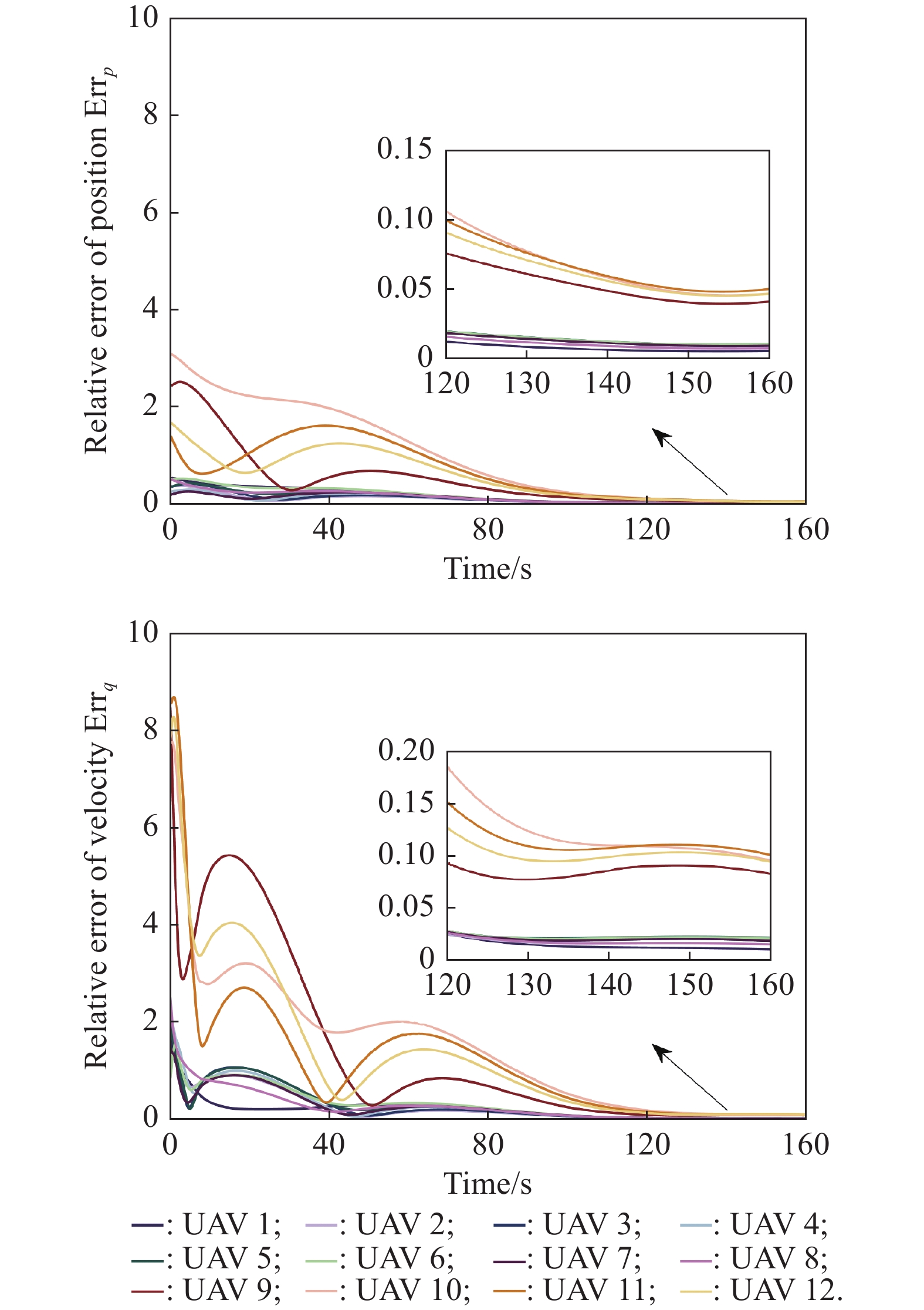

Fig 7
Variation of dynamics parameters and control input of each UAV"
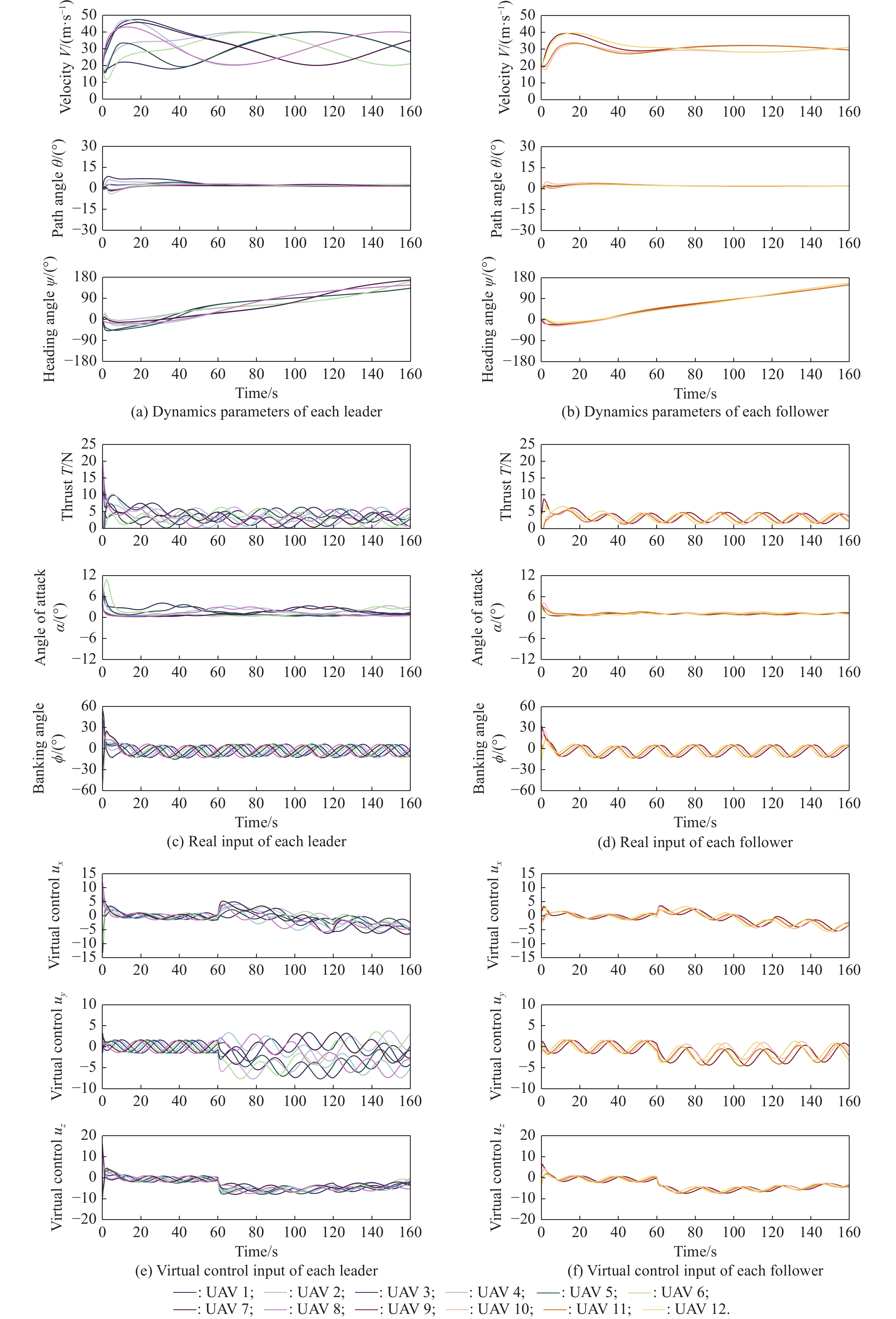

Fig 8
Disturbance estimate error"
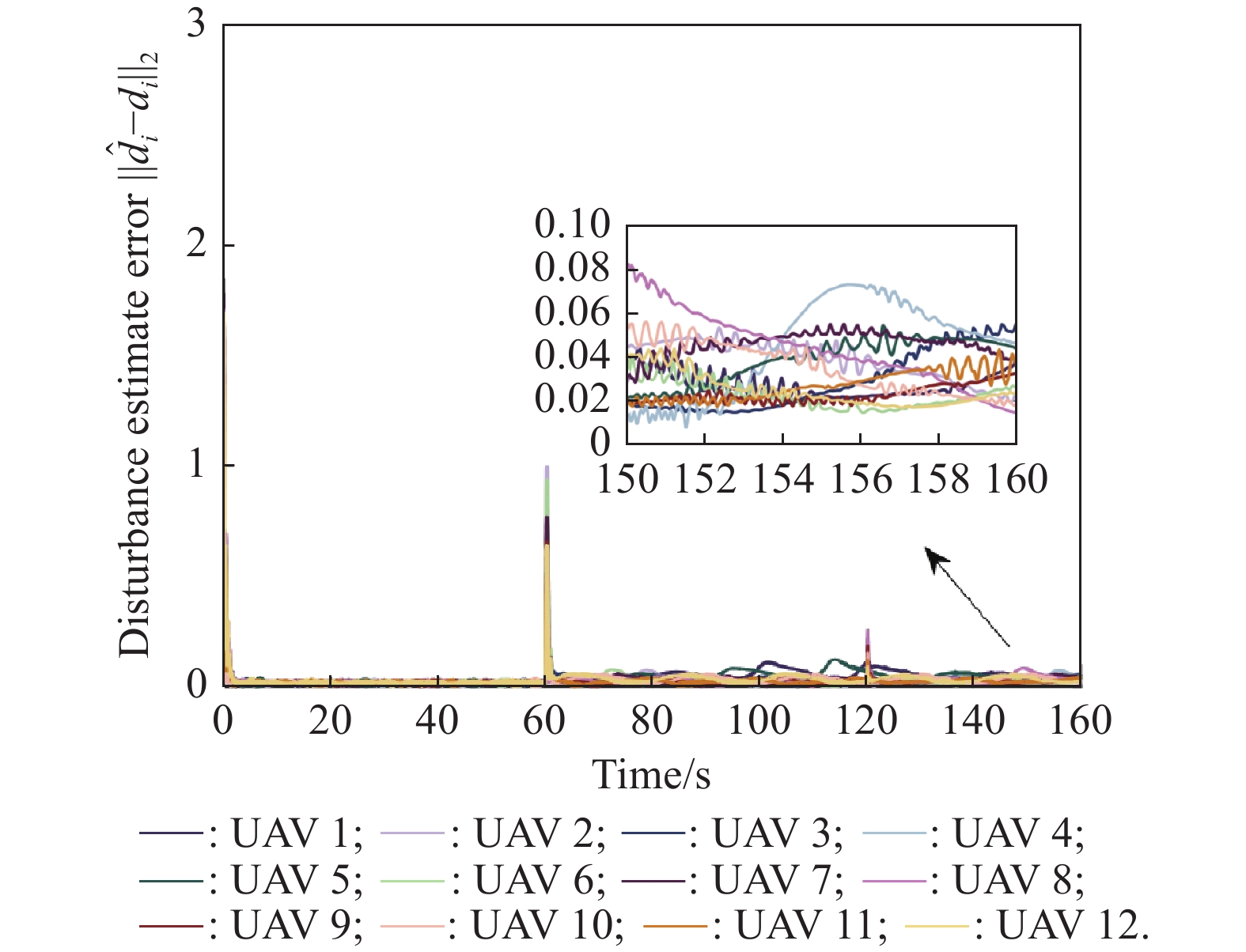
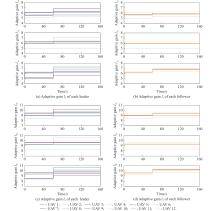
Fig 9
Adaptive gains of AESTW for each UAV"
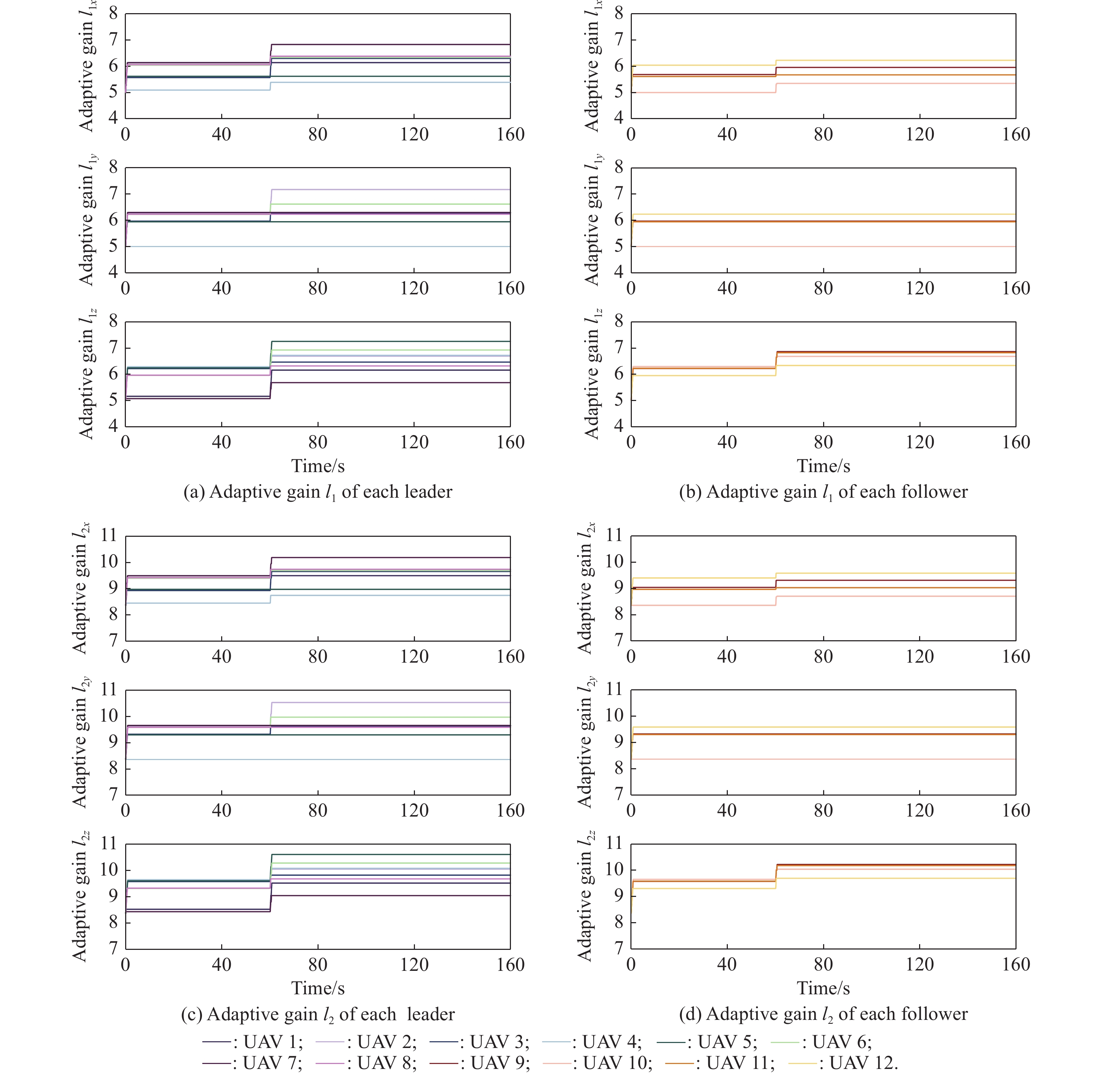

Fig 11
UAV 1’s x-orientation sliding mode variation varying with ${{\boldsymbol{\sigma}} _{\boldsymbol{1}}}$"

Fig 12
Input of each UAV with saturation limits"

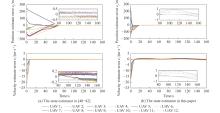
Fig 13
Position and velocity estimate errors of the DFTE in this paper and the estimator in [40-42]"
Fig 10
Estimate error variation varying with ${{\boldsymbol{\sigma}} _{\boldsymbol{0}}}$"
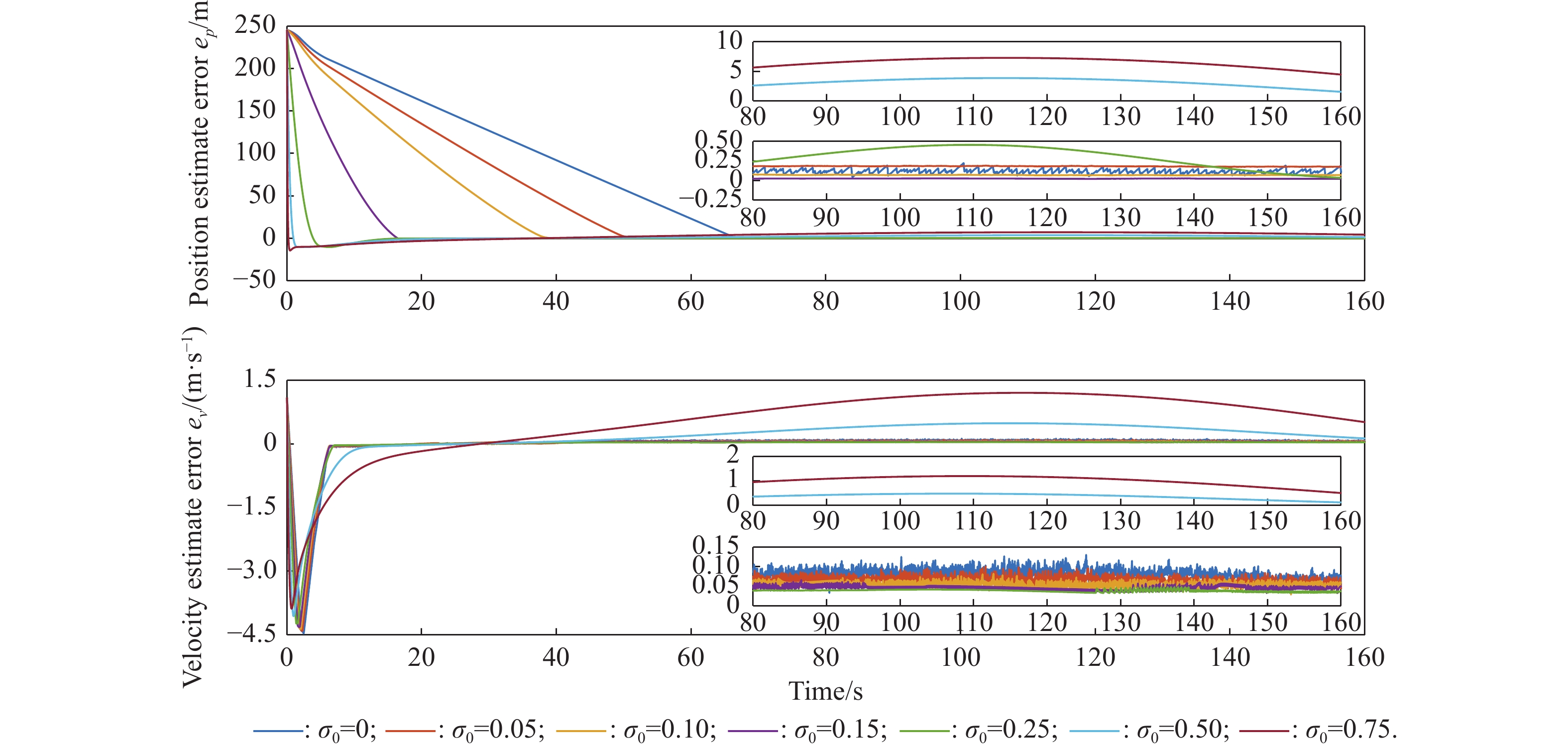

Fig 14
Variation comparison of x-orientation sliding mode variables of UAV 1"
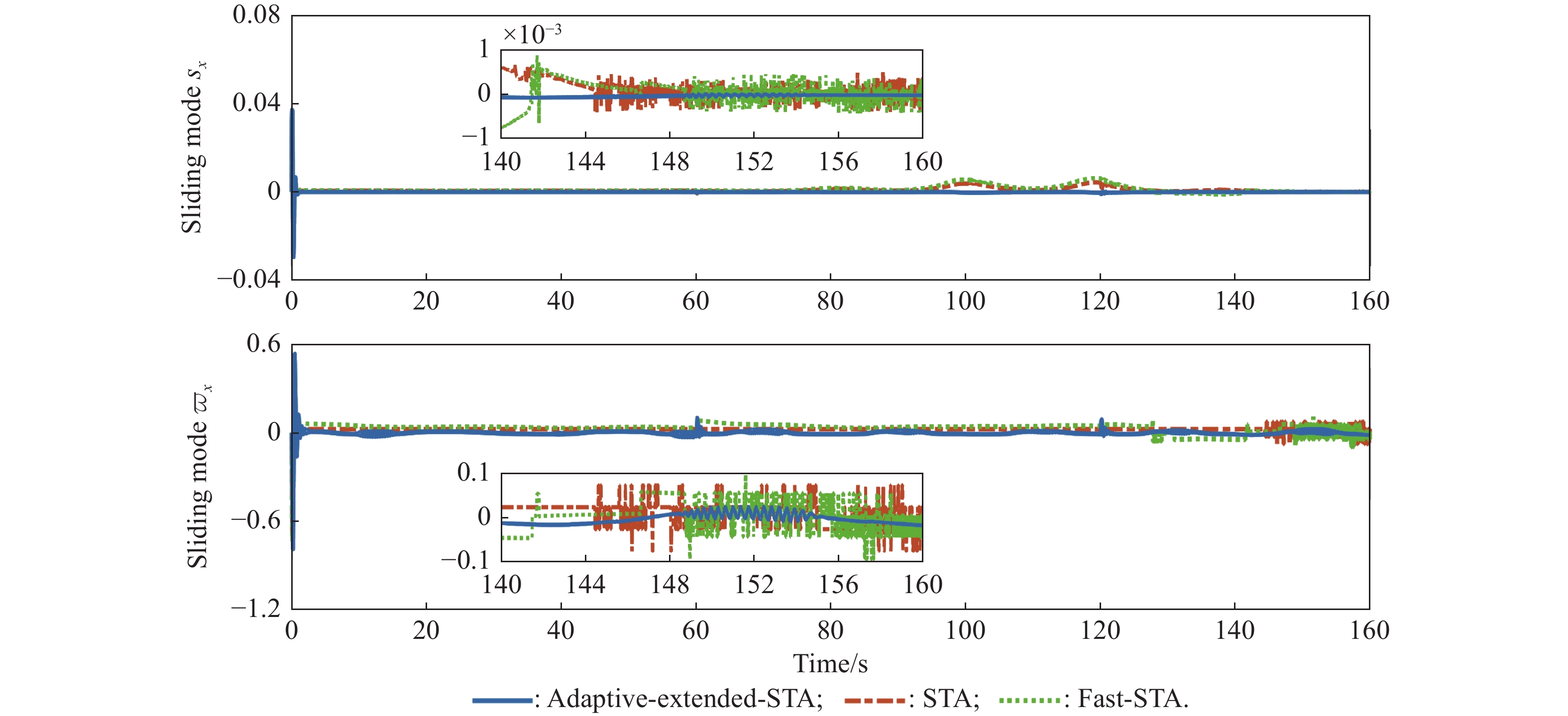

Fig 15
Results of UAV 1 in 500 Monte Carlo simulations"
| 1 |
MEI J, REN W, SONG Y D A unified framework for adaptive leaderless consensus of uncertain multi-agent systems under directed graphs. IEEE Trans. on Automatic Control, 2021, 66 (12): 6179- 6186.
doi: 10.1109/TAC.2021.3062594 |
| 2 |
SUN Q, CHEN J C, SHI Y Integral-type event-triggered model predictive control of nonlinear systems with additive disturbance. IEEE Trans. on Cybernetics, 2021, 51 (12): 5921- 5929.
doi: 10.1109/TCYB.2019.2963141 |
| 3 |
RUAN Z W, YANG Q M, GE S S, et al Adaptive fuzzy fault tolerant control of uncertain MIMO nonlinear systems with output constraints and unknown control directions. IEEE Trans. on Fuzzy Systems, 2022, 30 (5): 1224- 1238.
doi: 10.1109/TFUZZ.2021.3055336 |
| 4 |
XU Y, LUO D L, LI D Y, et al Target-enclosing affine formation control of two-layer networked spacecraft with collision avoidance. Chinese Journal of Aeronautics, 2019, 32 (12): 2679- 2693.
doi: 10.1016/j.cja.2019.04.016 |
| 5 |
LIN W Distributed UAV formation control using differential game approach. Aerospace Science and Technology, 2014, 35, 54- 62.
doi: 10.1016/j.ast.2014.02.004 |
| 6 |
WANG J A, XIN M Integrated optimal formation control of multiple unmanned aerial vehicles. IEEE Trans. on Control Systems Technology, 2013, 21 (5): 1731- 1744.
doi: 10.1109/TCST.2012.2218815 |
| 7 |
XU Y, LUO D L, YOU Y C, et al New advances in multiple autonomous aerial robots formation control technology. Science China-Technological Sciences, 2019, 62 (10): 1871- 1872.
doi: 10.1007/s11431-018-9457-9 |
| 8 |
ZHANG Q R, LIU H H T Robust nonlinear close formation control of multiple fixed-wing aircraft. Journal of Guidance, Control, and Dynamics, 2021, 44 (3): 572- 586.
doi: 10.2514/1.G004592 |
| 9 |
XU Y, LI D, LUO D L, et al Two-layer distributed hybrid affine formation control of networked Euler-Lagrange systems. Journal of the Franklin Institute, 2019, 356 (4): 2172- 2197.
doi: 10.1016/j.jfranklin.2018.11.029 |
| 10 |
LI Z K, WEN G H, DUAN Z S, et al Designing fully distributed consensus protocols for linear multi-agent systems with directed graphs. IEEE Trans. on Automatic Control, 2015, 60 (4): 1152- 1157.
doi: 10.1109/TAC.2014.2350391 |
| 11 |
NI J K, SHI P Adaptive neural network fixed-time leader-follower consensus for multi-agent systems with constraints and disturbances. IEEE Trans. on Cybernetics, 2021, 51 (4): 1835- 1848.
doi: 10.1109/TCYB.2020.2967995 |
| 12 |
WANG Q, DONG X W, YU J L, et al Predefined finite-time output containment of nonlinear multi-agent systems with leaders of unknown inputs. IEEE Trans. on Circuits Systems I-Regular Papers, 2021, 68 (8): 3436- 3448.
doi: 10.1109/TCSI.2021.3083612 |
| 13 | WANG X K, LIU Z H, CONG Y R, et al Miniature fixed-wing UAV swarms: review and outlook. Acta Aeronautica et Astronautica Sinica, 2020, 41 (4): 23732. |
| 14 |
LIAN F, TEO R, WANG J L, et al Distributed formation and reconfiguration control of VTOL UAVs. IEEE Trans. on Control Systems Technology, 2017, 25 (1): 270- 277.
doi: 10.1109/TCST.2016.2547952 |
| 15 |
CAI Z H, WANG L H, ZHAO J, et al Virtual target guidance-based distributed model predictive control for formation control of multiple UAVs. Chinese Journal of Aeronautics, 2020, 33 (3): 1037- 1056.
doi: 10.1016/j.cja.2019.07.016 |
| 16 |
ZHAO J, SUN J M, CAI Z H, et al Distributed coordinated control scheme of UAV swarm based on heterogeneous roles. Chinese Journal of Aeronautics, 2022, 35 (1): 81- 97.
doi: 10.1016/j.cja.2021.01.014 |
| 17 | LUO Q N, DUAN H B Distributed UAV flocking control based on homing pigeon hierarchical strategies. Aerospace Science and Technology, 2017, 70, 2570264. |
| 18 |
QIU H X, DUAN H B Multiple UAV distributed close formation control based on in-flight leadership hierarchies of pigeon flocks. Aerospace Science and Technology, 2017, 70, 471- 486.
doi: 10.1016/j.ast.2017.08.030 |
| 19 |
DONG X W, LI Q D, REN Z, et al Formation-containment control for high-order linear time-invariant multi-agent systems with time delays. Journal of the Franklin Institute, 2015, 352 (9): 3564- 3584.
doi: 10.1016/j.jfranklin.2015.05.008 |
| 20 |
LI C J, CHEN L M, GUO Y N, et al Formation-containment control for networked Euler-Lagrange systems with input saturation. Nonlinear Dynamics, 2018, 91 (2): 1307- 1320.
doi: 10.1007/s11071-017-3946-7 |
| 21 |
CHEN L M, LI C J, MEI J, et al Adaptive cooperative formation-containment control for networked Euler-Lagrange systems without using relative velocity information. IET Control Theory and Applications, 2017, 11 (9): 1450- 1458.
doi: 10.1049/iet-cta.2016.1185 |
| 22 |
ZHAI D, AN L W, DONG J X, et al Output feedback adaptive sensor failure compensation for a class of parametric strict feedback systems. Automatica, 2018, 97, 48- 57.
doi: 10.1016/j.automatica.2018.07.014 |
| 23 |
HU Q L, XIAO B, ZHANG Y M Fault-tolerant attitude control for spacecraft under loss of actuator effectiveness. Journal of Guidance, Control, and Dynamics, 2011, 34 (3): 927- 932.
doi: 10.2514/1.49095 |
| 24 |
YU X, LI P, ZHANG Y M The design of fixed-time observer and finite-time fault-tolerant control for hypersonic gliding vehicles. IEEE Trans. on Industrial Electronics, 2018, 65 (5): 4135- 4144.
doi: 10.1109/TIE.2017.2772192 |
| 25 |
MA H, LIANG H J, ZHOU Q, et al Adaptive dynamic surface control design for uncertain nonlinear strict-feedback systems with unknown control direction and disturbances. IEEE Trans. on System, Man and Cybernetics System, 2019, 49 (3): 506- 515.
doi: 10.1109/TSMC.2018.2855170 |
| 26 |
CUI Y W, LI A J, MENG X F A fault-tolerant control method for distributed flight control system facing wing damage. Journal of Systems Engineering and Electronics, 2021, 32 (5): 1041- 1052.
doi: 10.23919/JSEE.2021.000089 |
| 27 |
PAN C W, LIU X, CHEN Y, et al Finite-time fault-tolerant control of teleoperating cyber physical system against faults. Journal of Systems Engineering and Electronics, 2023, 34 (2): 469- 478.
doi: 10.23919/JSEE.2023.000044 |
| 28 |
MALIKA S, WANG F Y, LIU Z X, et al Distributed fuzzy fault-tolerant consensus of leader-follower multi-agent systems with mismatched uncertainties. Journal of Systems Engineering and Electronics, 2021, 32 (5): 1031- 1040.
doi: 10.23919/JSEE.2021.000088 |
| 29 |
MAZARE M, TAGHIZADEH M, GHAF-GHANBARI P Pitch actuator fault-tolerant control of wind turbines based on time delay control and disturbance observer. Ocean Engineering, 2021, 238, 109724.
doi: 10.1016/j.oceaneng.2021.109724 |
| 30 |
MAZARE M, TAGHIZADEH M Uncertainty estimator-based dual layer adaptive fault-tolerant control for wind turbines. Renewable Energy, 2022, 188, 545- 560.
doi: 10.1016/j.renene.2022.02.030 |
| 31 |
YU Z Q, ZHANG Y M, JIANG B, et al A review on fault-tolerant cooperative control of multiple unmanned aerial vehicles. Chinese Journal of Aeronautics, 2022, 35 (1): 1- 18.
doi: 10.1016/j.cja.2021.04.022 |
| 32 |
LIU C, JIANG B, PATTON R J, et al Integrated fault-tolerant control for close formation flight. IEEE Trans. on Aerospace Electronics and System, 2020, 56 (2): 839- 852.
doi: 10.1109/TAES.2019.2920221 |
| 33 | KAMEL M A, GHAMRY K A, ZHANG Y M Real-time fault-tolerant cooperative control of multiple UAVs-UGVs in the presence of actuator faults. Journal of Intelligent & Robotic Systems, 2017, 88 (2/4): 469- 480. |
| 34 |
YANG H L, JIANG B, YANG H, et al Synchronization of multiple 3-DOF helicopters under actuator faults and saturations with prescribed performance. ISA Transactions, 2018, 75, 118- 126.
doi: 10.1016/j.isatra.2018.02.009 |
| 35 |
YU Z Q, ZHANG Y M, JIANG B, et al Decentralized fractional-order backstepping fault-tolerant control of multi-UAVs against actuator faults and wind effects. Aerospace Science and Technology, 2020, 104, 105939.
doi: 10.1016/j.ast.2020.105939 |
| 36 |
YU Z Q, ZHANG Y M, JIANG B, et al Fractional-order adaptive fault-tolerant synchronization tracking control of networked fixed-wing UAVs against actuator-sensor faults via intelligent learning mechanism. IEEE Trans. on Neural Networks and Learning Systems, 2021, 32 (12): 5539- 5553.
doi: 10.1109/TNNLS.2021.3059933 |
| 37 |
YU Z Q, ZHANG Y M, JIANG B, et al Distributed adaptive fault-tolerant close formation flight control of multiple trailing fixed-wing UAVs. ISA Transactions, 2020, 106, 181- 199.
doi: 10.1016/j.isatra.2020.07.005 |
| 38 |
YU Z Q, LIU Z X, ZHANG Y M, et al Distributed finite-time fault-tolerant containment control for multiple unmanned aerial vehicles. IEEE Trans. on Neural Networks and Learning Systems, 2020, 31 (6): 2077- 2091.
doi: 10.1109/TNNLS.2019.2927887 |
| 39 |
XIANG X B, LIU C, SU H S, et al On decentralized adaptive full-order sliding mode control of multiple UAVs. ISA Transactions, 2017, 71, 196- 205.
doi: 10.1016/j.isatra.2017.09.008 |
| 40 |
LI D Y, ZHANG W, HE W, et al Two-layer distributed formation-containment control of multiple Euler-Lagrange systems by output feedback. IEEE Trans. on Cybernetics, 2019, 49 (2): 675- 687.
doi: 10.1109/TCYB.2017.2786318 |
| 41 |
YU D, GE S S, LI D Y, et al Finite-horizon robust formation-containment control of multi-agent networks with unknown dynamics. Neurocomputing, 2021, 458, 403- 415.
doi: 10.1016/j.neucom.2021.01.063 |
| 42 | ZHENG W M, XU Y, LUO D L. Distributed hierarchical formation-containment control of multi quadrotors system. Journal of Beijing University of Aeronautics and Astronautics,2022. DOI: 10.13700/j.bh.1001-5965.2022.0506. (in Chinese) |
| 43 |
LEVANT A Higher-order sliding modes differentiation and output-feedback control. International Journal of Control, 2003, 76 (9/10): 924- 941.
doi: 10.1080/0020717031000099029 |
| 44 |
NAGESH I, EDWARDS C A multivariable super-twisting sliding mode approach. Automatica, 2014, 50 (3): 984- 988.
doi: 10.1016/j.automatica.2013.12.032 |
| 45 | ANDERSON J D. Fundamentals of aerodynamics, McGraw-Hill series in aeronautical and aerospace engineering. 6th ed. New York: McGraw-Hill Education, 2017. |
| 46 | AC 120-28D. Criteria for approval of category Ⅲ weather minima for takeoff, landing, and rollout. Washington: U. S. Department of Transportation and Federal Aviation Administration, 1999. |
| 47 |
BOSKOVIC J D, BERGSTROM S E, MEHRA R K Robust integrated flight control design under failures, damage, and state-dependent disturbances. Journal of Guidance, Control, and Dynamics, 2005, 28 (5): 902- 917.
doi: 10.2514/1.11272 |
| 48 |
ZHANG L L, YANG G H Observer-based fuzzy adaptive sensor fault compensation for uncertain nonlinear strict-feedback systems. IEEE Trans. on Fuzzy Systems, 2018, 26 (4): 2301- 2310.
doi: 10.1109/TFUZZ.2017.2772879 |
| 49 |
XU B Robust adaptive neural control of flexible hypersonic flight vehicle with dead-zone input nonlinearity. Nonlinear Dynamics, 2015, 80 (3): 1509- 1520.
doi: 10.1007/s11071-015-1958-8 |
| 50 |
XU Y, LUO D L, LI D Y, et al Affine formation control for heterogeneous multi-agent systems with directed interaction networks. Neurocomputing, 2019, 330, 104- 115.
doi: 10.1016/j.neucom.2018.11.023 |
| 51 |
LI W Q, XIE L H, ZHANG J F Containment control of leader-following multi-agent systems with Markovian switching network topologies and measurement noises. Automatica, 2015, 51, 263- 267.
doi: 10.1016/j.automatica.2014.10.070 |
| 52 |
MENG Z Y, REN W, YOU Z Distributed finite-time attitude containment control for multiple rigid bodies. Automatica, 2010, 46 (12): 2092- 2099.
doi: 10.1016/j.automatica.2010.09.005 |
| 53 |
BHAT S P, BERNSTEIN D S Finite-time stability of continuous autonomous systems. SIAM Journal on Control Optimization, 2000, 38 (3): 751- 766.
doi: 10.1137/S0363012997321358 |
| 54 |
SUN C, HU G Q, XIE L H, et al Robust finite-time connectivity preserving coordination of second-order multi-agent systems. Automatica, 2018, 89, 21- 27.
doi: 10.1016/j.automatica.2017.11.020 |
| 55 |
ZHANG W Q, DONG C Y, RAN M P, et al Fully distributed time-varying formation tracking control for multiple quadrotor vehicles via finite-time convergent extended state observer. Chinese Journal of Aeronautics, 2020, 33 (11): 2907- 2920.
doi: 10.1016/j.cja.2020.03.004 |
| 56 |
HAN J Q From PID to active disturbance rejection control. IEEE Trans. on Industrial and Electronics, 2009, 56 (3): 900- 906.
doi: 10.1109/TIE.2008.2011621 |
| 57 | K HASSAN K. Nonlinear systems. 3rd ed. New Jersey: Prentice Hall, 2002. |
| No related articles found! |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||