
Journal of Systems Engineering and Electronics ›› 2024, Vol. 35 ›› Issue (2): 451-462.doi: 10.23919/JSEE.2024.000008
• CONTROL THEORY AND APPLICATION • Previous Articles
Yuqi YUAN1( ), Di ZHOU1,*(), Junlong LI2(), Chaofei LOU2
), Di ZHOU1,*(), Junlong LI2(), Chaofei LOU2
Received:2022-08-24
Online:2024-04-18
Published:2024-04-18
Contact:
Di ZHOU
E-mail:994631152@qq.com;zhoud@hit.edu.cn;hit_szL@163.com
About author:Yuqi YUAN, Di ZHOU, Junlong LI, Chaofei LOU. Time-varying parameters estimation with adaptive neural network EKF for missile-dual control system[J]. Journal of Systems Engineering and Electronics, 2024, 35(2): 451-462.
Add to citation manager EndNote|Reference Manager|ProCite|BibTeX|RefWorks
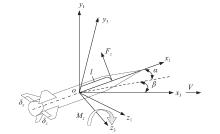
Fig 1
Velocity coordinate system and body coordinate system"
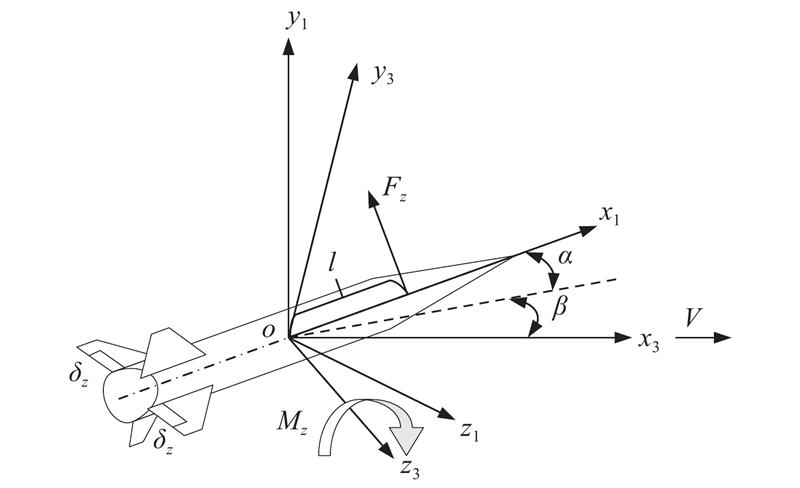
Fig 2
LSTM neural network structure"
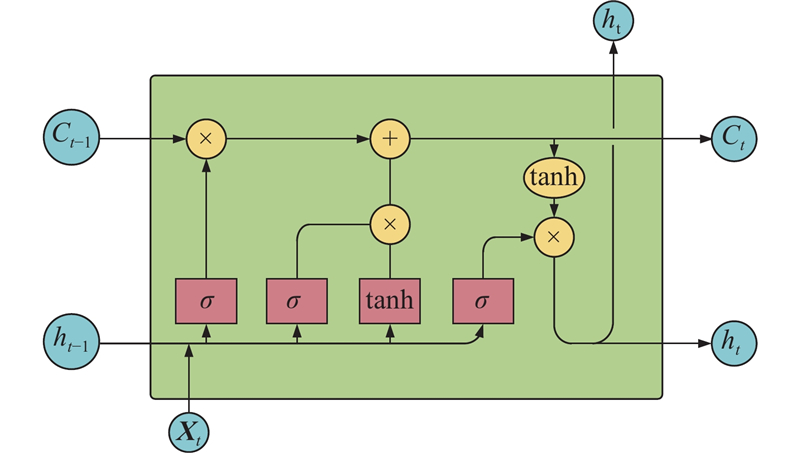

Fig 3
LSTM-EKF algorithm structure"
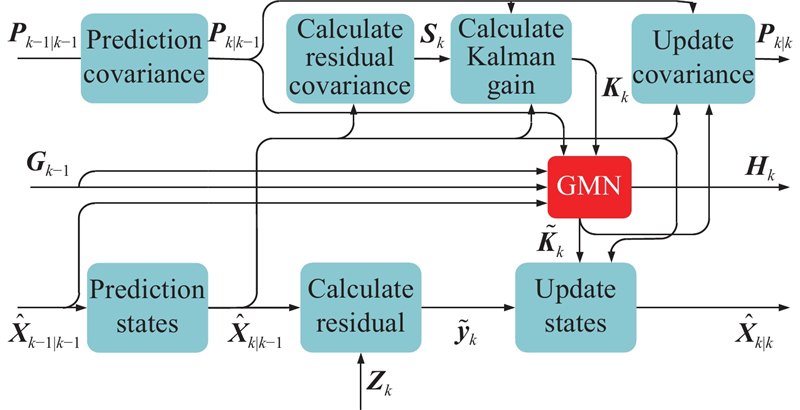
Fig 4
Roll training method"
Fig 5
Variation of angle of attack"
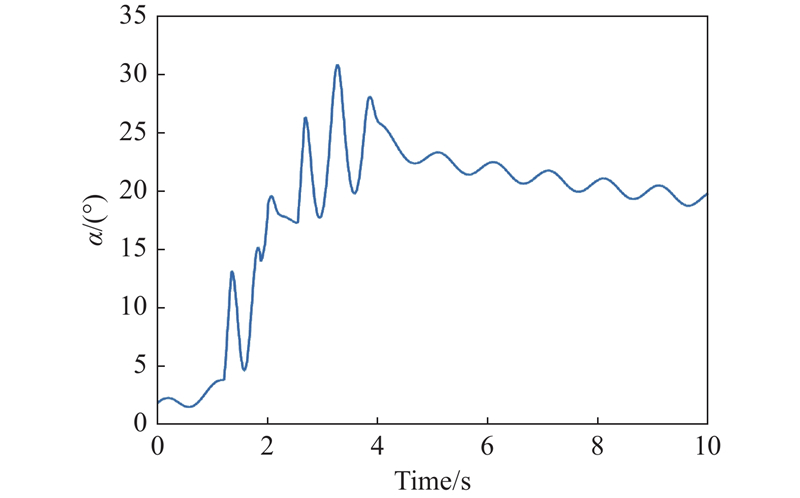
Fig 6
Pulse engine ignition curve"
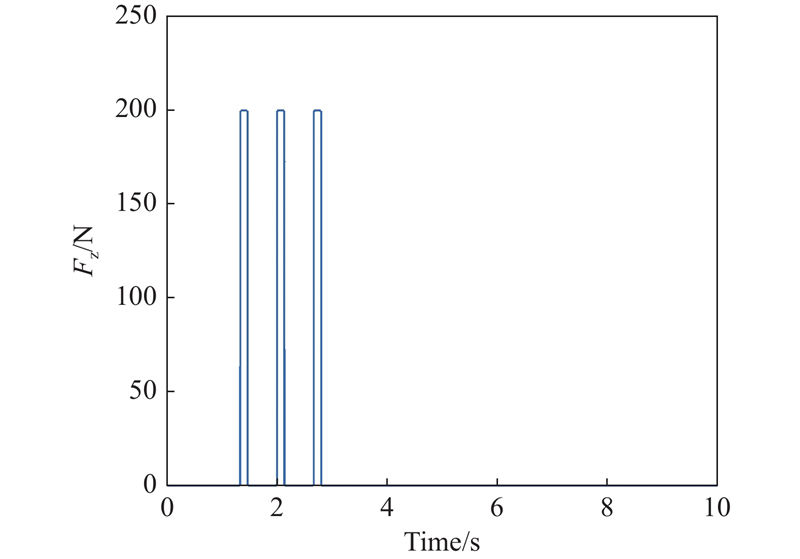
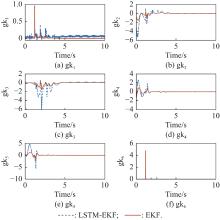
Fig 7
Kalman gain of EKF and LSTM-EKF"
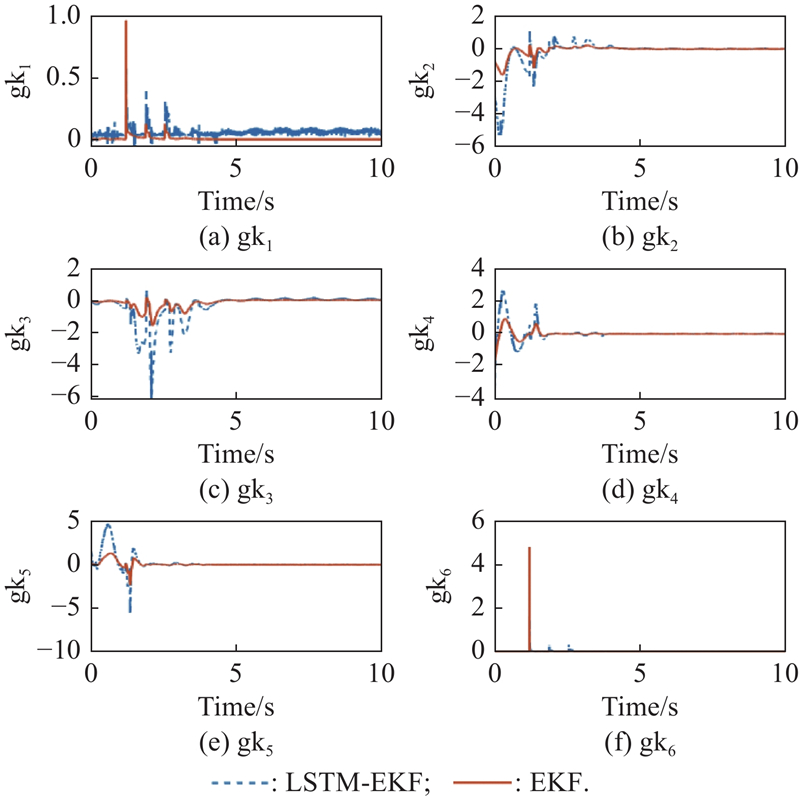
Fig 8
Estimation of pitch angular rate"
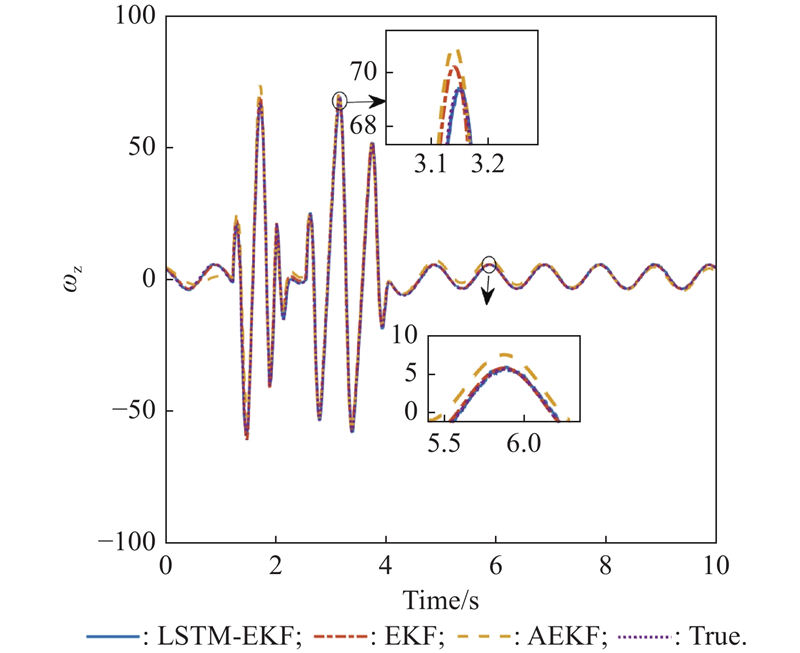
Fig 9
Estimation of ${{\boldsymbol{a}}_{{\boldsymbol{20}}}}$"
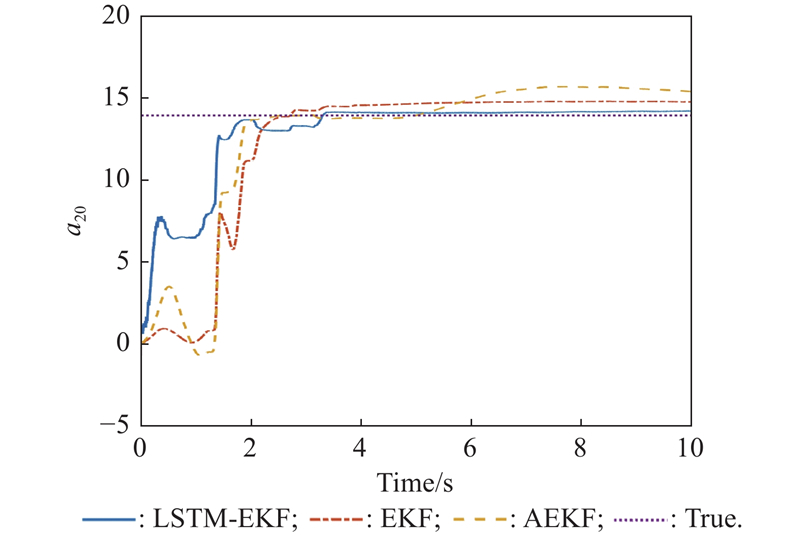
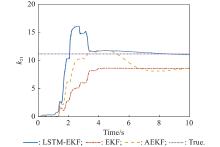
Fig 10
Estimation of ${{\boldsymbol{k}}_{{\boldsymbol{21}}}}$"
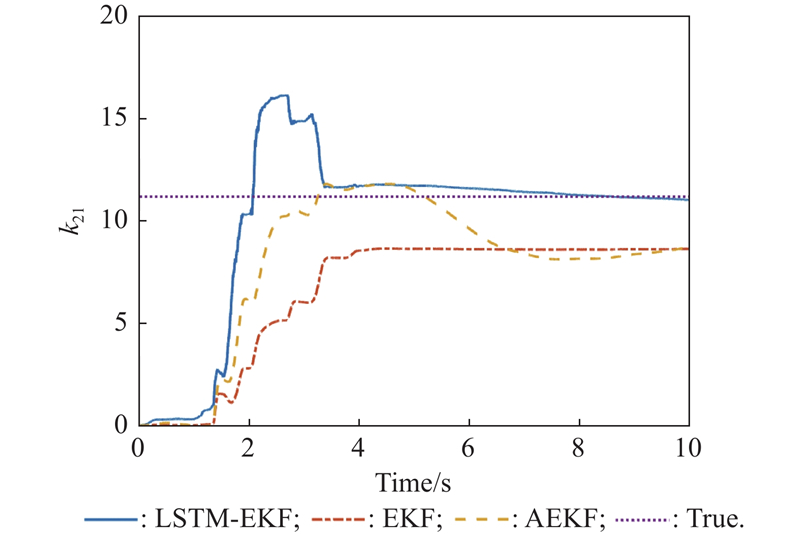
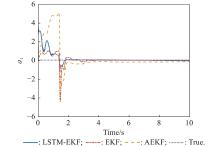
Fig 11
Estimation of ${{\boldsymbol{a}}_{\boldsymbol{1}}}$"
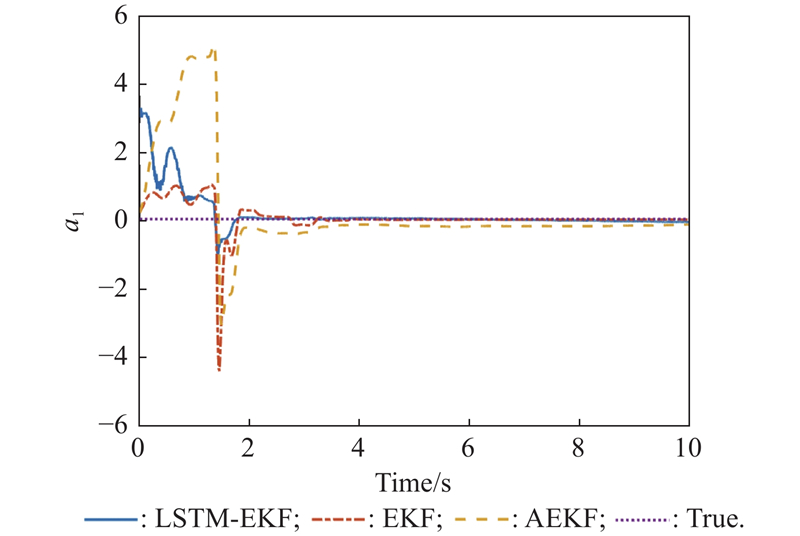
Fig 12
Estimation of ${{\boldsymbol{a}}_{\boldsymbol{3}}}$"
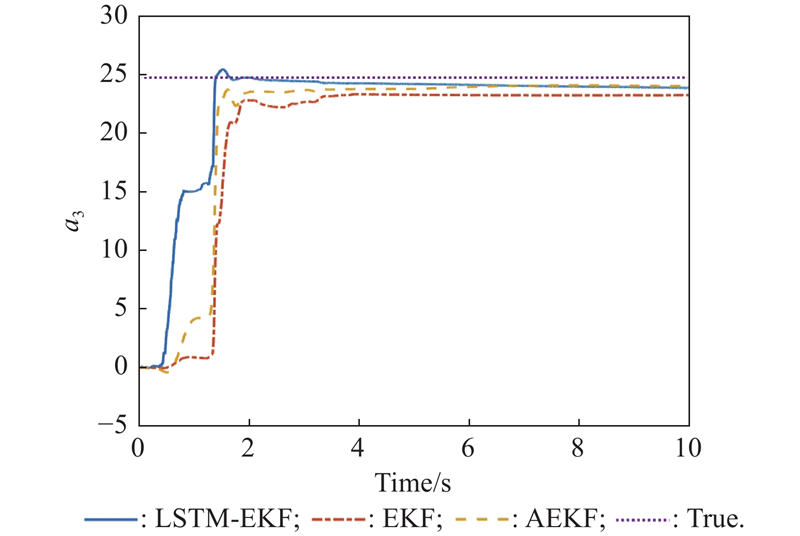
Fig 13
Estimation of ${{\boldsymbol{l}}_{\boldsymbol{z}}}$"
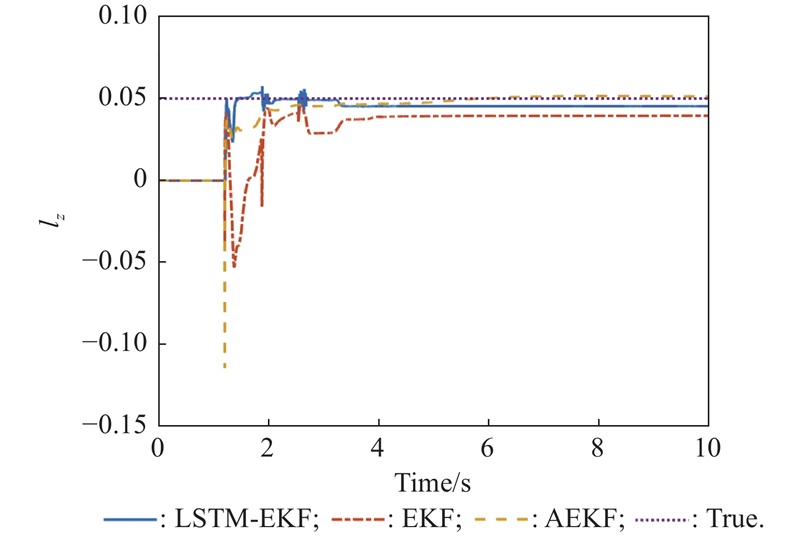
Fig 14
Estimation of ${{\boldsymbol{a}}_{\boldsymbol{2}}}$"
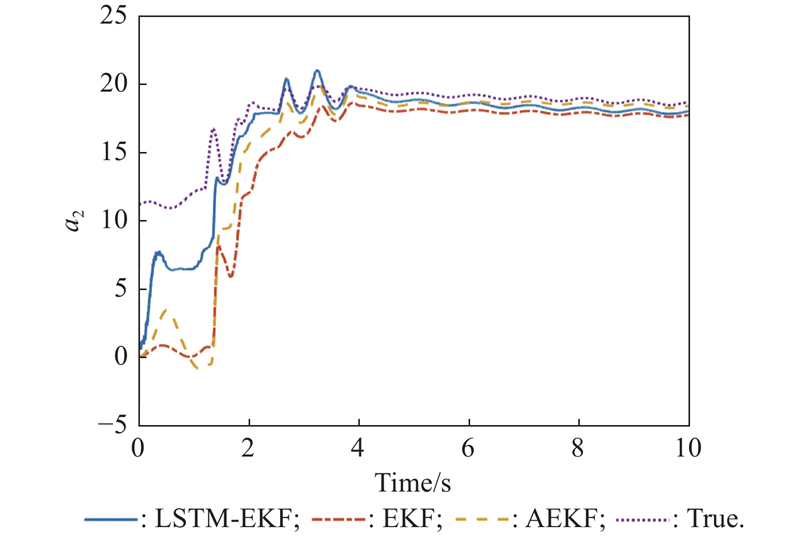

Fig 15
Variation of correction factor $\varepsilon $"
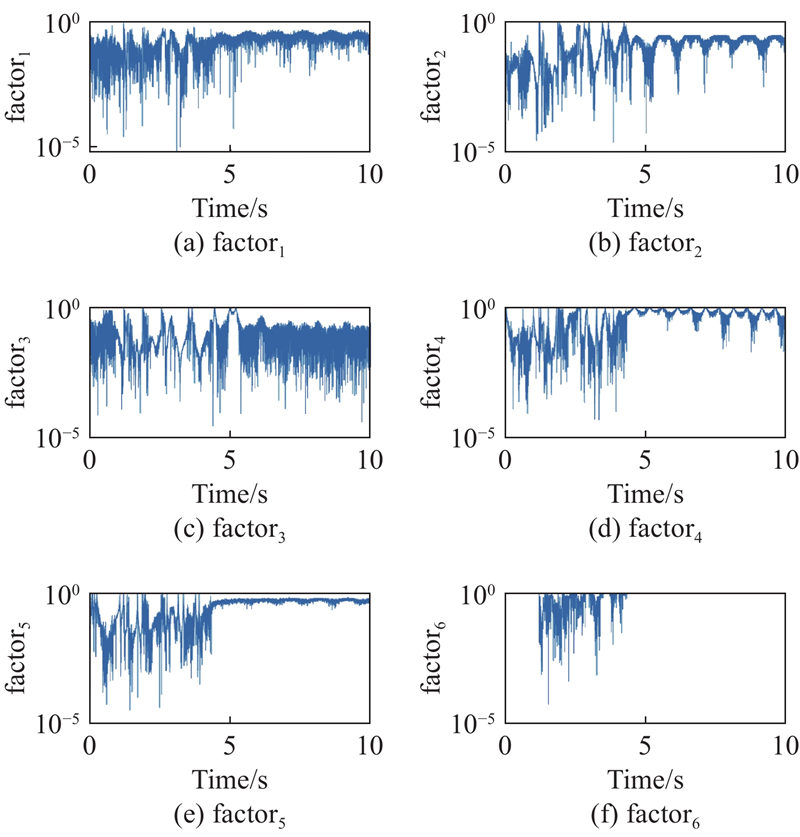
Fig 16
Training performance of each sliding windows"
| 1 | RICCO R A, TEIXEIRA B. Least−squares parameter estimation for state−space models with state equality constraints. International Journal of Systems Science, 2021, 53(1): 1−13. |
| 2 | LU X J. Online identification of aircraft parameters using state-space model. Changsha: National University of Defense Technology, 2016. (in Chinese) |
| 3 | ZHOU S. Operational identification of time-varying model parameters for thermal structures of high-speed aerial vehicles. Acta Aeronautica ET Astronautica Sinica, 2015, 36(1): 373−380. |
| 4 |
ARULAMPALAM M S, MASKELL S, GORDON N, et al A tutorial on particle filters for online nonlinear/non-Gaussian Bayesian tracking. IEEE Trans. on Signal Processing, 2002, 50 (2): 174- 188.
doi: 10.1109/78.978374 |
| 5 | JULIER S J, UHLMANN J K. Unscented filtering and nonlinear estimation. Proceedings of the IEEE, 2004, 92 (3): 401- 422. |
| 6 |
ARASARATNAM I, HAYKIN S Cubature Kalman filters. IEEE Trans. on Automatic Control, 2009, 54 (6): 1254- 1269.
doi: 10.1109/TAC.2009.2019800 |
| 7 | JETTO L, LONGHI S, VENTURINI G. Development and experimental validation of an adaptive extended Kalman filter for the localization of mobile robots. IEEE Trans. on Robotics and Automation. 1999, 15(2): 219−229. |
| 8 | ROBLES J J, CARDENAS−MANSILLA G, LEHNERT R. Adaptive selection of anchors in the extended Kalman filter tracking algorithm. Proc. of the IEEE 11th Workshop on Positioning Navigation and Communication, 2014. DOI: 10.1109/WPNC.2014.6843294. |
| 9 | CHEN X. An identification method of fast time-varying parameters adapted to aircraft control systems. Acta Aeronautica ET Astronautica Sinica, 1990, 11(9): 474−479. |
| 10 |
SUN Y, LIU Y Adaptive synchronization control and parameters identification for chaotic fractional neural networks with time-varying delays. Neural Processing Letters, 2021, 53 (4): 2729- 2745.
doi: 10.1007/s11063-021-10517-7 |
| 11 |
WANG S, ZHAO X, YU Q, et al Identification of driver braking intention based on long short-term memory (LSTM) network. IEEE Access, 2020, 8, 180422- 180432.
doi: 10.1109/ACCESS.2020.3027811 |
| 12 | HERMANS M, SCHRAUWEN B Training and analyzing deep recurrent neural networks. Advances in Neural Information Processing Systems, 2013, 2013, (1): 190- 198. |
| 13 |
BENGIO Y, SIMARD P Learning long-term dependencies with gradient descent is difficult. IEEE Trans. on Neural Networks, 1994, 5 (2): 157- 166.
doi: 10.1109/72.279181 |
| 14 | LO J T, BASSU D. Adaptive multilayer perceptrons with long-and short-term memories. IEEE Trans. on Neural Networks, 2002, 13(1): 22−33. |
| 15 | YU Y, SI X S, HU C H, et al. A review of recurrent neural networks: LSTM cells and network architectures. Neural Computation, 2019, 31(7): 1235−1270. |
| 16 | HOCHREITER S, SCHMIDHUBER J. Long short-term memory. Neural Computation, 1997, 9(8): 1735−1780. |
| 17 | XING Y, LYU C. Dynamic state estimation for the advanced brake system of electric vehicles by using deep recurrent neural networks. IEEE Trans. on Industrial Electronics, 2020, 67(11): 9536−9547. |
| 18 | ZHOU Z Y, ZHANG R X, ZHU Z F. Robust Kalman filtering with long short-term memory for image-based visual servo control. Multimedia Tools and Applications, 2019, 78(18): 26341−26371. |
| 19 | MA C Y, WANG A N, CHEN G, et al. Hand joints-based gesture recognition for noisy dataset using nested interval unscented Kalman filter with LSTM network. The Visual Computer, 2018, 34(6/8): 1053−1063. |
| 20 | ZHENG T Y, YAO Y, HE F H. An RNN-based learnable extended Kalman filter design and application. Proc. of the IEEE 18th European Control Conference, 2019. DOI: 10.23919/ECC.2019.8796088. |
| 21 |
BAO T Z, ZHAO Y H A deep Kalman filter network for hand kinematics estimation using sEMG. Pattern Recognition Letters, 2021, 143, 88- 94.
doi: 10.1016/j.patrec.2021.01.001 |
| 22 | NI Z C, YANG Y, XIU X. Battery state of charge estimation using long short-term memory network and extended Kalman filter. Proc. of the IEEE 39th Chinese Control Conference, 2020. DOI: 10.23919/CCC50068. |
| 23 | HONG J, WANG Z, CHEN W, et al. Synchronous multi-parameter prediction of battery systems on electric vehicles using long short-term memory networks. Applied Energy, 2019, 254: 113648. |
| 24 | ZMITRI M, FOURATI H, PRIEUR C. Inertial velocity estimation for indoor navigation through magnetic gradient-based EKF and LSTM learning model. Proc. of the IEEE/RSJ International Conference on Intelligent Robots and Systems, 2020. DOI: 10.1109/IROS45743. |
| 25 |
NI Y, XIA Z L, ZHAO F T An online multistep-forward voltage-prediction approach based on an LSTM-TD model and KF algorithm. Computer, 2021, 54 (8): 56- 65.
doi: 10.1109/MC.2021.3070314 |
| 26 |
ZHU X L, HAO K R, XIE R M, et al Soft sensor based on extreme gradient boosting and bidirectional converted gates long short-term memory self-attention network. Neurocomputing, 2021, 434, 126- 136.
doi: 10.1016/j.neucom.2020.12.028 |
| 27 | MENG Y, LIU L A deep learning approach for a source code detection model using self-attention. Complexity, 2020, 2020, 5027198. |
| 28 | BABAK A, ALIREZA G B, HAMID K, et al. A novel attention-based LSTM cell post-processor coupled with Bayesian optimization for streamow prediction. Journal of Hydrology, 2021, 601: 126526. |
| 29 | SAGE A P, HUSA G W. Algorithms for sequential adaptive estimation of prior statistics. Proc. of the IEEE 8th Symposium on Adaptive Processes Decision and Control, 1969. DOI: 10.1109/SAP.1969.269927. |
| 30 | CHEN Z, SHU X, LI G, et al Stage of charge estimation of lithium-ion battery packs based on improved cubature Kalman filter with long short-term memory model. IEEE Trans. on Transportation Electrification, 2020, 73 (3): 1271- 1284. |
| 31 | RIDGELY D B, DRAKE D, TRIPLETT L. Dynamic control allocation of a missile with tails and reaction jets. Proc. of the AIAA Guidance, Navigation and Control Conference and Exhibit, 2007. DOI: 10.2514/6.2007-6671. |
| [1] | Muhammad WASIM, Ahsan ALI, Mohammad Ahmad CHOUDHRY, Inam Ul Hasan SHAIKH, Faisal SALEEM. Robust design of sliding mode control for airship trajectory tracking with uncertainty and disturbance estimation [J]. Journal of Systems Engineering and Electronics, 2024, 35(1): 242-258. |
| [2] | Mahmoudreza HADAEGH, Hamid KHALOOZADEH. Modified switched IMM estimator based on autoregressive extended Viterbi method for maneuvering target tracking [J]. Journal of Systems Engineering and Electronics, 2018, 29(6): 1142-1157. |
| [3] | Halil Ersin S¨oken and Chingiz Hajiyev. REKF and RUKF for pico satellite attitude estimation in the presence of measurement faults [J]. Journal of Systems Engineering and Electronics, 2014, 25(2): 288-297. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||