
Journal of Systems Engineering and Electronics ›› 2024, Vol. 35 ›› Issue (1): 242-258.doi: 10.23919/JSEE.2024.000017
• CONTROL THEORY AND APPLICATION • Previous Articles
Muhammad WASIM1,*( ), Ahsan ALI2(), Mohammad Ahmad CHOUDHRY2(), Inam Ul Hasan SHAIKH1(), Faisal SALEEM3,4()
), Ahsan ALI2(), Mohammad Ahmad CHOUDHRY2(), Inam Ul Hasan SHAIKH1(), Faisal SALEEM3,4()
Received:2021-12-28
Online:2024-02-18
Published:2024-03-05
Contact:
Muhammad WASIM
E-mail:muhammad077wasim@gmail.com;ahsan.ali@uettaxila.edu.pk;dr.ahmad@uettaxila.edu.pk;inam.hassan@uettaxila.edu.pk;faisal.saleem@polsl.pl
About author:Muhammad WASIM, Ahsan ALI, Mohammad Ahmad CHOUDHRY, Inam Ul Hasan SHAIKH, Faisal SALEEM. Robust design of sliding mode control for airship trajectory tracking with uncertainty and disturbance estimation[J]. Journal of Systems Engineering and Electronics, 2024, 35(1): 242-258.
Add to citation manager EndNote|Reference Manager|ProCite|BibTeX|RefWorks
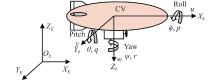
Fig 1
Coordinate system of an airship"
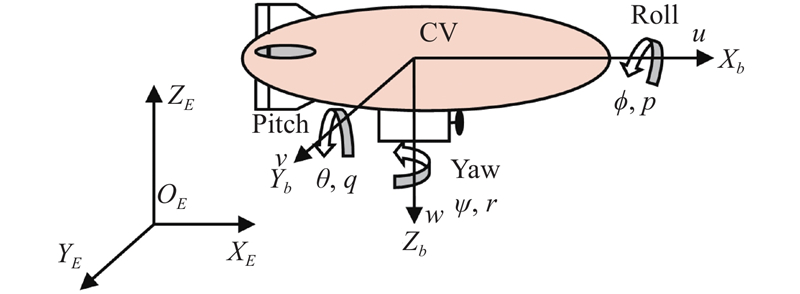
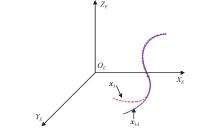
Fig 2
Visual representation of a typical trajectory tracking problem"
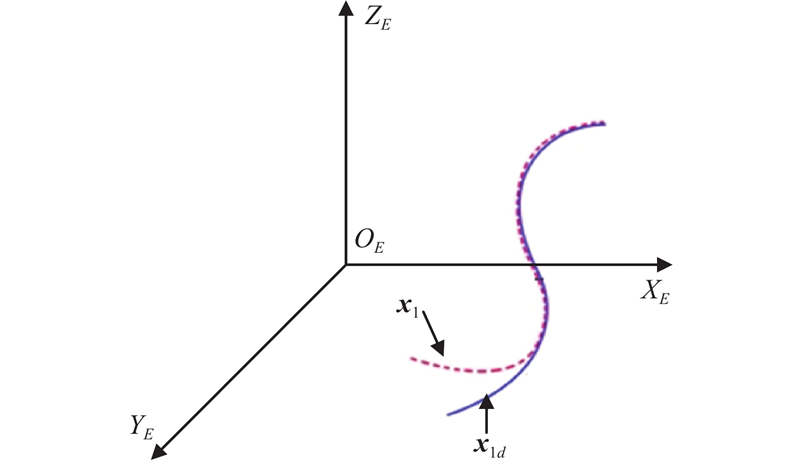
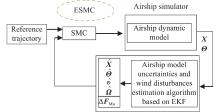
Fig 3
Block diagram representation of proposed ESMC algorithm"
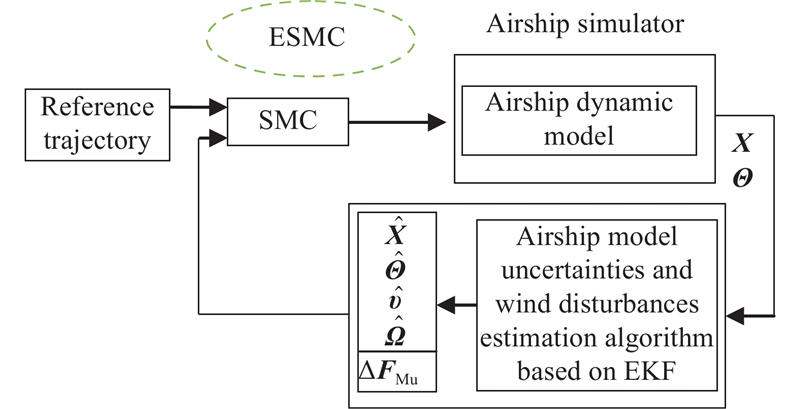

Fig 4
Flow chart for the proposed airship trajectory tracking control algorithm"
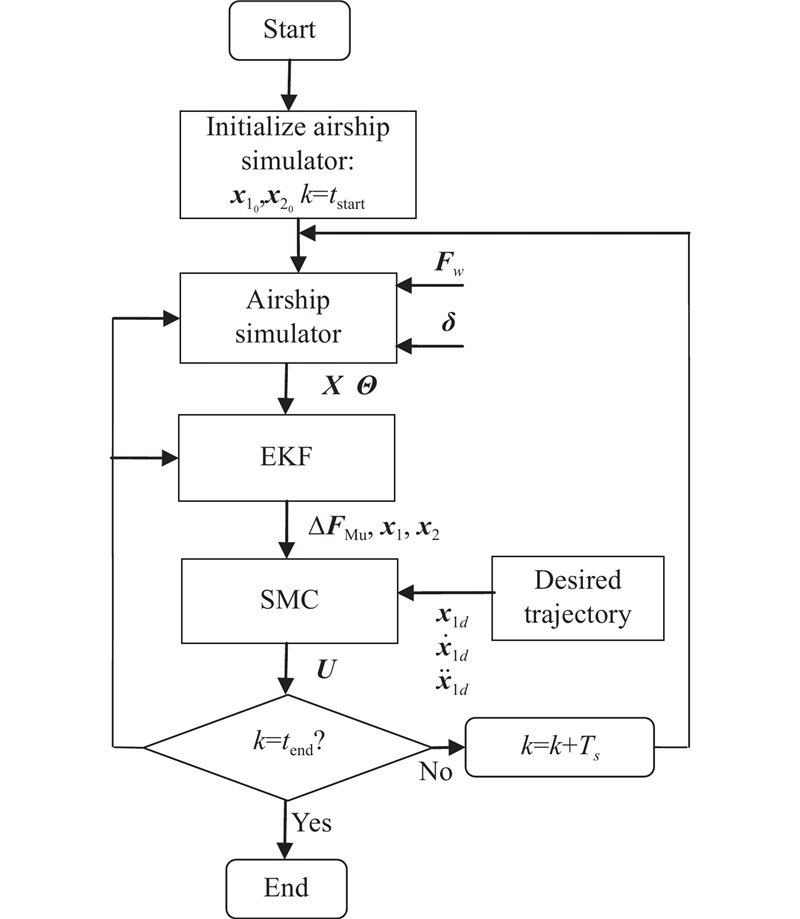
Table 1
Initial conditions for airship simulator"
| State | Symbol | Value |
| Position/m | ||
| Attitude/rad | ||
| Linear velocity/ms−1 | ||
| Angular velocity/rads−1 |

Fig 5
Flow chart for the EKF algorithm"
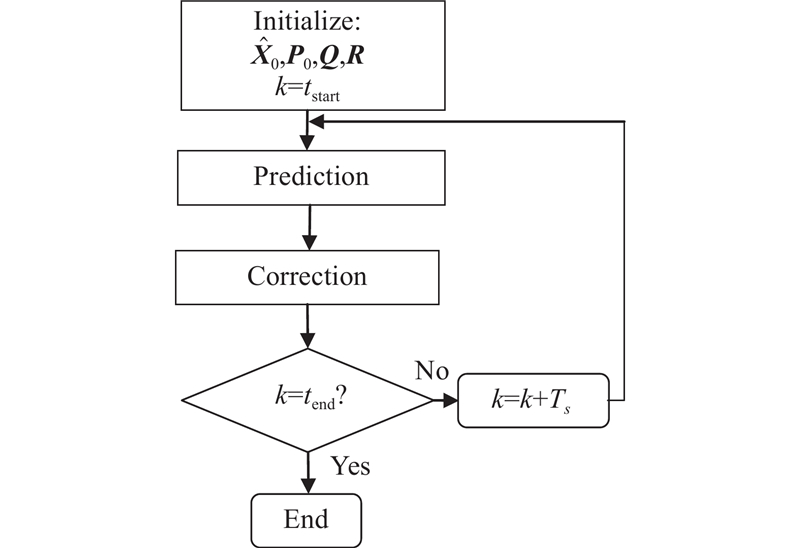
Table 2
Initial conditions for EKF"
| State | Symbol | Value |
| Position/m | ||
| Attitude/rad | ||
| Linear velocity/ms−1 | ||
| Angular velocity/rads−1 | ||
| Uncertainty vector |
Table 3
Initial conditions for EKF"
| EKF parameter | Symbol | Value |
| Process noise covariance | Q | |
| Measurement noise covariance | R | |
| State error covariance |
Table 4
Sliding mode controller gains"
| Controller parameter | Value |
Table 5
EKF based sliding mode controller gains"
| Controller parameter | Value |
Fig 6
Trajectory tracking performance of controllers"
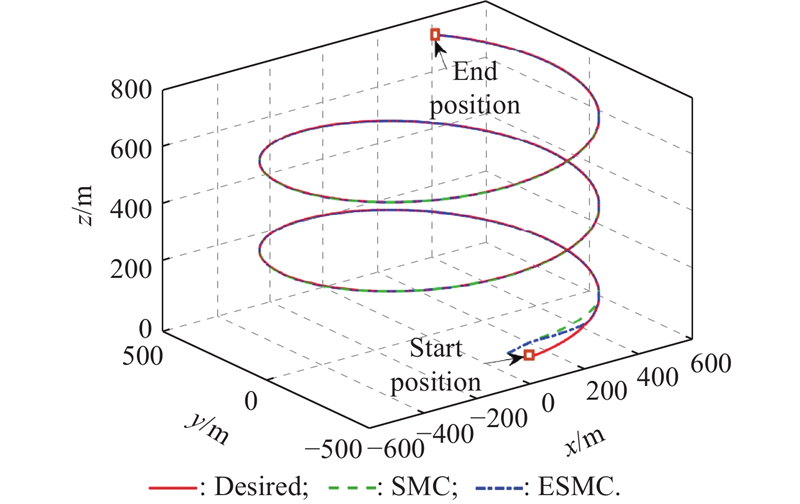

Fig 7
Trajectory tracking error"
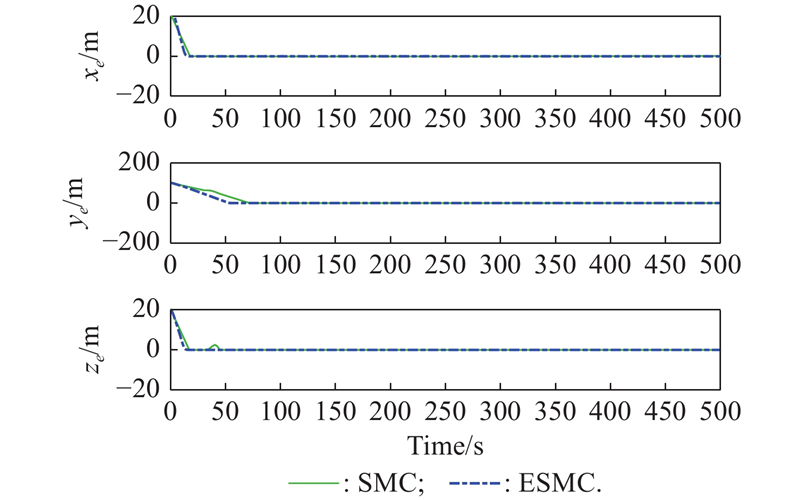

Fig 8
Control effort"
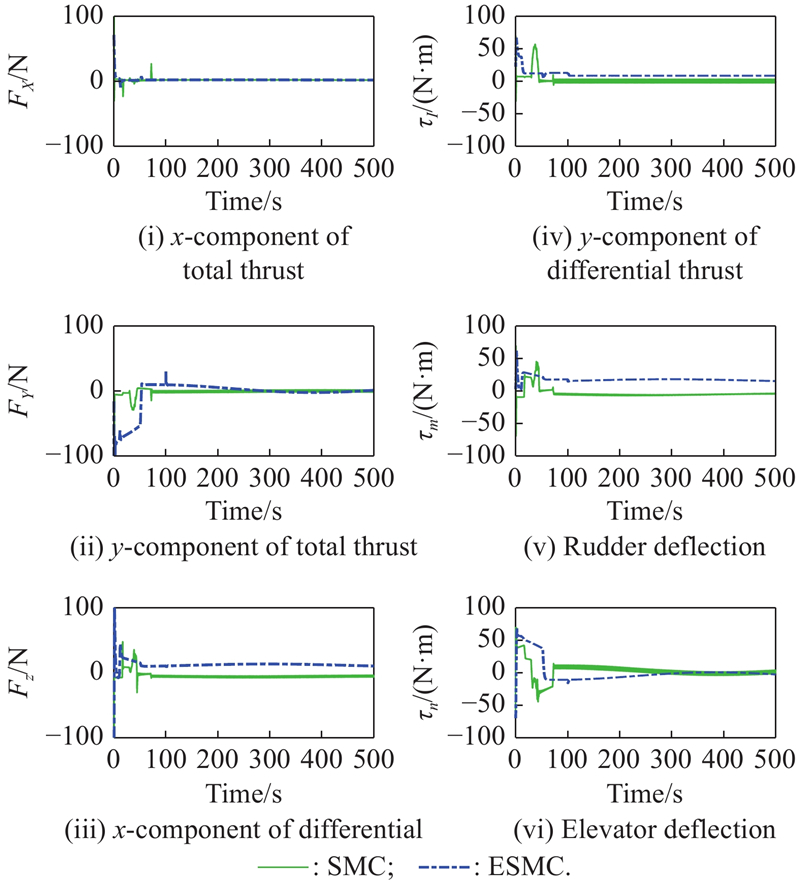
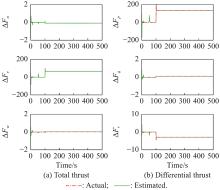
Fig 9
Estimation of model uncertainties due to mass matrix parameter variations"
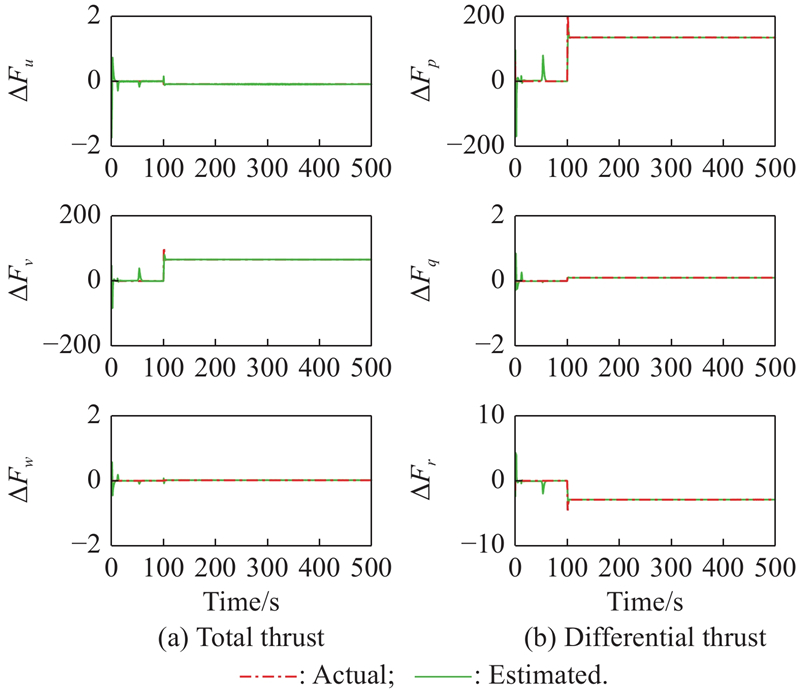

Fig 10
Trajectory tracking performance of controllers"
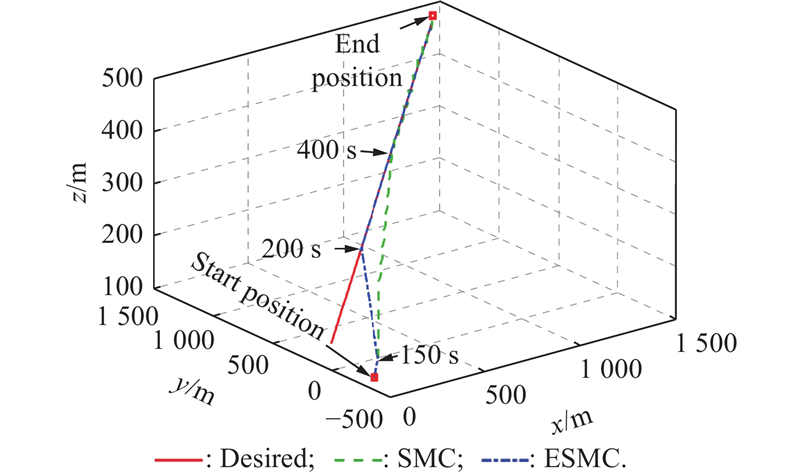

Fig 11
Trajectory tracking error"
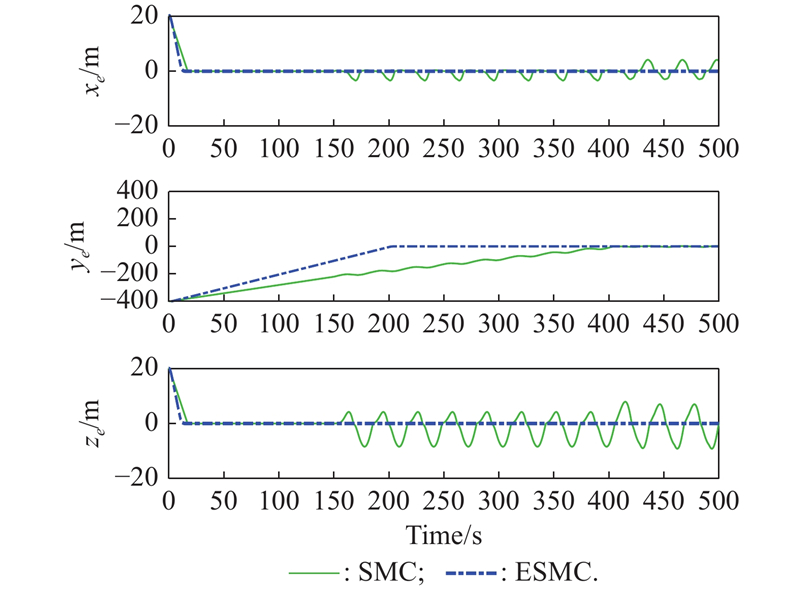
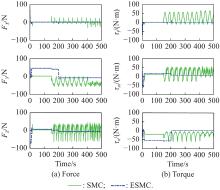
Fig 12
Control effort"
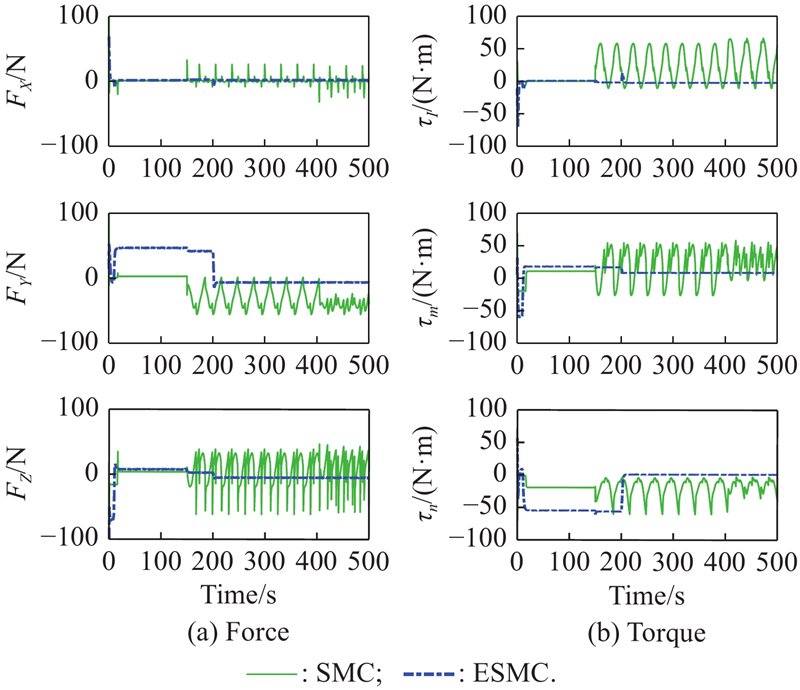

Fig 13
Estimation of model uncertainties due to the change in aerodynamic model parameters"
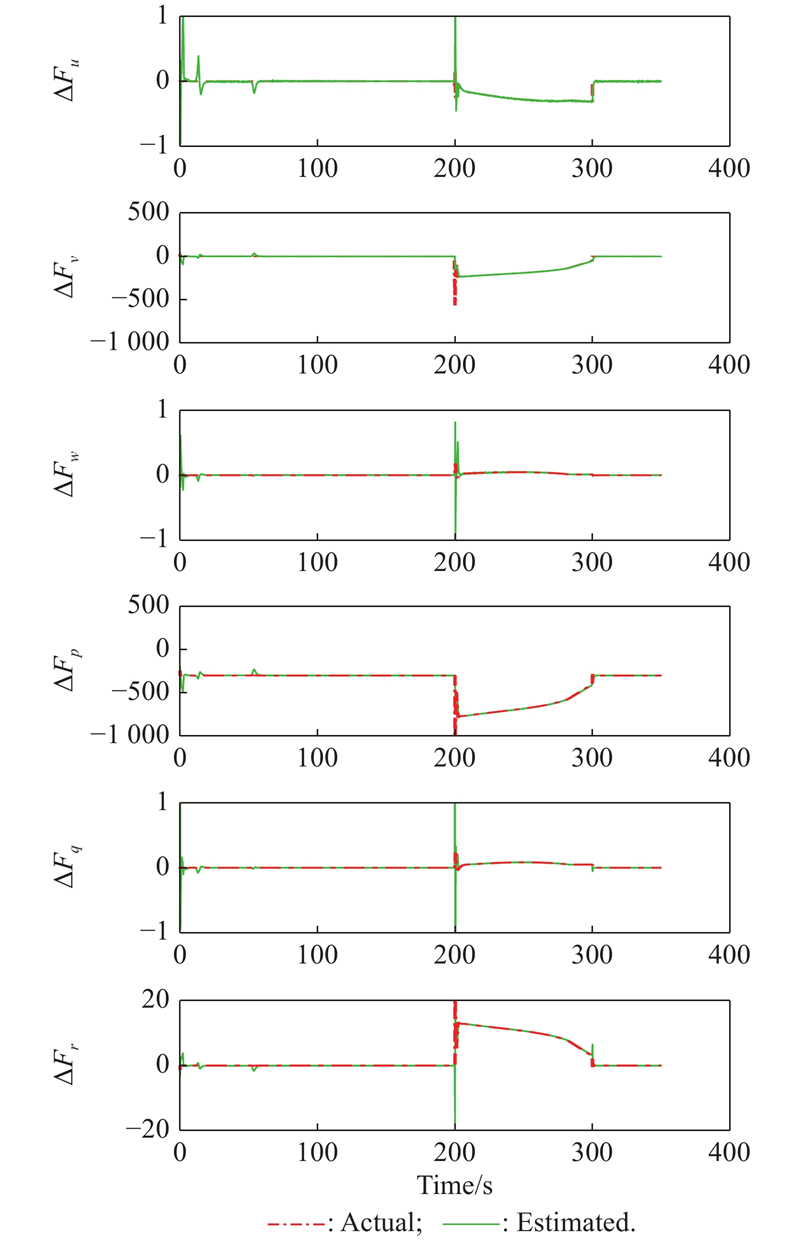
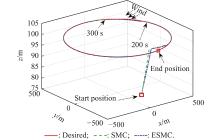
Fig 14
Trajectory tracking performance of controllers"
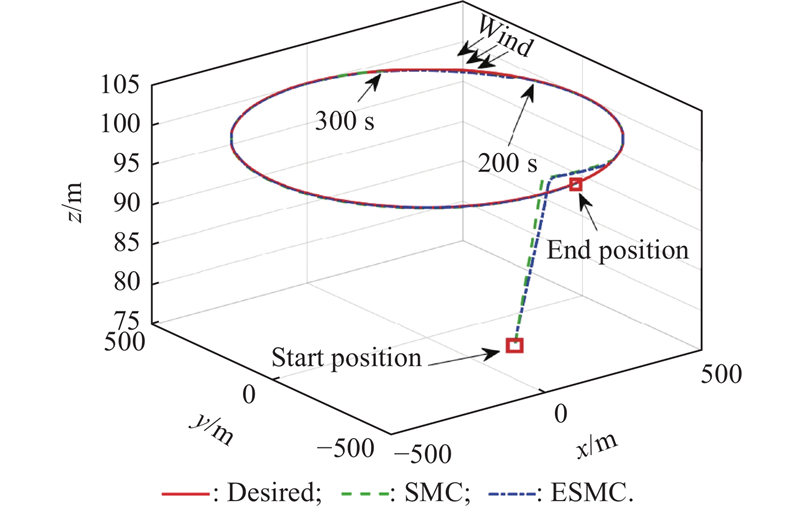
Fig 15
Trajectory tracking error"
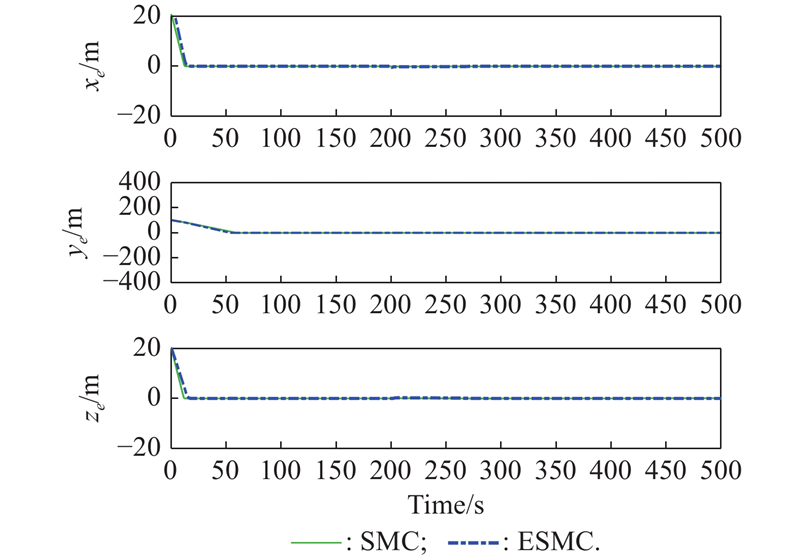

Fig 16
Control effort"
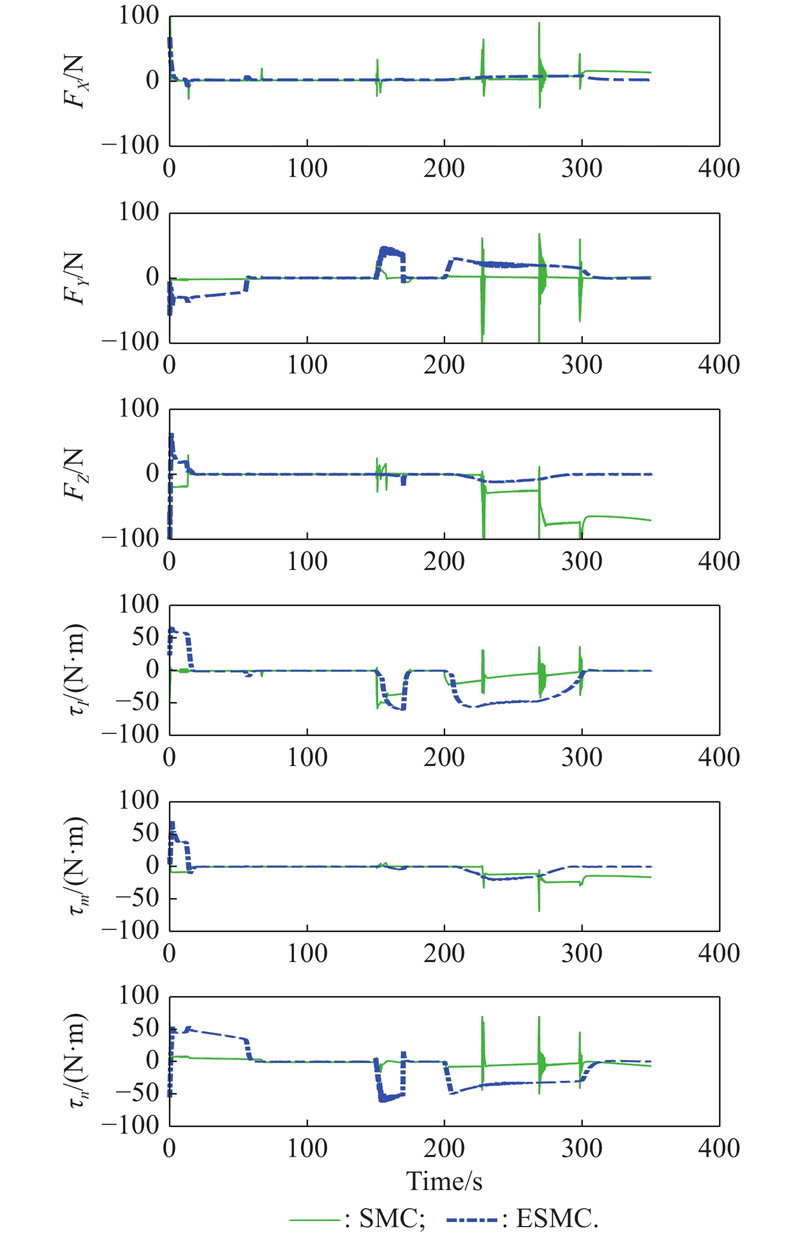
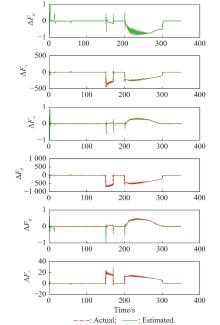
Fig 17
Estimation of wind disturbances"
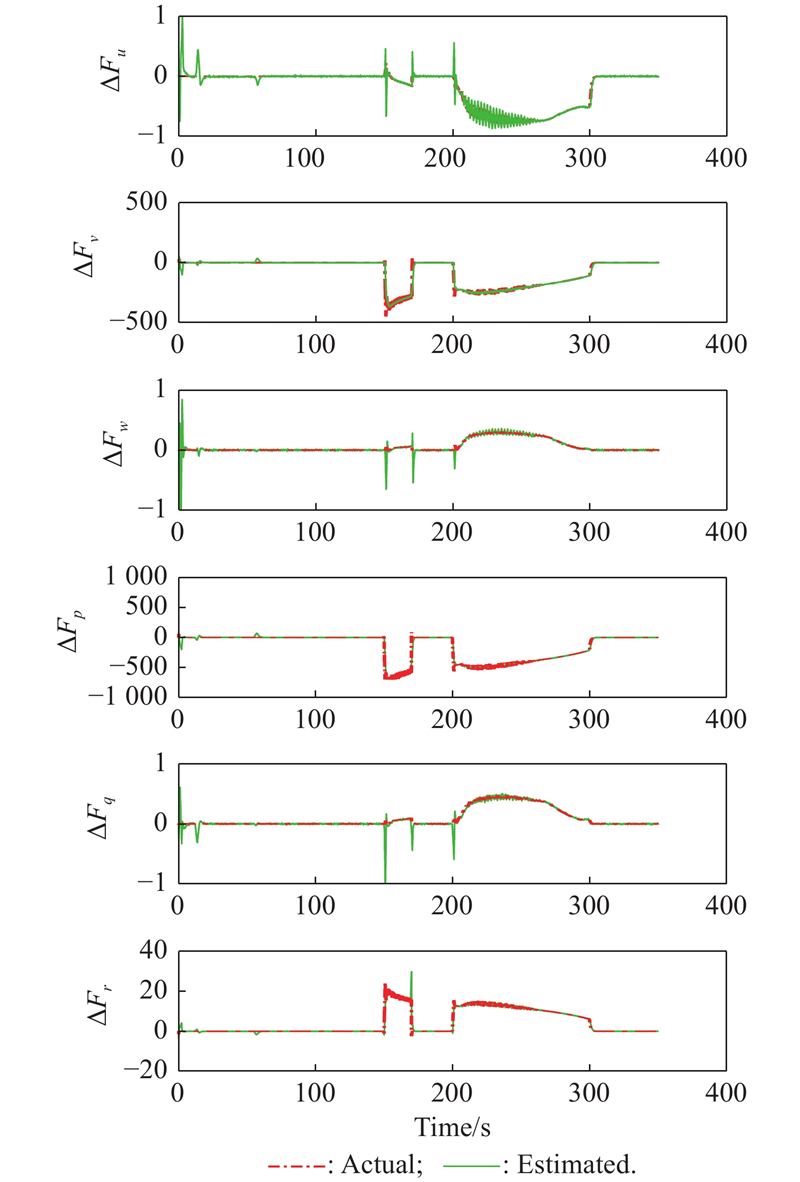
Table 6
Performance evaluation and comparison of proposed method with existing method for airship trajectory tracking control problem"
| Technique | Reference | NSS | RSS | DAAS | MMV | AMV | WD |
| PID | [ | Yes | No | Yes | Not considered | Not considered | Not considered |
| PID and dynamic inversion | [ | Yes | No | Yes | Not considered | Not considered | Not considered |
| MPC | [ | Yes | No | Yes | Not considered | Not considered | Considered |
| NMPC | [ | Yes | No | Yes | Not considered | Not considered | Considered |
| Gain scheduling | [ | Yes | Yes | Yes | Not considered | Not considered | Considered |
| BSC | [ | Yes | No | Yes | Not considered | Not considered | Considered |
| Adaptive BSC | [ | Yes | Yes | Yes | Not considered | Considered | Considered |
| NN-BSC | [ | Mixed | Yes | Yes | Considered | Considered | Not considered |
| Adaptive SMC | [ | Yes | Yes | Yes | Considered | Considered | Considered |
| Adaptive integral SMC | [ | Yes | Yes | Yes | Considered | Considered | Considered |
| Fuzzy SMC | [ | Mixed | Yes | Yes | Considered | Considered | Considered |
| Adaptive fuzzy SMC | [ | Mixed | Yes | Yes | Considered | Considered | Considered |
| NN-SMC | [ | Mixed | Yes | Yes | Considered | Considered | Considered |
| NN-NTSMC | [ | Mixed | Yes | Yes | Considered | Considered | Considered |
| NN-Fuzzy-SMC | [ | Mixed | Yes | Yes | Considered | Considered | Considered |
| ESMC | − | Yes | Yes | No | Considered | Considered | Considered |
| 1 | MILLER S H, FESEN R, HILLENBRAND L A, et al. Airships: a new horizon for science. Pasadena: The Keck Institute for Space Studies, 2014. |
| 2 | GERKE M, MASAR I, BORGOLTE U, et al. Farmland monitoring by sensor networks and airships. Proc. of the 4th IFAC Conference on Modelling and Control in Agriculture, 2018: 321−326. |
| 3 | DE PAIVA E C, BUENO S S, GOMES S B, et al. A control system development environment for AURORA’s semiautonomous robotic airship. Proc. of the IEEE International Conference on Robotics and Automation, 1999: 2328−2335. |
| 4 |
CHEN L, ZHOU G, YAN X J, et al Composite control of stratospheric airships with moving masses. Journal of Aircraft, 2012, 49 (3): 794- 801.
doi: 10.2514/1.C031364 |
| 5 | MOUTINHO A, AZINHEIRA J R. Stability and robustness analysis of the aurora airship control system using dynamic inversion. Proc. of the IEEE International Conference on Robotics and Automation, 2005: 2265−2270. |
| 6 | ZHANG J S, YANG X X, DENG X L, et al. Trajectory control method of stratospheric airships based on model predictive control in wind field. Proceedings of the Institution of Mechanical Engineers, Part G: Journal of Aerospace Engineering, 2019, 233(2): 418−25. |
| 7 | WASIM M, KASHIF A S, ALI A, et al. Integrated AFS and DYC using predictive controller for vehicle handling improvement. Proc. of the IEEE 18th International Bhurban Conference on Applied Sciences and Technologies, 2021: 568−573. |
| 8 | WASIM M, KASHIF A, AWAN A U, et al. Predictive control for improving vehicle handling and stability. Proc. of the IEEE International Conference on Intelligent Systems Engineering, 2016: 236−241. |
| 9 | WASIM M, KASHIF A, AWAN A U, et al. $ {H}_{\infty } $ control via scenario optimization for handling and stabilizing vehicle using AFS control. Proc. of the IEEE International Conference on Computing, Electronic and Electrical Engineering, 2016: 307−312. |
| 10 | YUAN J C, ZHU M, GUO X, et al. Trajectory tracking control for a stratospheric airship subject to constraints and unknown disturbances. IEEE Access, 2020, 8: 31453−31470. |
| 11 | MOUTINHO A, AZINHEIRA J R, DE PAIVA E C, et al. Airship robust path-tracking: a tutorial on airship modelling and gain-scheduling control design. Control Engineering Practice, 2016, 50: 22−36. |
| 12 |
HAN D, WANG X L, CHEN L, et al Command-filtered backstepping control for a multi-vectored thrust stratospheric airship. Transactions of the Institute of Measurement and Control, 2016, 38 (1): 93- 104.
doi: 10.1177/0142331214568237 |
| 13 | LIU S Q, GONG S J, LI Y X, et al. Vectorial backstepping method-based trajectory tracking control for an under-actuated stratospheric airship. The Aeronautical Journal, 2017, 121(1241): 916−939. |
| 14 | HAN D, WANG X L, CHEN L, et al. Adaptive backstepping control for a multi-vectored thrust stratospheric airship with thrust saturation in wind. Proceedings of the Institution of Mechanical Engineers, Part G: Journal of Aerospace Engineering, 2016, 230(1): 45−59. |
| 15 | LIU S Q, SANG Y J. Underactuated stratospheric airship trajectory control using an adaptive integral backstepping approach. Journal of Aircraft, 2018, 55(6): 2357−2371. |
| 16 | YANG Y N, WANG W Q, YAN Y. Adaptive backstepping neural network control for three dimensions trajectory tracking of robotic airships. CEAS Aeronautical Journal, 2017, 8: 579−587. |
| 17 | XIAO C, WANG Y Y, ZHOU P F, et al. Adaptive sliding mode stabilization and positioning control for a multi-vectored thrust airship with input saturation considered. Transactions of the Institute of Measurement and Control, 2018, 40(15): 4208−4219. |
| 18 | ZHENG Z W, SUN L. Adaptive sliding mode trajectory tracking control of robotic airships with parametric uncertainty and wind disturbance. Journal of the Franklin Institute, 2018, 355(1): 106−122. |
| 19 | XIAO C, HAN D, WANG Y Y, et al. Fault-tolerant tracking control for a multi-vectored thrust ellipsoidal airship using adaptive integral sliding mode approach. Proceedings of the Institution of Mechanical Engineers, Part G: Journal of Aerospace Engineering, 2018, 232(10): 1911−1924. |
| 20 | YAO S Y, WANG H P, TIAN Y. Trajectory tracking control of a stratospheric airship with fuzzy sliding mode control. Proc. of the 37th IEEE Chinese Control Conference, 2018: 3955−3960. |
| 21 | YANG Y N, YAN Y, ZHU Z L, et al. Positioning control for an unmanned airship using sliding mode control based on fuzzy approximation. Proceedings of the Institution of Mechanical Engineers, Part G: Journal of Aerospace Engineering, 2014, 228(14): 2627−2640. |
| 22 | YANG Y N, WU J, ZHENG W. Trajectory tracking for an autonomous airship using fuzzy adaptive sliding mode control. Journal of Zhejiang University SCIENCE C, 2012, 13(7): 534−543. |
| 23 | LOU W J, ZHU M, GUO X, et al. Command filtered sliding mode trajectory tracking control for unmanned airships based on RBFNN approximation. Advances in Space Research. 2019, 63(3): 1111−1121. |
| 24 | YANG Y N, YAN Y. Neural network gain-scheduling sliding mode control for three-dimensional trajectory tracking of robotic airships. Proceedings of the Institution of Mechanical Engineers, Part I: Journal of Systems and Control Engineering. 2015, 229(6): 529−540. |
| 25 |
YANG Y N, YAN Y Neural network approximation-based nonsingular terminal sliding mode control for trajectory tracking of robotic airships. Aerospace Science and Technology, 2016, 54, 192- 197.
doi: 10.1016/j.ast.2016.04.021 |
| 26 | YANG Y N, YAN Y. Trajectory tracking for robotic airships using sliding mode control based on neural network approximation and fuzzy gain scheduling. Proceedings of the Institution of Mechanical Engineers, Part I: Journal of Systems and Control Engineering, 2016, 230(2): 184−196. |
| 27 | WASIM M, ALI A, CHOUDHRY M A, et al. Unscented Kalman filter for airship model uncertainties and wind disturbance estimation. PloS One. 2021, 16(11): e0257849. |
| 28 | ASHRAF M Z, CHOUDHRY M A. Dynamic modeling of the airship with Matlab using geometrical aerodynamic parameters. Aerospace Science and Technology, 2013, 25(1): 56−64. |
| 29 | LIU J. Sliding mode control using MATLAB. Beijing: Academic Press, 2017. (in Chinese) |
| 30 | MathWorks. Sensor fusion and tracking Toolbox™: user’s guide (R2019b). https://www.mathworks.com/help/pdf_doc/fusion/. |
| 31 | WASIM M, ALI A Estimation of airship aerodynamic forces and torques using extended Kalman filter. IEEE Access, 2020, 8, 70204- 70215. |
| 32 | WASIM M, ALI A. Airship aerodynamic model estimation using unscented Kalman filter. Journal of Systems Engineering and Electronics, 2020, 31(6): 1318−1329. |
| 33 | Alliance for Sustainable Energy. Meteorological data of Pakistan. https://maps.nrel.gov/rede-pakistan/. |
| 34 | VALLE R C, MENEGALDO L L, SIMOES A M. Smoothly gain-scheduled control of a tri-turbofan airship. Journal of Guidance, Control, and Dynamics, 2015, 38(1): 53−61. |
| 35 | U.S. Department of Defense. Flying qualities of piloted aircraft, handbook MIL-HDBK-1797. Washington: U.S. Department of Defense, 1997. |
| [1] | Yutao ZHAI, Yongzheng SHEN, Xiangbin YAN, Huifeng TAN. Methods of configuration test and deformation analysis for large airship [J]. Journal of Systems Engineering and Electronics, 2022, 33(4): 951-960. |
| [2] | Narin JEERANANTASIN, Suksun NUNGAM. Sliding mode control of three-phase AC/DC converters using exponential rate reaching law [J]. Journal of Systems Engineering and Electronics, 2022, 33(1): 210-221. |
| [3] | Muhammad WASIM, Ahsan ALI. Airship aerodynamic model estimation using unscented Kalman filter [J]. Journal of Systems Engineering and Electronics, 2020, 31(6): 1318-1329. |
| [4] | Mahmoudreza HADAEGH, Hamid KHALOOZADEH. Modified switched IMM estimator based on autoregressive extended Viterbi method for maneuvering target tracking [J]. Journal of Systems Engineering and Electronics, 2018, 29(6): 1142-1157. |
| [5] | Yueneng YANG, Ye YAN. Backstepping sliding mode control for uncertain strictfeedback nonlinear systems using neural-network-based adaptive gain scheduling [J]. Journal of Systems Engineering and Electronics, 2018, 29(3): 580-586. |
| [6] | Litong Ren, Shousheng Xie, Yu Zhang, Jingbo Peng, and Ledi Zhang. Chattering analysis for discrete sliding mode control of distributed control systems [J]. Journal of Systems Engineering and Electronics, 2016, 27(5): 1096-1107. |
| [7] | Liu Cui, Li Chen, and Dengping Duan. Gain-scheduling model predictive control for unmanned airship with LPV system description [J]. Journal of Systems Engineering and Electronics, 2015, 26(5): 1043-1051. |
| [8] | Halil Ersin S¨oken and Chingiz Hajiyev. REKF and RUKF for pico satellite attitude estimation in the presence of measurement faults [J]. Journal of Systems Engineering and Electronics, 2014, 25(2): 288-297. |
| [9] | Yueneng Yang, Jie Wu, and Wei Zheng. Adaptive fuzzy sliding mode control for robotic airship with model uncertainty and external disturbance [J]. Journal of Systems Engineering and Electronics, 2012, 23(2): 250-255. |
| [10] | Binglong Cong, Xiangdong Liu, and Zhen Chen. Disturbance observer based time-varying sliding mode control for uncertain mechanical system [J]. Journal of Systems Engineering and Electronics, 2012, 23(1): 108-118. |
| [11] | Zhang Yan, Qu Weidong, Xi Yugeng & Cai Zili. Stabilization and trajectory tracking of autonomous airship’s planar motion [J]. Journal of Systems Engineering and Electronics, 2008, 19(5): 974-981. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||