
Journal of Systems Engineering and Electronics ›› 2025, Vol. 36 ›› Issue (5): 1161-1168.doi: 10.23919/JSEE.2024.000116
• ELECTRONICS TECHNOLOGY • Previous Articles
Yunlong ZUO1( ), Xu LYU2,*(), Xiaofeng ZHANG1()
), Xu LYU2,*(), Xiaofeng ZHANG1()
Received:2023-12-14
Accepted:2024-09-27
Online:2025-10-18
Published:2025-10-24
Contact:
Xu LYU
E-mail:327731817@qq.com;lvclay@163.com;zhangxiaofeng201@126.com
About author:Supported by:Yunlong ZUO, Xu LYU, Xiaofeng ZHANG. Research on the unified robust Gaussian filters based on M-estimation[J]. Journal of Systems Engineering and Electronics, 2025, 36(5): 1161-1168.

Fig 1
Illustration of the presented work"
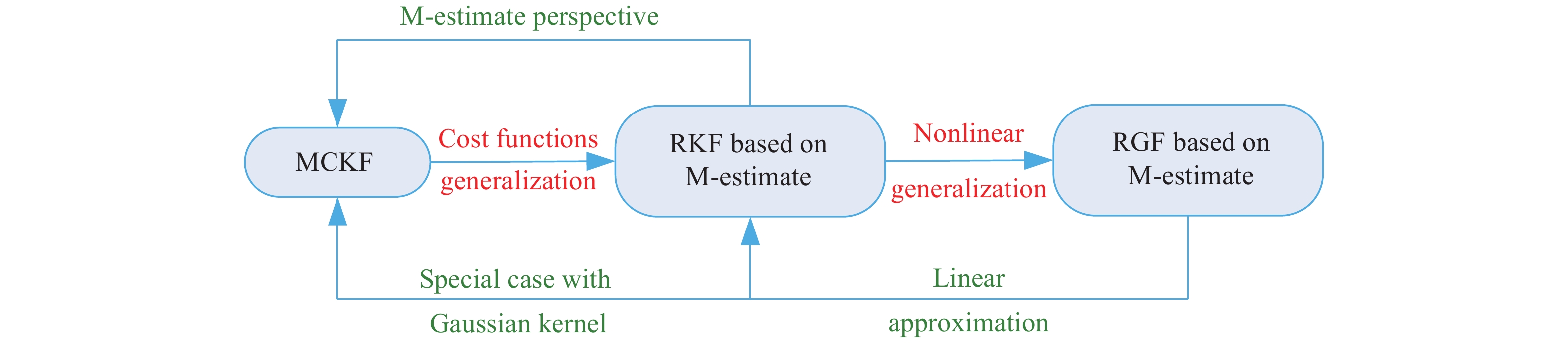
Fig 2
Illustration of different weight functions"
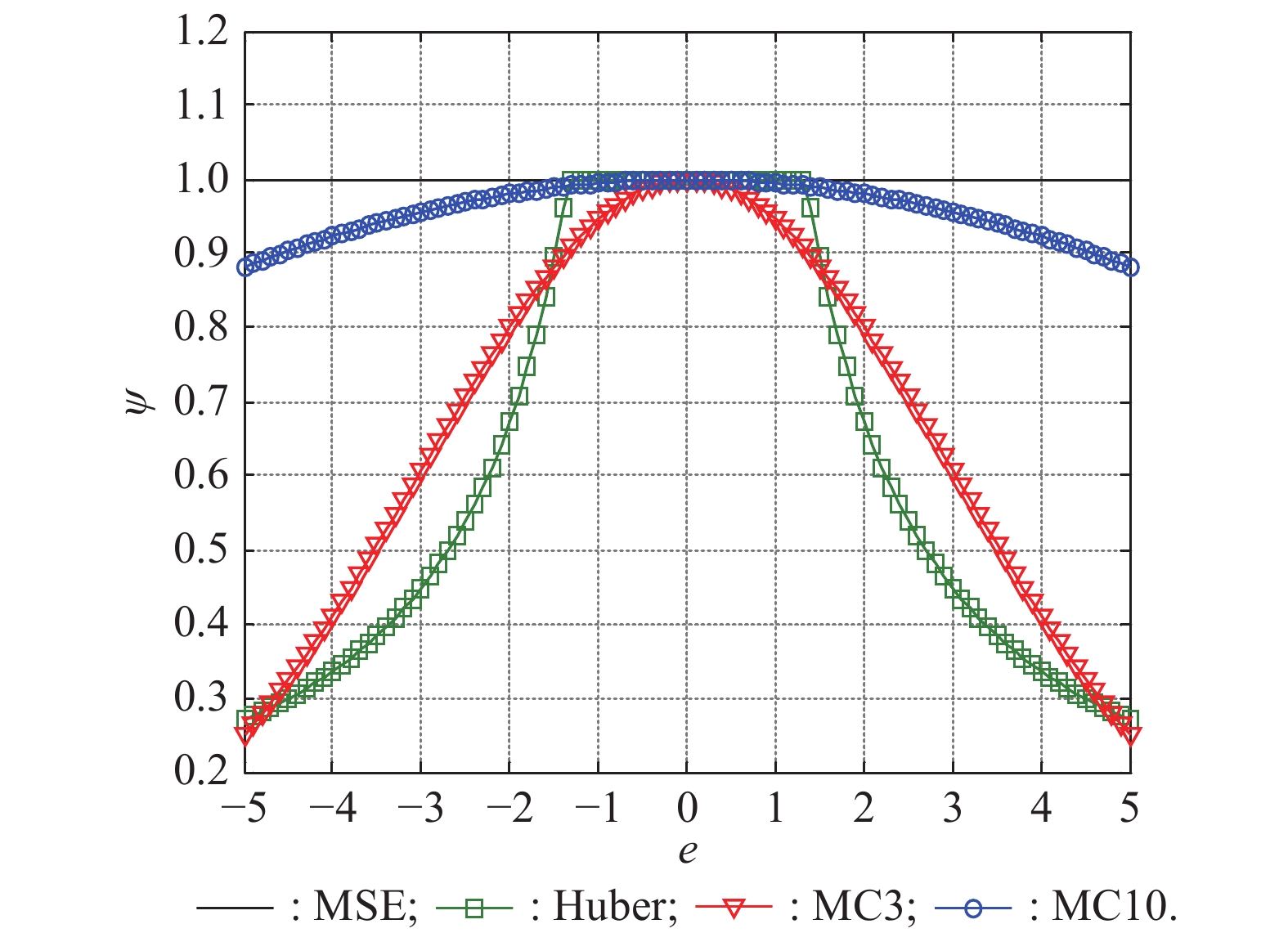
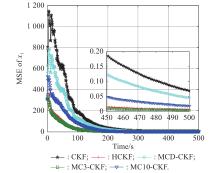
Fig 3
MSEs of the first state by different filtering algorithms"
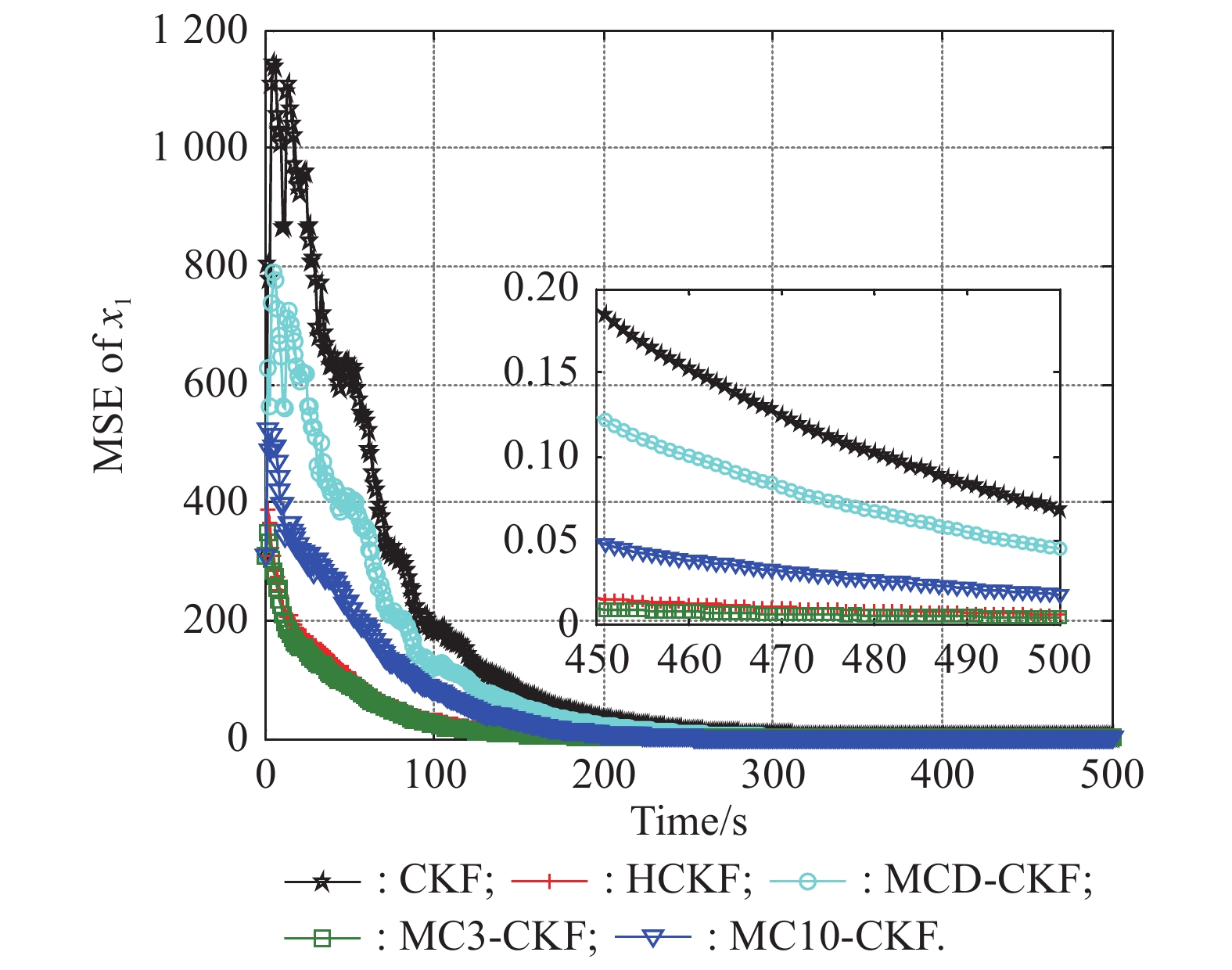
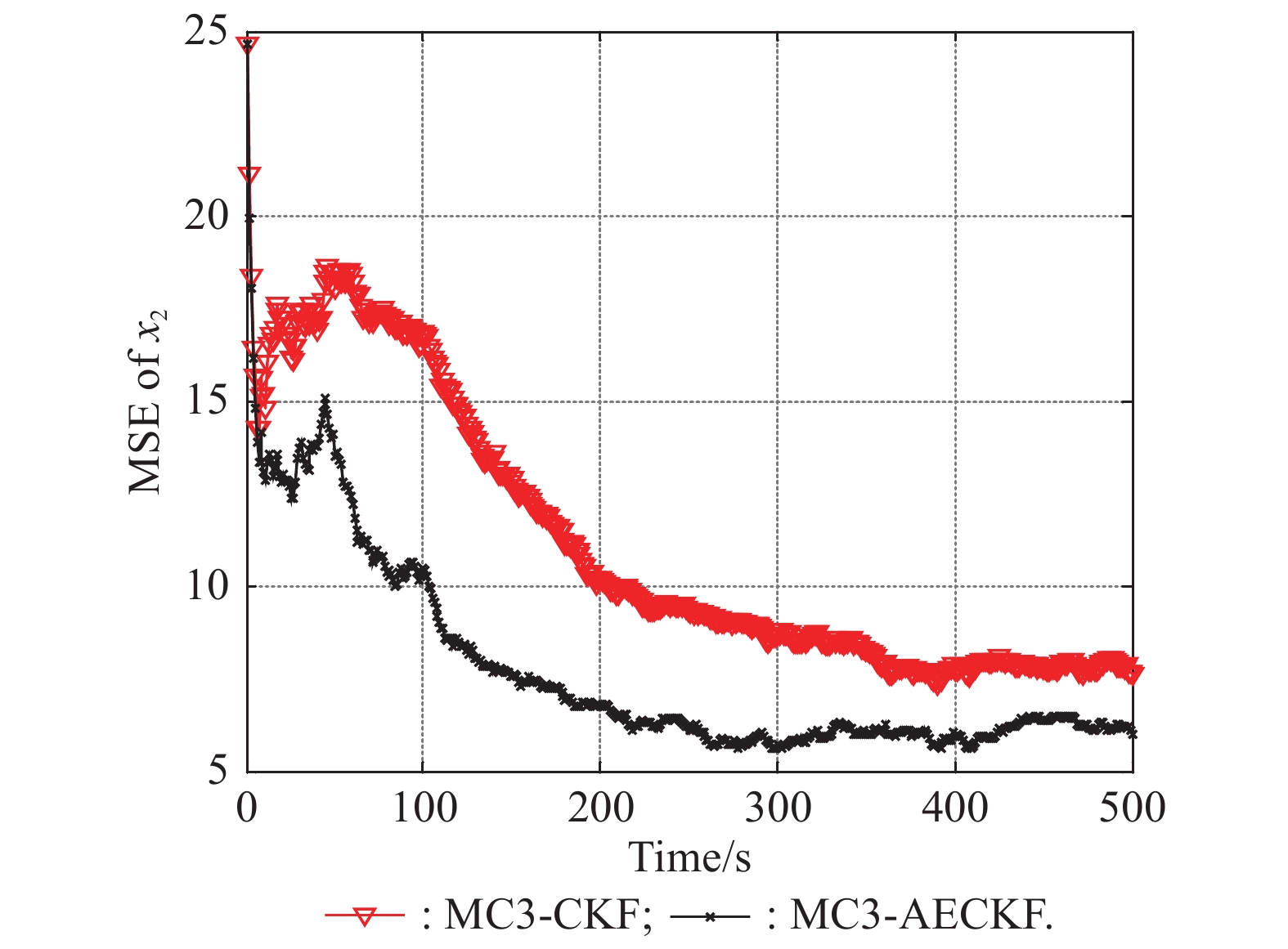
Fig 4
MSEs of the second state by different filtering algorithms"
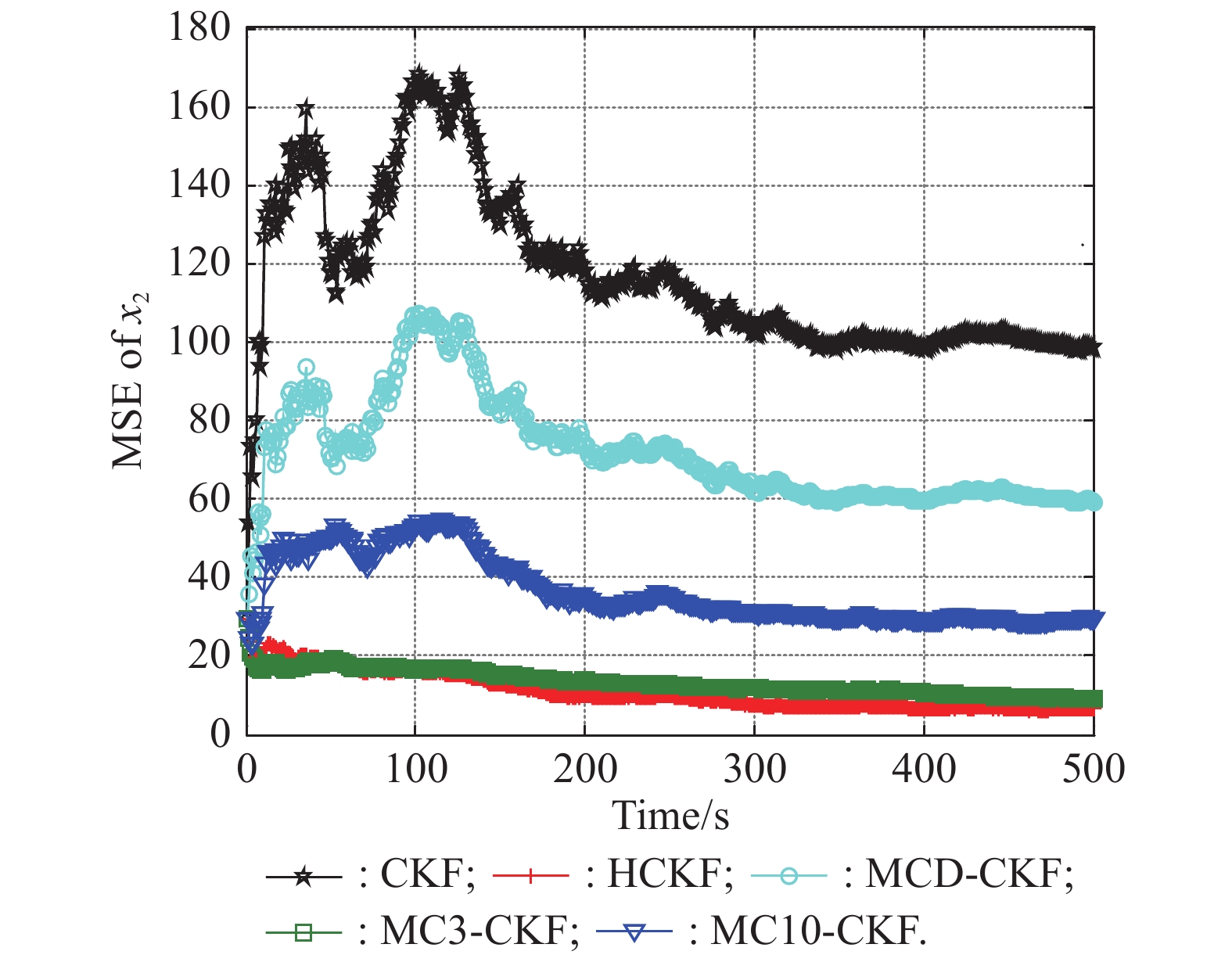
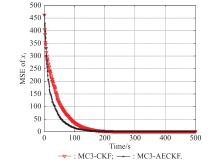
Fig 5
Results of the first state by MC3-AECKF and MC3-CKF"
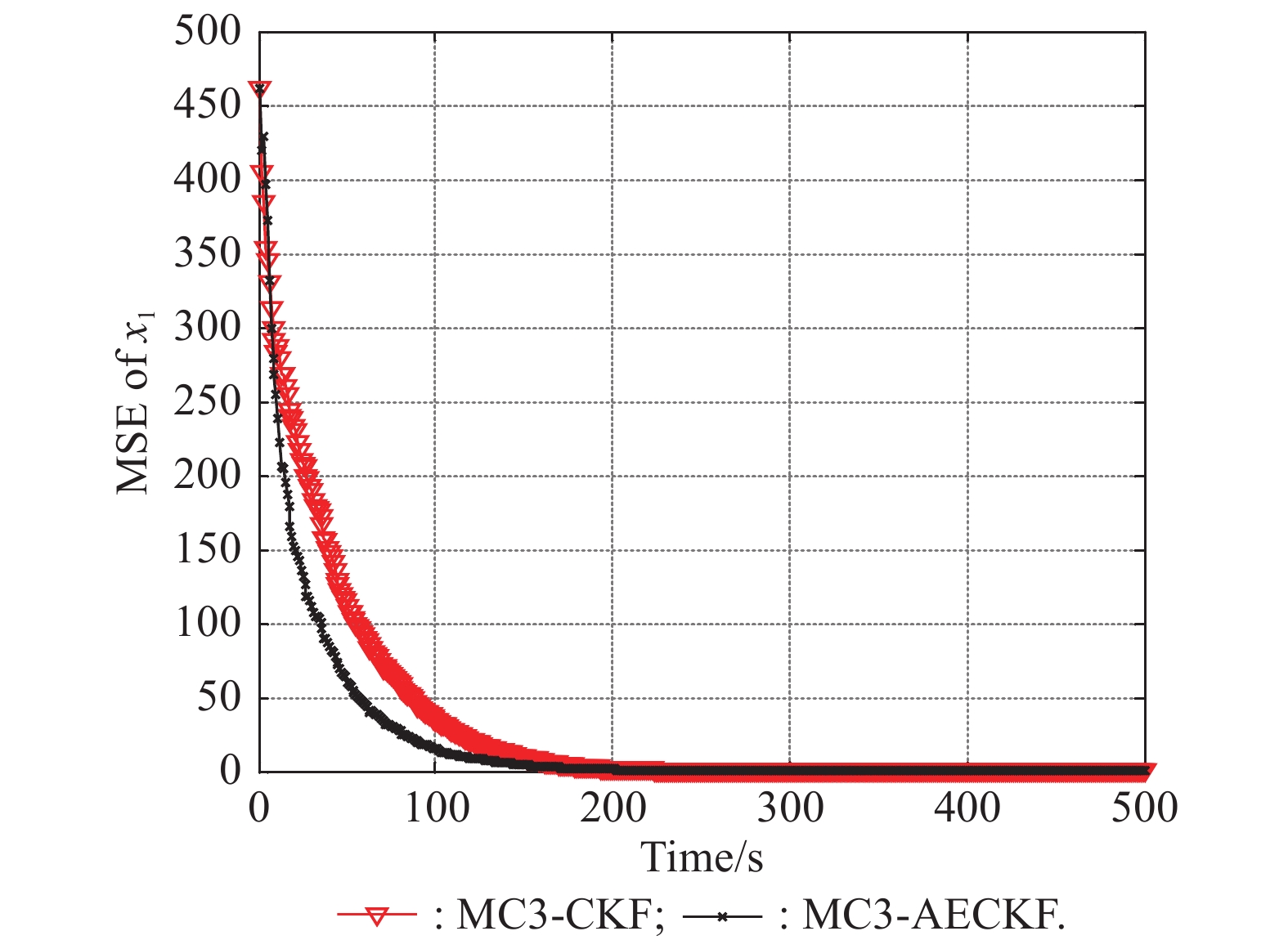
Fig 6
Results of the second state by MC3-AECKF and MC3-CKF"
| 1 | MERWE R V D, WAN E. Sigma-point Kalman filters for probabilistic inference in dynamic state-space models. Proc. of the IEEE International Conference on Acoustics, Speech, and Signal Processing, 2023. DOI: 10.1109/ICASSP.2003.1201778. |
| 2 | SIMON D. Optimal state estimation: Kalman, H∞ and nonlinear approaches. Hoboken: Wiley, 2006. |
| 3 | LYU X, HU B Q, DAI Y B, et al Gaussian process regression-based quaternion unscented Kalman robust filter for integrated SINS/GNSS. Journal of Systems Engineering and Electronics, 2022, 33 (5): 1079- 1088. |
| 4 |
FARAHMAND S, GIANNAKIS G B, ANGELOSANTE D Doubly robust smoothing of dynamical processes via outlier sparsity constraints. IEEE Trans. on Signal Processing, 2011, 59 (10): 4529- 4543.
doi: 10.1109/TSP.2011.2161300 |
| 5 | ARAVKIN A Y, BURKE J V, PILLONETTO G. Optimization viewpoint on Kalman smoothing with applications to robust and sparse estimation. Signal & Communication Technology, 2013: 237–280. |
| 6 |
OHLSSON H, GUSTAFSSON F, LJUNG L Smoothed state estimates under abrupt changes using sum-of-norms regularization. Automatic, 2012, 48 (4): 595- 605.
doi: 10.1016/j.automatica.2011.08.063 |
| 7 |
ARULAMPALAM M S, MASKELL S, GORDON N, et al Tutorial on particle filters for online nonlinear/non-Gaussian Bayesian tracking. IEEE Trans. on Signal Processing, 2002, 50 (2): 174- 188.
doi: 10.1109/78.978374 |
| 8 |
CHOPIN N A sequential particle filter method for static modes. Biometrika, 2002, 89 (3): 539- 551.
doi: 10.1093/biomet/89.3.539 |
| 9 |
YIN J J, ZHANG J Q Gaussian sum PHD filtering algorithm for nonlinear non-Gaussian models. Chinese Journal of Aeronautics, 2008, 21 (4): 341- 351.
doi: 10.1016/S1000-9361(08)60045-X |
| 10 |
PSIAKI M L, SCHOENBERG J, MILLER I T Gaussian sum reapproximation for use in a nonlinear filter. Journal of Guidance, Control, and Dynamics, 2015, 38 (2): 292- 303.
doi: 10.2514/1.G000541 |
| 11 | HUBER P J, RONCHETTI E M. Robust statistics. Second edition. Hoboken: John Wiley & Sons, Inc., 2009. |
| 12 | DUROVIC Z M, KOVACEVIC B D Robust estimation with unknown noise statistics. IEEE Trans. on Automatic Control, 1999, 44 (6): 1292- 1296. |
| 13 | MARONNA R A, MARTIN R D, YOHAI V J. Robust statistics: theory and methods. Chichester: John Wiley & Sons, Ltd, 2006. |
| 14 |
LYU X, HU B, LI K, et al An adaptive and robust UKF approach based on Gaussian process regression-aided variational Bayesian. IEEE Sensors Journal, 2021, 21 (7): 9500- 9514.
doi: 10.1109/JSEN.2021.3055846 |
| 15 |
CHANG L B, LI K L, HU B Q Huber’s M-estimation based process uncertainty robust filter for integrated INS/GPS. IEEE Sensors Journal, 2015, 15 (6): 3367- 3374.
doi: 10.1109/JSEN.2014.2384492 |
| 16 | LI K L, CHANG L B, HU B Q. A variational Bayesian-based unscented Kalman filter with both adaptivity and robustness. IEEE Sensors Journal, 2016, 16(18): 6966–6976. |
| 17 | ZHAO Y X, QI W D, LIU P, et al. M-estimation-based robust Kalman filter algorithm for three-dimensional AoA target tracking. Proc. of the IEEE 3rd International Conference on Information Communication and Signal Processing, 2020: 74–79. |
| 18 | KARLGAARD C D, SCHAUB H Huber-based divided difference filtering. Journal of Guidance, Control, and Dynamics, 2007, 30 (3): 885- 891. |
| 19 |
CHANG L B, HU B Q, CHANG G B, et al Huber-based novel robust unscented Kalman filter. IET Science, Measurement and Technology, 2012, 6 (6): 502- 509.
doi: 10.1049/iet-smt.2011.0169 |
| 20 |
CHANG L B, HU B Q, CHANG G B, et al Robust derivative-free Kalman filter based on Huber’s M-estimation methodology. Journal of Process Control, 2013, 23 (10): 1555- 1561.
doi: 10.1016/j.jprocont.2013.05.004 |
| 21 | ZHU B, CHANG L B, XU J N Huber-based adaptive unscented filter and non-Gaussian measurement noise. Signal Processing, 2018, 37 (9): 3842- 3861. |
| 22 | TSENG C H, LIN S F, JWO D J. Robust Huber-based cubature Kalman filter for GPS navigation processing. Journal of Navigation, 2016, 70(3): 527–546. |
| 23 |
WU H, CHEN S X, YANG B F, et al Robust derivative-free cubature Kalman filter for bearing-only tracking. IEEE Trans. on Smart Grid, 2019, 10 (2): 1215- 1224.
doi: 10.1109/TSG.2017.2761452 |
| 24 |
CHEN B D, WANG J J, ZHAO H Q, et al Convergence of a fixed-point algorithm under maximum correntropy criterion. IEEE Signal Process Letters, 2015, 22 (10): 1723- 1727.
doi: 10.1109/LSP.2015.2428713 |
| 25 |
CHEN B D, XING L, ZHAO H Q, et al Generalized correntropy for robust adaptive filtering. IEEE Trans. on Signal Processing, 2016, 64 (13): 3376- 3387.
doi: 10.1109/TSP.2016.2539127 |
| 26 |
CHEN B D, WANG X, LI Y S, et al Maximum correntropy criterion with variable center. IEEE Signal Processing Letters, 2019, 26 (8): 1212- 1216.
doi: 10.1109/LSP.2019.2925692 |
| 27 | WANG G Q, ZHANG Y G, WANG X D. Maximum correntropy Rauch-Tung-Striebel smoother for nonlinear and non-Gaussian systems. IEEE Trans. on Automatic Control, 2021, 66(3): 1270–1277. |
| 28 | IZANLOO R, FAKOORIAN S A, YAZDI H S, et al. Kalman filtering based on the maximum correntropy criterion in the presence of non-Gaussian noise. Proc. of the Annual Conference on Information Science and Systems, 2016. |
| 29 |
LIU X, CHEN B D, ZHAO H Q, et al Maximum correntropy Kalman filter with state constraints. IEEE Access, 2017, 5, 25846- 25853.
doi: 10.1109/ACCESS.2017.2769965 |
| 30 |
CHEN B D, LIU X, ZHAO H Q, et al Maximum correntropy Kalman filter. Automatica, 2017, 76, 70- 77.
doi: 10.1016/j.automatica.2016.10.004 |
| 31 |
AMINI-OMAM M, TORKAMANI-AZAR F, GHORASHI S A Maximum likelihood estimation for multiple camera target tracking on Grassmann tangent subspace. IEEE Trans. on Cybernetics, 2018, 48 (1): 77- 89.
doi: 10.1109/TCYB.2016.2624309 |
| 32 | SCOTT D W Parametric statistical modeling by minimum integrated square error. Technometrics, 2011, 43 (3): 274- 285. |
| 33 | SARKKA S. Bayesian filtering and smoothing. Cambridge: Cambridge University Press, 2013. |
| 34 |
ARASARATNAM I, HAYKIN S Cubature Kalman filters. IEEE Trans. on Automatic Control, 2009, 54 (6): 1254- 1269.
doi: 10.1109/TAC.2009.2019800 |
| 35 |
ZHANG Y G, HUANG Y L, LI N, et al Embedded cubature Kalman filter with adaptive setting of free parameter. Signal Processing, 2015, 114, 112- 116.
doi: 10.1016/j.sigpro.2015.02.022 |
| 36 |
LI W Y, WEI G L, HAN F, et al Weighted average consensus-based unscented Kalman filtering. IEEE Trans. on Cybernetics, 2016, 46 (2): 558- 567.
doi: 10.1109/TCYB.2015.2409373 |
| [1] | Yu LI, Honglan WU, Youchao SUN. Improved adaptive genetic algorithm based RFID positioning [J]. Journal of Systems Engineering and Electronics, 2022, 33(2): 305-311. |
| [2] | Yongbin YU, Nijing YANG, Chenyu YANG, Tashi NYIMA. Memristor bridge-based low pass filter for image processing [J]. Journal of Systems Engineering and Electronics, 2019, 30(3): 448-455. |
| [3] | Xiaoyu Li, Jing Jin, Yi Shen, and Yipeng Liu. Noise level estimation method with application to EMD-based signal denoising [J]. Systems Engineering and Electronics, 2016, 27(4): 763-. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||