
Journal of Systems Engineering and Electronics ›› 2025, Vol. 36 ›› Issue (2): 580-596.doi: 10.23919/JSEE.2025.000039
• CONTROL THEORY AND APPLICATION • Previous Articles
Xinyu LI1,2( ), Zhaofa ZHOU1,2,*(), Zhili ZHANG1,2(), Zhenjun CHANG1,2(), Shiwen HAO1,2()
), Zhaofa ZHOU1,2,*(), Zhili ZHANG1,2(), Zhenjun CHANG1,2(), Shiwen HAO1,2()
Received:2024-01-11
Online:2025-04-18
Published:2025-05-20
Contact:
Zhaofa ZHOU
E-mail:1025997454@qq.com;zzftxy@163.com;zhangzl@126.com;changzj2105@163.com;wenjy70796@163.com
About author:Supported by:Xinyu LI, Zhaofa ZHOU, Zhili ZHANG, Zhenjun CHANG, Shiwen HAO. Approach to dynamic error suppression in ground vehicle gravimetry based on external velocity compensation[J]. Journal of Systems Engineering and Electronics, 2025, 36(2): 580-596.
Add to citation manager EndNote|Reference Manager|ProCite|BibTeX|RefWorks
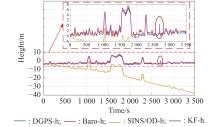
Fig 1
Experimental results of height measurement"
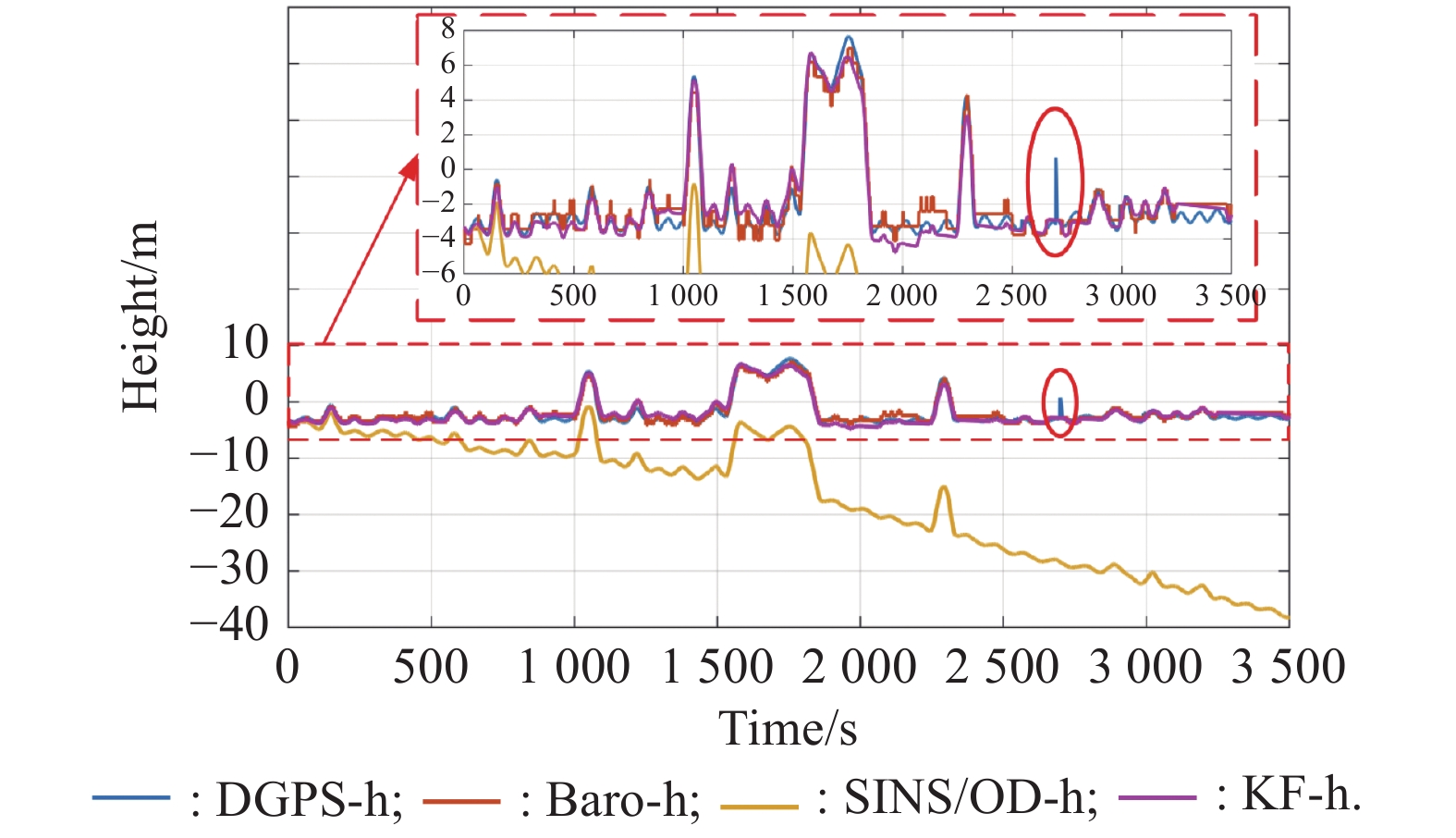
Table 1
Statistics of height measurement results m"
| Method | Error | |||
| Max | Min | Mean | Std | |
| Baro-h | 2.30 | −1.95 | 0.48 | 0.58 |
| SINS/OD-h | 0.03 | −38.27 | −18.9 | 12.9 |
| KF-h | 1.63 | −1.36 | 0.11 | 0.37 |
Fig 2
Vertical acceleration error compared to GPS"
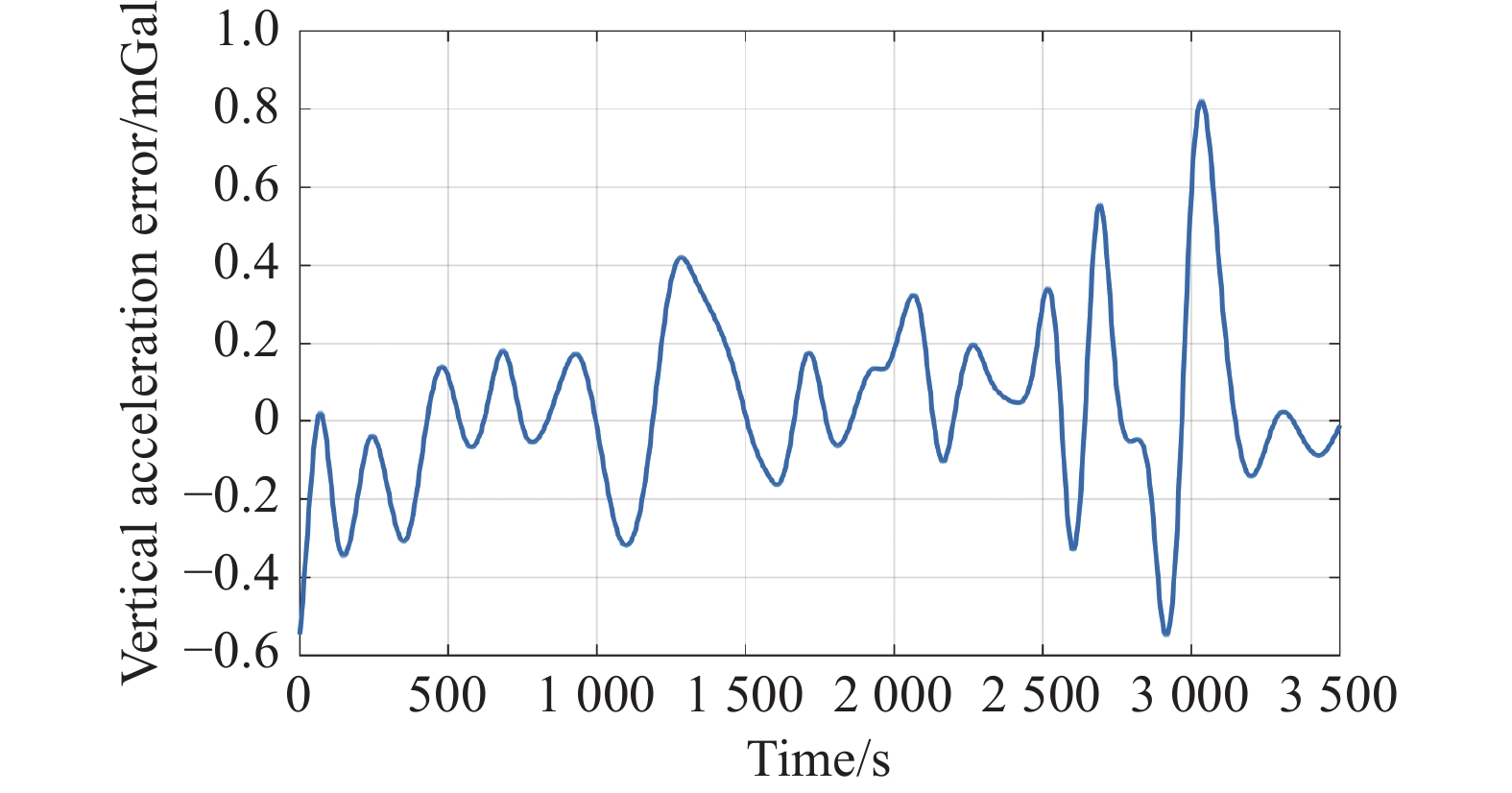
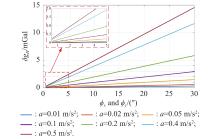
Fig 3
Simulation results of dynamic error introduced by platform tilt angle"
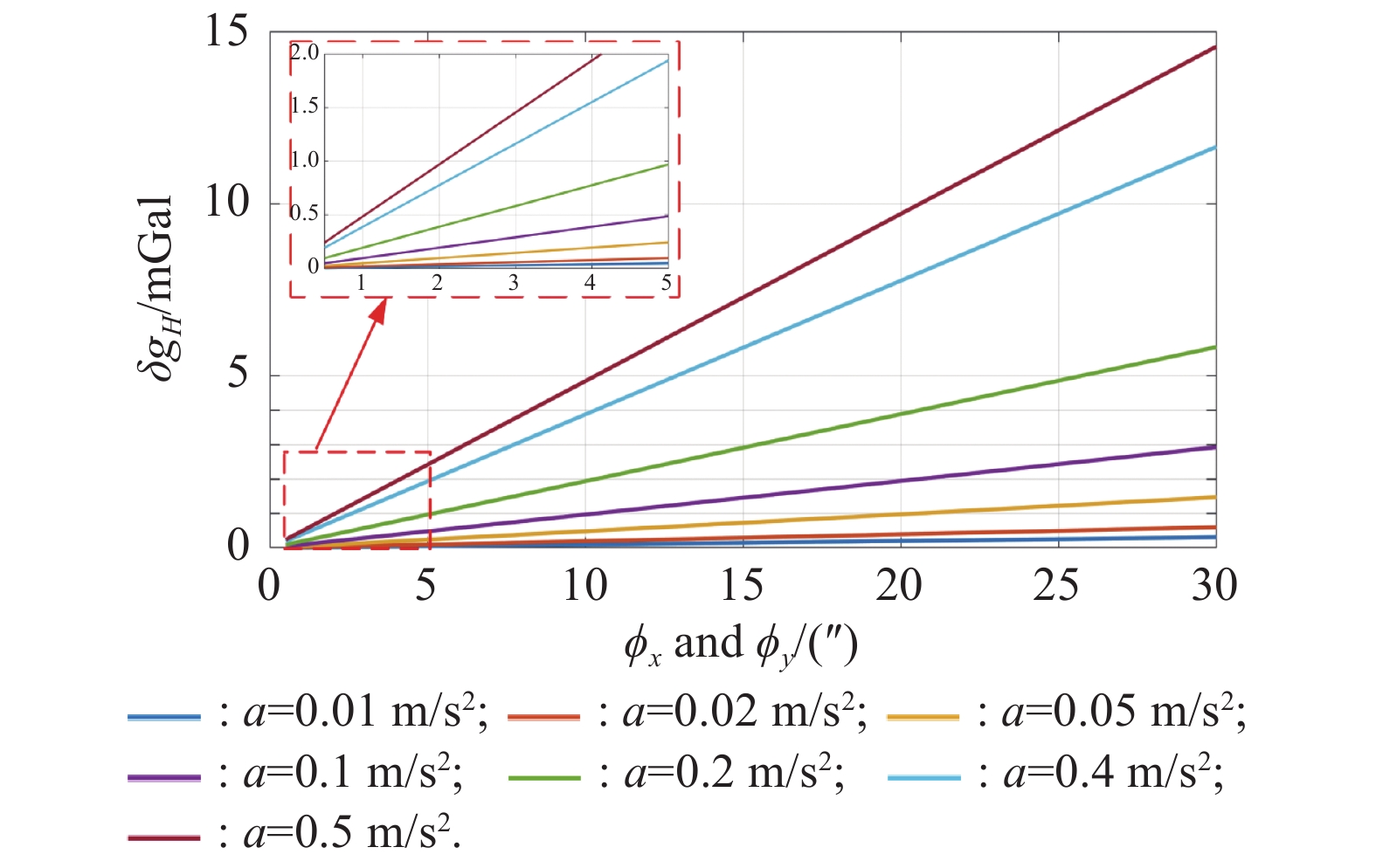
Fig 4
Structure for external velocity compensation"
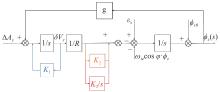
Fig 5
Inertial platform horizontal error third-order damping network"
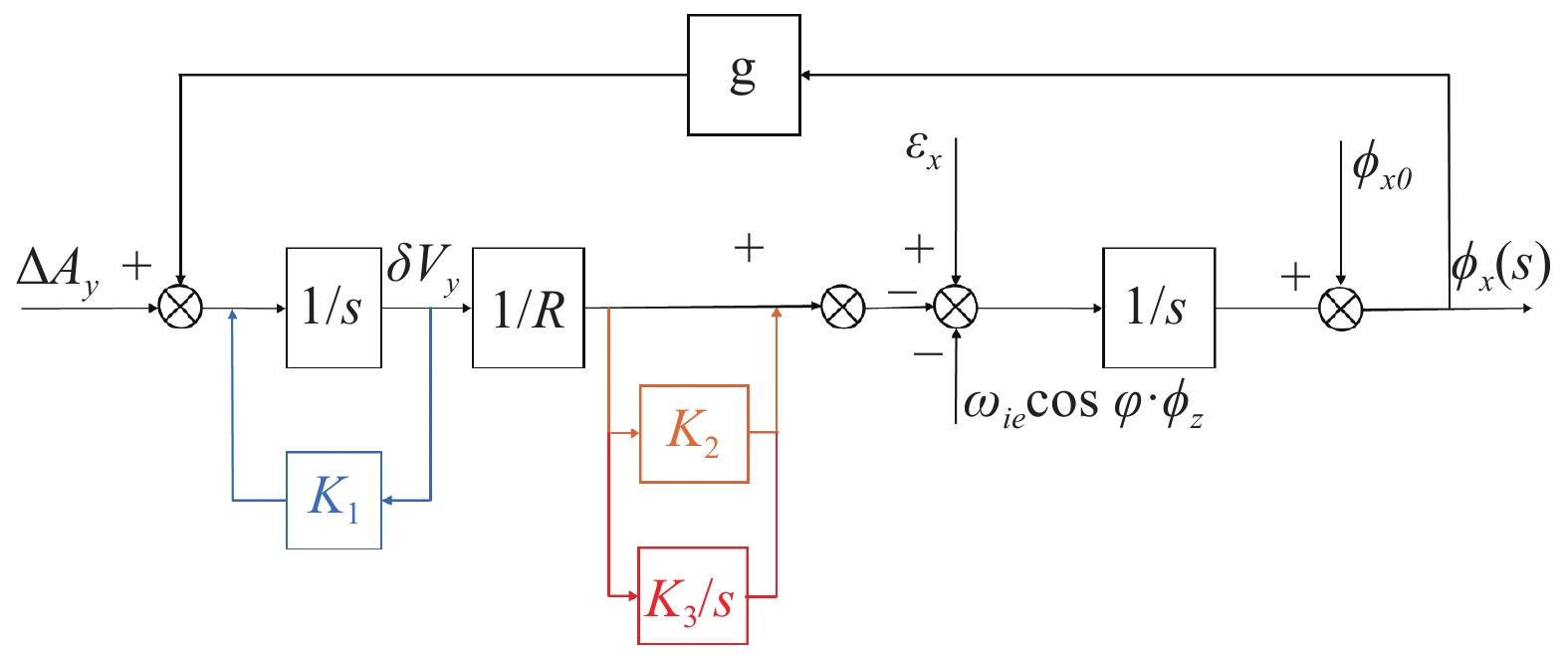
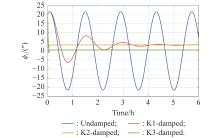
Fig 6
Horizontal error angle under damping loop"
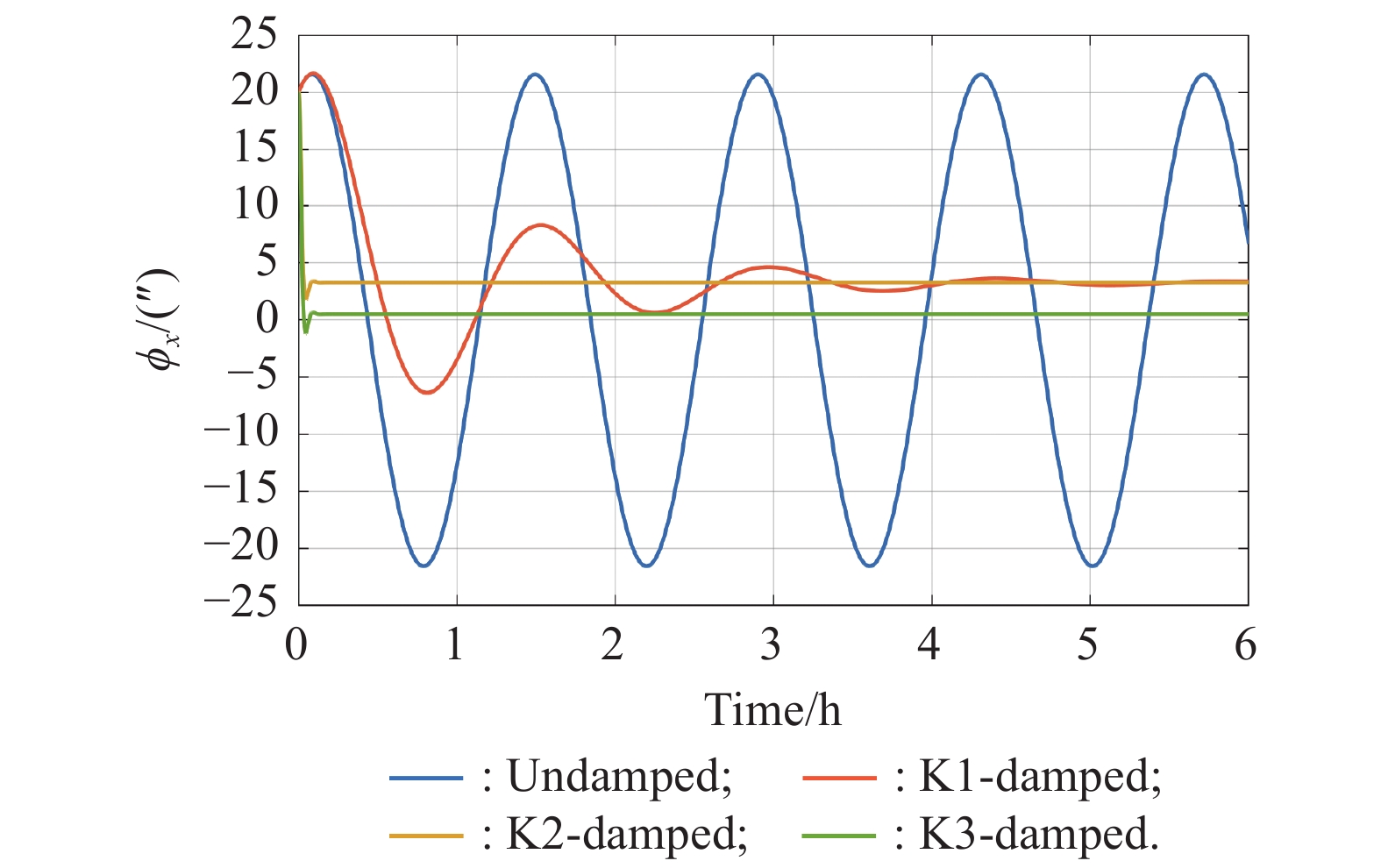
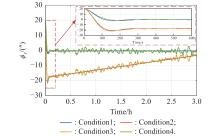
Fig 7
Horizontal error angle under external velocity compensation"
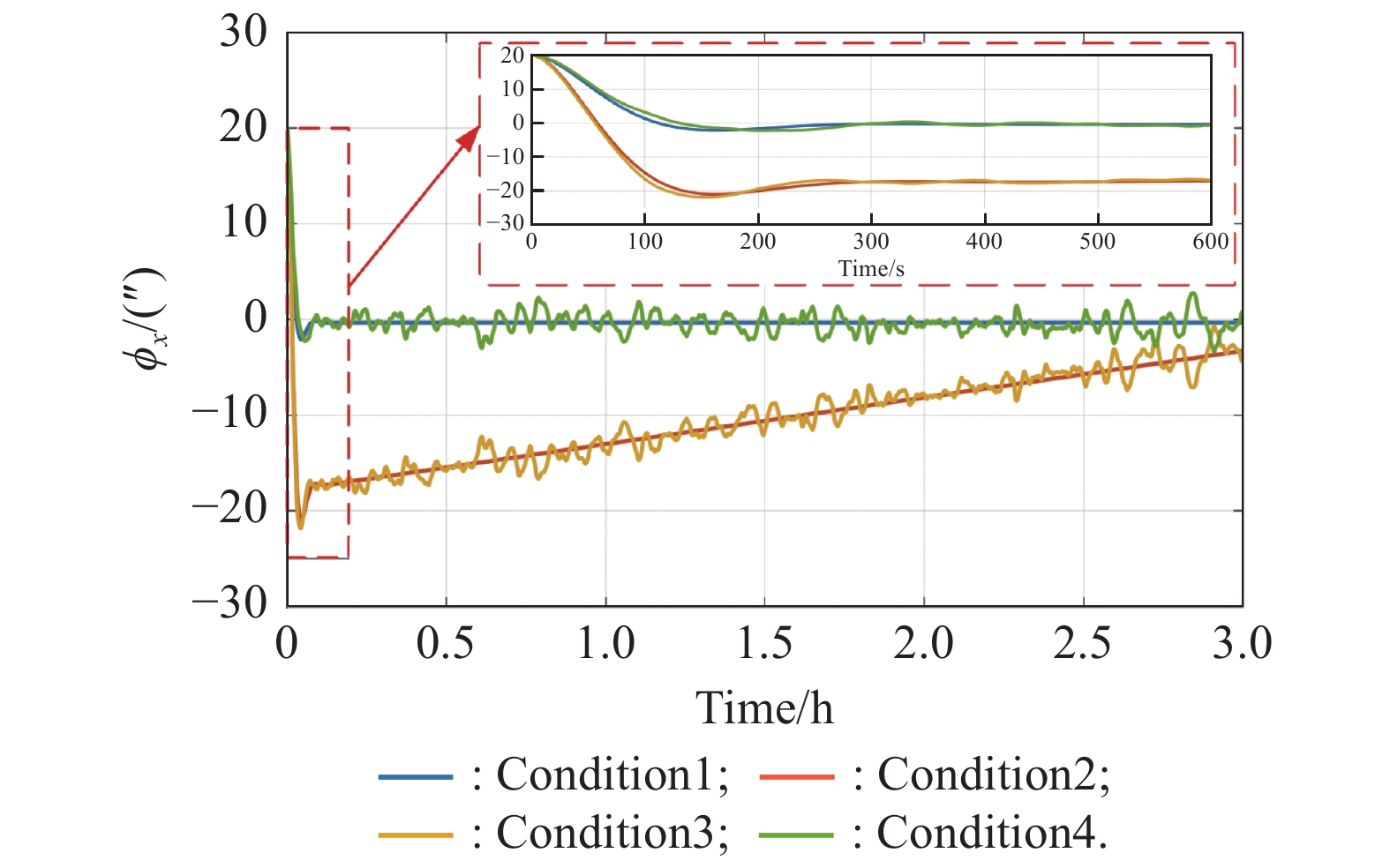
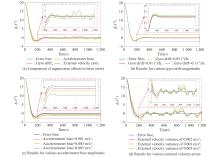
Fig 8
Simulation results for different error cases"


Fig 9
Design of federal Kalman filter structure"
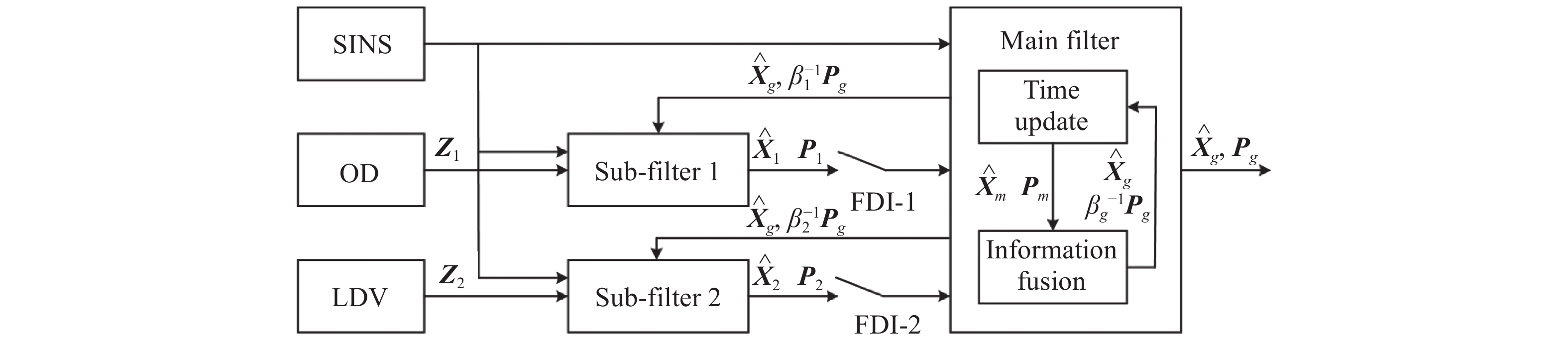
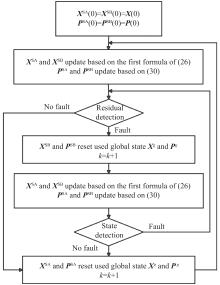
Fig 10
Flowchart of joint state-residual detection"
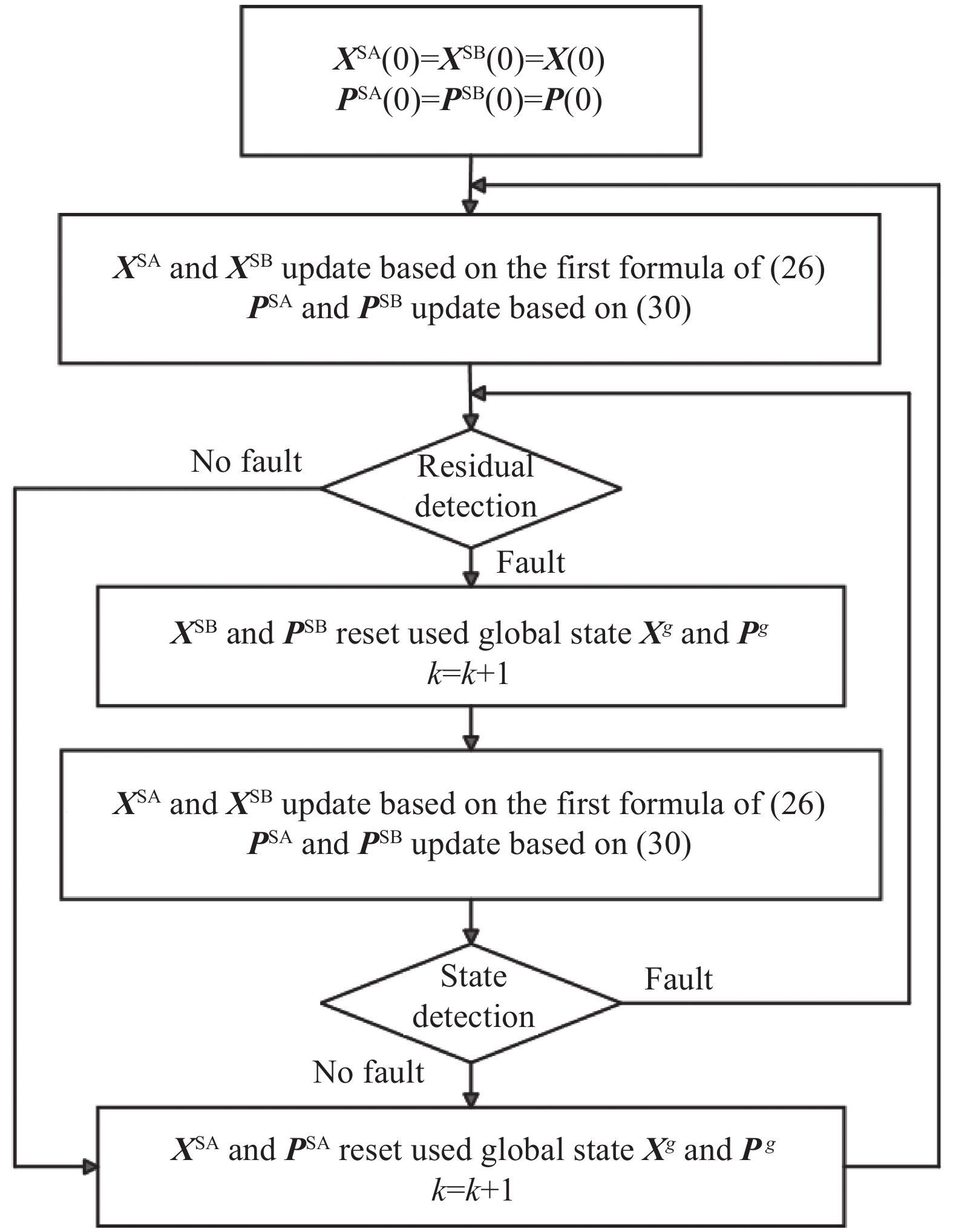
Table 2
Simulation parameter settings"
| Device/Sensor | Characteristic | Accuracy |
| Inertial measurement unit (IMU) | Acce bias stability/mGal | 10 |
| Acce random walk/mGal | 5 | |
| Gyro bias instability/((°)/h) | 0.001 | |
| Gyro random walk/( | ||
| Sample frequency/Hz | 100 | |
| OD | Installation error | [1′;1′;10′] |
| Scale factor | kod = | |
| Time asynchronism/s | dT = 0.01 | |
| Fault type and time/s | Zero setting: 2 097−2 100 Uprush: 6 000−6 005 | |
| LDV | Installation error | [1′;1′;10′] |
| Scale factor | kldv = 1.002 | |
| Time asynchronism/s | dT = 0.01 | |
| Fault type and time/s | Zero setting: 4 197−4 200 |

Fig 11
Diagram of OD fault detection results"
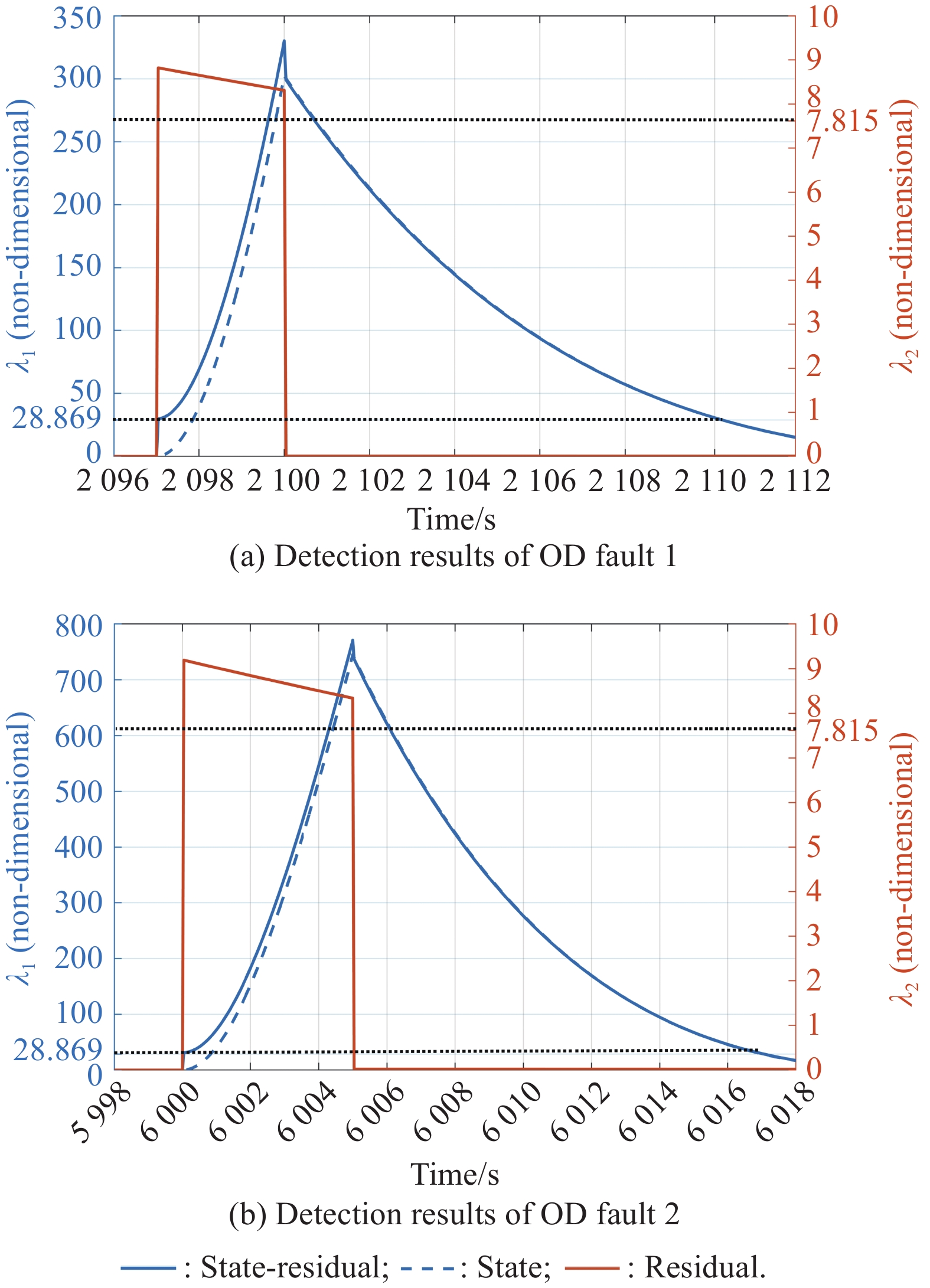
Table 3
Fault detection alarm time results"
| Sub-system | Fault type | Fault time/s | State detection alarm time/s | Residual detection alarm time/s | Residual-state detection alarm time/s |
| OD | Zero setting | ||||
| Uprush | |||||
| LDV | Zero setting |
Fig 12
Integrated navigation results without faults"
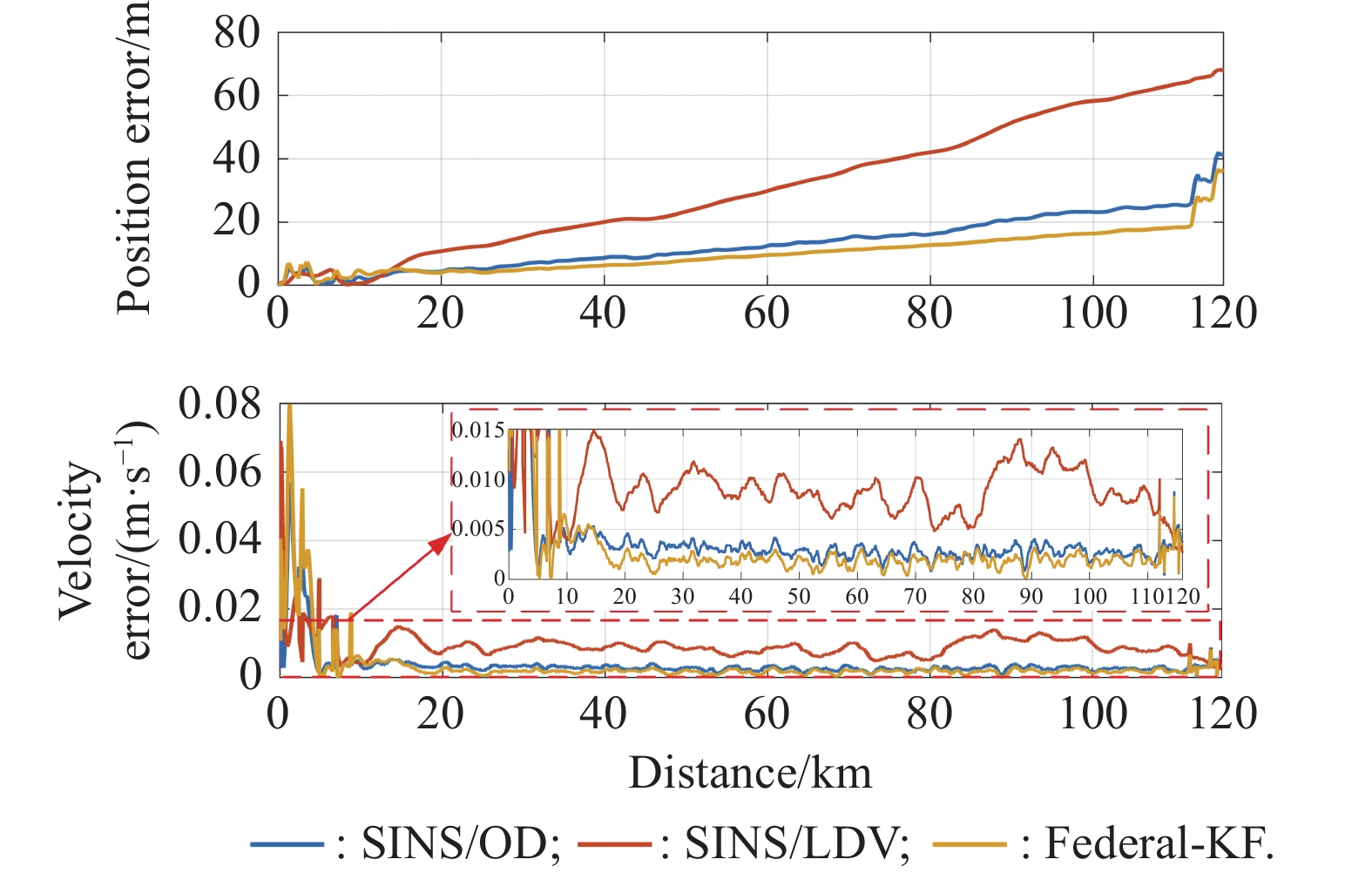
Fig 13
Integrated navigation results with faults"
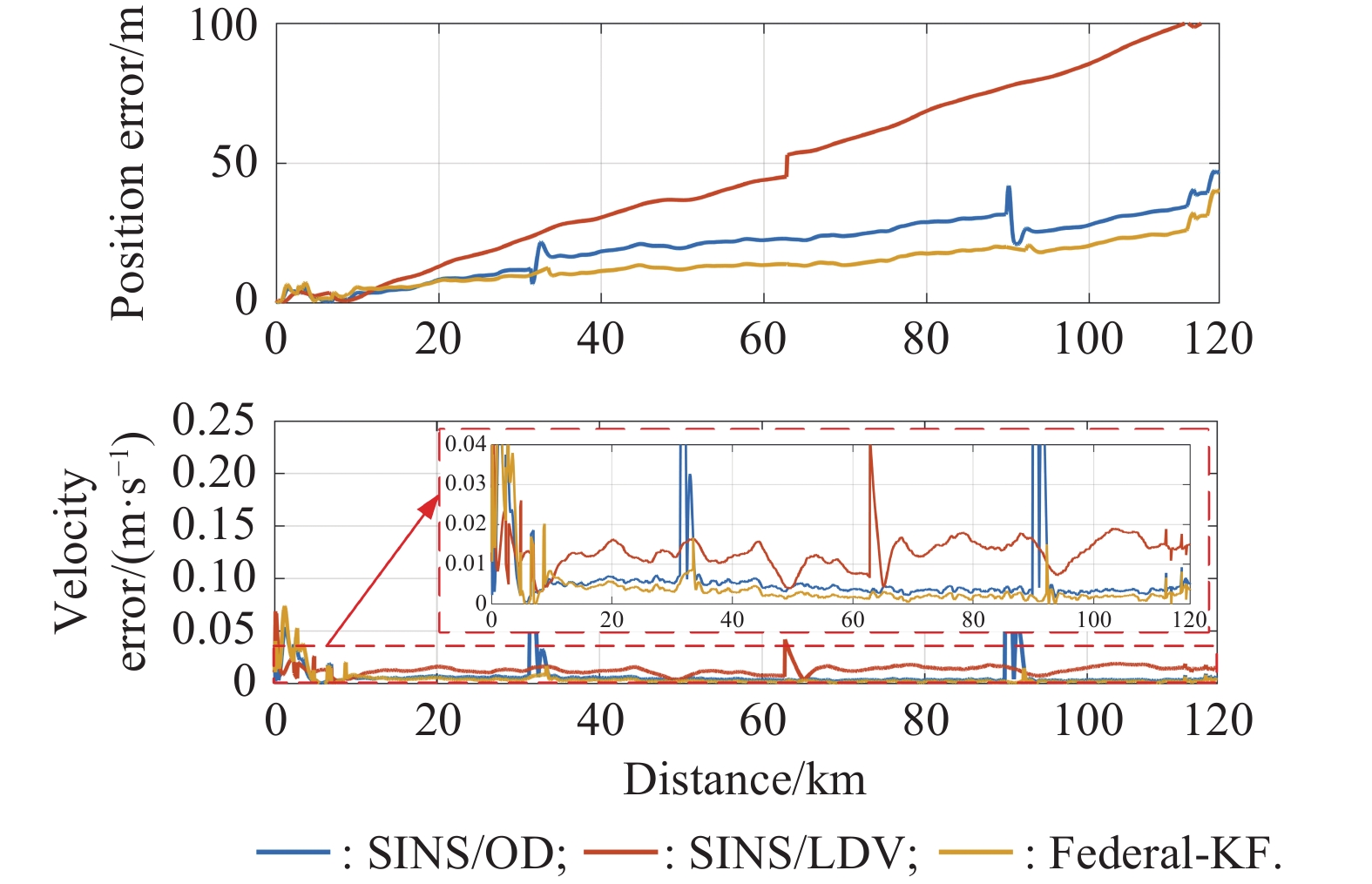
Table 4
Statistics of navigation results of simulation"
| Condition | Method | Position error/m/Velocity error/(m/s) | ||
| Mean | Max | Standrad | ||
| Without fault | SINS/OD | 13.49 / | 42.11 / | 8.70 / |
| SINS/LDV | 31.48 / | 68.06 / | 20.15 / | |
| FKF | 10.38 / | 36.82 / | 6.50 / | |
| With fault | SINS/OD | 20.59 / | 49.63 / | 10.62 / |
| SINS/LDV | 48.08 / | 104.15 / | 31.07 / | |
| FKF | 14.32 / | 42.72 / | 7.41 / | |
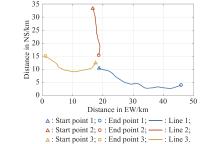
Fig 14
Experimental survey lines"
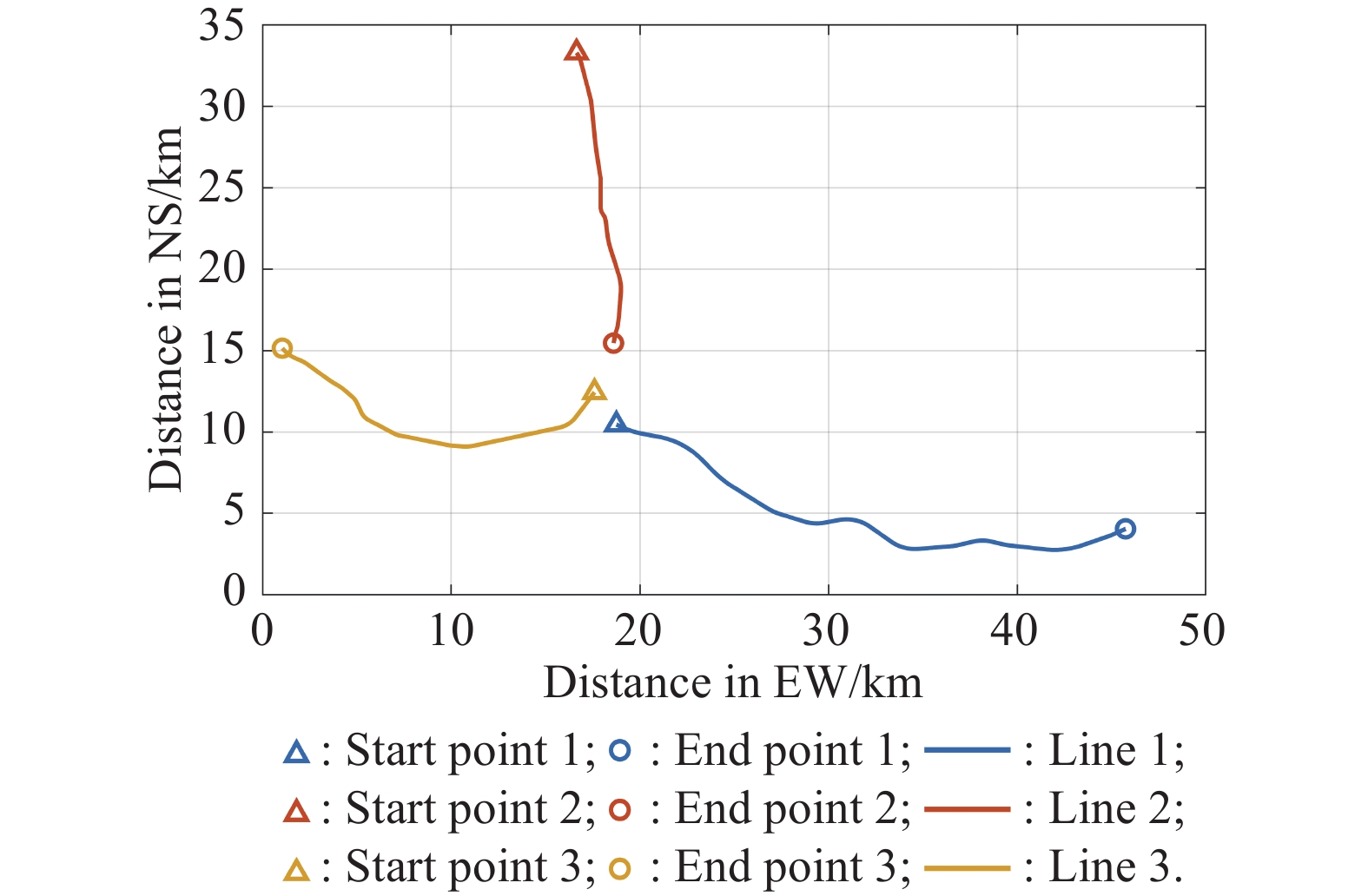

Fig 15
Experimental vehicle and equipment"

Table 5
Performance parameters of main equipment"
| Device | Sensor | Characteristic | Accuracy |
| Double axis laser SINS | Gyroscopes | Bias instability | |
| Random walk | |||
| Accelerometer | Bias stability | 10 μg/day | |
| Random walk | 5 μg/ | ||
| Gravimeter | Gravity sensor | Static output | ≤ 0.01 mGal |
| Temperature control | ≤ 0.001℃ | ||
| OD | Pulse counter | Counting error | 1×10−4 |
| Velocity error | 0.001 1 m/s | ||
| Barometer | Pressure sensor | Resolution | 5 Pa |
| Height error | 2.5 m | ||
| LDV | Dual optical drive | Velocity error | ≤ 1‰ |
| Location devices | Horizontal error | 5 cm | |
| Height error | 0.1 m | ||
| GPS | Velocity measuring devices | Horizontal error | 0.01 m/s |
| Height error | 0.02 m/s |
Fig 16
One-way positioning and velocity measurement error based on FKF on line 1"
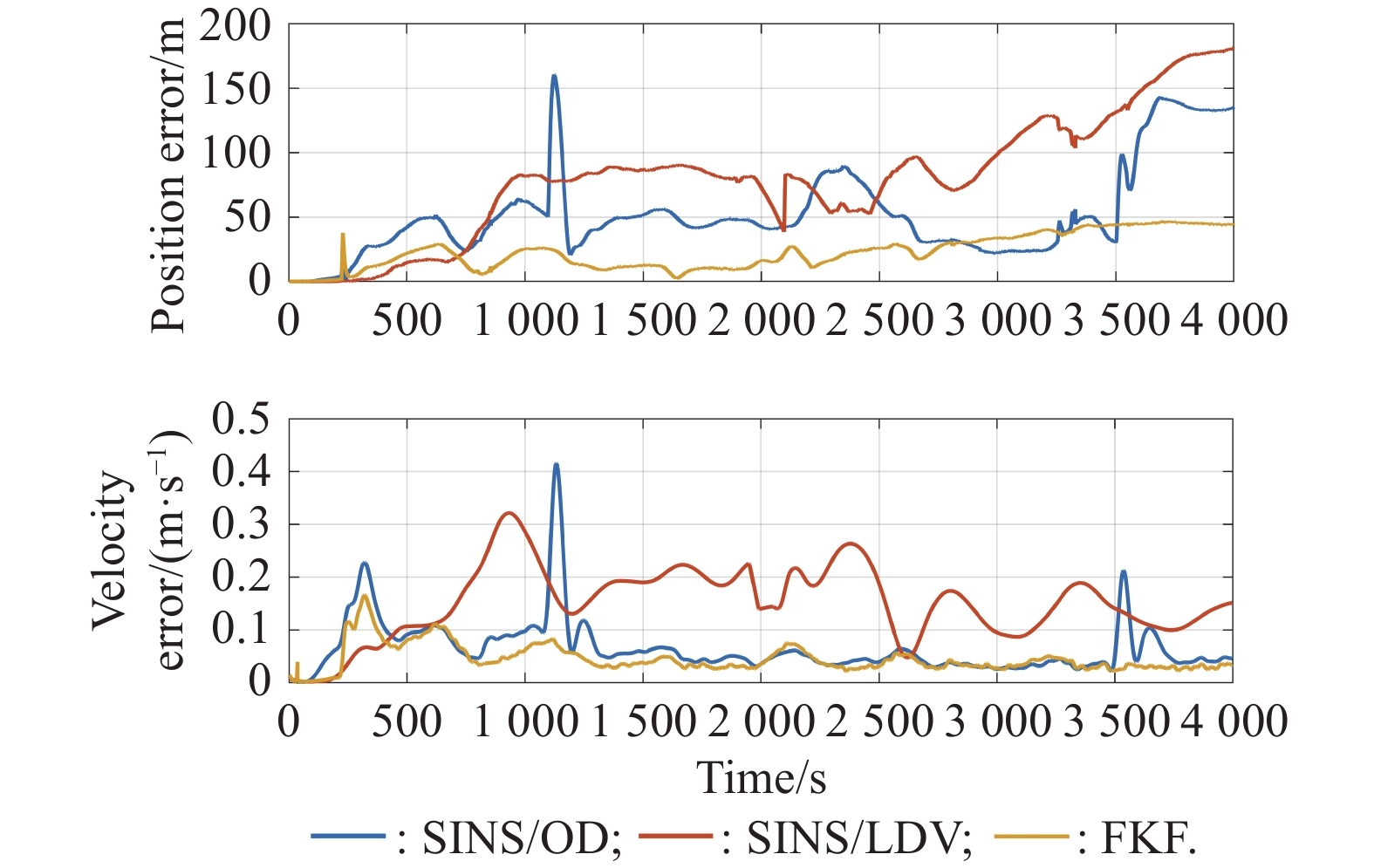
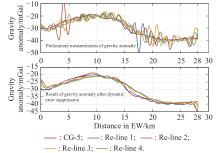
Fig 17
Gravimetry results of preliminary and after dynamic error suppression on line 1"
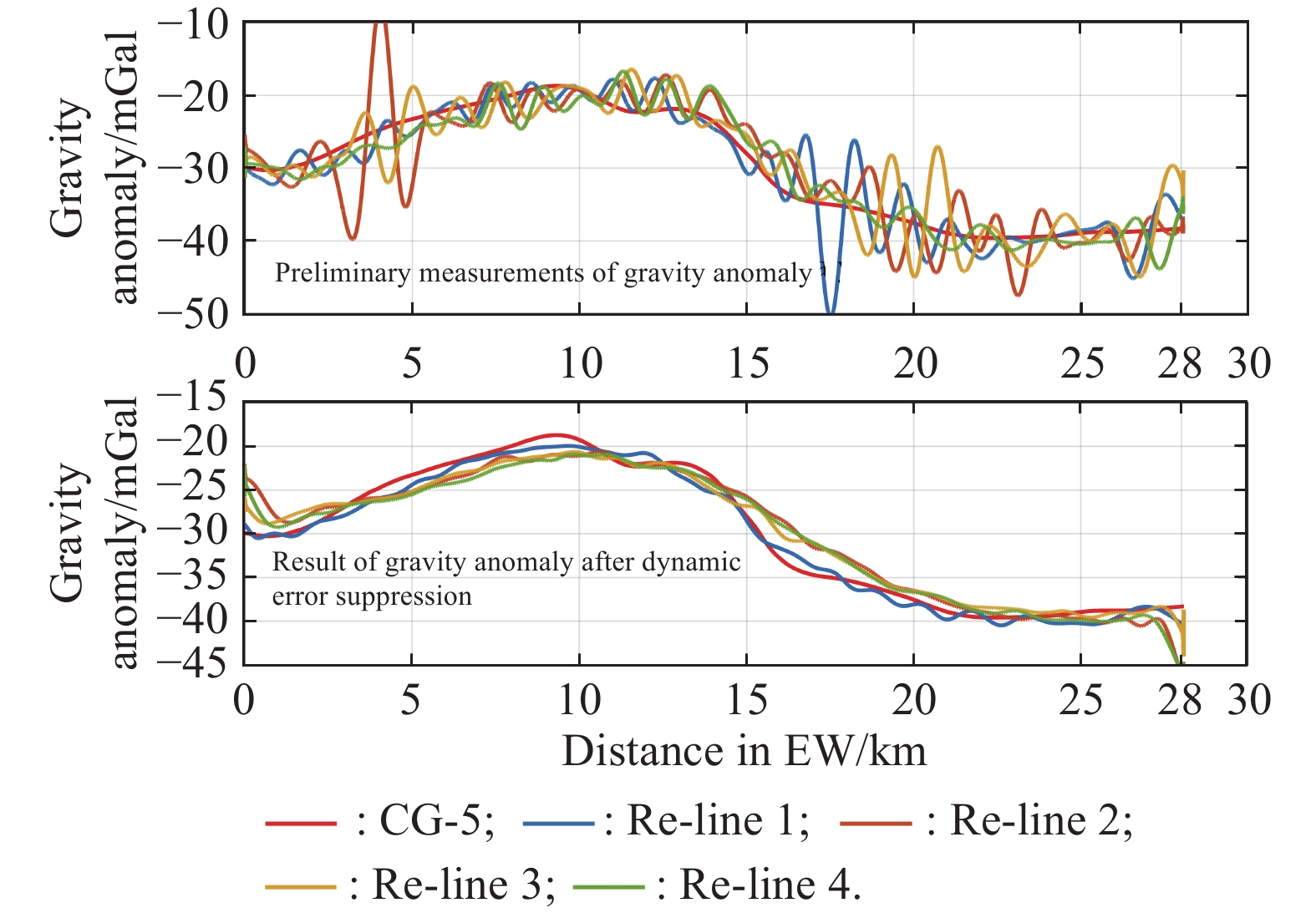
Fig 18
Gravimetry results of preliminary and after dynamic error suppression on line 2"
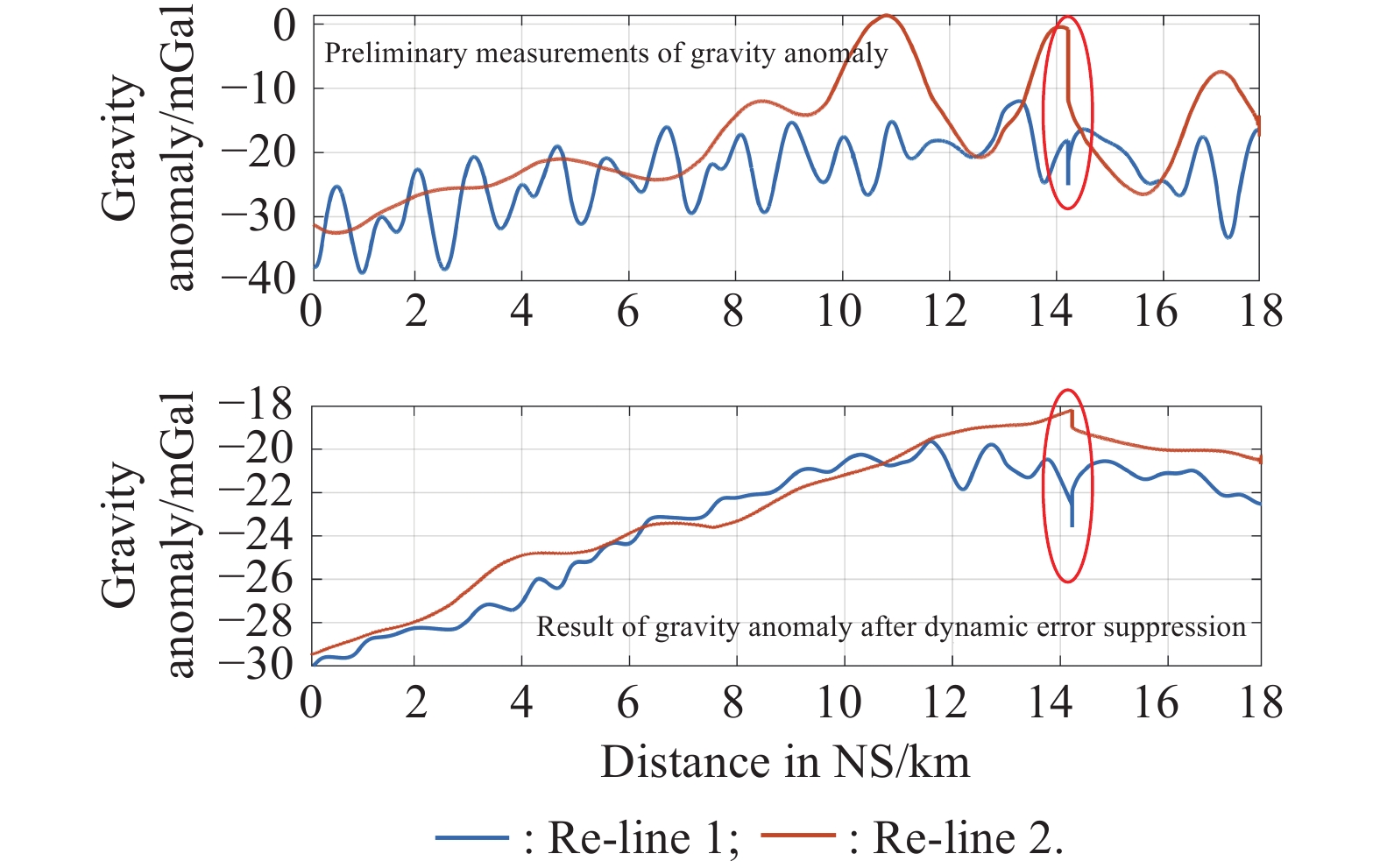
Fig 19
Gravimetry results of preliminary and after dynamic error suppression on line 3"
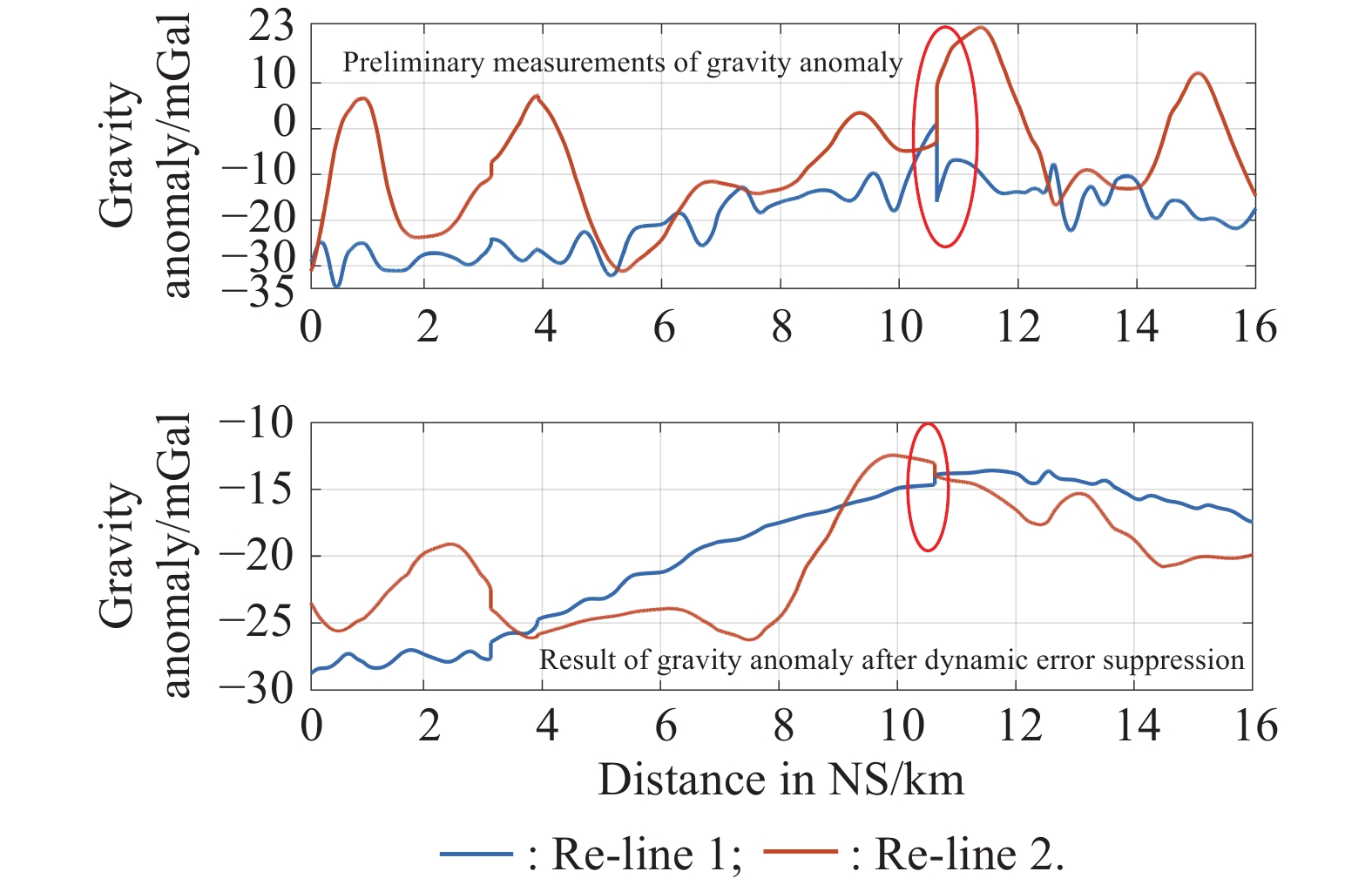
Table 6
Statistics of gravity measurement results and error suppression mGal"
| Survey lines | Metric | Accuracy | ||
| Before error suppression | After error suppression | Percentage/% | ||
| Line 1-1 | Internal coincidence | 2.61 | 1.14 | 56.3 |
| Line 1-2 | 3.24 | 0.84 | 74.1 | |
| Line 1-3 | 2.98 | 0.53 | 82.2 | |
| Line 1-4 | 1.83 | 0.57 | 68.9 | |
| Line 1 | 2.72 | 0.81 | 70.2 | |
| Line 1-1 | External coincidence | 3.10 | 0.92 | 70.3 |
| Line 1-2 | 4.07 | 2.03 | 50.1 | |
| Line 1-3 | 3.32 | 1.54 | 53.6 | |
| Line 1-4 | 2.17 | 1.93 | 11.1 | |
| Line 1 | 3.23 | 1.66 | 48.6 | |
| Line 2-1 | Internal coincidence | 4.92 | 1.27 | 74.2 |
| Line 2-2 | 4.94 | 1.33 | 73.1 | |
| Line 2 | 4.93 | 1.30 | 73.6 | |
| Line 3-1 | Internal coincidence | 8.61 | 1.92 | 77.7 |
| Line 3-2 | 8.93 | 1.96 | 78.1 | |
| Line 3 | 8.77 | 1.94 | 77.9 | |
| 1 | STRAY B, LAMB A, KAUSHIK A, et al Quantum sensing for gravity cartography. Nature, 2022, 602 (1): 590- 594. |
| 2 |
ZHU Y Q, YANG X, LIU F, et al Progress and prospect of the time-varying gravity in earthquake prediction in the Chinese mainland. Frontiers in Earth Science, 2023, 11, 1124573.
doi: 10.3389/feart.2023.1124573 |
| 3 | SUN H P, SUN W K, SHEN W B, et al Research progress of Earth’s gravity field and its application in geosciences. Advances in Earth Science, 2021, 36 (5): 445- 460. |
| 4 |
HAN Y R, WANG B, DENG Z H, et al Point mass filter based matching algorithm in gravity aided underwater navigation. Journal of Systems Engineering and Electronics, 2018, 29 (1): 152- 159.
doi: 10.21629/JSEE.2018.01.15 |
| 5 |
CARRIER A, NAWRATIL C B, LUPI M Affordable gravity prospection calibrated on improved time-to-depth conversion of old seismic profiles for exploration of geothermal resources. Geothermics, 2020, 86, 101800.
doi: 10.1016/j.geothermics.2020.101800 |
| 6 | HAO S W, ZHANG Z L, ZHOU Z F, et al Influence of gravity disturbance on initial alignment of inertial navigation system. Systems Engineering and Electronics, 2020, 42 (7): 1575- 1581. |
| 7 | HAO S W, ZHANG Z L, ZHOU Z F, et al Calculation method for deflection of the vertical based on path gravity anomaly compensation. Measurement Science and Technology, 2023, 34 (3): 12- 23. |
| 8 | LI X P, JEKELI C Ground-vehicle INS/ GPS vector gravimetry. Geophysics, 2008, 73 (2): 1- 10. |
| 9 |
YU R H, WU M P, ZHANG K D, et al A new method for land vehicle gravimetry using SINS/VEL. Sensors, 2017, 17 (4): 766- 777.
doi: 10.3390/s17040766 |
| 10 | WEI G, YANG Z K, GAO C F, et al Strapdown vehicle autonomous gravimetry method based on two dimensional laser Doppler velocimeter. Infrared and Laser Engineering, 2023, 52 (6): 339- 346. |
| 11 | CAI S K, CAO J L, YU R H, et al Dynamic error elimination method for strapdown dynamic gravimetry. IEEE Geoscience and Remote Sensing Letters, 2022, 19 (1): 8027405. |
| 12 | HUANG M T, CHEN X, DENG K L, et al A general model for compensating remainder dynamic environment effect on marine and airborne gravimetry. Acta Geodaetica et Cartographica Sinica, 2020, 49 (2): 135- 146. |
| 13 | PAN G W, YU R H, XIONG Z M, et al Strapdown vehicle gravimetry nonmodel error compensation method. IEEE Geoscience and Remote Sensing Letters, 2023, 20 (1): 7500405. |
| 14 | ZOU X L, CAI S K, WU M P, et al Dynamic errors separation of airborne gravimetry based on empirical mode decomposition. Geophysical and Geo-chemical Exploration, 2016, 40 (6): 1217- 1221. |
| 15 | ZHAO X M, GAO W, LI D, et al Realization and application of inertial navigation platform gravity measurement technology. Navigation Positioning and Timing, 2020, 7 (2): 11- 17. |
| 16 | CAI T J, YAN Y, WANG X Y Kalman filtering of strapdown airborne gravity measurement. Piezoelectrics and Acoustooptics, 2019, 41 (3): 436- 439. |
| 17 | ZHENG W, ZHANG G B Application research on adaptive Kalman filtering for airborne gravity anomaly determination. Chinese Journal of Geophysics, 2016, 59 (4): 1275- 1283. |
| 18 | CHA F, TAN F J, LI F, et al A fast damping algorithm for INS with external velocity reference. Geomatics and Information Science of Wuhan University, 2019, 44 (3): 398- 404. |
| 19 | ZHANG J, LU J L, XIN Y K, et al. Horizon alignment method introducing external velocity for laser gyro compass. Ship Electronic Engineering, 2016, 36(12): 61−66. |
| 20 | ZHAO L, LI J S, CHENG J H Double-filter external damping strapdown inertial navigation algorithm. Journal of Harbin Institute of Technology, 2018, 50 (3): 178- 184. |
| 21 | LI D Y, TAN F J, HUANG C F, et al Inertial navigation autonomous damping algorithm based on LM algorithm. Transducer and Microsystem Technologies, 2023, 42 (6): 112- 115. |
| 22 |
WU P F, WU L, BAO L F, et al A marine gravimeter based on electromagnetic damping and its tests in the South China Sea. Journal of Oceanology and Limnology, 2023, 41 (2): 792- 803.
doi: 10.1007/s00343-022-2110-5 |
| 23 |
WEI S, DAN G, CHEN H Altitude data fusion utilising differential measurement and complementary filter. IET Science, Measurement and Technology, 2016, 10 (8): 874- 879.
doi: 10.1049/iet-smt.2016.0118 |
| 24 |
KWON J H, JEKELI C The effect of stochastic gravity models in airborne vector gravimetry. Geophysics, 2002, 67 (3): 770- 776.
doi: 10.1190/1.1484520 |
| 25 | FANG G Q, WU H Y The damp inertial navigation system under the outside speed compensation. Ship Science and Technology, 2013, 35 (5): 62- 64. |
| 26 | TAN F J, LI A, XU J N, et al Horizontal inner damping method with continuously adjustable parameter for inertial navigation system. Journal of Chinese Inertial Technology, 2011, 19 (3): 290- 293. |
| 27 |
XIONG Z M, CAO J L, LIAO K X, et al A new method for underwater dynamic gravimetry based on multisensory integrated navigation. Geophysics, 2020, 85 (3): 69- 80.
doi: 10.1190/geo2019-0006.1 |
| 28 | CARLSON N A Federated filter for fault-tolerant integrated navigation systems. IEEE Position Location and Navigation Symposium, 1988, 88 (7): 110- 119. |
| 29 |
YANG B, XUE L, FAN H D, et al SINS/Odometer/Doppler radar high-precision integrated navigation method for land vehicle. IEEE Sensors Journal, 2021, 21 (13): 15090- 15100.
doi: 10.1109/JSEN.2021.3071181 |
| 30 |
YANG B, LIU F, XUE L, et al Fault-tolerant SINS/Doppler radar/odometer integrated navigation method based on two-stage fault detection structure. Entropy, 2023, 25 (10): 1412- 1430.
doi: 10.3390/e25101412 |
| [1] | Hui Sun, Jianguo Yan, Yaohong Qu, and Jie Ren. Sensor fault-tolerant observer applied in UAV anti-skid braking control under control input constraint [J]. Systems Engineering and Electronics, 2017, 28(1): 126-. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||