
Journal of Systems Engineering and Electronics ›› 2025, Vol. 36 ›› Issue (5): 1342-1352.doi: 10.23919/JSEE.2025.000087
• CONTROL THEORY AND APPLICATION • Previous Articles
Zhenlin ZHOU1,2( ), Teng LONG1,2,3,*(), Jingliang SUN1,2,3(), Junzhi LI1,2()
), Teng LONG1,2,3,*(), Jingliang SUN1,2,3(), Junzhi LI1,2()
Received:2024-05-06
Online:2025-10-18
Published:2025-10-24
Contact:
Teng LONG
E-mail:bit_zzl@sina.com;tenglong@bit.edu.cn;sunjingliangac@163.com;junzhi_lee@163.com
About author:Supported by:Zhenlin ZHOU, Teng LONG, Jingliang SUN, Junzhi LI. Hierarchical cooperative path planning method using three-dimensional velocity-obstacle strategy for multiple fixed-wing UAVs[J]. Journal of Systems Engineering and Electronics, 2025, 36(5): 1342-1352.

Fig 1
Four Dubins schemes that include a straight section"
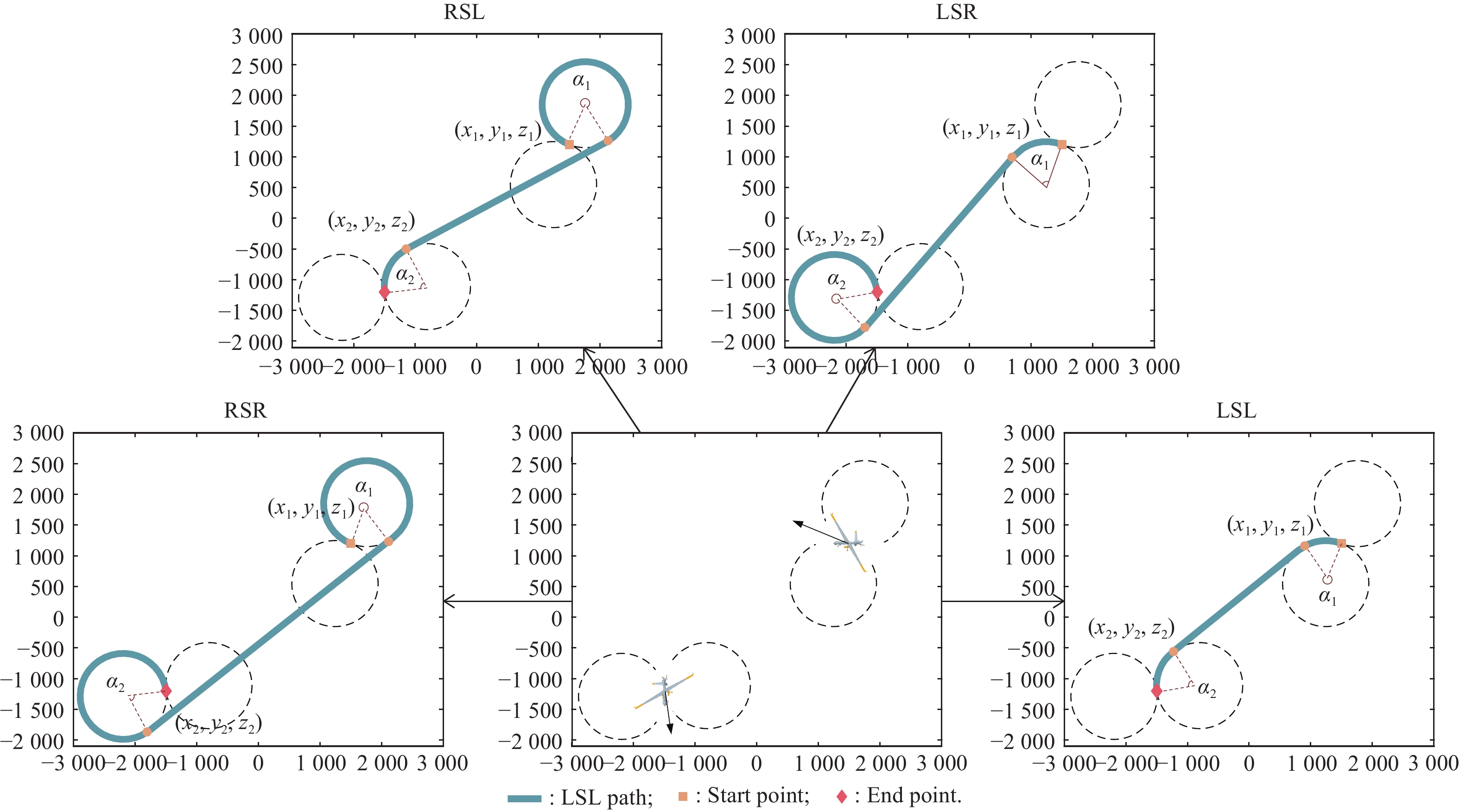
Fig 2
Collision cone set generation from two fixed-wing UAVs"
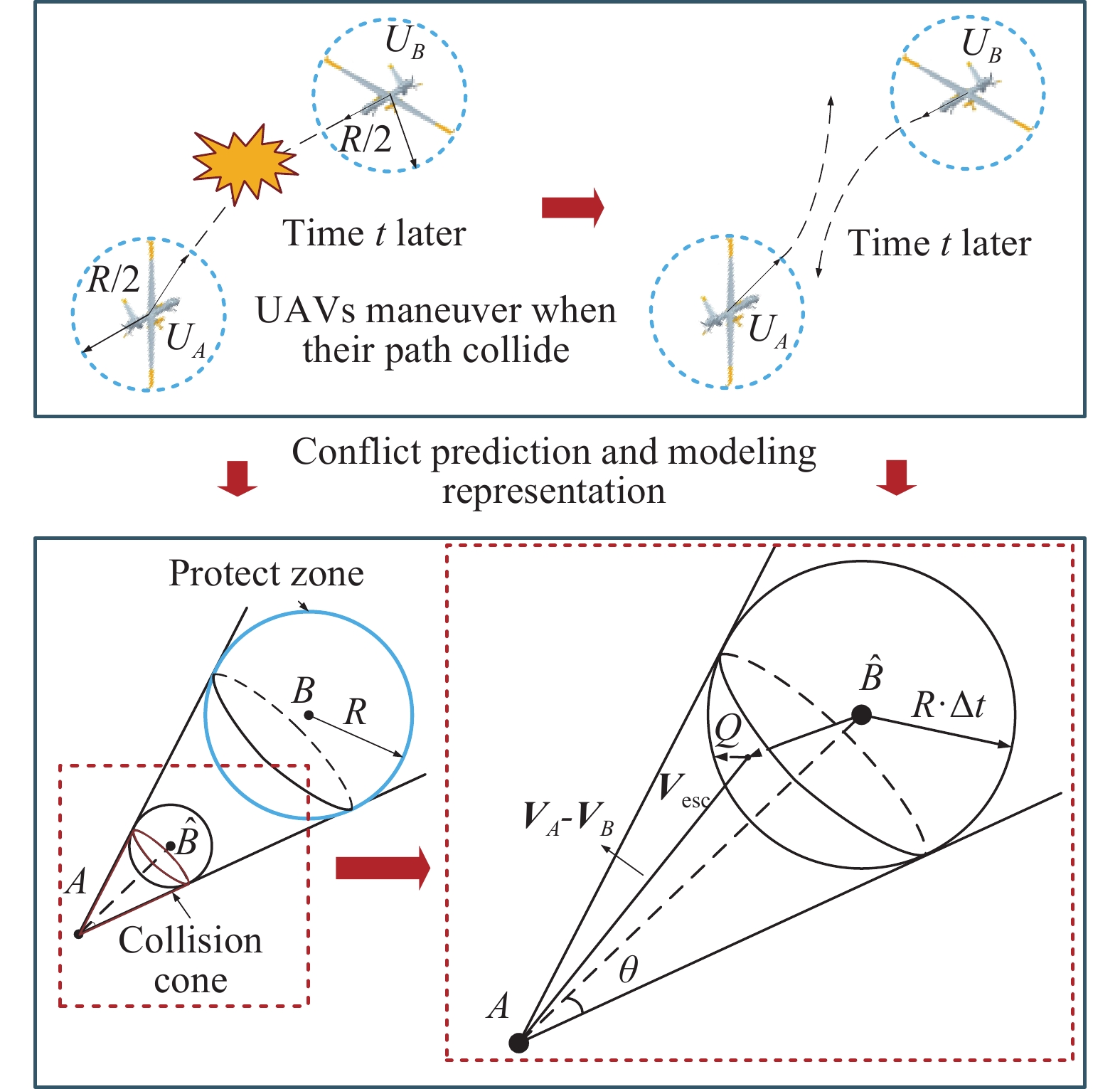

Fig 3
Intersection of optimal velocity space"
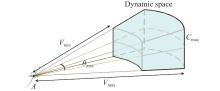
Fig 4
Dynamic space under the limitation of dynamic constraints"
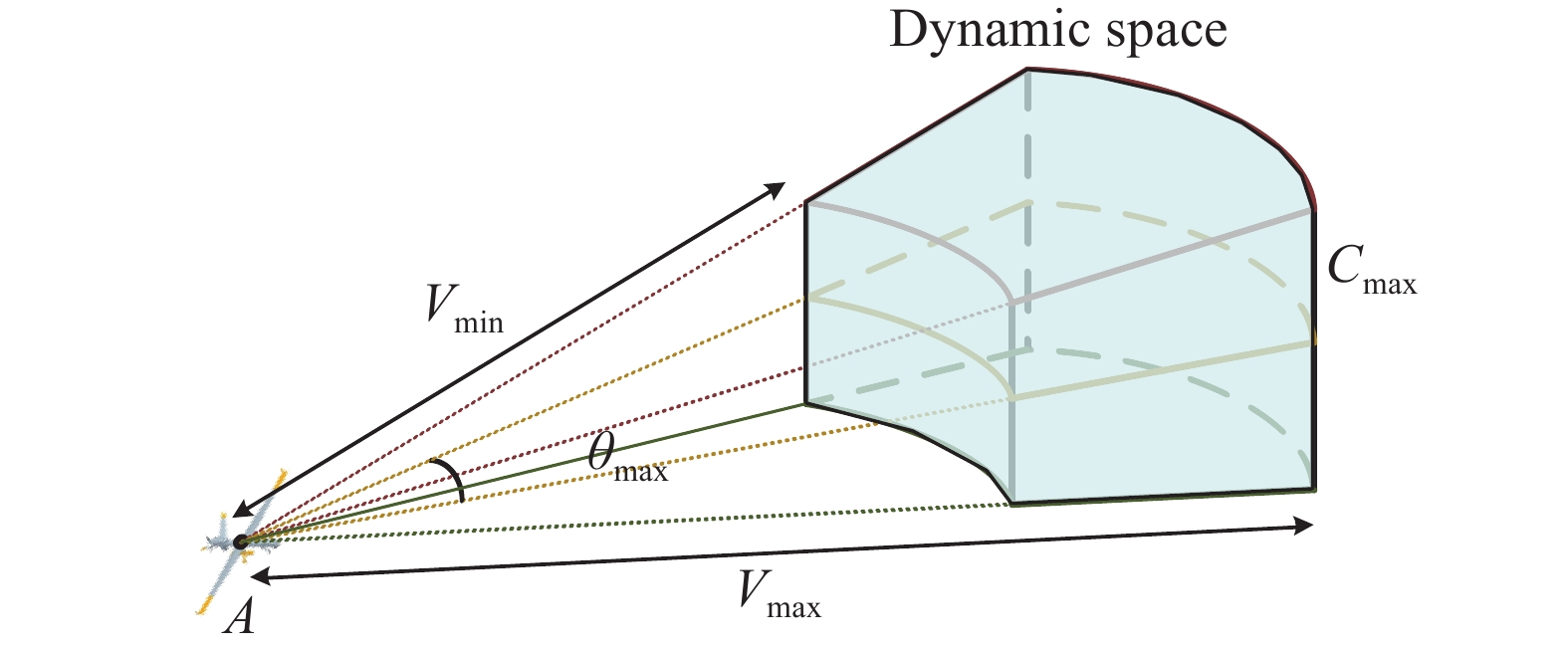
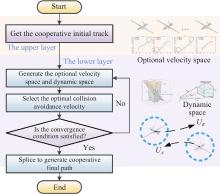
Fig 5
Flowchart of hierarchical cooperative path planning algorithm"
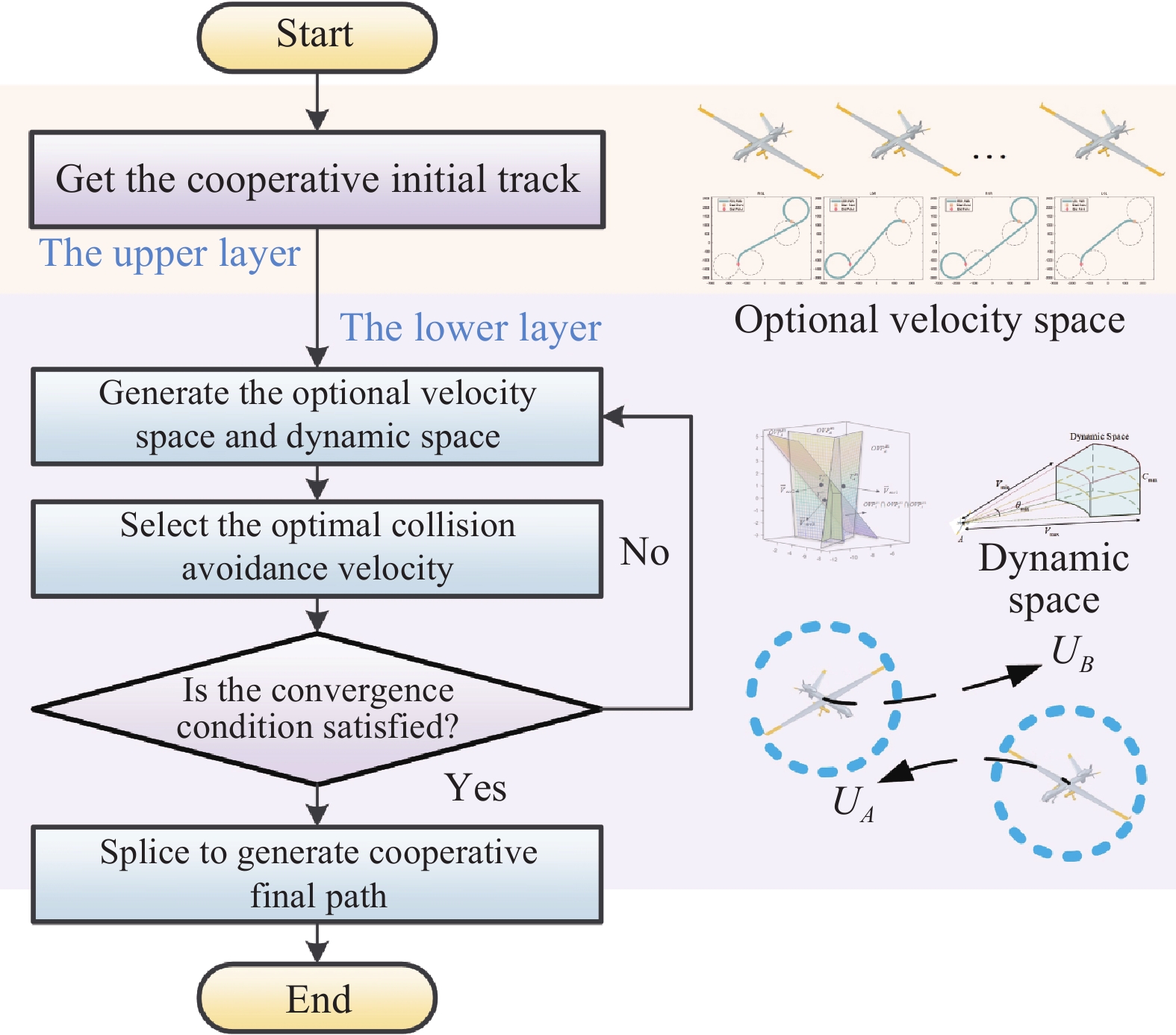
Table 1
Value of parameters in the hedge scenario m"
| Number | Start point | Terminal point |
| 1 | (800, 0, 0) | (−800, 0, 0) |
| 2 | (566,566,0) | (−566,−566,0) |
| 3 | (0, 800, 0) | (0, −800, 0) |
| 4 | (−566,566,0) | (566,−566,0) |
| 5 | (−800,0,0) | (800,0,0) |
| 6 | (−566,−566,0) | (566,566,0) |
| 7 | (0,800,0) | (0,−800,0) |
| 8 | (566,−566,0) | (−566,566,0) |

Fig 6
Simulation of converging encounters and the avoidance solutions using hierarchical cooperative path planning method"
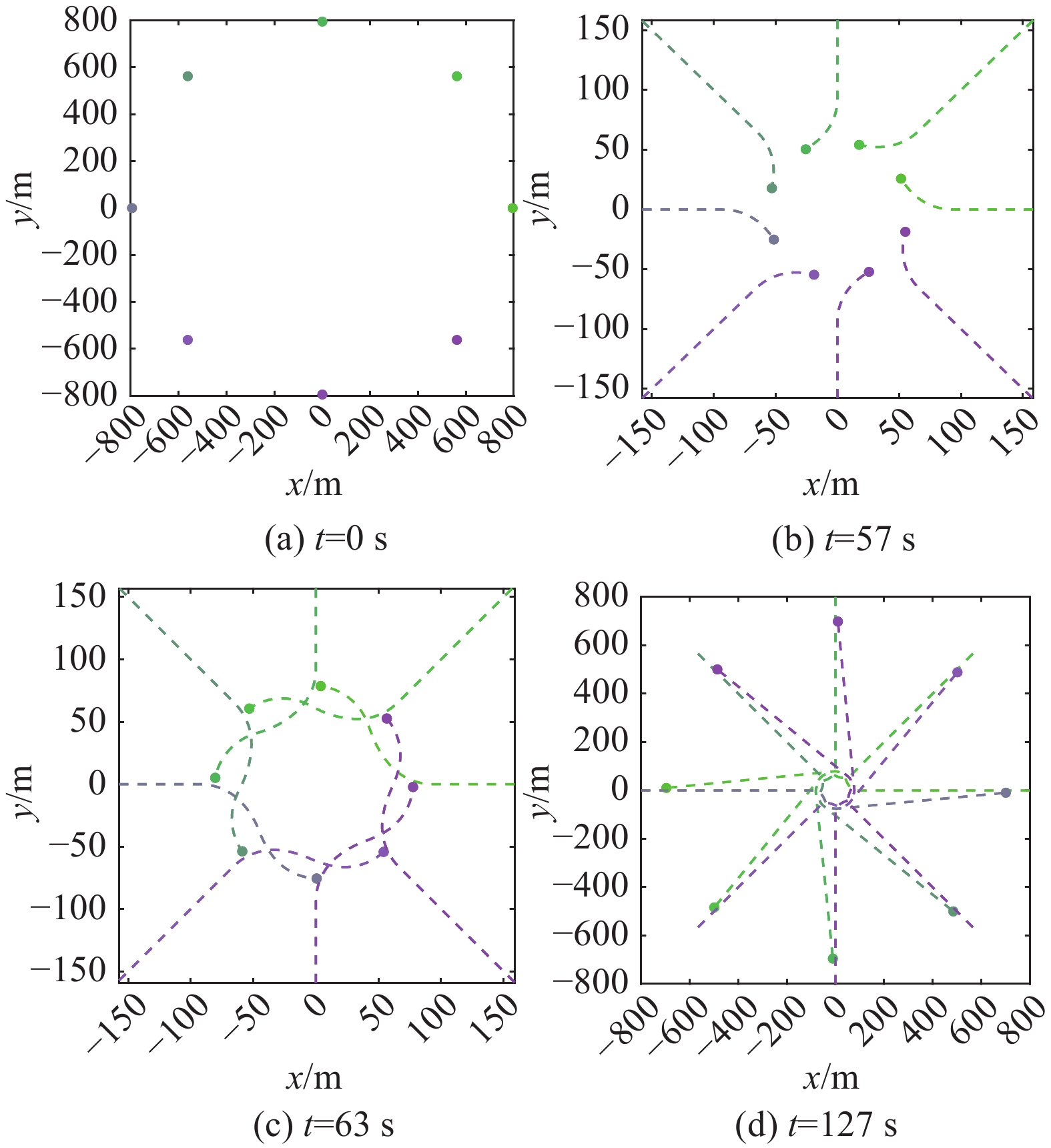
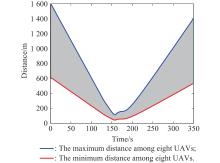
Fig 7
The minimum and maximum distances among eight UAVs at different time"
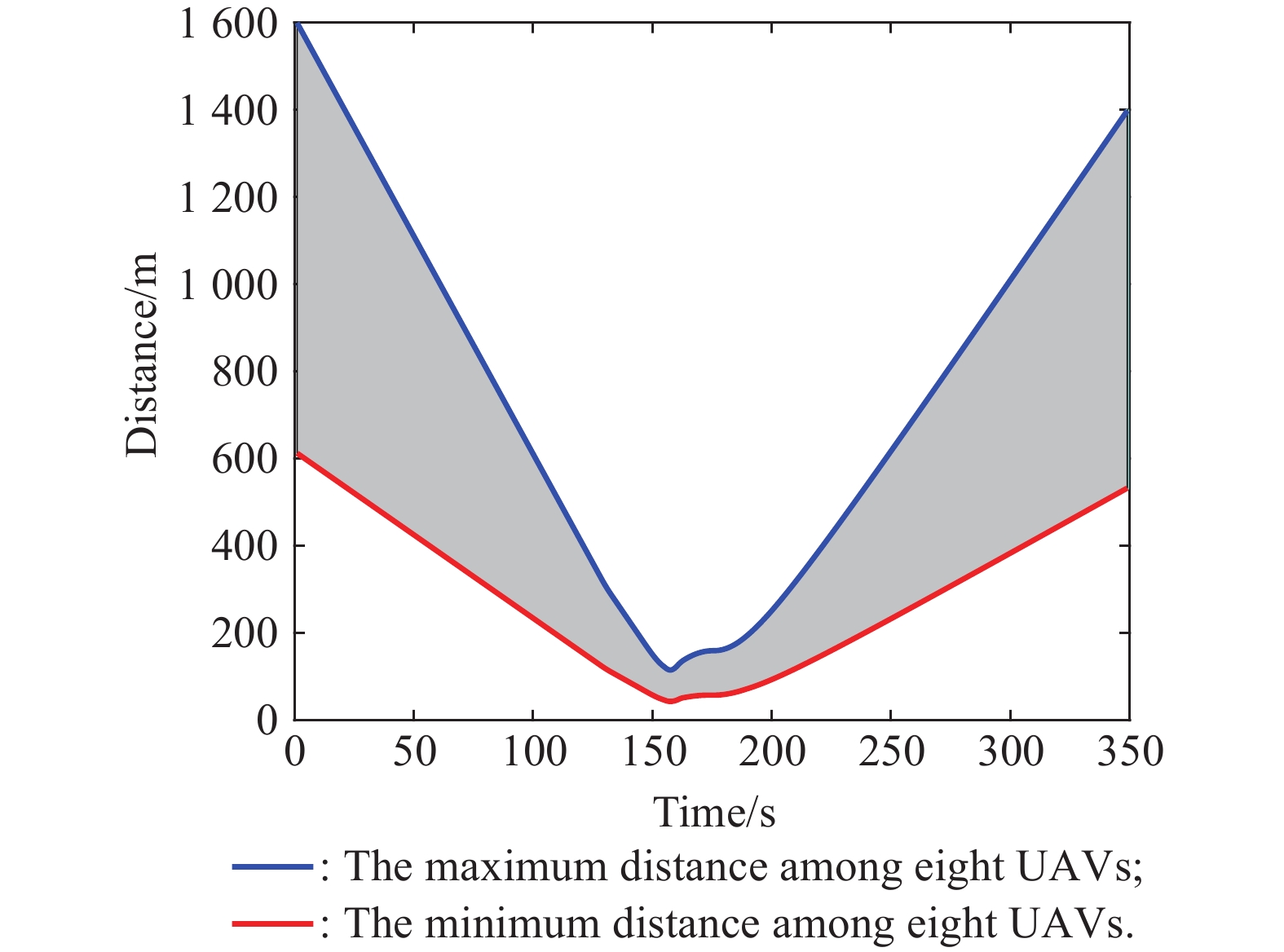
Table 2
Value of parameters in the hedge scenario m"
| Number | Start point | Terminal point | Number | Start point | Terminal point | Number | Start point | Terminal point | ||
| 1 | (800,0,50) | (−800,0,−50) | 18 | (−429,675,41) | (429,−675,−41) | 35 | (−341,−724,67) | (341,724,−67) | ||
| 2 | (794,100,49) | (−794,−100,−49) | 19 | (−510,616,59) | (510,−616,−59) | 36 | (−247,−761,32) | (247,761,−32) | ||
| 3 | (775,199,51) | (−775,−199,−51) | 20 | (−583,548,40) | (583,−548,−40) | 37 | (−150,−786,68) | (150,786,−68) | ||
| 4 | (744,295,48) | (−744,−295,−48) | 21 | (−647,470,60) | (647,−470,−60) | 38 | (−50,−798,31) | (50,798,−31) | ||
| 5 | (701,385,52) | (−701,−385,−52) | 22 | (−701,385,39) | (701,−385,−39) | 39 | (50,−798,69) | (−50,798,−69) | ||
| 6 | (647,470,47) | (−647,−470,−47) | 23 | (−744,295,61) | (744,−295,−61) | 40 | (150,−786,30) | (−150,786,−30) | ||
| 7 | (583,548,53) | (−583,−548,−53) | 24 | (−775,199,38) | (775,−199,−38) | 41 | (247,−761,70) | (−247,761,−70) | ||
| 8 | (510,616,46) | (−510,−616,−46) | 25 | (−794,100,62) | (794,−100,−62) | 42 | (341,−724,29) | (−341,724,−29) | ||
| 9 | (429,675,54) | (−429,−675,−54) | 26 | (−800,0,37) | (800,0,−37) | 43 | (429,−675,71) | (−429,675,−71) | ||
| 10 | (341,724,45) | (−341,−724,−45) | 27 | (−794,−100,63) | (794,100,−63) | 44 | (510,−616,28) | (−510,616,−28) | ||
| 11 | (247,761,55) | (−247,−761,−55) | 28 | (−775,−199,36) | (775,199,−36) | 45 | (583,−548,72) | (−583,548,−72) | ||
| 12 | (150,786,44) | (−150,−786,−44) | 29 | (−744,−295,64) | (744,295,−64) | 46 | (647,−470,27) | (−647,470,−27) | ||
| 13 | (50,798,56) | (−50,−798,−56) | 30 | (−701,−385,35) | (701,385,−35) | 47 | (701,−385,73) | (−701,385,−73) | ||
| 14 | (−50,798,43) | (50,−798,−43) | 31 | (−647,−470,65) | (647,470,−65) | 48 | (744,−295,26) | (−744,295,−26) | ||
| 15 | (−150,786,57) | (150,−786,−57) | 32 | (−583,−548,34) | (583,548,−34) | 49 | (775,−199,74) | (−775, 199,−74) | ||
| 16 | (−247,761,42) | (247,−761,−42) | 33 | (−510,−616,66) | (510,616,−66) | 50 | (794,−100,25) | (−794,100,−25) | ||
| 17 | (−341,724,58) | (341,−724,−58) | 34 | (−429,−675,33) | (429,675,−33) | − | − | − |
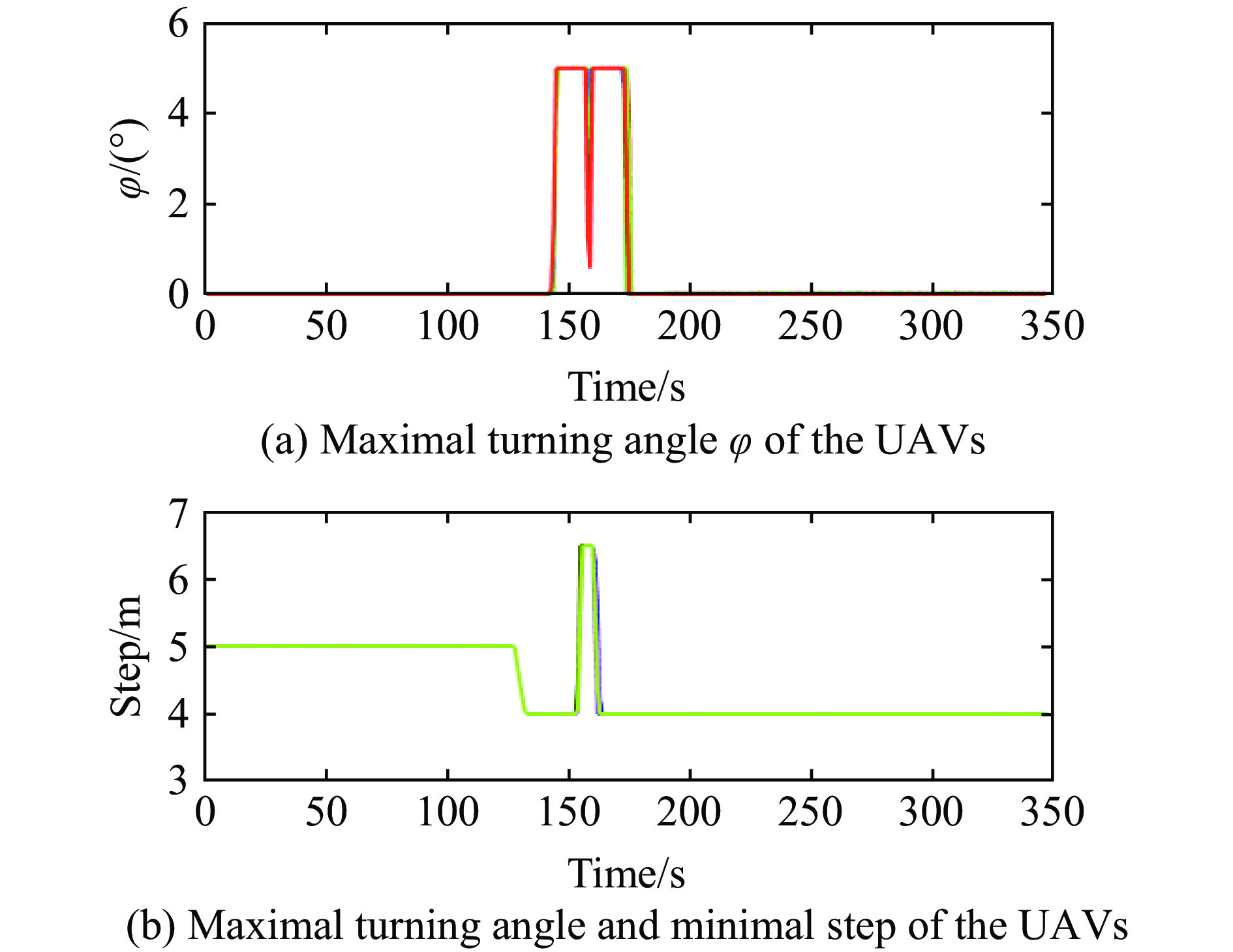
Fig 8
Maximal turning angle and minimal step of the UAVs"

Fig 9
Schematic diagram of path planning for Scenario II of assembly mission"
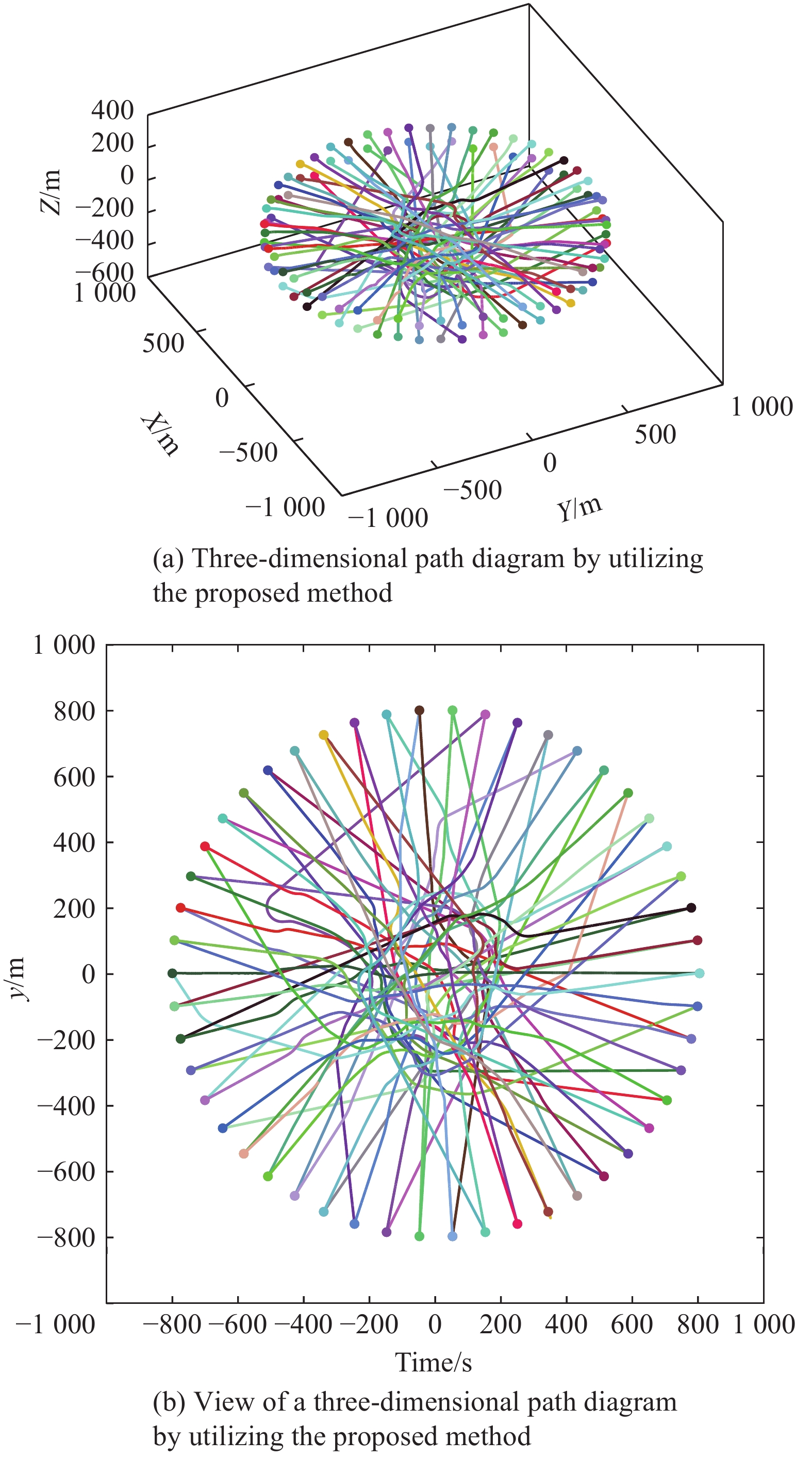
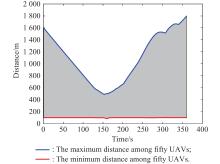
Fig 10
The minimum and maximum distances among fifty UAVs at different time"
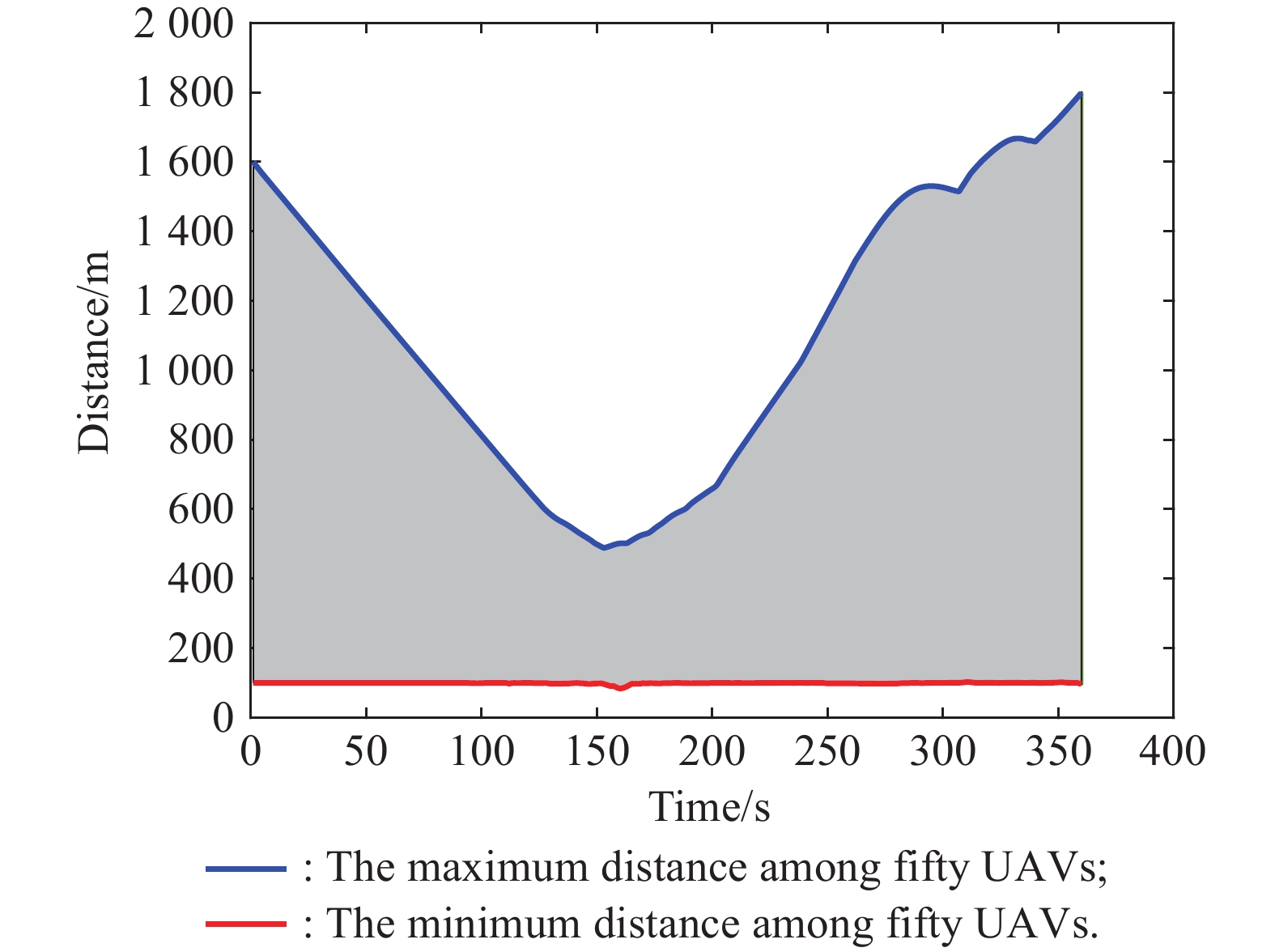
Fig 11
Maximum turning angle and minimum step of the UAVs"
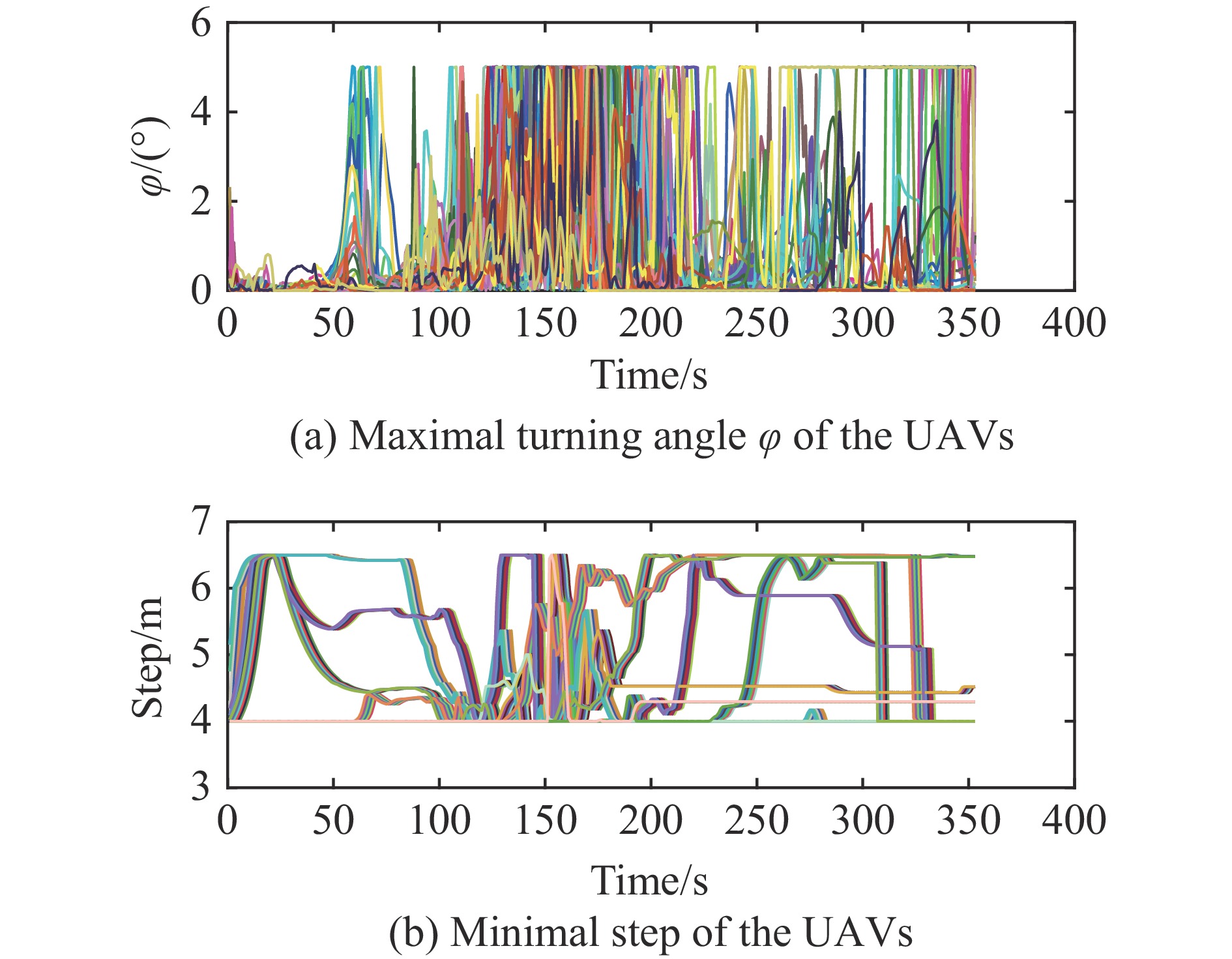

Fig 12
Average voyage per UAV for 3DVO and 3DSAS with different scales"
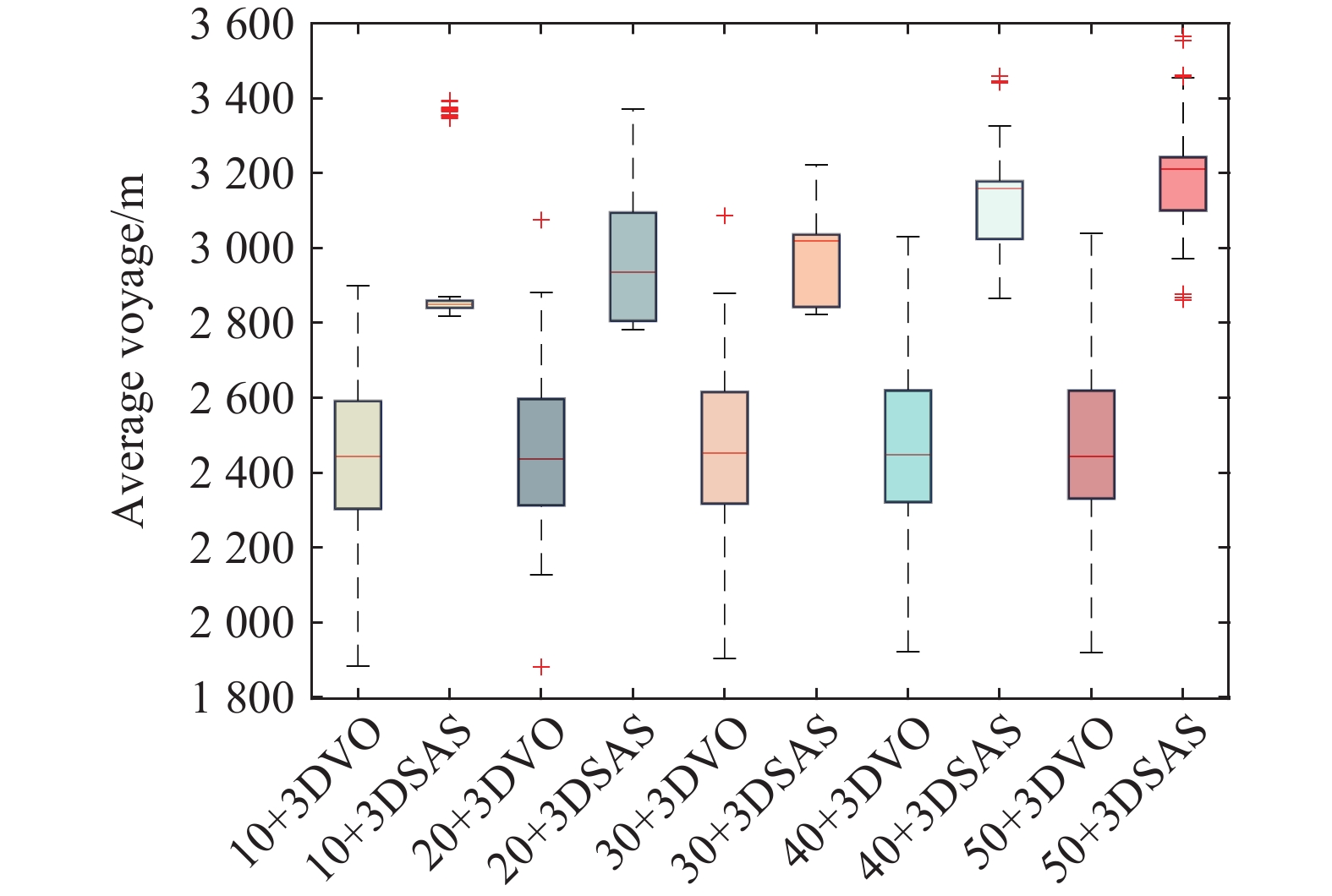

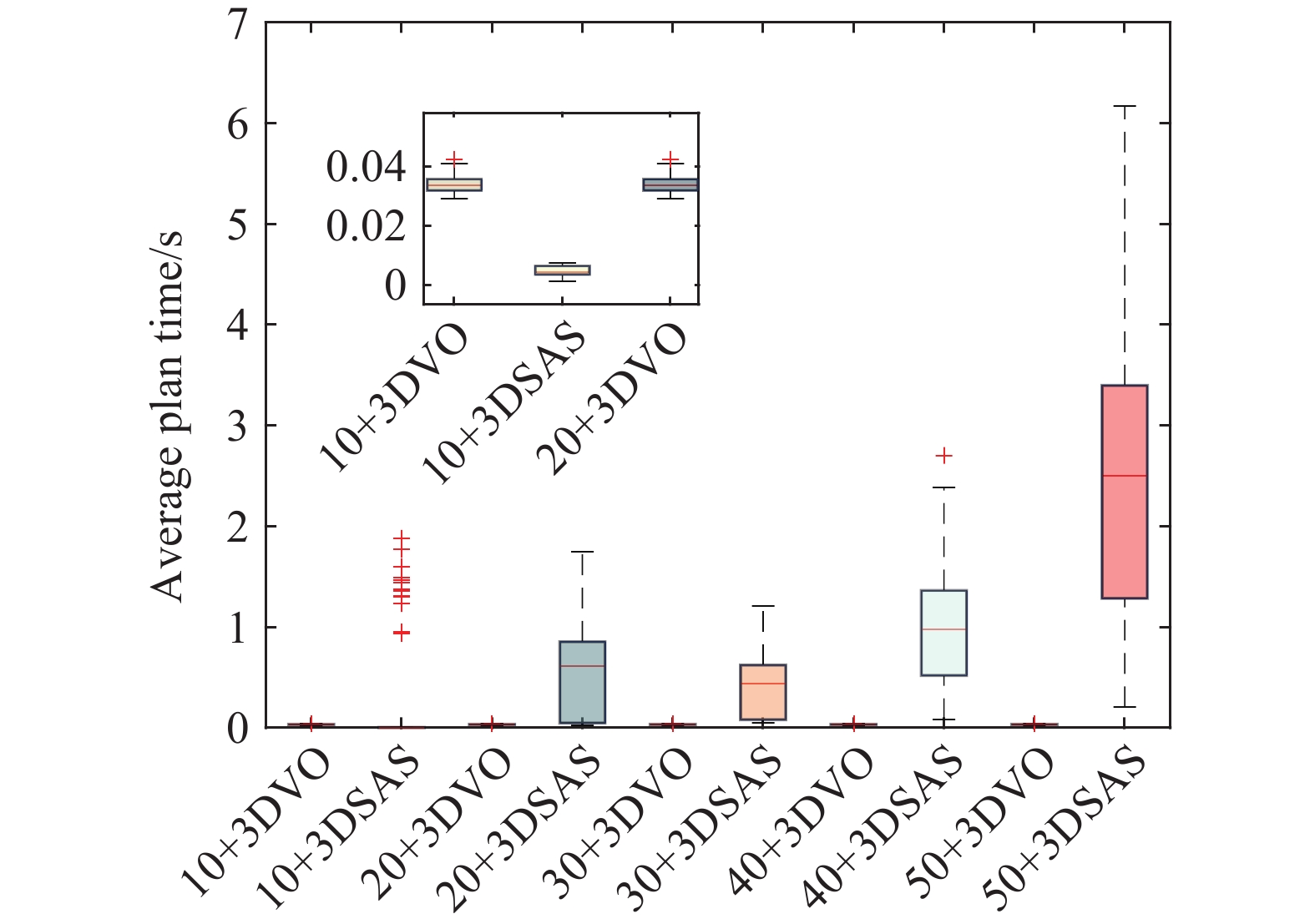
Fig 13
Average planning time per UAV for 3DVO and 3DSAS with different scales"
| 1 |
CHUNG S J, PARANJAPE A A, DAMES P, et al A survey on aerial swarm robotics. IEEE Trans. on Robotics, 2018, 34 (4): 837- 855.
doi: 10.1109/TRO.2018.2861318 |
| 2 |
LIU Z S, GUO M, BAO W M, et al Fast and adaptive multi-agent planning under collaborative temporal logic tasks via poset products. Research, 2024, 7, 0337.
doi: 10.34133/research.0337 |
| 3 |
ZHANG J D, GUO Y K, ZHENG L H, et al Real-time UAV path planning based on LSTM network. Journal of Systems Engineering and Electronics, 2024, 35 (2): 374- 385.
doi: 10.23919/JSEE.2023.000157 |
| 4 |
ZHANG J C, AN Y Q, CAO J N, et al UAV trajectory planning for complex open storage environments based on an improved RRT algorithm. IEEE Access, 2023, 11, 23189- 23204.
doi: 10.1109/ACCESS.2023.3252018 |
| 5 | ZHAO J M, HE H Z, WANG S Q, et al Joint trajectory planning for multiple UAVs target tracking and obstacle avoidance in a complicated environment. Acta Armamentarii, 2023, 44 (9): 2685- 2696. |
| 6 |
GU J J, SU T, WANG Q H, et al Multiple moving targets surveillance based on a cooperative network for multi-UAV. IEEE Communications Magazine, 2018, 56 (4): 82- 89.
doi: 10.1109/MCOM.2018.1700422 |
| 7 |
HU W J, YU Y, LIU S M, et al Multi-UAV coverage path planning: a distributed online cooperation method. IEEE Trans. on Vehicular Technology, 2023, 72 (9): 11727- 11740.
doi: 10.1109/TVT.2023.3303277 |
| 8 |
SUN C, LIU Y C, DAI R, et al Two approaches for path planning of unmanned aerial vehicles with avoidance zones. Journal of Guidance, Control, and Dynamics, 2017, 40 (8): 2076- 2083.
doi: 10.2514/1.G002314 |
| 9 |
ZHENG D, ZHANG Y F, LI F, et al UAVs cooperative task assignment and trajectory optimization with safety and time constraints. Defence Technology, 2023, 20, 149- 161.
doi: 10.1016/j.dt.2022.01.011 |
| 10 |
ZHANG J, CUI Y N, REN J Dynamic mission planning algorithm for UAV formation in battlefield environment. IEEE Trans. on Aerospace and Electronic Systems, 2023, 59 (4): 3750- 3765.
doi: 10.1109/TAES.2022.3231244 |
| 11 | OH H, KIM S, SHIN H S, et al. Coordinated standoff tracking of moving target groups using multiple UAVs. IEEE Trans. on Aerospace & Electronic Systems, 2015, 51(2): 1501−1504. |
| 12 |
UPADHYAY S, RATNOO A Smooth path planning for unmanned aerial vehicles with airspace restrictions. Journal of Guidance, Control, and Dynamics, 2017, 40 (7): 1596- 1612.
doi: 10.2514/1.G002400 |
| 13 |
LUO J, LIANG Q C, LI H UAV penetration mission path planning based on improved holonic particle swarm optimization. Journal of Systems Engineering and Electronics, 2023, 34 (1): 197- 213.
doi: 10.23919/JSEE.2022.000132 |
| 14 |
YUAN M S, ZHOU T L, CHEN M Improved lazy theta* algorithm based on octree map for path planning of UAV. Defence Technology, 2023, 23, 8- 18.
doi: 10.1016/j.dt.2022.01.006 |
| 15 |
YAO W R, CHEN Y, FU J Y, et al Evolutionary utility prediction matrix-based mission planning for unmanned aerial vehicles in complex urban environments. IEEE Trans. on Intelligent Vehicles, 2023, 8 (2): 1068- 1080.
doi: 10.1109/TIV.2022.3192525 |
| 16 |
XIANG J, CHEN J, LIU Y C Hybrid multiscale search for dynamic planning of multi-agent drone traffic. Journal of Guidance, Control, and Dynamics, 2023, 46 (10): 1963- 1974.
doi: 10.2514/1.G007343 |
| 17 |
LIU S, SUN D, ZHU C A A dynamic priority based path planning for cooperation of multiple mobile robots in formation forming. Robotics and Computer-Integrated Manufacturing, 2014, 30 (6): 589- 596.
doi: 10.1016/j.rcim.2014.04.002 |
| 18 |
GREGOIRE J, CAP M, FRAZZOLI E Locally-optimal multi-robot navigation under delaying disturbances using homotopy constraints. Autonomous Robots, 2018, 42 (4): 895- 907.
doi: 10.1007/s10514-017-9673-6 |
| 19 | BERG J V D, SNOEYINK J, LIN M C, et al. Centralized path planning for multiple robots: optimal decoupling into sequential plans. Proc. of the Robotics: Science and Systems V, 2009. DOI:10.15607/RSS.2009.V.018. |
| 20 | XU G T, WANG Z, CAO Y, et al Dynamic priority decoupled UAV swarm trajectory planning using distributed sequential convex programming. Acta Aeronautica et Astronautica Sinica, 2022, 43 (2): 325059. |
| 21 |
BENNEWITZ M, BURGARD W, THRUN S Finding and optimizing solvable priority schemes for decoupled path planning techniques for teams of mobile robots. Robotics and Autonomous Systems, 2002, 41 (2/3): 89- 99.
doi: 10.1016/S0921-8890(02)00256-7 |
| 22 |
MA X L, MEI H Mobile robot global path planning based on improved ant colony system algorithm with potential field. Journal of Mechanical Engineering, 2021, 57 (1): 19- 27.
doi: 10.3901/JME.2021.01.019 |
| 23 | ZHOU Q P, WEI Y, HE W, et al. Research on obstacle avoidance algorithm of fixed-wing UAV swarms based on improved artificial potential field. Proc. of the International Conference on Automation, Robotics and Computer Engineering, 2022. DOI: 10.1109/ICARCE55724.2022.10046495. |
| 24 |
SCHMITT L, FICHTER W Collision-avoidance framework for small fixed-wing unmanned aerial vehicles. Journal of Guidance, Control, and Dynamics, 2014, 37 (4): 1323- 1329.
doi: 10.2514/1.G000226 |
| 25 |
FIORINI P, SHILLER Z Motion planning in dynamic environments using velocity obstacles. International Journal of Robotics Research, 1998, 17 (7): 760- 772.
doi: 10.1177/027836499801700706 |
| 26 |
HUANG J H, ZENG J, CHI X M, et al Velocity obstacle for polytopic collision avoidance for distributed multi-robot systems. IEEE Robotics and Automation Letters, 2023, 8 (6): 3502- 3509.
doi: 10.1109/LRA.2023.3269295 |
| 27 | DINKAR K R, GHOSH S. Indicator probabilistic acceleration velocity obstacles for dynamic collision avoidance in uncertain environments. Proc. of the AIAA Scitech Forum, 2021. DOI: 10.2514/6.2021-2013. |
| 28 | MUJUMDAR A, PADHI R Reactive collision avoidance of using nonlinear geometric and differential geometric guidance. Journal of Guidance, Control, and Dynamics, 2011, 34 (1): 303- 311. |
| 29 |
DU Z H, ZHAO D, SHI J P, et al Formation flight in complex environments using an artificial potential field. Journal of Aerospace Information Systems, 2021, 18 (7): 464- 475.
doi: 10.2514/1.I010870 |
| 30 |
SNAPE J, BERG J V D, GUY S J, et al The hybrid reciprocal velocity obstacle. IEEE Trans. on Robotics, 2011, 27 (4): 696- 706.
doi: 10.1109/TRO.2011.2120810 |
| 31 |
JENIE Y I, KAMPEN E J V, VISSER C C D, et al Selective velocity obstacle method for deconflicting maneuvers applied to unmanned aerial vehicles. Journal of Guidance, Control, and Dynamics, 2015, 38 (6): 1140- 1146.
doi: 10.2514/1.G000737 |
| 32 | ZHOU Z L, LONG T, CAO Y, et al. Range compensation based cooperative online path planning for multiple fixed-wing UAV system. Proc. of the International Conference on Autonomous Unmanned Systems, 2021. DOI:10.1007/978-981-16-9492-9_295. |
| [1] | Yixin HU, Yun XU, Zhaohui DANG. Time-efficient cooperative attack strategy considering collision avoidance for missile swarm [J]. Journal of Systems Engineering and Electronics, 2025, 36(5): 1306-1316. |
| [2] | Xiuxia YANG, Yi ZHANG, Weiwei ZHOU. Obstacle avoidance method of three-dimensional obstacle spherical cap [J]. Journal of Systems Engineering and Electronics, 2018, 29(5): 1058-1068. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||