
Journal of Systems Engineering and Electronics ›› 2025, Vol. 36 ›› Issue (4): 1024-1036.doi: 10.23919/JSEE.2025.000091
• SYSTEMS ENGINEERING • Previous Articles
Huawei MA1,2,*( ), Xiaoxuan HU1,2(), Waiming ZHU1,3()
), Xiaoxuan HU1,2(), Waiming ZHU1,3()
Received:2023-11-29
Online:2025-08-18
Published:2025-09-04
Contact:
Huawei MA
E-mail:Huaweima@hfut.edu.cn;xiaoxuanhu@hfut.edu.cn;zhuwaiming@hfut.edu.cn
About author:Huawei MA, Xiaoxuan HU, Waiming ZHU. Two-phase heuristic for vehicle routing problem with drones in multi-trip and multi-drop mode[J]. Journal of Systems Engineering and Electronics, 2025, 36(4): 1024-1036.

Fig 1
Routing example of VRP-mmD"
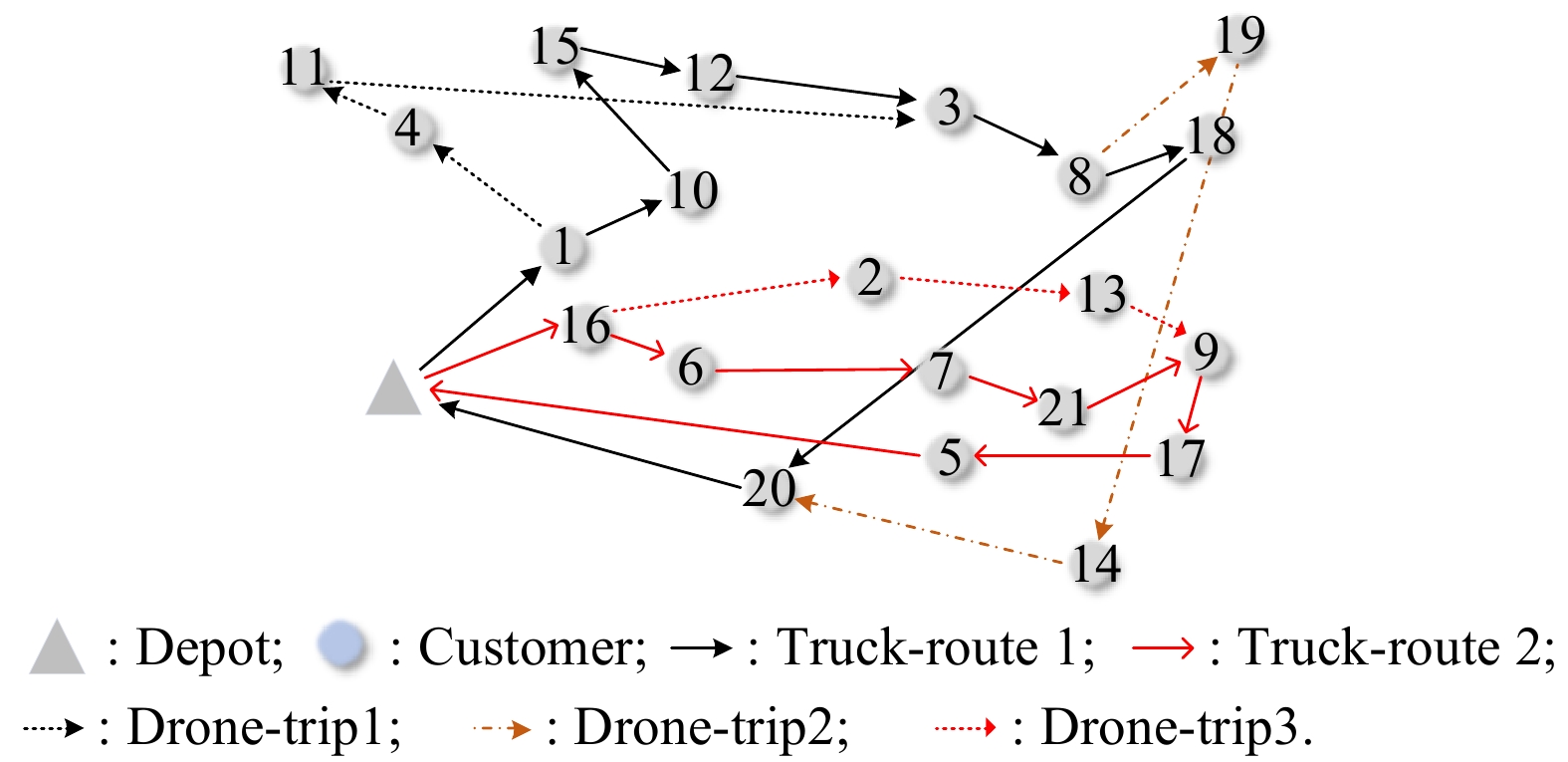
Table 1
Sets, parameters and decision variables"
| Parameter | Definition |
| Set of the nodes, | |
| Set of the nodes from which a drone may depart | |
| Set of the nodes at which a drone may be retrieved | |
| Set of the customers, | |
| Set of the customers excludes the departing and retrieving nodes of drones, | |
| Subset of | |
| Set of trucks and drones, indexed by | |
| Set of the drone’s trips on the truck | |
| Weight of the package delivered to customer | |
| Maximum load capacity of each truck | |
| Maximum load capacity of each drone | |
| Maximum flying duration of each drone in one trip | |
| Time for the drone on truck | |
| Time for truck | |
| Waiting time for truck | |
| Time for truck | |
| Time for the drone on truck | |
| A sufficiently large positive constant | |
| Binary, equals one if truck | |
| Binary, equals one if the drone on truck |
Table 2
Notations used in PRCH"
| Parameter | Definition |
| The truck route set | |
| The drone trip set | |
| The node set of truck route | |
| The node set of drone trip | |
| The set of unvisited customers | |
| The current node in | |
| The distance between node |
Table 3
Parameter definition"
| Parameter | Definition |
| The current solution | |
| The neighborhood solution | |
| The best solution | |
| The selected neighborhood structure | |
| The index of neighborhood | |
| The current temperature | |
| The initial temperature | |
| A number between 0 and 1 | |
| Increment number in | |
| The random number between 0 and 1 | |
| The solutions set | |
| The neighborhood structure set | |
| The objective function value |
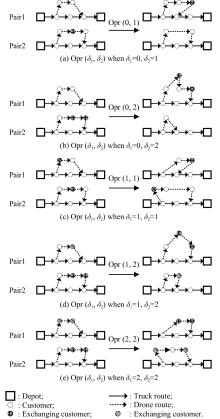
Fig 2
Neighborhood structure of inter-route operator"
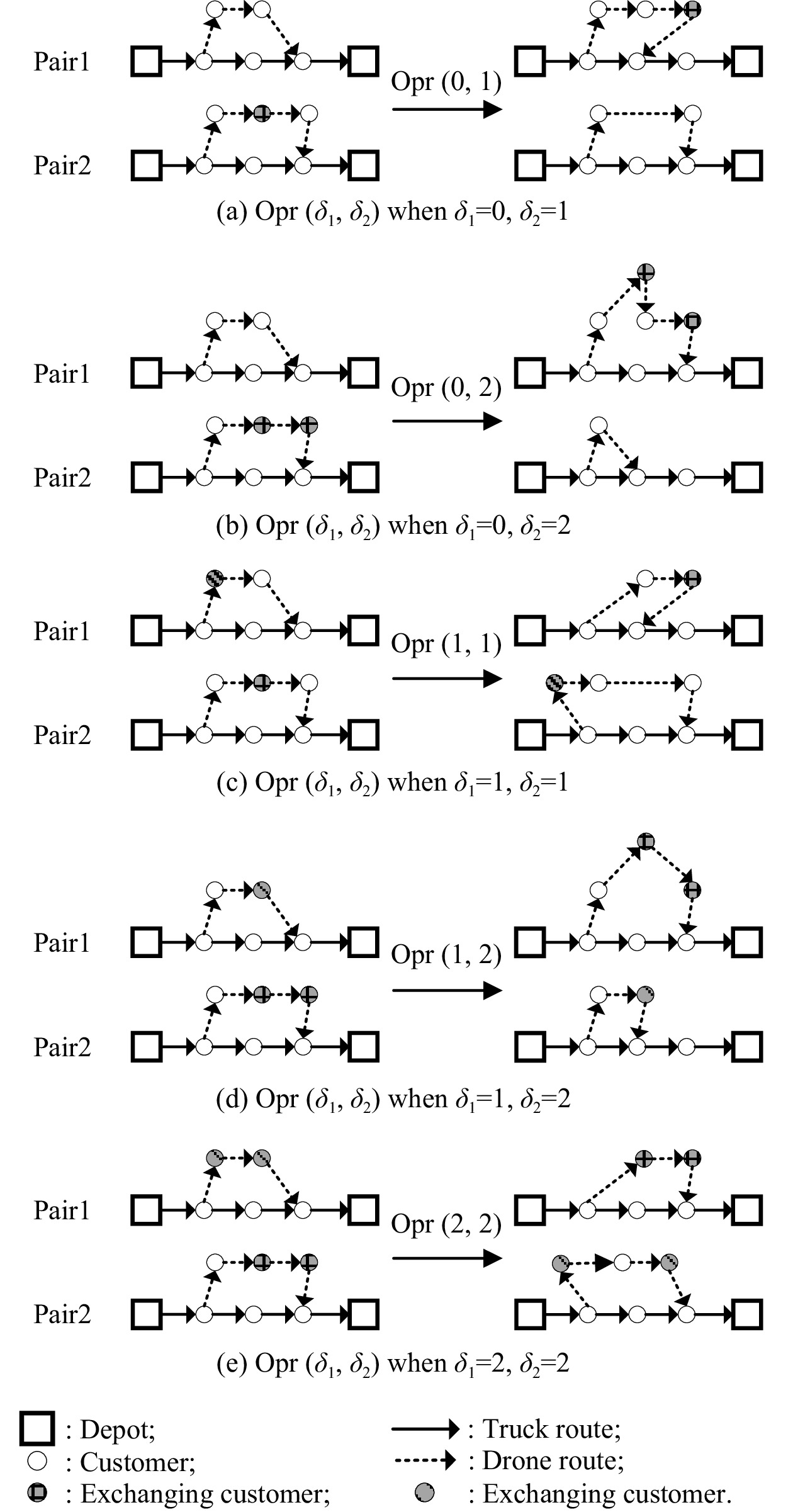
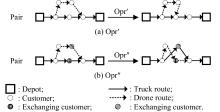
Fig 3
Neighborhood structure of intra-route operator"
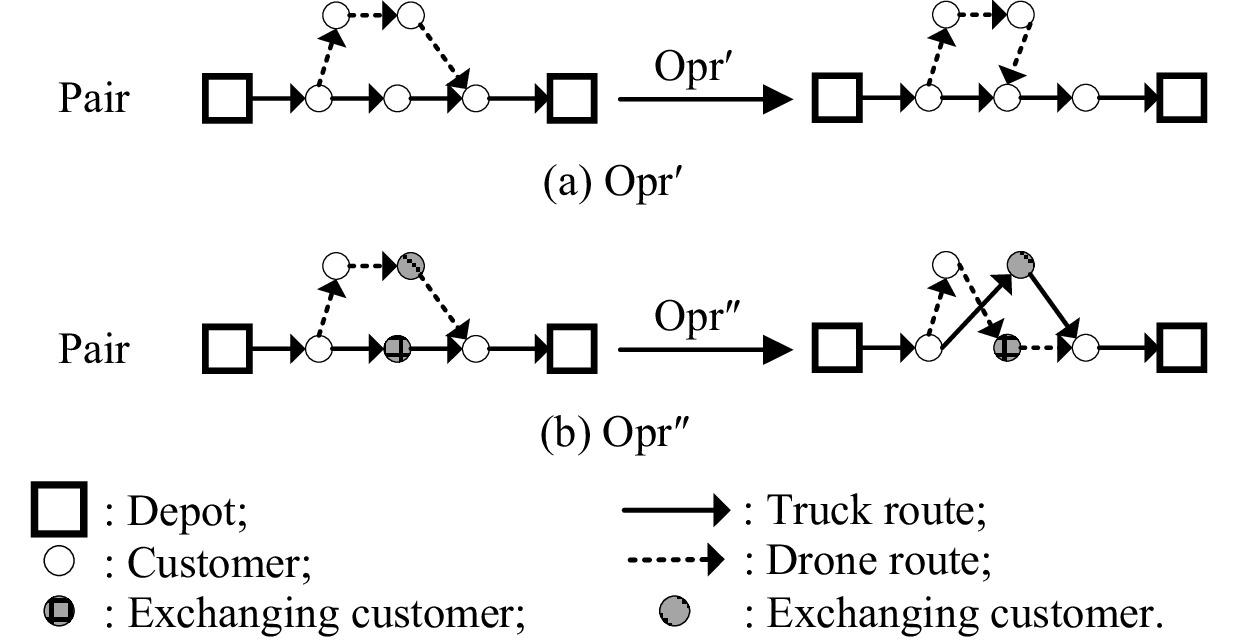
Table 4
Comparison of the results between heuristics and MIP solver on small-size instance"
| Instance | Q | q | ANSH | PRCH | MIP solver | |||||||
| Average objective | Average gap/% | Time/s | Average objective | Average gap/% | Time/s | Optimum | Time/s | |||||
| A1-n8-$\underline{\rm{k}}$2 | 100 | 40 | 233 | 1.3 | 0.51 | 281 | 22.17 | 0.22 | 230 | 371.23 | ||
| B1-n8-k2 | 100 | 40 | 285 | 0.0 | 0.50 | 296 | 3.86 | 0.31 | 285 | 173.48 | ||
| B2-n8-k2 | 100 | 40 | 270 | 1.5 | 0.49 | 276 | 3.76 | 0.22 | 266 | 299.55 | ||
| E1-n8-k2 | 100 | 40 | 193 | 0.0 | 0.47 | 198 | 2.59 | 0.19 | 193 | 533.56 | ||
| P1-n8-k2 | 100 | 40 | 96 | 1.1 | 0.48 | 119 | 25.26 | 0.32 | 95 | 617.83 | ||
| A1-n9-k2 | 100 | 40 | 271 | 1.5 | 0.55 | 279 | 4.49 | 0.43 | 267 | |||
| A2-n9-k2 | 100 | 40 | 270 | 1.9 | 0.46 | 270 | 1.89 | 0.39 | 265 | |||
| B1-n9-k2 | 100 | 40 | 332 | 0.3 | 0.57 | 336 | 1.51 | 0.36 | 331 | |||
| E1-n9-k2 | 100 | 40 | 142 | 0.0 | 0.49 | 143 | 0.70 | 0.37 | 142 | |||
| P1-n9-k2 | 100 | 40 | 140 | 0.0 | 0.51 | 148 | 5.71 | 0.36 | 140 | |||
| Average | − | 0.8 | 0.5 | − | 7.2 | 0.3 | − | − | ||||
Table 5
Comparison of the results between heuristics and MIP solver on larger size instance"
| Instance | Q | q | ANSH | PRCH | MIP solver | |||||||||
| Best | Average objective | Average gap/% | Average time/s | Best | Average objective | Average gap/% | Average time/s | Objective | Average time/s | |||||
| A-n32-k5 | 100 | 35 | 696 | 710 | −65.21 | 11.94 | 701 | 739 | −63.79 | 0.36 | 2 041 | |||
| A-n33-k5 | 100 | 35 | 576 | 586 | −66.80 | 9.6 | 589 | 657 | −62.78 | 0.33 | ||||
| A-n37-k5 | 100 | 35 | 531 | 595 | −55.83 | 12.91 | 598 | 659 | −51.08 | 0.41 | ||||
| B-n38-k6 | 100 | 35 | 635 | 665 | −58.15 | 10.67 | 641 | 700 | −55.95 | 0.45 | ||||
| B-n39-k5 | 100 | 35 | 534 | 542 | −64.03 | 10.98 | 535 | 562 | −62.71 | 0.46 | ||||
| B-n41-k6 | 100 | 35 | 747 | 775 | −57.97 | 9.96 | 772 | 812 | −55.97 | 0.54 | 1 844 | |||
| E-n51-k5 | 160 | 50 | 447 | 487 | −64.79 | 16.08 | 487 | 555 | −59.87 | 0.78 | ||||
| P-n55-k10 | 115 | 40 | 609 | 650 | −58.86 | 7.91 | 651 | 714 | −54.81 | 1.02 | ||||
| P-n60-k10 | 120 | 40 | 681 | 711 | −59.67 | 8.73 | 710 | 784 | −55.53 | 1.22 | ||||
| Average | − | − | −61.3 | 10.98 | − | − | −58.1 | 0.6 | − | − | ||||
Table 6
Comparison of the results between PRCH and DTRC in VRP-smD mode"
| Instance | Q | q | DTRC | PRCH | ||||||
| Best | Average time/s | Best | Average objective | Average time/s | Best gap/% | Average gap/% | ||||
| A-n32-k5 | 100 | 35 | 783 | 0.68 | 746 | 752 | 0.15 | −4.73 | −4.02 | |
| A-n33-k5 | 100 | 35 | 646 | 0.79 | 606 | 621 | 0.13 | −6.20 | −3.88 | |
| A-n33-k6 | 100 | 35 | 701 | 0.69 | 661 | 676 | 0.13 | −5.69 | −3.61 | |
| A-n34-k5 | 100 | 35 | 752 | 0.86 | 737 | 755 | 0.15 | −2.06 | 0.34 | |
| A-n36-k5 | 100 | 35 | 759 | 1.11 | 784 | 794 | 0.15 | 3.30 | 4.62 | |
| A-n37-k5 | 100 | 35 | 661 | 1.25 | 619 | 635 | 0.14 | −6.33 | −3.86 | |
| A-n37-k6 | 100 | 35 | 914 | 1.01 | 895 | 903 | 0.14 | −2.03 | −1.22 | |
| A-n38-k5 | 100 | 35 | 721 | 1.03 | 696 | 714 | 0.14 | −3.45 | −0.97 | |
| A-n39-k5 | 100 | 35 | 833 | 2.35 | 788 | 808 | 0.15 | −5.41 | −2.98 | |
| A-n39-k6 | 100 | 35 | 849 | 1.12 | 763 | 783 | 0.15 | −10.12 | −7.76 | |
| A-n44-k6 | 100 | 35 | 914 | 1.78 | 896 | 909 | 0.16 | −1.96 | −0.54 | |
| A-n45-k6 | 100 | 35 | 943 | 0.92 | 926 | 936 | 0.16 | −1.82 | −0.69 | |
| A-n46-k7 | 100 | 35 | 905 | 1.27 | 913 | 920 | 0.16 | 0.93 | 1.71 | |
| A-n48-k7 | 100 | 35 | 1.34 | 0.17 | −0.97 | 1.36 | ||||
| A-n53-k7 | 100 | 35 | 1.02 | 994 | 0.18 | −0.56 | 3.01 | |||
| A-n54-k7 | 100 | 35 | 1.58 | 0.19 | 1.50 | 3.96 | ||||
| A-n55-k9 | 100 | 35 | 1.53 | 0.19 | −3.39 | −0.15 | ||||
| A-n62-k8 | 100 | 35 | 3.32 | 0.21 | 3.26 | 4.89 | ||||
| A-n63-k10 | 100 | 35 | 2.26 | 0.22 | −4.82 | 0.70 | ||||
| A-n65-k9 | 100 | 35 | 2.96 | 0.22 | −1.25 | 1.61 | ||||
| A-n69-k9 | 100 | 35 | 2.40 | 0.24 | 11.01 | 13.04 | ||||
| B-n31-k5 | 100 | 35 | 672 | 0.72 | 582 | 585 | 0.13 | −13.32 | −13.00 | |
| B-n34-k5 | 100 | 35 | 769 | 0.87 | 664 | 694 | 0.13 | −13.65 | −9.77 | |
| B-n35-k5 | 100 | 35 | 954 | 0.71 | 767 | 774 | 0.13 | −19.60 | −18.88 | |
| B-n38-k6 | 100 | 35 | 803 | 1.11 | 644 | 655 | 0.14 | −19.75 | −18.46 | |
| B-n39-k5 | 100 | 35 | 548 | 0.97 | 534 | 538 | 0.14 | −2.54 | −1.76 | |
| B-n41-k6 | 100 | 35 | 875 | 0.82 | 778 | 785 | 0.15 | −11.07 | −10.33 | |
| E-n51-k5 | 160 | 50 | 502 | 2.86 | 522 | 538 | 0.17 | 3.95 | 7.21 | |
| E-n76-k7 | 220 | 55 | 650 | 3.87 | 727 | 745 | 0.27 | 11.86 | 14.63 | |
| E-n76-k8 | 180 | 45 | 684 | 3.65 | 796 | 812 | 0.27 | 16.41 | 18.71 | |
| E-n76-k10 | 140 | 40 | 827 | 3.06 | 886 | 897 | 0.27 | 7.18 | 8.42 | |
| E-n76-k14 | 100 | 35 | 1.94 | 0.28 | −0.90 | 0.83 | ||||
| P-n16-k8 | 35 | 20 | 469 | 0.37 | 430 | 447 | 0.11 | −8.32 | −4.69 | |
| P-n19-k2 | 160 | 40 | 221 | 0.65 | 205 | 205 | 0.11 | −7.16 | −7.16 | |
| P-n20-k2 | 160 | 40 | 216 | 0.54 | 216 | 216 | 0.11 | −0.21 | −0.21 | |
| P-n21-k2 | 160 | 40 | 203 | 0.77 | 223 | 223 | 0.11 | 9.68 | 9.68 | |
| P-n22-k2 | 160 | 40 | 208 | 0.76 | 218 | 218 | 0.11 | 4.97 | 4.97 | |
| P-n23-k8 | 40 | 20 | 527 | 0.48 | 496 | 503 | 0.12 | −5.88 | −4.55 | |
| P-n40-k5 | 140 | 40 | 456 | 1.56 | 446 | 458 | 0.15 | −2.13 | 0.48 | |
| P-n45-k5 | 150 | 40 | 495 | 1.06 | 525 | 531 | 0.16 | 6.15 | 7.18 | |
| P-n50-k7 | 150 | 40 | 555 | 0.98 | 588 | 597 | 0.17 | 5.97 | 7.48 | |
| P-n50-k8 | 120 | 40 | 604 | 1.08 | 593 | 621 | 0.17 | −1.77 | 2.80 | |
| P-n50-k10 | 100 | 35 | 705 | 1.45 | 671 | 685 | 0.18 | −4.79 | −2.79 | |
| P-n55-k7 | 170 | 45 | 579 | 1.68 | 576 | 601 | 0.19 | −0.43 | 3.72 | |
| P-n55-k10 | 115 | 40 | 695 | 1.71 | 661 | 682 | 0.19 | −4.83 | −1.88 | |
| P-n55-k15 | 70 | 38 | 937 | 1.33 | 847 | 869 | 0.19 | −9.65 | −7.24 | |
| P-n60-k10 | 120 | 40 | 735 | 1.89 | 745 | 762 | 0.21 | 1.30 | 3.71 | |
| P-n60-k15 | 80 | 30 | 968 | 1.62 | 886 | 908 | 0.22 | −8.45 | −6.22 | |
| P-n65-k10 | 130 | 40 | 803 | 2.07 | 812 | 837 | 0.23 | 1.07 | 4.19 | |
| P-n70-k10 | 135 | 40 | 832 | 2.36 | 877 | 893 | 0.25 | 5.41 | 7.30 | |
| Average | − | 1.48 | − | − | 0.17 | −2.03 | 0.00 | |||
Table 7
Comparison of the results between ANSH and LNS in VRP-smD mode"
| Instance | Q | q | LNS | ANSH | ||||||
| Best | Average time/s | Best | Average objective | Average time/s | Best gap/% | Average gap/% | ||||
| A-n32-k5 | 100 | 35 | 699 | 68.36 | 689 | 706 | 6.12 | −1.49 | 1.00 | |
| A-n33-k5 | 100 | 35 | 561 | 68.36 | 546 | 595 | 6.39 | −2.65 | 6.10 | |
| A-n33-k6 | 100 | 35 | 634 | 63.53 | 632 | 662 | 4.97 | −0.34 | 4.35 | |
| A-n34-k5 | 100 | 35 | 648 | 66.14 | 653 | 681 | 7.48 | 0.75 | 5.04 | |
| A-n36-k5 | 100 | 35 | 669 | 68.63 | 758 | 763 | 8.36 | 13.28 | 14.06 | |
| A-n37-k5 | 100 | 35 | 516 | 68.40 | 552 | 584 | 9.29 | 6.88 | 13.23 | |
| A-n37-k6 | 100 | 35 | 837 | 66.45 | 792 | 820 | 6.25 | −5.39 | −2.07 | |
| A-n38-k5 | 100 | 35 | 636 | 70.57 | 632 | 657 | 7.61 | −0.56 | 3.31 | |
| A-n39-k5 | 100 | 35 | 698 | 66.38 | 681 | 693 | 7.29 | −2.50 | −0.65 | |
| A-n39-k6 | 100 | 35 | 692 | 76.10 | 686 | 733 | 6.92 | −0.88 | 5.92 | |
| A-n44-k6 | 100 | 35 | 825 | 72.64 | 804 | 826 | 7.26 | −2.58 | 0.11 | |
| A-n45-k6 | 100 | 35 | 846 | 85.52 | 855 | 892 | 7.14 | 1.04 | 5.46 | |
| A-n46-k7 | 100 | 35 | 810 | 90.40 | 780 | 832 | 6.17 | −3.71 | 2.71 | |
| A-n48-k7 | 100 | 35 | 973 | 73.54 | 909 | 969 | 7.48 | −6.61 | −0.41 | |
| A-n53-k7 | 100 | 35 | 952 | 95.63 | 915 | 942 | 9.33 | −3.89 | −1.00 | |
| A-n54-k7 | 100 | 35 | 93.10 | 8.12 | −3.37 | 0.05 | ||||
| A-n55-k9 | 100 | 35 | 981 | 94.46 | 895 | 949 | 6.48 | −8.81 | −3.22 | |
| A-n62-k8 | 100 | 35 | 118.51 | 7.55 | −11.36 | −6.91 | ||||
| A-n63-k10 | 100 | 35 | 93.83 | 6.74 | −9.77 | −7.60 | ||||
| A-n65-k9 | 100 | 35 | 145.90 | 6.71 | 1.63 | 4.83 | ||||
| A-n69-k9 | 100 | 35 | 152.80 | 8.92 | −3.70 | 0.13 | ||||
| B-n31-k5 | 100 | 35 | 653 | 66.35 | 556 | 572 | 7.84 | −14.85 | −12.38 | |
| B-n34-k5 | 100 | 35 | 748 | 69.87 | 678 | 698 | 7.13 | −9.32 | −6.74 | |
| B-n35-k5 | 100 | 35 | 896 | 67.05 | 747 | 750 | 8.84 | −16.60 | −16.24 | |
| B-n38-k6 | 100 | 35 | 723 | 69.44 | 634 | 665 | 6.72 | −12.32 | −8.08 | |
| B-n39-k5 | 100 | 35 | 497 | 75.09 | 530 | 534 | 6.70 | 6.55 | 7.42 | |
| B-n41-k6 | 100 | 35 | 813 | 82.07 | 762 | 770 | 6.89 | −6.21 | −5.30 | |
| E-n51-k5 | 160 | 50 | 452 | 94.20 | 451 | 467 | 9.00 | −0.29 | 3.28 | |
| E-n76-k7 | 220 | 55 | 622 | 150.79 | 525 | 573 | 1.06 | −15.53 | −7.90 | |
| E-n76-k8 | 180 | 45 | 664 | 233.76 | 532 | 583 | 8.80 | −19.91 | −12.23 | |
| E-n76-k10 | 140 | 40 | 795 | 289.56 | 756 | 808 | 7.04 | −4.94 | 1.62 | |
| E-n76-k14 | 100 | 35 | 160.27 | 890 | 922 | 5.26 | −11.73 | −8.48 | ||
| P-n16-k8 | 35 | 20 | 444 | 60.24 | 403 | 410 | 2.55 | −9.23 | −7.66 | |
| P-n19-k2 | 160 | 40 | 165 | 60.67 | 146 | 180 | 4.78 | −11.33 | 8.93 | |
| P-n20-k2 | 160 | 40 | 166 | 60.88 | 139 | 158 | 3.48 | −16.03 | −5.05 | |
| P-n21-k2 | 160 | 40 | 161 | 61.77 | 150 | 165 | 2.22 | −6.83 | 2.48 | |
| P-n22-k2 | 160 | 40 | 163 | 61.84 | 186 | 195 | 1.67 | 14.11 | 19.63 | |
| P-n23-k8 | 40 | 20 | 512 | 61.24 | 488 | 497 | 2.72 | −4.69 | −2.93 | |
| P-n40-k5 | 140 | 40 | 379 | 81.46 | 397 | 413 | 7.16 | 4.65 | 8.92 | |
| P-n45-k5 | 150 | 40 | 426 | 80.29 | 400 | 418 | 7.44 | −6.02 | −1.86 | |
| P-n50-k7 | 150 | 40 | 502 | 91.90 | 477 | 495 | 5.66 | −4.94 | −1.38 | |
| P-n50-k8 | 120 | 40 | 578 | 73.33 | 520 | 566 | 5.37 | −9.99 | −2.00 | |
| P-n50-k10 | 100 | 35 | 665 | 81.98 | 606 | 618 | 4.83 | −8.90 | −7.04 | |
| P-n55-k7 | 170 | 45 | 512 | 96.21 | 445 | 479 | 7.41 | −13.00 | −6.54 | |
| P-n55-k10 | 115 | 40 | 654 | 92.65 | 579 | 611 | 5.65 | −11.41 | −6.54 | |
| P-n55-k15 | 70 | 38 | 919 | 77.16 | 786 | 798 | 4.25 | −14.52 | −13.19 | |
| P-n60-k10 | 120 | 40 | 714 | 99.47 | 669 | 692 | 5.45 | −6.37 | −3.15 | |
| P-n60-k15 | 80 | 30 | 946 | 83.28 | 831 | 850 | 4.70 | −12.20 | −10.10 | |
| P-n65-k10 | 130 | 40 | 730 | 128.82 | 729 | 749 | 5.76 | −0.18 | 2.58 | |
| P-n70-k10 | 135 | 40 | 783 | 138.90 | 765 | 783 | 6.48 | −2.24 | −0.05 | |
| Average | − | 93.00 | − | − | 6.31 | −5.37 | −0.91 | |||
Table 8
Stability results on large size instance"
| Instance | n | ANSH | PRCH | |||
| Average time/s | Average RV | Average time/s | Average RV | |||
| M-n101-K10 | 100 | 13.28 | 2.43 | |||
| M-n151-k12 | 150 | 19.27 | 2.88 | |||
| M-n200-k16 | 240 | 16.37 | 3.13 | |||
| Golden_17 | 300 | 18.36 | 3.39 | |||
| Golden_18 | 360 | 17.21 | 4.94 | |||
| Golden_19 | 385 | 20.59 | 5.47 | |||
| Tai385 | 420 | 19.37 | 6.92 | |||
| Golden_20 | 468 | 24.63 | 10.06 | |||
| Li_21 | 560 | 32.14 | 15.18 | |||
| Li_25 | 626 | 35.92 | 17.64 | |||
| Li_28 | 700 | 40.74 | 23.16 | |||
| Li_29 | 836 | 40.24 | 37.68 | |||
| Li_30 | 935 | 45.38 | 44.95 | |||
| Li_31 | 978 | 60.51 | 46.44 | |||
| Li_32 | 65.71 | 47.95 | ||||
| Average | 18.15 | 31.31 | ||||
| 1 |
YAMAN H, KARASAN O E, KARA B Y Release time scheduling and hub location for next-day delivery. Operations Research, 2012, 60 (4): 906- 917.
doi: 10.1287/opre.1120.1065 |
| 2 |
RAMOS T R P, VIGO D A new hybrid distribution paradigm: integrating drones in medicines delivery. Expert Systems with Applications, 2023, 234, 120992.
doi: 10.1016/j.eswa.2023.120992 |
| 3 |
CHEN X, ULMER M W, THOMAS B W Deep Q-learning for same-day delivery with vehicles and drones. European Journal of Operational Research, 2022, 298 (3): 939- 952.
doi: 10.1016/j.ejor.2021.06.021 |
| 4 |
MBIADOU SALEU R G, DEROUSSI L, FEILLET D, et al An iterative two-step heuristic for the parallel drone scheduling traveling salesman problem. Networks, 2018, 72 (4): 459- 474.
doi: 10.1002/net.21846 |
| 5 |
NGUYEN M A, DANG G T H, HA M H, et al The min-cost parallel drone scheduling vehicle routing problem. European Journal of Operational Research, 2022, 299 (3): 910- 930.
doi: 10.1016/j.ejor.2021.07.008 |
| 6 |
MBIADOU SALEU R G, DEROUSSI L, FEILLET D, et al The parallel drone scheduling problem with multiple drones and vehicles. European Journal of Operational Research, 2022, 300 (2): 571- 589.
doi: 10.1016/j.ejor.2021.08.014 |
| 7 |
BOGYRBAYEVA A, YOON T, KO H, et al A deep reinforcement learning approach for solving the traveling salesman problem with drone. Transportation Research Part C: Emerging Technologies, 2023, 148, 103981.
doi: 10.1016/j.trc.2022.103981 |
| 8 |
TINIC G O, KARASAN O E, KARA B Y, et al Exact solution approaches for the minimum total cost traveling salesman problem with multiple drones. Transportation Research Part B: Methodological, 2023, 168, 81- 123.
doi: 10.1016/j.trb.2022.12.007 |
| 9 |
YIN Y Q, LI D W, WANG D J, et al A branch-and-price-and-cut algorithm for the truck-based drone delivery routing problem with time windows. European Journal of Operational Research, 2023, 309 (3): 1125- 1144.
doi: 10.1016/j.ejor.2023.02.030 |
| 10 |
XIA Y, ZENG W J, ZHANG C R, et al A branch-and-price-and-cut algorithm for the vehicle routing problem with load-dependent drones. Transportation Research Part B: Methodological, 2023, 171, 80- 110.
doi: 10.1016/j.trb.2023.03.003 |
| 11 |
MURRAY C C, CHU A G The flying sidekick traveling salesman problem: optimization of drone-assisted parcel delivery. Transportation Research Part C: Emerging Technologies, 2015, 54, 86- 109.
doi: 10.1016/j.trc.2015.03.005 |
| 12 |
MARINELLI M, CAGGIANI L, OTTOMANELLI M, et al En route truck–drone parcel delivery for optimal vehicle routing strategies. IET Intelligent Transport Systems, 2018, 12 (4): 253- 261.
doi: 10.1049/iet-its.2017.0227 |
| 13 | KITJACHAROENCHAI P, VENTRESCA M, MOSHREF-JAVADI M, et al Multiple traveling salesman problem with drones: mathematical model and heuristic approach. Computers & Industrial Engineering, 2019, 129, 14- 30. |
| 14 | VÁSQUEZ S A, ANGULO G, KLAPP M A An exact solution method for the TSP with drone based on decomposition. Computers & Operations Research, 2021, 127, 105127. |
| 15 | IBROŞKA B, OZPEYNIRCI S, OZPEYNIRCI O Multiple traveling salesperson problem with drones: general variable neighborhood search approach. Computers & Operations Research, 2023, 160, 106390. |
| 16 |
HA Q M, DEVILLE Y, PHAM Q D, et al On the min-cost traveling salesman problem with drone. Transportation Research Part C: Emerging Technologies, 2018, 86, 597- 621.
doi: 10.1016/j.trc.2017.11.015 |
| 17 |
DE FREITAS J C, PENNA P H V A variable neighborhood search for flying sidekick traveling salesman problem. International Transactions in Operational Research, 2020, 27 (1): 267- 290.
doi: 10.1111/itor.12671 |
| 18 |
HA Q M, DEVILLE Y, PHAM Q D, et al A hybrid genetic algorithm for the traveling salesman problem with drone. Journal of Heuristics, 2020, 26 (2): 219- 247.
doi: 10.1007/s10732-019-09431-y |
| 19 |
GUNAY-SEZER N S, CAKMAK E, BULKAN S A hybrid metaheuristic solution method to traveling salesman problem with drone. Systems, 2023, 11 (5): 259.
doi: 10.3390/systems11050259 |
| 20 | EL-ADLE A M, GHONIEM A, HAOUARI M A variable neighborhood search for parcel delivery by vehicle with drone cycles. Computers & Operations Research, 2023, 159, 106319. |
| 21 |
ZHOU H, QIN H, CHENG C, et al An exact algorithm for the two-echelon vehicle routing problem with drones. Transportation Research Part B: Methodological, 2023, 168, 124- 150.
doi: 10.1016/j.trb.2023.01.002 |
| 22 |
KUO R J, EDBERT E, ZULVIA F E, et al Applying NSGA-II to vehicle routing problem with drones considering makespan and carbon emission. Expert Systems with Applications, 2023, 221, 119777.
doi: 10.1016/j.eswa.2023.119777 |
| 23 |
KITJACHAROENCHAI P, MIN B C, LEE S Two echelon vehicle routing problem with drones in last mile delivery. International Journal of Production Economics, 2020, 225, 107598.
doi: 10.1016/j.ijpe.2019.107598 |
| 24 |
GU R X, POON M, LUO Z H, et al A hierarchical solution evaluation method and a hybrid algorithm for the vehicle routing problem with drones and multiple visits. Transportation Research Part C: Emerging Technologies, 2022, 141, 103733.
doi: 10.1016/j.trc.2022.103733 |
| 25 | LU Y C, YANG J, YANG C A humanitarian vehicle routing problem synchronized with drones in time-varying weather conditions. Computers & Industrial Engineering, 2023, 184, 109563. |
| 26 |
YIN Y Q, YANG Y J, YU Y, et al Robust vehicle routing with drones under uncertain demands and truck travel times in humanitarian logistics. Transportation Research Part B: Methodological, 2023, 174, 102781.
doi: 10.1016/j.trb.2023.102781 |
| 27 |
ZENG F, CHEN Z, CLARKE J P, et al Nested vehicle routing problem: optimizing drone-truck surveillance operations. Transportation Research Part C: Emerging Technologies, 2022, 139, 103645.
doi: 10.1016/j.trc.2022.103645 |
| 28 |
JIANG J, DAI Y, YANG F, et al A multi-visit flexible-docking vehicle routing problem with drones for simultaneous pickup and delivery services. European Journal of Operational Research, 2024, 312 (1): 125- 137.
doi: 10.1016/j.ejor.2023.06.021 |
| 29 |
REN X, FROGER A, JABALI O, et al A competitive heuristic algorithm for vehicle routing problems with drones. European Journal of Operational Research, 2024, 318 (2): 469- 485.
doi: 10.1016/j.ejor.2024.05.031 |
| 30 |
AMINE MASMOUDI M, MANCINI S, BALDACCI R, et al Vehicle routing problems with drones equipped with multi-package payload compartments. Transportation Research Part E: Logistics and Transportation Review, 2022, 164, 102757.
doi: 10.1016/j.tre.2022.102757 |
| 31 |
EUCHI J, SADOK A Hybrid genetic-sweep algorithm to solve the vehicle routing problem with drones. Physical Communication, 2021, 44, 101236.
doi: 10.1016/j.phycom.2020.101236 |
| [1] | Zhishuo LIU, Yi’nan CHENG, Yanhua LI, Danyang SHEN. Modeling optimal air traffic rights resource allocation [J]. Journal of Systems Engineering and Electronics, 2025, 36(3): 778-790. |
| [2] | Naikang YU, Bin QIAN, Rong HU, Yuwang CHEN, Ling WANG. Solving open vehicle problem with time window by hybrid column generation algorithm [J]. Journal of Systems Engineering and Electronics, 2022, 33(4): 997-1009. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||