
Journal of Systems Engineering and Electronics ›› 2025, Vol. 36 ›› Issue (2): 446-461.doi: 10.23919/JSEE.2025.000048
• SYSTEMS ENGINEERING • Previous Articles
Jingfeng GUO( ), Rui SONG(), Shiwei HE()
), Rui SONG(), Shiwei HE()
Received:2024-06-03
Online:2025-04-18
Published:2025-05-20
Contact:
Rui SONG
E-mail:616988704@qq.com;rsong@bjtu.edu.cn;shwhe@bjtu.edu.cn
About author:Supported by:Jingfeng GUO, Rui SONG, Shiwei HE. Aerial-ground collaborative delivery route planning with UAV energy function and multi-delivery[J]. Journal of Systems Engineering and Electronics, 2025, 36(2): 446-461.
Add to citation manager EndNote|Reference Manager|ProCite|BibTeX|RefWorks
Table 1
Overview of main researches on UAV-based delivery & AGCD"
| Reference | Problem modelling | Algorithm | ||||||
| V | U | Obj | TW | CVU | UEC | UDM | ||
| Murray et al. [ | 1 | 1 | CT | × | SC | ET | SD | Heuristic |
| Ha et al. [ | 1 | 1 | CDW | × | SC | ET | SD | GRASP |
| Tu et al. [ | 1 | N | CD | × | SC | ED | SD | GRASP-ALNS |
| Murray et al. [ | 1 | N | CT | × | SC | ET | SD | Heuristic |
| Lan et al. [ | 1 | 1 | CT | √ | SC | ET | SD | Heuristic |
| Schermer et al. [ | M | N | MS | × | SC | ED | SD | Matheuristic |
| Kuo et al. [ | M | 1 | CD | √ | SC | ET | SD | VNS |
| Sacramento et al. [ | M | 1 | CD | × | SC | ET | SD | ALNS |
| Cheng et al. [ | 0 | N | CE | √ | − | EP | MD | Branch-and-cut |
| Jeong et al. [ | 1 | 1 | CT | × | SC | EP | SD | Heuristic |
| Meng et al. [ | M | 1 | CD | × | HC | EP | MD | ISA |
| Wu et al. [ | M | N | MS | × | SC | EP | MD | ALNS |
| Ma et al. [ | M | 1 | MS | × | SC | ET | MD | AAGM |
| This paper | M | 1 | CE | √ | HC | EPW | MD | MEALNS |

Fig 1
Example of VRPU-TW&MD solution"
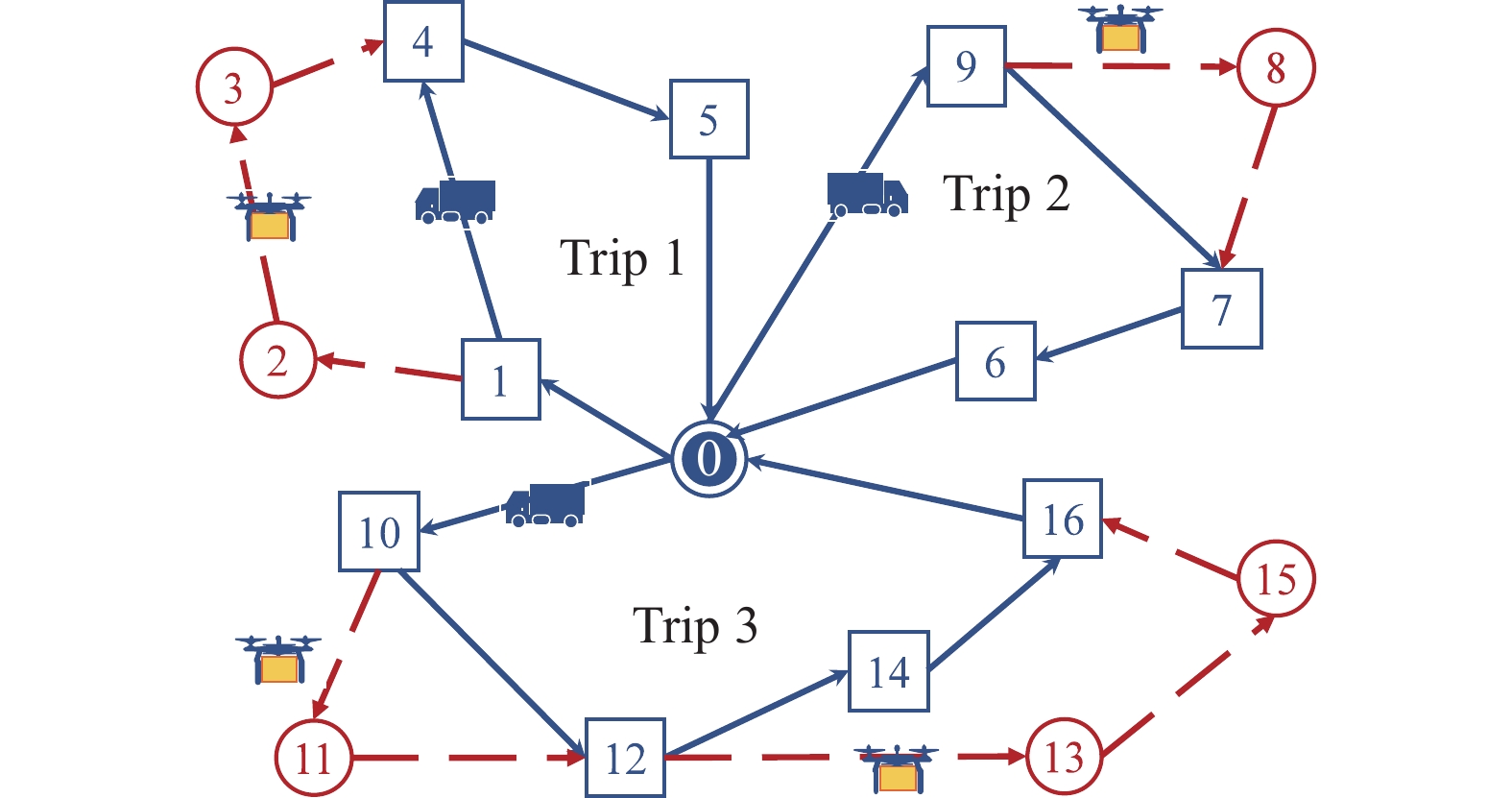

Fig 2
Variations in payload and wind condition during UAV multi-delivery operations"
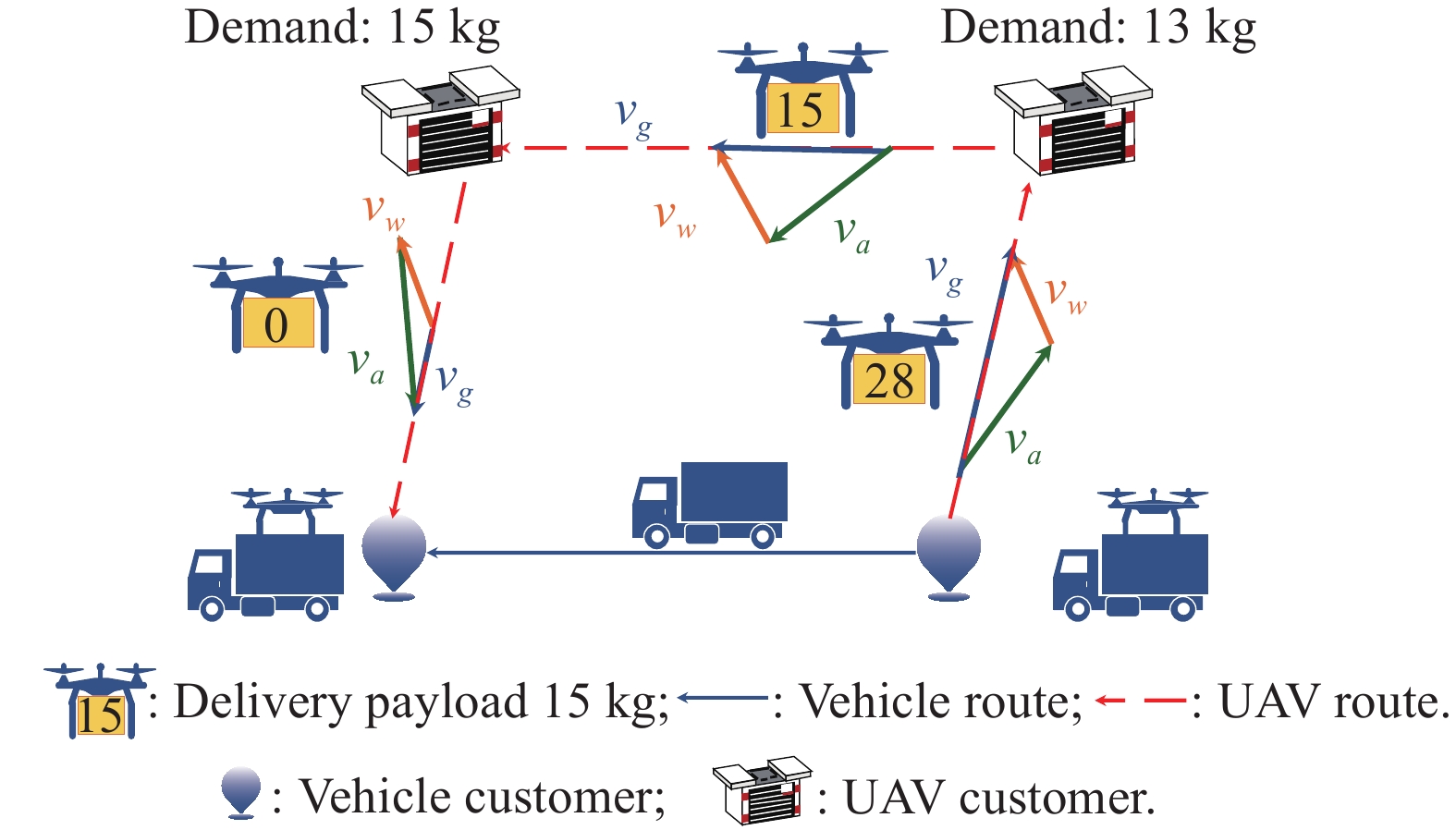
Table 2
Parameters of UAV energy consumption"
| Parameter | Description |
| Consumed energy | |
| UAV’s flight power | |
| Flight duration | |
| Drag coefficient | |
| Front surface of UAV | |
| Air density | |
| UAV’s airspeed | |
| UAV’s body weight | |
| UAV’s payload | |
| Gravitational acceleration | |
| UAV width | |
| Flight distance | |
| UAV’s ground speed | |
| Wind speed | |
| Angle of airspeed | |
| Angle of wind speed | |
| Angle of ground speed |

Fig 3
Solution encoding and decoding"
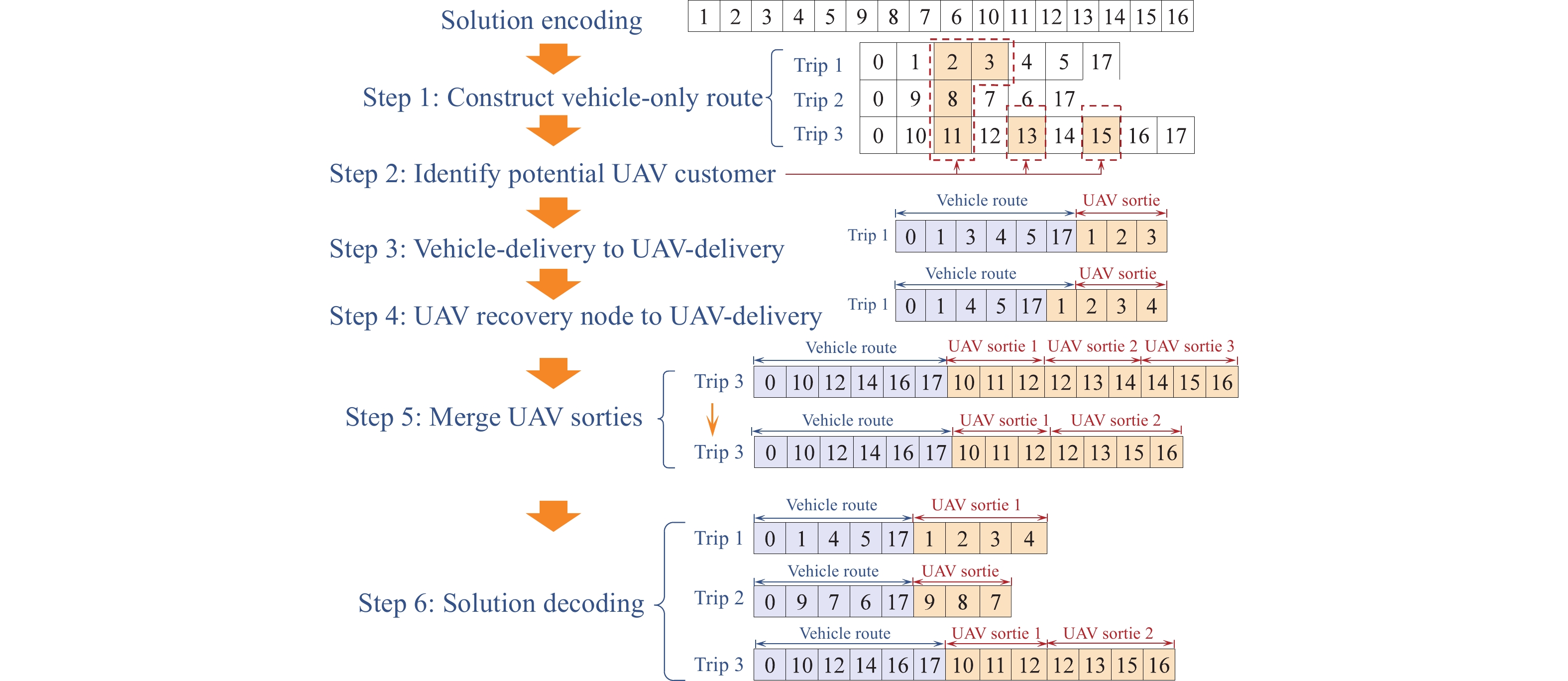

Fig 4
Dominant gene structure and exchange gene"
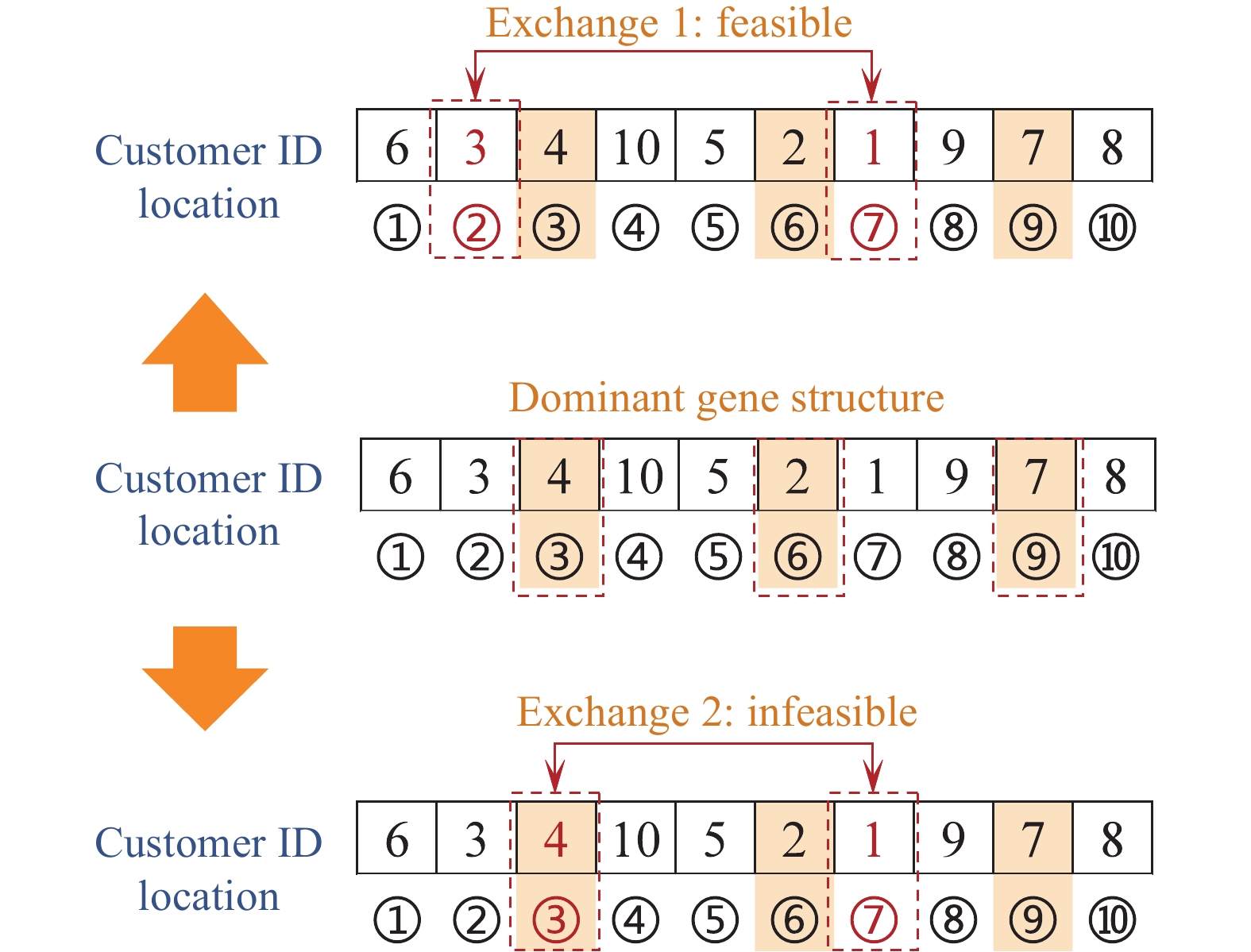
Table 3
Score of the corresponding operator"
| Score | Description |
| New solution sn is better than global best solution s* | |
| New solution sn is better than the current solution sc but worse than global best solution s* | |
| New solution is worse than the cost of the current solution but f(sn)−f(sc) < T |
Table 4
Technical specifications for vehicle and UAV"
| Parameter | Value |
| Cost coefficient of UAV | 1.68×10−7 |
| Cost coefficient of vehicle | |
| Maximum payload of vehicle/kg | |
| Maximum payload of UAV/kg | 30 |
| Battery volume/J | |
| Airspeed/(m/s) | 20 |
| UAV empty weight/kg | 25 |
| Drag coefficient | 0.54 |
| The front surface of UAV/m2 | 1.8 |
| UAV width/m | 1.88 |
| Air density | 1.225 |
Table 5
Parameters of the MEALNS algorithm"
| Parameter | Value |
| Population size | 100 |
| Iterations of micro-evolution | 100 |
| Percentage of removed customers β/% | 20 |
| 30 | |
| 18 | |
| 12 | |
| tol | 0.01 |
| phi | |
| ρ | 0.6 |
Table 6
Statistical data on solutions with Gurobi and MEALNS algorithm in Scenario 1"
| Case | Size | Dimension/km2 | Gurobi | MEALNS | GAP/% | ||||
| 1 | 8 | 10×10 | 42.594 | 191.830 | 61.753 | 62.867 | 10.315 | 32.247 | |
| 2 | 8 | 8×8 | 36.620 | 44.040 | 35.920 | 39.808 | 10.743 | 8.009 | |
| 3 | 10 | 10×10 | 57.304 | 438.730 | 64.072 | 67.654 | 11.746 | 15.298 | |
| 4 | 10 | 8×8 | 41.106 | 701.250 | 39.514 | 41.962 | 11.583 | 2.038 | |
Table 7
Statistical data on solutions with Gurobi and MEALNS algorithm in Scenario 2"
| Case | Size | Dimension/km2 | Gurobi | MEALNS | GAP/% | ||||
| 1 | 8 | 10×10 | 58.149 | 137.460 | 59.799 | 60.421 | 11.238 | 3.760 | |
| 2 | 8 | 8×8 | 34.590 | 9.930 | 36.293 | 40.034 | 10.694 | 13.600 | |
| 3 | 10 | 10×10 | 73.872 | 211.790 | 71.856 | 74.181 | 11.628 | 0.416 | |
| 4 | 10 | 8×8 | 38.311 | 316.170 | 38.590 | 40.258 | 11.621 | 4.836 | |

Fig 5
AGCD routes for Case 1 under two wind scenarios"
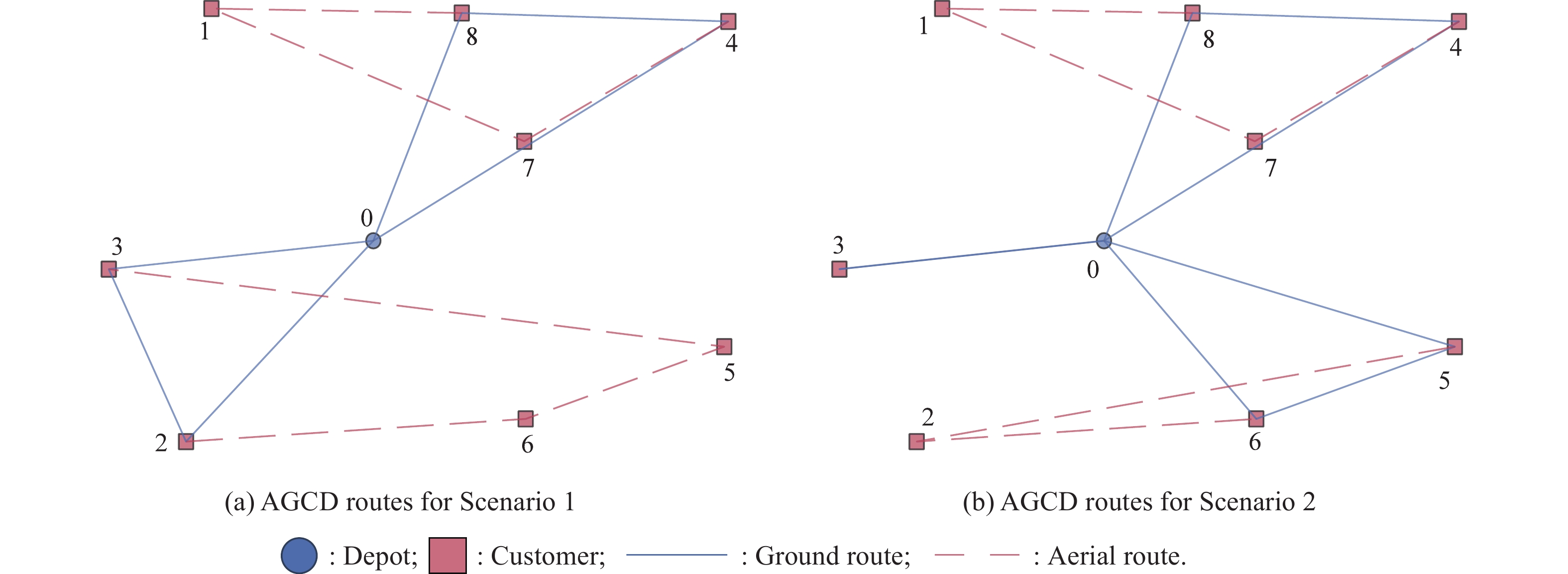
Table 8
Statistical data on solutions with different algorithms on larger-size experiment"
| Case | Size | Dimension/km2 | MEALNS | ALNS | GA | |||||||
| GAP1 /% | GAP2 /% | |||||||||||
| 1 | 20 | 10×10 | 80.181 | 52.370 | 36.216 | 14.146 | 84.529 | 5.423 | 98.429 | 22.758 | ||
| 2 | 20 | 8×8 | 48.231 | 58.900 | 37.837 | 15.483 | 51.292 | 6.347 | 61.434 | 27.375 | ||
| 3 | 30 | 10×10 | 111.065 | 50.045 | 41.433 | 29.849 | 114.041 | 2.679 | 139.820 | 25.890 | ||
| 4 | 30 | 8×8 | 70.372 | 59.982 | 41.088 | 39.137 | 74.597 | 6.004 | 90.251 | 28.248 | ||
| 5 | 50 | 10×10 | 166.789 | 55.395 | 45.967 | 180.322 | 167.378 | 0.353 | 237.216 | 42.226 | ||
| 6 | 50 | 8×8 | 108.916 | 59.263 | 46.579 | 202.741 | 109.290 | 0.344 | 151.953 | 39.514 | ||
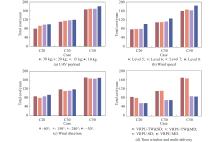
Fig 6
Impact of different parameters on average total cost"
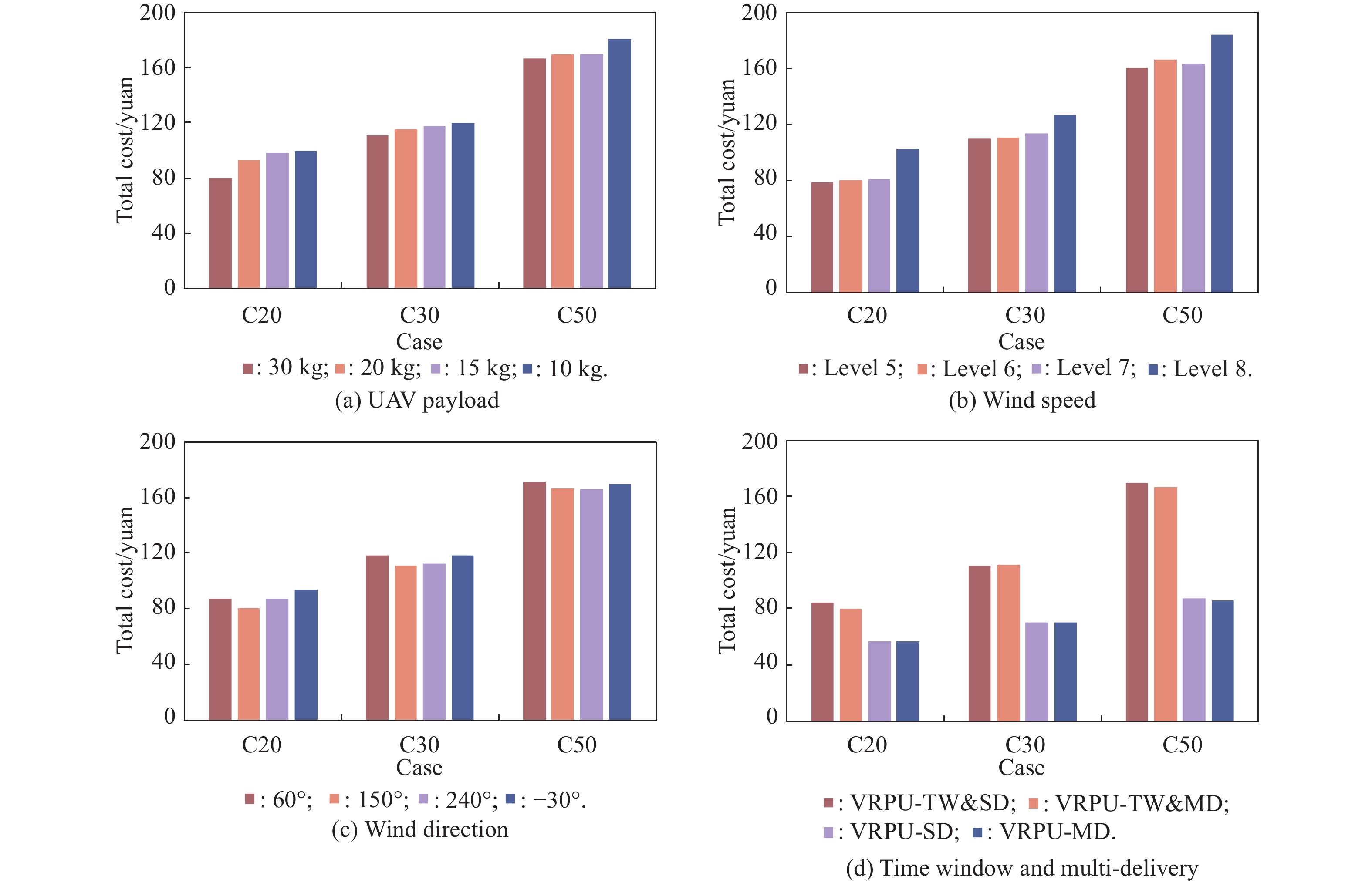

Fig 7
Cost and route under different levels of key parameters for case C20"
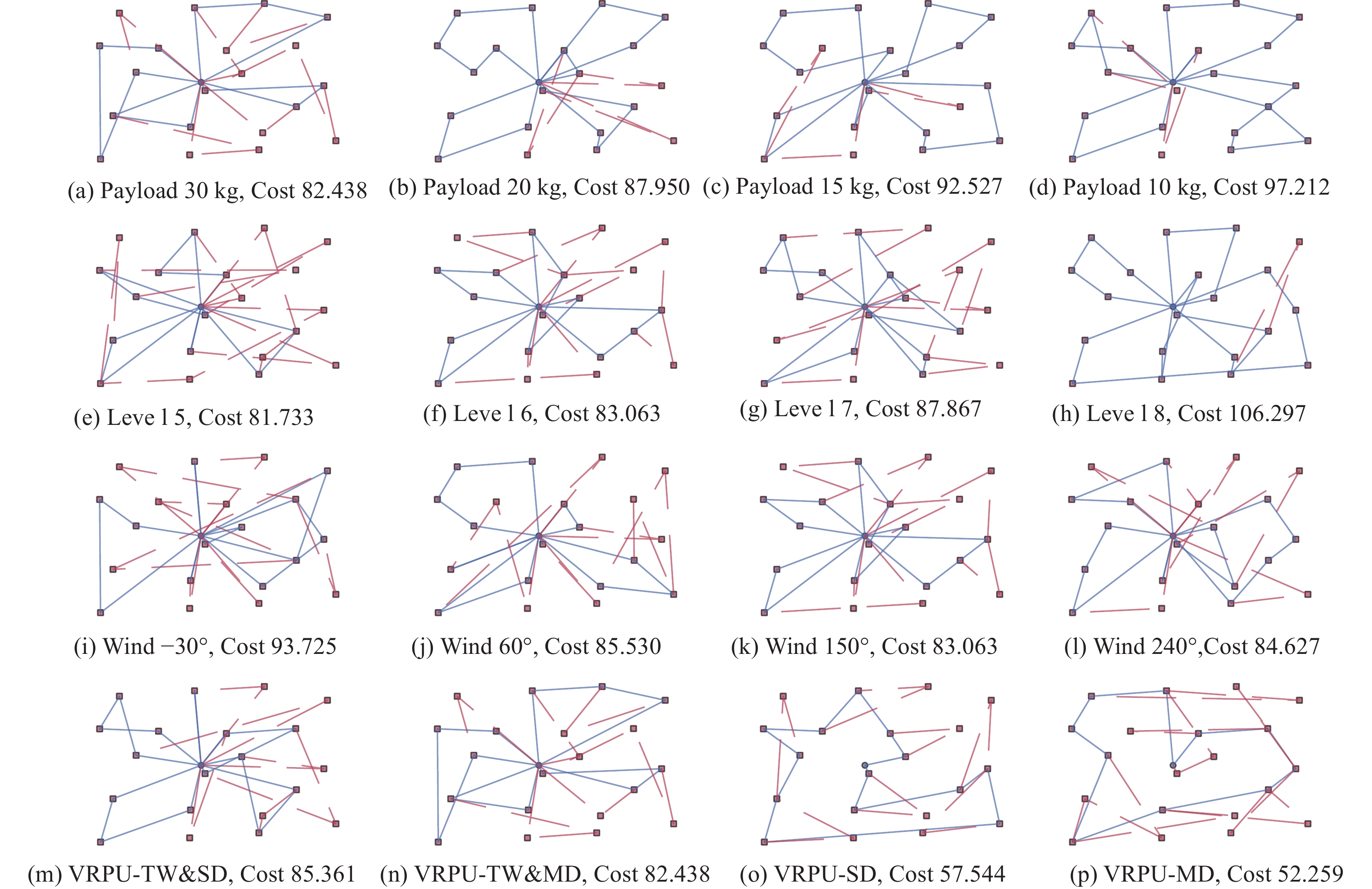
Table 9
Parameters for four wind scenarios"
| Wind level | Speed range/(m/s) | Wind speed/(m/s) |
| Level 5 | 8.0−10.7 | 9 |
| Level 6 | 10.8−13.8 | 12 |
| Level 7 | 13.9−17.1 | 15 |
| Level 8 | 17.2−20.7 | 19 |
| 1 |
AGATZ N, BOUMAN P, SCHMIDT M Optimization approaches for the traveling salesman problem with drone. Transportation Science, 2018, 52 (4): 965- 981.
doi: 10.1287/trsc.2017.0791 |
| 2 |
MASMOUDI M A, MANCINI S, BALDACCI R, et al Vehicle routing problems with drones equipped with multi-package payload compartments. Transportation Research Part E: Logistics and Transportation Review, 2022, 164, 102757.
doi: 10.1016/j.tre.2022.102757 |
| 3 | ARYA M N. China’s drone delivery platform Meituan joins NextGen FDI program. https://www.gccbusinessnews.com/meituan-uas-joins-nextgen-fdi-program/. |
| 4 |
LI D W, IGNATIUS J, WANG D, et al A branch-and-price-and-cut algorithm for the truck-drone routing problem with simultaneously delivery and pickup. Naval Research Logistics, 2024, 71 (2): 241- 285.
doi: 10.1002/nav.22151 |
| 5 |
YIN Y Q, LI D W, WANG D J, et al A branch-and-price-and-cut algorithm for the truck-based drone delivery routing problem with time windows. European Journal of Operational Research, 2023, 309 (3): 1125- 1144.
doi: 10.1016/j.ejor.2023.02.030 |
| 6 |
MURRAY C C, CHU A G The flying sidekick traveling salesman problem: optimization of drone-assisted parcel delivery. Transportation Research Part C: Emerging Technologies, 2015, 54, 86- 109.
doi: 10.1016/j.trc.2015.03.005 |
| 7 |
HA Q M, DEVILLE Y, PHAM Q D, et al On the min-cost traveling salesman problem with drone. Transportation Research Part C: Emerging Technologies, 2018, 86, 597- 621.
doi: 10.1016/j.trc.2017.11.015 |
| 8 | TU P A, DAT N T, DUNG P Q. Traveling salesman problem with multiple drones. Proc. of the 9th International Symposium on Information and Communication Technology, 2018: 46−53. |
| 9 |
MURRAY C C, RAJ R The multiple flying sidekicks traveling salesman problem: parcel delivery with multiple drones. Transportation Research Part C: Emerging Technologies, 2020, 110, 368- 398.
doi: 10.1016/j.trc.2019.11.003 |
| 10 | LAN B. Traveling salesman problem with time windows and drones (TSPTWD). Ames: Iowa State University, 2020. |
| 11 |
SCHERMER D, MOEINI M, WENDT O A matheuristic for the vehicle routing problem with drones and its variants. Transportation Research Part C: Emerging Technologies, 2019, 106, 166- 204.
doi: 10.1016/j.trc.2019.06.016 |
| 12 | SCHERMER D, MOEINI M, WENDT O A hybrid VNS/Tabu search algorithm for solving the vehicle routing problem with drones and en route operations. Computers & Operations Research, 2019, 109, 134- 158. |
| 13 |
WANG Z, SHEU J B Vehicle routing problem with drones. Transportation Research Part B: Methodological, 2019, 122, 350- 364.
doi: 10.1016/j.trb.2019.03.005 |
| 14 |
KUO R J, LU S H, LAI P Y, et al Vehicle routing problem with drones considering time windows. Expert Systems with Applications, 2022, 191, 116264.
doi: 10.1016/j.eswa.2021.116264 |
| 15 |
SACRAMENTO D, PISINGER D, ROPKE S An adaptive large neighborhood search metaheuristic for the vehicle routing problem with drones. Transportation Research Part C: Emerging Technologies, 2019, 102, 289- 315.
doi: 10.1016/j.trc.2019.02.018 |
| 16 |
CHENG C, ADULYASAK Y, ROUSSEAU L M Drone routing with energy function: formulation and exact algorithm. Transportation Research Part B: Methodological, 2020, 139, 364- 387.
doi: 10.1016/j.trb.2020.06.011 |
| 17 |
JEONG H Y, SONG B D, LEE S Truck-drone hybrid delivery routing: payload-energy dependency and no-fly zones. International Journal of Production Economics, 2019, 214, 220- 233.
doi: 10.1016/j.ijpe.2019.01.010 |
| 18 |
MENG S S, GUO X P, LI D, et al The multi-visit drone routing problem for pickup and delivery services. Transportation Research Part E: Logistics and Transportation Review, 2023, 169, 102990.
doi: 10.1016/j.tre.2022.102990 |
| 19 | WU G H, MAO N, XU B J, et al The cooperative delivery of multiple vehicles and multiple drones based on adaptive large neighborhood search. Control and Decision, 2023, 38 (1): 201- 210. |
| 20 | MA H W, MA K, GUO J Research on vehicle routing problem with drones considering multi-delivery. Computer Engineering, 2022, 48 (8): 299- 305. |
| 21 | THIBBOTUWAWA A, NIELSEN P, ZBIGNIEW B, et al. Energy consumption in unmanned aerial vehicles: a review of energy consumption models and their relation to the UAV routing. Proc. of the 39th International Conference on Information Systems Architecture and Technology–ISAT 2018: Part II, 2019: 173−184. |
| 22 |
PUGLIESE L D P, GUERRIERO F, MACRINA G Using drones for parcels delivery process. Procedia Manufacturing, 2020, 42, 488- 497.
doi: 10.1016/j.promfg.2020.02.043 |
| 23 |
THIBBOTUWAWA A, BOCEWICZ G, RADZKI G, et al UAV mission planning resistant to weather uncertainty. Sensors, 2020, 20 (2): 515.
doi: 10.3390/s20020515 |
| 24 |
ROPKE S, PISINGER D An adaptive large neighborhood search heuristic for the pickup and delivery problem with time windows. Transportation Science, 2006, 40 (4): 455- 472.
doi: 10.1287/trsc.1050.0135 |
| 25 |
LI W H, WANG R, HENG Y, et al Knowledge-guided evolutionary optimization for large-scale air defense resource allocation. IEEE Trans. on Artificial Intelligence, 2024, 5 (12): 6267- 6279.
doi: 10.1109/TAI.2024.3375263 |
| 26 | WU Y D, HE S W, ZHOU H Comprehensive optimization model and algorithm of operation plan for smart port station of heavy haul railway. Journal of Transportation Systems Engineering and Information Technology, 2023, 23 (6): 215- 226,261. |
| 27 |
BRAYSY O, DULLAERT W, HASLE G, et al An effective multirestart deterministic annealing metaheuristic for the fleet size and mix vehicle-routing problem with time windows. Transportation Science, 2008, 42 (3): 371- 386.
doi: 10.1287/trsc.1070.0217 |
| 28 |
WANG D C, MOON I, ZHANG R Y Multi-trip multi-trailer drop-and-pull container drayage problem. IEEE Trans. on Intelligent Transportation Systems, 2022, 23 (10): 19088- 19104.
doi: 10.1109/TITS.2022.3156547 |
| 29 | China Meteorological Administration. Specifications for surface meteorological observation-Wind direction and wind speed. https://www.cma.gov.cn/zfxxgk/gknr/flfgbz/bz/202209/t20220921_5099085.html. |
| 30 | ZHAO G H, QIN W X Vehicle joint UAV distribution path planning under weather factors. Logistics and Supply Chain Economy, 2023, 45 (9): 148- 155. |
| [1] | Jingfeng GUO, Rui SONG, Shiwei HE. Vehicle and onboard UAV collaborative delivery route planning: considering energy function with wind and payload [J]. Journal of Systems Engineering and Electronics, 2025, 36(1): 194-208. |
| [2] | Jianmai SHI, Jiaming ZHANG, Hongtao LEI, Zhong LIU, Rui WANG. Joint mission and route planning of unmanned air vehicles via a learning-based heuristic [J]. Journal of Systems Engineering and Electronics, 2023, 34(1): 81-98. |
| [3] | Jiaming ZHANG, Zhong LIU, Jianmai SHI, Chao CHEN. Weapon configuration, allocation and route planning with time windows for multiple unmanned combat air vehicles [J]. Journal of Systems Engineering and Electronics, 2018, 29(5): 953-968. |
| [4] | Hao Chen, Jun Li, Ning Jing, and Jun Li. User-oriented data acquisition chain task planning algorithm for operationally responsive space satellite [J]. Journal of Systems Engineering and Electronics, 2016, 27(5): 1028-1039. |
| [5] | Pei Wang, Gerhard Reinelt, and Yuejin Tan. Self-adaptive large neighborhood search algorithm for parallel machine scheduling problems [J]. Journal of Systems Engineering and Electronics, 2012, 23(2): 208-215. |
| [6] | Guanghui Wang, Xuefeng Sun, Liping Zhang, and Chao Lv. Saturation attack based route planning and threat avoidance algorithm for cruise missiles [J]. Journal of Systems Engineering and Electronics, 2011, 22(6): 948-953. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||