
Journal of Systems Engineering and Electronics ›› 2025, Vol. 36 ›› Issue (3): 791-802.doi: 10.23919/JSEE.2025.000027
• CONTROL THEORY AND APPLICATION • Previous Articles
Zhidong ZHANG1( ), Gongliu YANG1,2(), Qingzhong CAI1,*(), Jing FAN3(), Tao LI4()
), Gongliu YANG1,2(), Qingzhong CAI1,*(), Jing FAN3(), Tao LI4()
Received:2024-07-23
Accepted:2025-02-28
Online:2025-06-18
Published:2025-07-10
Contact:
Qingzhong CAI
E-mail:zzdong@buaa.edu.cn;yanggongliu@buaa.edu.cn;qingzhong_cai@buaa.edu.cn;csscseri0101@yeah.net;eason@matrix-system.com
About author:Supported by:Zhidong ZHANG, Gongliu YANG, Qingzhong CAI, Jing FAN, Tao LI. Design and implementation of disturbance sliding mode observer for enhancing the dynamic control precision of inertial stabilization platform[J]. Journal of Systems Engineering and Electronics, 2025, 36(3): 791-802.
Add to citation manager EndNote|Reference Manager|ProCite|BibTeX|RefWorks

Fig 1
Cascaded control scheme based on DSMO"
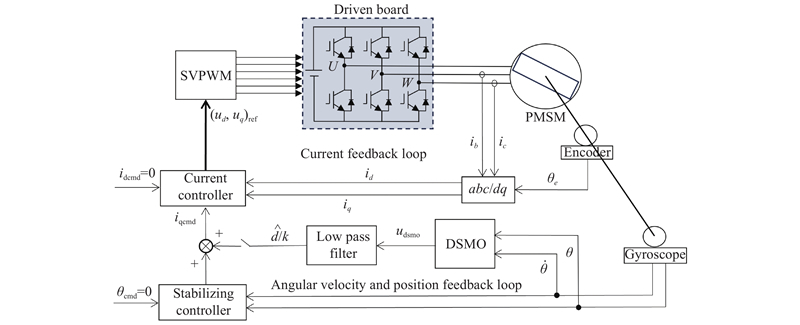
Table 1
Genuine parameters of ISP"
| Parameter | Symbol | Value |
| Rotational inertia of ISP/(kg·m2) | 0.256 | |
| Torque constant of PMSM/(N·m/A) | 1.0 | |
| System sampling time/s | ||
| Mean amplitude of gyroscope angular velocity noise/(rad/s) | ||
| Noise power of the gyroscope angular velocity/(rad2/s3) |
Table 2
Nominal parameters of ISP"
| Parameter | Symbol | Value |
| Rotational inertia of ISP/(kg·m2) | 0.3 | |
| Torque constant of PMSM/(N·m/A) | 1.1 |
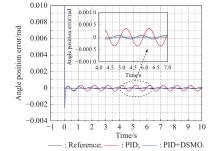
Fig 2
Comparison of angular position error with and without DSMO during the destabilization of the platform axis"
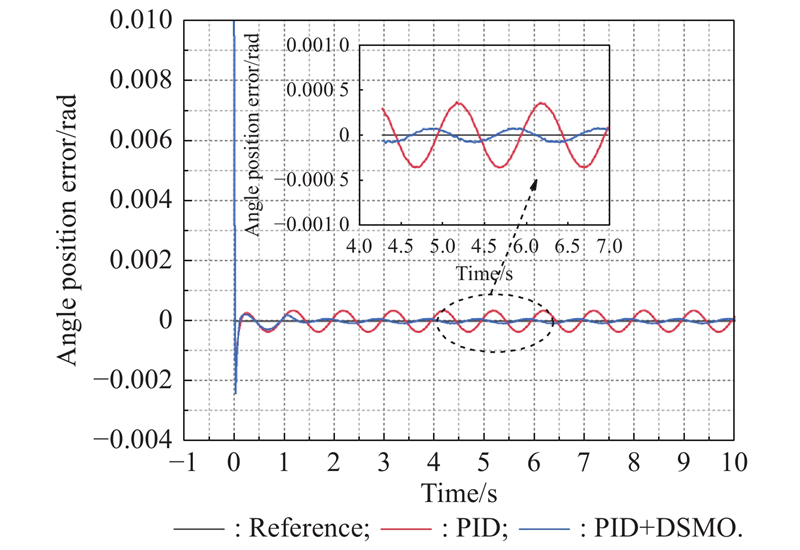
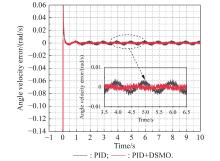
Fig 3
Comparative results of the angular velocity during the destabilization of the platform axis"
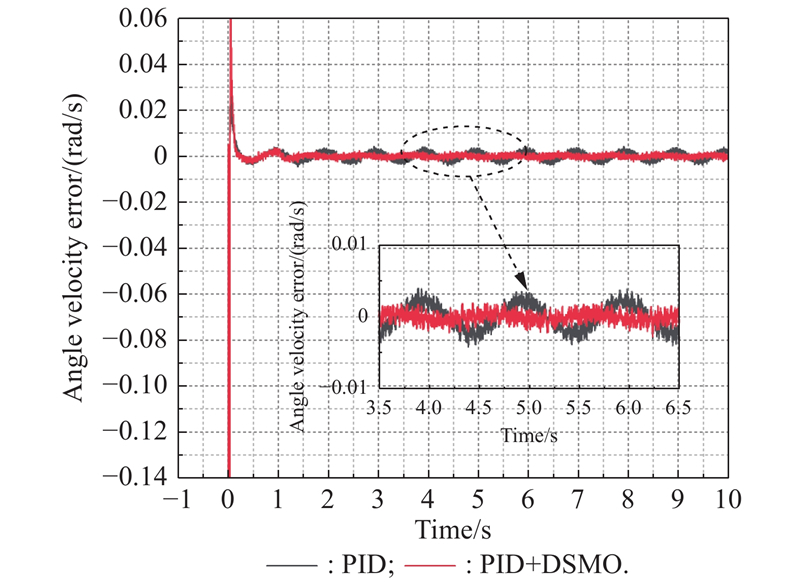
Table 3
PPE of angular position rad"
| Control scheme | PPE |
| PID | 0.000 716 |
| PID+DSMO | 0.000 158 |
Table 4
PPE of angular velocity rad/s"
| Control scheme | PPE |
| PID | 0.007 756 |
| PID+DSMO | 0.003 749 |
Fig 4
Convergence profile of the angular position estimation by the DSMO"
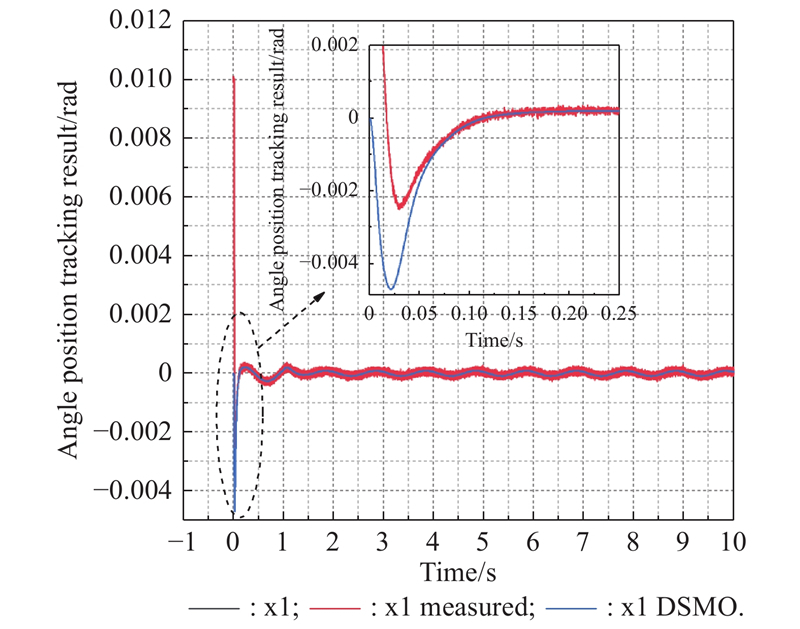
Fig 5
Convergence profile of the angular velocity estimation by the DSMO"
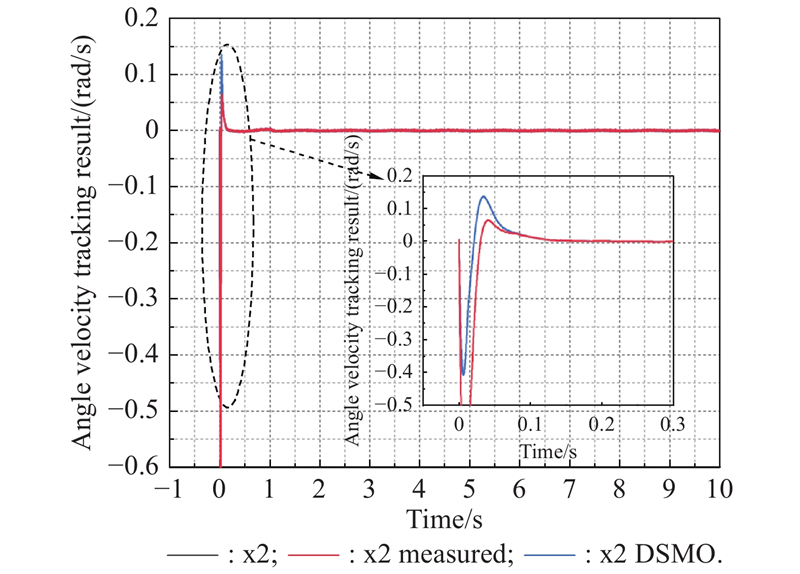
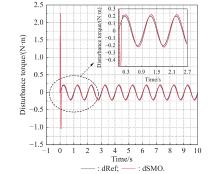
Fig 6
Estimation and convergence of disturbance in control loop by the DSMO"
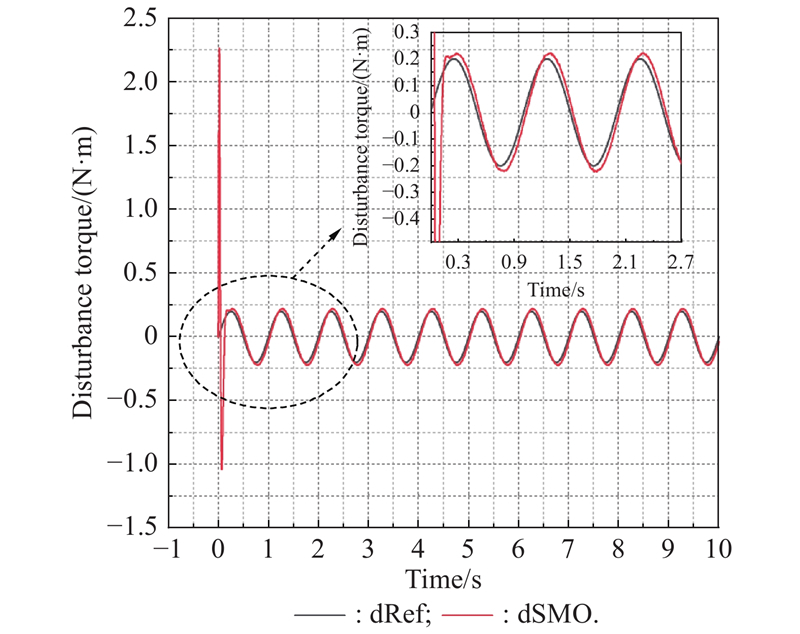
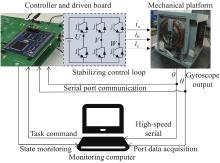
Fig 7
Composition diagram of the hardware experimental verification"
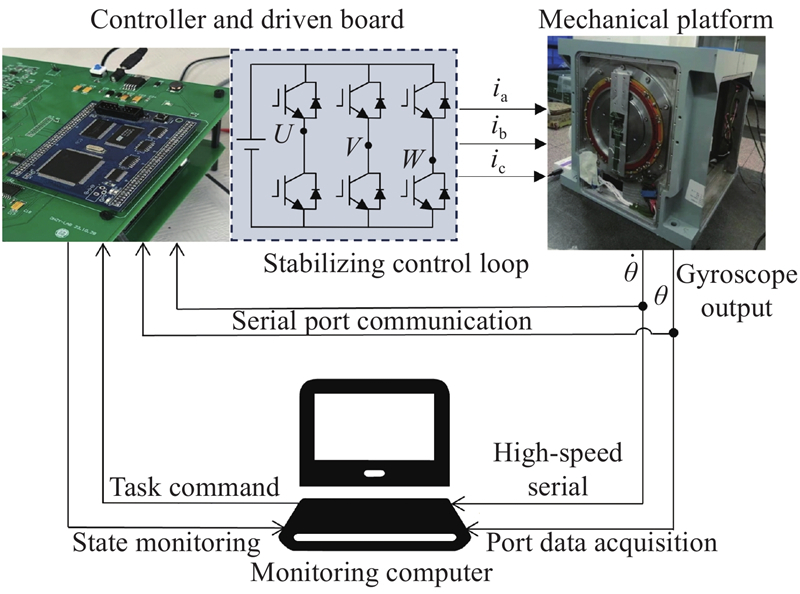
Table 5
Nominal parameters of the hardware experimental system"
| Parameter | Symbol | Value |
| Rotational inertia of ISP/(kg·m2) | 0.173 | |
| Gyroscope zero-bias stability/((°)/h) | 1/ | |
| Torque constant of PMSM/(N·m/A) | 1.14 |
Fig 8
Complete trajectory of frame angle fluctuation throughout the swing comparison experiment"
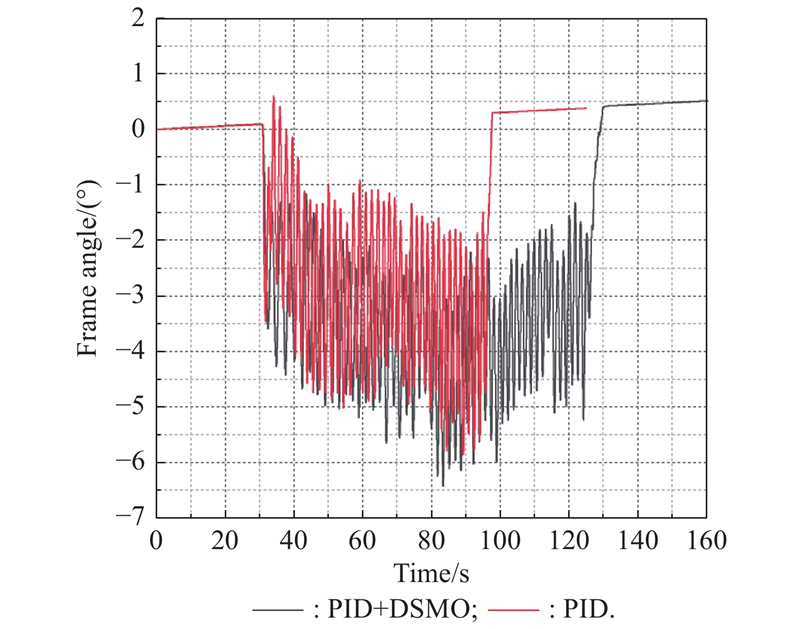
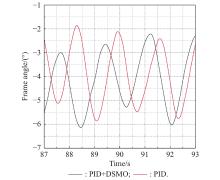
Fig 9
Fluctuation of frame angle during the swing comparison experiment"
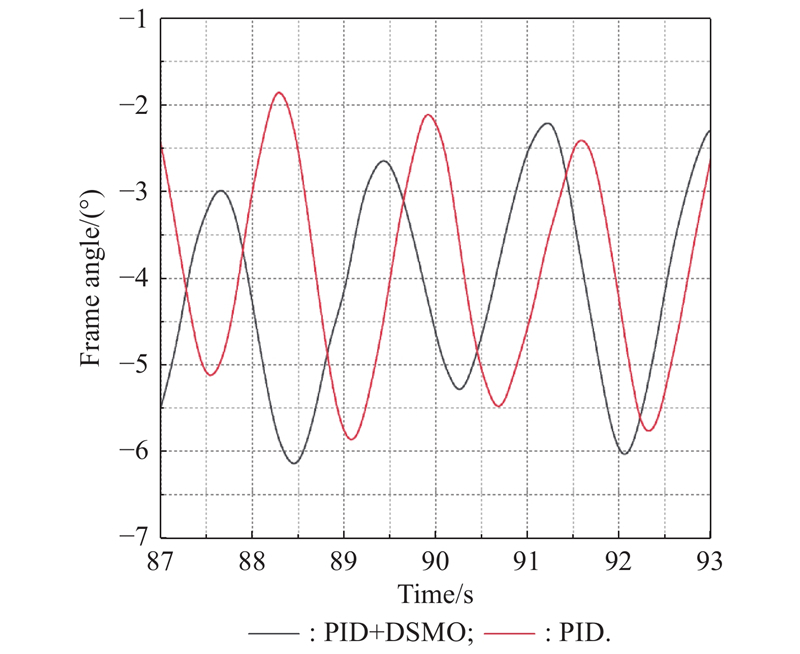
Fig 10
Comparison of angular position error with and without DSMO during swing test"
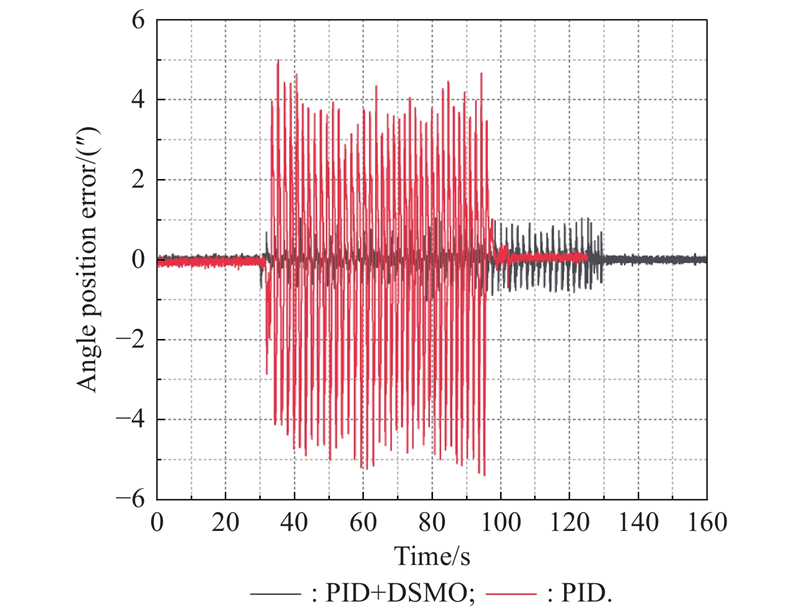
Fig 11
Comparison of platform axis angular velocity with and without DSMO during swing test"
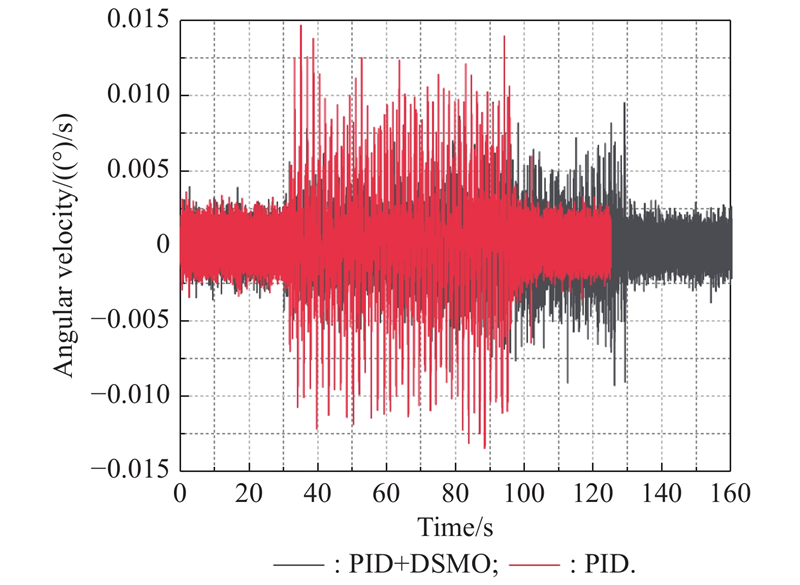
Fig 12
Detailed comparison of dynamic angular position error for platform axis with and without DSMO"
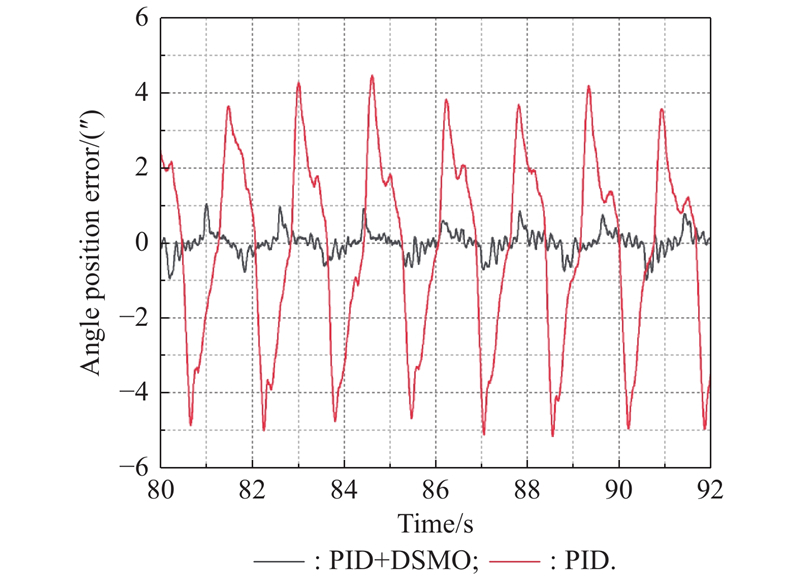
Fig 13
Detailed comparison of platform axis angular velocity with and without DSMO during swing test"
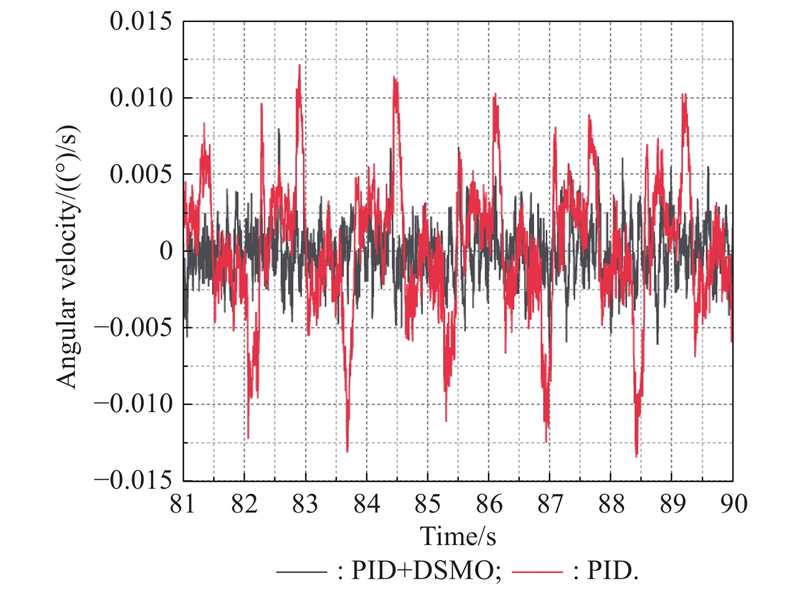
Table 6
PPE of angular position in swing test (″)"
| Control scheme | PPE |
| PID | 10 |
| PID+DSMO | 4 |
Table 7
PPE of angular velocity in swing test (°)/s"
| Control scheme | PPE |
| PID | 0.02 |
| PID+DSMO | 0.01 |
| 1 |
HUANG S, LIANG W, TAN K K Intelligent friction compensation: a review. IEEE/ASME Trans. on Mechatronics, 2019, 24 (4): 1763- 1774.
doi: 10.1109/TMECH.2019.2916665 |
| 2 | ARMSTRONG-HLOUVRY B. Control of machines with friction. New York: Springer US, 1991. |
| 3 |
CANUDAS DE WIT C, OLSSON H, ASTROM K, et al A new model for control of systems with friction. IEEE Trans. on Automatic Control, 1995, 40 (3): 419- 425.
doi: 10.1109/9.376053 |
| 4 |
WANG C, PENG J D, PAN J F A novel friction compensation method based on stribeck model with fuzzy filter for PMSM servo systems. IEEE Trans. on Industrial Electronics, 2023, 70 (12): 12124- 12133.
doi: 10.1109/TIE.2022.3232667 |
| 5 |
ZHANG Z Y, LI Z Q, ZHOU Q K, et al Application in prestiction friction compensation for angular velocity loop of inertially stabilized platforms. Chinese Journal of Aeronautics, 2014, 27 (3): 655- 662.
doi: 10.1016/j.cja.2014.04.026 |
| 6 |
WANG B F, IWASAKI M, YU J P Finite-time command-filtered backstepping control for dual-motor servo systems with LuGre friction. IEEE Trans. on Industrial Informatics, 2023, 19 (5): 6376- 6386.
doi: 10.1109/TII.2022.3182341 |
| 7 |
ZHOU X Y, ZHAO B L, LIU W, et al A compound scheme on parameters identification and adaptive compensation of nonlinear friction disturbance for the aerial inertially stabilized platform. ISA Transactions, 2017, 67, 293- 305.
doi: 10.1016/j.isatra.2017.01.003 |
| 8 |
HUANG S N, TAN K K, LEE T H Adaptive friction compensation using neural network approximations. IEEE Trans. on Systems, Man and Cybernetics, Part C (Applications and Reviews), 2000, 30 (4): 551- 557.
doi: 10.1109/5326.897081 |
| 9 | CANDELO-ZULUAGA C, RIBA J R, GARCIA A. PMSM parameter estimation for sensorless FOC based on differential power factor. IEEE Trans. on Instrumentation and Measurement, 2021, 70: 1−12. |
| 10 |
SANDRE-HERNANDEZ O, MORALES-CAPORAL R, RANGEL-MAGDALENO R, et al Parameter identification of PMSMs using experimental measurements and a PSO algorithm. IEEE Trans. on Instrumentation and Measurement, 2015, 64 (8): 2146- 2154.
doi: 10.1109/TIM.2015.2390958 |
| 11 |
WANG Q W, WANG G L, ZHAO N N, et al An impedance model-based multiparameter identification method of PMSM for both offline and online conditions. IEEE Trans. on Power Electronics, 2021, 36 (1): 727- 738.
doi: 10.1109/TPEL.2020.3000896 |
| 12 |
WALLSCHEID O, BOCKER J Global identification of a low-order lumped-parameter thermal network for permanent magnet synchronous motors. IEEE Trans. on Energy Conversion, 2016, 31 (1): 354- 365.
doi: 10.1109/TEC.2015.2473673 |
| 13 |
WASIM M, ALI A, CHOUDHRY M A, et al Robust design of sliding mode control for airship trajectory tracking with uncertainty and disturbance estimation. Journal of Systems Engineering and Electronics, 2024, 35 (1): 242- 258.
doi: 10.23919/JSEE.2024.000017 |
| 14 |
FARAJZADEH-DEVIN M-G, SANI S K H Enhanced two-loop model predictive control design for linear uncertain systems. Journal of Systems Engineering and Electronics, 2021, 32 (1): 220- 227.
doi: 10.23919/JSEE.2021.000019 |
| 15 |
LIU F, WANG H, SHI Q L, et al Comparison of an ANFIS and fuzzy PID control model for performance in a two-axis inertial stabilized platform. IEEE Access, 2017, 5, 12951- 12962.
doi: 10.1109/ACCESS.2017.2723541 |
| 16 |
FANG J C, YIN R, LEI X S An adaptive decoupling control for three-axis gyro stabilized platform based on neural networks. Mechatronics, 2015, 27, 38- 46.
doi: 10.1016/j.mechatronics.2015.02.002 |
| 17 |
GUO Q Y, LIU G, XIANG B, et al Robust control of magnetically suspended gimbals in inertial stabilized platform with wide load range. Mechatronics, 2016, 39, 127- 135.
doi: 10.1016/j.mechatronics.2016.08.003 |
| 18 |
ZHAO L, HE M H, CAO X Y Research on inertial reference units prescribed performance integral sliding mode angle control. Advances in Space Research, 2023, 71 (10): 4210- 4221.
doi: 10.1016/j.asr.2023.01.003 |
| 19 |
ZHAO Z Q, ZHANG L, NAN H J, et al System modeling and motion control of a cable-driven parallel platform for underwater camera stabilization. IEEE Access, 2021, 9, 132954- 132966.
doi: 10.1109/ACCESS.2021.3115359 |
| 20 |
MAO J L, LI S H, LI Q, et al Design and implementation of continuous finite-time sliding mode control for 2-DOF inertially stabilized platform subject to multiple disturbances. ISA Transactions, 2019, 84, 214- 224.
doi: 10.1016/j.isatra.2018.09.014 |
| 21 |
DING Z S, ZHAO F, LANG Y D, et al Anti-disturbance neural-sliding mode control for inertially stabilized platform with actuator saturation. IEEE Access, 2019, 7, 92220- 92231.
doi: 10.1109/ACCESS.2019.2927427 |
| 22 |
LIU X Y, MAO J L, YANG J, et al Robust predictive visual servoing control for an inertially stabilized platform with uncertain kinematics. ISA Transactions, 2021, 114, 347- 358.
doi: 10.1016/j.isatra.2020.12.039 |
| 23 |
QU J H, XIA Y Q, SHI Y P, et al Modified ADRC for inertial stabilized platform with corrected disturbance compensation and improved speed observer. IEEE Access, 2020, 8, 157703- 157716.
doi: 10.1109/ACCESS.2020.3020143 |
| 24 |
KNIGSEDER F, KEMMETMLLER W, KUGI A Attitude control strategy for a camera stabilization platform. Mechatronics, 2017, 46, 60- 69.
doi: 10.1016/j.mechatronics.2017.06.012 |
| 25 |
QIANG H P, JIN S, FENG X Y, et al Model predictive control of a shipborne hydraulic parallel stabilized platform based on ship motion prediction. IEEE Access, 2020, 8, 181880- 181892.
doi: 10.1109/ACCESS.2020.2992458 |
| 26 |
TOLOEI A R, PIRZADEH M, VALI A R Design of predictive control and evaluate the effects of flight dynamics on performance of one axis gimbal system considering disturbance torques. Aerospace Science and Technology, 2016, 54, 143- 150.
doi: 10.1016/j.ast.2016.04.019 |
| 27 |
ALTAN A, HACIOGLU R Model predictive control of three-axis gimbal system mounted on UAV for real-time target tracking under external disturbances. Mechanical Systems and Signal Processing, 2020, 138, 106548.
doi: 10.1016/j.ymssp.2019.106548 |
| 28 |
GALCHENKO P, PERNICKA H Neural network attitude control system design for the wallops arc-second pointer. Journal of Guidance, Control and Dynamics, 2022, 45 (7): 1365- 1370.
doi: 10.2514/1.G006465 |
| 29 |
XIANG B, MU Q Q Gimbal control of inertially stabilized platform for airborne remote sensing system based on adaptive RBFNN feedback model. IFAC Journal of Systems and Control, 2021, 16, 100148.
doi: 10.1016/j.ifacsc.2021.100148 |
| 30 |
SAINI K, KUMAR N, BHUSHAN B, et al Artificial neural network-based adaptive control for nonlinear dynamical systems. International Journal of Adaptive Control and Signal Processing, 2024, 38 (8): 2693- 2715.
doi: 10.1002/acs.3823 |
| 31 |
BHANU P, PAPPA N SVPWM: torque level controlling of wind turbine system using fuzzy and ABC-DQ transformation. International Journal of Fuzzy Systems, 2017, 19 (1): 141- 154.
doi: 10.1007/s40815-016-0157-1 |
| [1] | Pu YANG, Xukai HU, Zixin WANG, Zhiqing ZHANG. Sliding mode fault tolerant consensus control for multi-agent systems based on super-twisting observer [J]. Journal of Systems Engineering and Electronics, 2022, 33(6): 1309-1319. |
| [2] | FARAJZADEH-DEVIN Mohammad-Ghassem, HOSSEINI SANI Seyed Kamal. Enhanced two-loop model predictive control design for linear uncertain systems [J]. Journal of Systems Engineering and Electronics, 2021, 32(1): 220-227. |
| [3] | Bomin Huang, Lingmei Chen, and Weiyao Lan. Global robust output regulation for a class of affine singular nonlinear systems [J]. Systems Engineering and Electronics, 2017, 28(4): 745-. |
| [4] | Xiaolei Li, Xiaoyuan Luo, Shaobao Li, Jianjin Li, and Xinping Guan. Consensus of second-order nonlinear multi-agent systems via sliding mode observer and controller [J]. Systems Engineering and Electronics, 2017, 28(4): 756-. |
| [5] | Hui Sun, Jianguo Yan, Yaohong Qu, and Jie Ren. Sensor fault-tolerant observer applied in UAV anti-skid braking control under control input constraint [J]. Systems Engineering and Electronics, 2017, 28(1): 126-. |
| [6] | Jiaoru Huang, Fucai Qian, Guo Xie, and Hengzhan Yang. Robust adaptive control for dynamic systems with mixed uncertainties [J]. Systems Engineering and Electronics, 2016, 27(3): 656-663. |
| [7] | Mou Chen and Bin Jiang. Robust bounded control for uncertain flight dynamics using disturbance observer [J]. Journal of Systems Engineering and Electronics, 2014, 25(4): 640-. |
| [8] | Jie Wang, Qun Zong, Bailing Tian, and Helong Liu. Flight control for a flexible air-breathing hypersonic vehicle based on quasi-continuous high-order sliding mode [J]. Journal of Systems Engineering and Electronics, 2013, 24(2): 288-295. |
| [9] | Jun Jiang, Jian Guo, Bin Yao, and Qingwei Chen. Adaptive robust control of mobile satellite communication system with disturbance and model uncertainties [J]. Journal of Systems Engineering and Electronics, 2012, 23(5): 761-767. |
| [10] | Zhaoqiang Ge. Perturbation and robust controllability of singular distributed parameter control systems in Hilbert space [J]. Journal of Systems Engineering and Electronics, 2011, 22(4): 647-653. |
| [11] | Xueyan Zhao, Feiqi Deng. Solution of the HJI equations for nonlinear H∞ control design by state-dependent Riccati equations approach [J]. Journal of Systems Engineering and Electronics, 2011, 22(4): 654-660. |
| [12] | Zhang Ren, Wei Wang, and Zhen Shen. New robust fault-tolerant controller for self-repairing flight control systems [J]. Journal of Systems Engineering and Electronics, 2011, 22(1): 77-82. |
| [13] | Jianqiao Yu, Guanchen Luo, and Wentao Yin. Missile robust gain scheduling autopilot design using full block multipliers [J]. Journal of Systems Engineering and Electronics, 2010, 21(5): 883-891. |
| [14] | Duan Guangren & Li Yanjiang. Robust passive control for discrete-time T-S fuzzy systems with delays [J]. Journal of Systems Engineering and Electronics, 2009, 20(5): 1045-1051. |
| [15] | Pang Haiping & Chen Xia. Global robust optimal sliding mode control for uncertain affine nonlinear systems [J]. Journal of Systems Engineering and Electronics, 2009, 20(4): 838-843. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||