
Journal of Systems Engineering and Electronics ›› 2026, Vol. 37 ›› Issue (1): 9-17.doi: 10.23919/JSEE.2026.000014
• PERCEPTION, CONTROL, AND DECISION-MAKING OF EMBODIED INTELLIGENT SYSTEMS • Previous Articles Next Articles
Yudong HU( ), Maofeng PANG(), Qingfeng DU(), Changsheng GAO()
), Maofeng PANG(), Qingfeng DU(), Changsheng GAO()
Received:2025-11-12
Online:2026-02-18
Published:2026-03-09
Contact:
Yudong HU
E-mail:huyudong@hit.edu.cn;24s118196@stu.hit.edu.cn;duqingfeng0208@163.com;gaocs@hit.edu.cn
About author:Supported by:Yudong HU, Maofeng PANG, Qingfeng DU, Changsheng GAO. Re-entry gliding vehicle trajectory prediction based on maneuver detection[J]. Journal of Systems Engineering and Electronics, 2026, 37(1): 9-17.
Add to citation manager EndNote|Reference Manager|ProCite|BibTeX|RefWorks

Fig 1
Flow chart of the trajectory prediction algorithm with maneuver detection decision mechanism"
Fig 2
Maneuver mode mutation detection results"

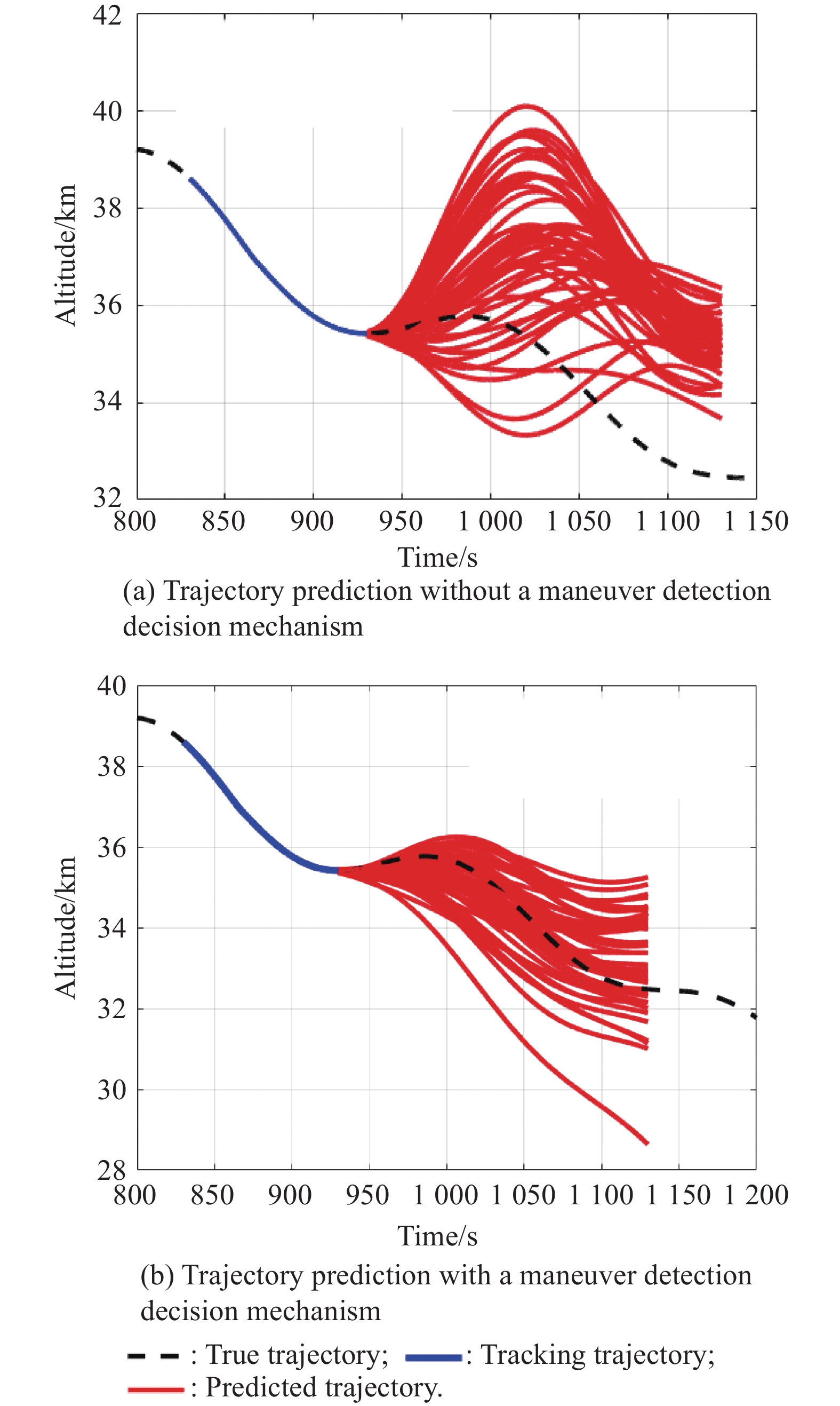
Fig 3
Three-dimensional trajectory prediction results"

Fig 4
Ground track prediction results"
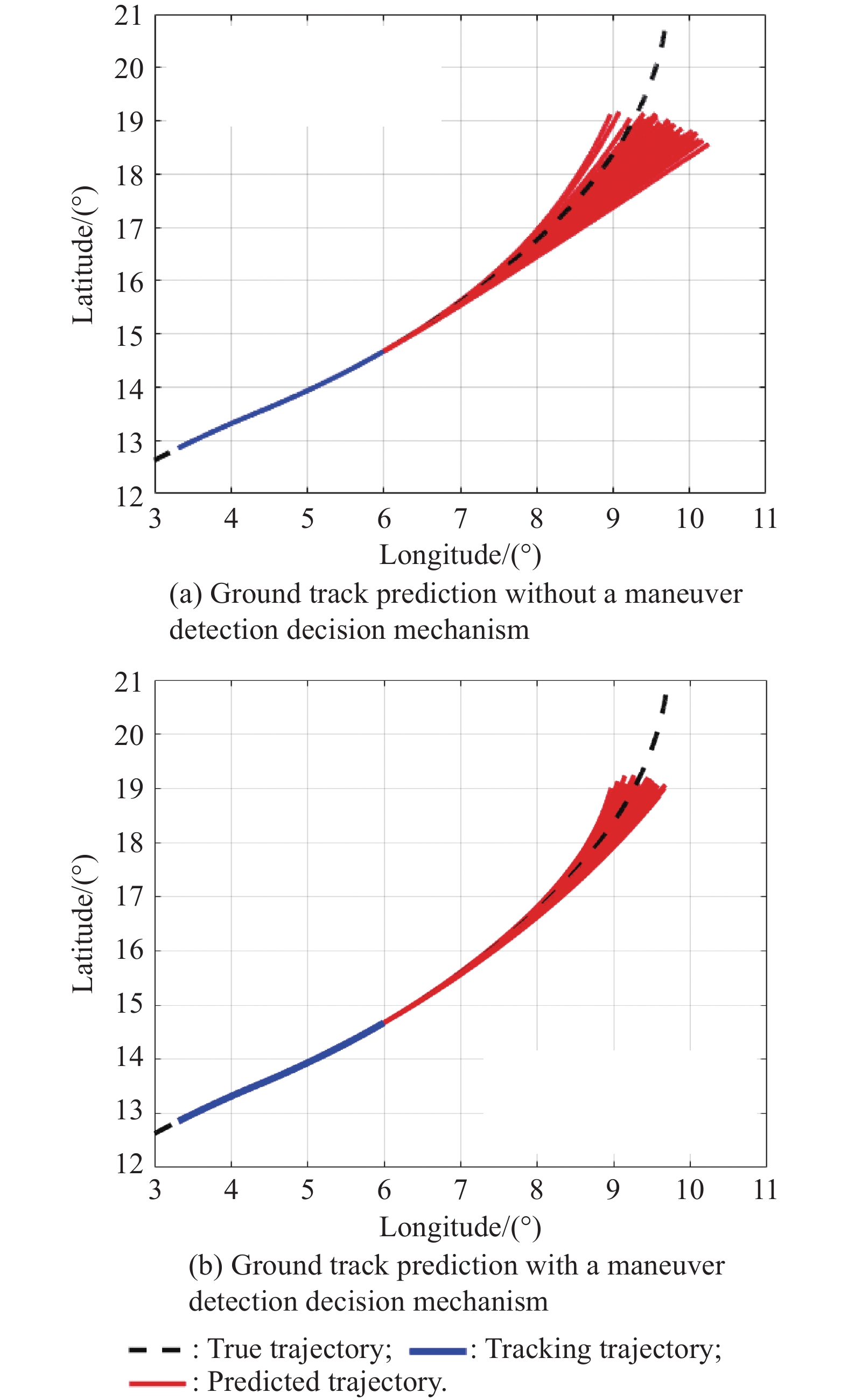
Table 1
Trajectory prediction mean absolute errors without a maneuver detection decision km"
| Prediction horizon | Time/s | |||
| 50 | 100 | 150 | 200 | |
| Longitudinal trajectory error | 0.932 | 2.360 | 3.165 | 2.917 |
| Ground track error | 1.953 | 10.181 | 27.201 | 56.173 |
| Overall error | 2.916 | 9.729 | 26.026 | 54.318 |
Table 2
Trajectory prediction mean absolute errors with a maneuver detection decision km"
| Prediction horizon | Time/s | |||
| 50 | 100 | 150 | 200 | |
| Longitudinal trajectory error | 0.393 | 0.877 | 1.232 | |
| Ground track error | 1.176 | 3.755 | 9.556 | 20.151 |
| Overall error | 1.318 | 3.902 | 9.663 | 20.305 |

Fig 5
Longitudinal trajectory prediction results"
| 1 |
ZHANG R, LI H F, ZHANG R Linear near-equilibrium glide model for unpowered entry trajectory control. Aerospace Science and Technology, 2017, 70, 526- 533.
doi: 10.1016/j.ast.2017.08.017 |
| 2 |
MA S D, YANG Y X, YANG H, et al Trajectory optimization of hypersonic vehicle considering the quasi-static assumption of pitch motion. Aerospace Science and Technology, 2024, 146, 108969.
doi: 10.1016/j.ast.2024.108969 |
| 3 | SHAO L, LEI H M, ZHAO J Research progress on trajectory prediction methods for near-space hypersonic vehicles. Aerospace Weapons, 2021, 28 (2): 34- 39. |
| 4 | YAO Y, ZHENG T Y, HE F H, et al Several hot issues and challenges in terminal guidance of flight vehicles. Acta Aeronautica et Astronautica Sinica, 2015, 36 (8): 2696- 2716. |
| 5 | LIANG X G, TIAN H L Development status of near-space hypersonic vehicles and analysis of their defense issues. Aerospace Weapons, 2016, (4): 3- 10. |
| 6 |
CHEN W X, HU Y D, GAO C S, et al Luring cooperative capture guidance strategy for the pursuit—evasion game under incomplete target information. Astrodynamics, 2024, 8, 675- 688.
doi: 10.1007/s42064-024-0224-6 |
| 7 | ZHANG H Trajectory prediction of glide vehicle based on typical control law. Modern Defense Technology, 2017, 45 (4): 112- 118. |
| 8 | CHEN N H, ZHAO L Y, YONG E M, et al Trajectory sequence prediction algorithm for maneuvering hypersonic glide targets. Aeronautical Armament, 2021, 28 (2): 40- 48. |
| 9 | ZHAO Y J, YANG H W, LI S et al. On-board modeling of gravity fields of elongated asteroids using Hopfield neural networks. Astrodynamics, 2023, 7, 101- 114. |
| 10 | CHEN J, SUN X, XUE Z, et al Target intention prediction of air combat based on Mog-GRU-D network under incomplete information. Journal of Systems Engineering and Electronics, 2025, 36 (4): 972- 984. |
| 11 |
LI J, HE Y C, SHAO L, et al Reentry glide vehicle trajectory prediction method via multidimensional intention fusion. Aerospace Science and Technology, 2025, 159, 109960.
doi: 10.1016/j.ast.2025.109960 |
| 12 |
ZHANG P, WU D, BAOYIN H G Real-time hybrid method for maneuver detection and estimation of non-cooperative space targets. Astrodynamics, 2024, 8, 437- 453.
doi: 10.1007/s42064-024-0203-y |
| 13 | ZHANG K, XIONG J J Multi-layer recursive trajectory prediction for hypersonic glide targets. Modern Defense Technology, 2018, 46 (4): 92- 98. |
| 14 | WANG K Y, XU Z, TANG S, et al A ballistic prediction method for near-space short-range glide vehicles based on flight mission. Journal of Astronautics, 2021, 42 (1): 50- 60. |
| 15 |
SUN L H, YANG B Q, MA J Trajectory prediction in pipeline form for intercepting hypersonic gliding vehicles based on LSTM. Chinese Journal of Aeronautics, 2023, 36 (5): 421- 433.
doi: 10.1016/j.cja.2023.02.017 |
| 16 | RAO C V, RAWLINGS J B, LEE J H Constrained linear state estimation—a moving horizon approach. Automatica, 2001, 37 (10): 1619- 1628. |
| 17 | XU X W. Research of the Sins/Beidou integrated navigation filtering algorithm based on moving horizon estimation. Huhehaote: Inner Mongolia University, 2020. (in Chinese) |
| 18 |
LU H K, WANG P, FU X W, et al A first order generalized pseudo-Bayesian method based on moving horizon estimation for surrounding vehicle states estimation in complex environments. Measurement, 2023, 213, 112678.
doi: 10.1016/j.measurement.2023.112678 |
| 19 | SUN C Q, XIAO Y, YE D, et al Fault tolerant model predictive control of satellite pose integration via moving horizon estimation. Journal of Astronautics, 2023, 44 (6): 885- 894. |
| 20 | JIAO Z Q, LI W H, WANG P A multi model method of tracking maneuvering target based on multiple model and moving horizon estimation. Journal of Air Force Engineering University (Natural Science Edition), 2016, 17 (2): 15- 20. |
| 21 | ZHANG J B, XIONG J J, LAN X H, et al An intelligent trajectory prediction method for hypersonic glide vehicles. Journal of Astronautics, 2022, 43 (4): 413- 422. |
| 22 | LI M J, ZHOU C J, LEI H M, et al Intelligent trajectory prediction algorithm for reentry glide targets based on control parameter estimation. Systems Engineering and Electronics, 2023, 45 (1): 221- 233. |
| 23 | REN J H, WU X, LIU Y, et al Long-term trajectory prediction of hypersonic glide vehicle based on physics-informed transformer. IEEE Trans. on Aerospace and Electronic Systems, 2023, 59 (6): 9551- 9561. |
| 24 | XIE Y F, ZHUANG X B, XI Z P, et al Dual-channel and bidirectional neural network for hypersonic glide vehicle trajectory prediction. IEEE Access, 2021, 9, 92913- 92924. |
| 25 | TAN J Q, LIU T P, JIANG W D, et al Azimuth-dimensional RCS prediction method based on physical model priors. Journal of Systems Engineering and Electronics, 2025, 36 (1): 1- 14. |
| 26 | HU G S. Digital signal processing theory, algorithms, and implementation. 2nd ed. Beijing: Tsinghua University Press, 2003. (in Chinese) |
| 27 | WANG X T, CAI Z M Moving target detection method based on higher-order statistics in reverberation background. Journal of National University of Defense Technology, 2020, 42 (2): 135- 141. |
| 28 | SONG L P, JI H B, GAO X B A new method for target maneuver detection based on higher-order cumulants. Acta Electronica Sinica, 2004, 1, 154- 156. |
| 29 | TANG R. Trajectory tracking control of hypersonic vehicles based on adaptive dynamic programming. Changsha: Central South University, 2023. (in Chinese) |
| 30 | QIU J L. Trajectory tracking and prediction of near-space hypersonic glide vehicles. Harbin: Harbin Institute of Technology, 2023. (in Chinese) |
| 31 | WU P Y, ZHANG Y, LI J, et al A real-time maneuver detection method for low data rate. Acta Astronautica, 2025, 237, 289- 299. |
| 32 | HE Z Y, YANG Y, CHEN W, et al A multi-frame hybrid integration method combined with differential evolution for maneuvering target detection with GNSS-based passive radar. Advances in Space Research, 2025, 76 (1): 110- 127. |
| [1] | Jun TANG, Wanting QIN, Qingtao PAN, Songyang LAO. A deep multimodal fusion and multitasking trajectory prediction model for typhoon trajectory prediction to reduce flight scheduling cancellation [J]. Journal of Systems Engineering and Electronics, 2024, 35(3): 666-678. |
| [2] | Zhifei XI, An XU, Yingxin KOU, Zhanwu LI, Aiwu YANG. Target maneuver trajectory prediction based on RBF neural network optimized by hybrid algorithm [J]. Journal of Systems Engineering and Electronics, 2021, 32(2): 498-516. |
| [3] | Fan LI, Jiajun XIONG, Xuhui LAN, Hongkui BI, Xin CHEN. NSHV trajectory prediction algorithm based on aerodynamic acceleration EMD decomposition [J]. Journal of Systems Engineering and Electronics, 2021, 32(1): 103-117. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||