
Journal of Systems Engineering and Electronics ›› 2026, Vol. 37 ›› Issue (2): 652-669.doi: 10.23919/JSEE.2026.000097
• CONTROL THEORY AND APPLICATION • Previous Articles
Ruichao FAN1( ), Kerun LIU1,2,*(), Ming LIU1()
), Kerun LIU1,2,*(), Ming LIU1()
Received:2024-07-12
Online:2026-04-18
Published:2026-04-30
Contact:
Kerun LIU
E-mail:ruichao_fan@163.com;Ericlkr@outlook.com;mingliu23@hit.edu.cn
About author:Supported by:Ruichao FAN, Kerun LIU, Ming LIU. FZ-BiRRT*-based 6DOF relative motion planning for spacecraft close approaching maneuver[J]. Journal of Systems Engineering and Electronics, 2026, 37(2): 652-669.
Add to citation manager EndNote|Reference Manager|ProCite|BibTeX|RefWorks
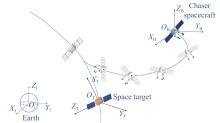
Fig 1
Schematic diagram of spacecraft close approach maneuver"
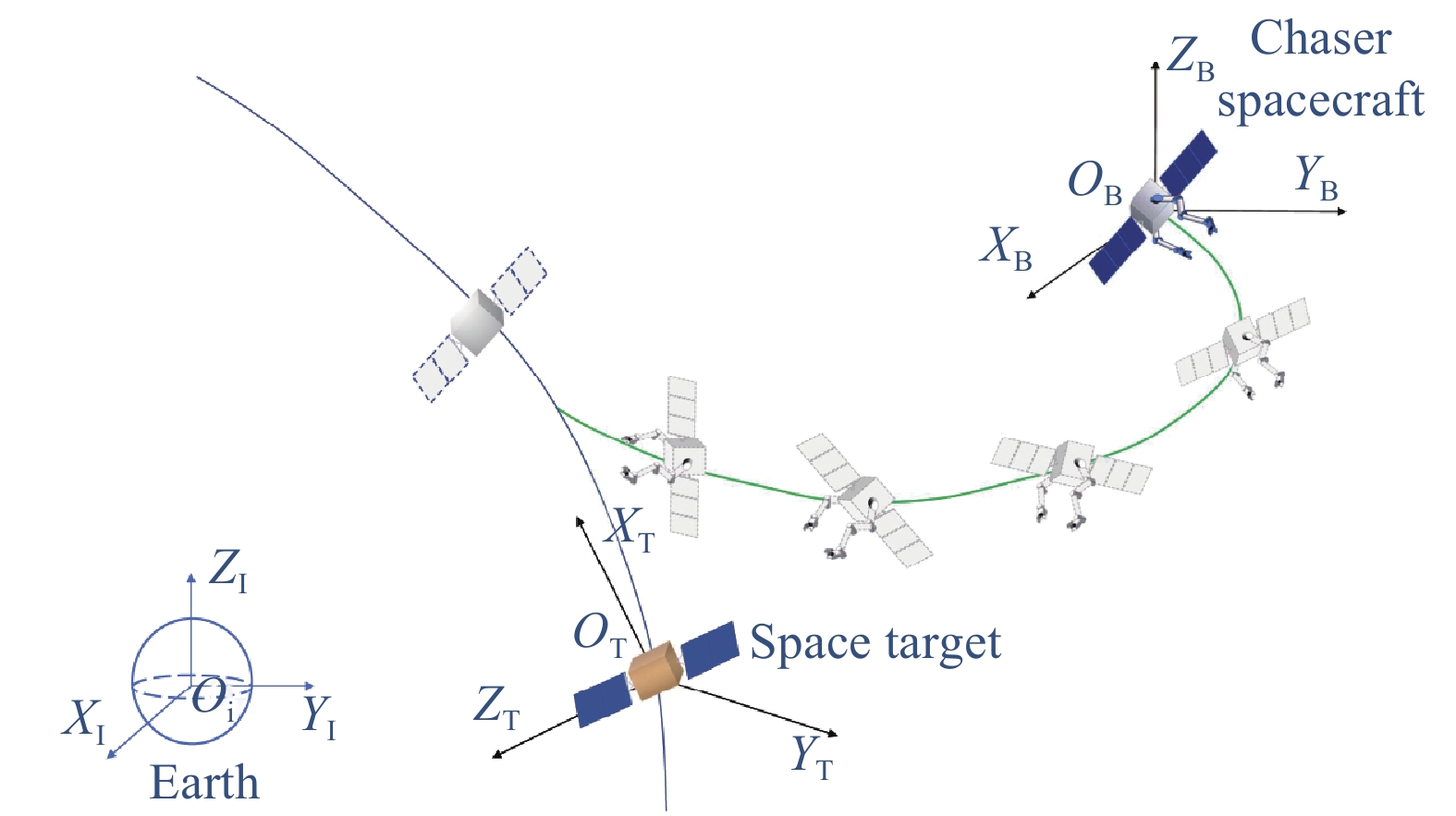
Fig 2
Schematics diagram of ?ight zoning"
Table 1
Orbital elements of target and spacecraft at initial condition"
| Element | ||||||
| Target | 0.01 | 30 | 120 | 45 | 90 | |
| Spacecraft | 0.01 | 30 | 120 | 45 |
Table 2
Parameters in each flight zone"
| Parameter | |||||
| 1 | 2 | 3 | 4 | 5 | |
| Value range of | |||||
| Value range of | |||||
| Value range of | |||||
| 8 | 5 | 2 | 1 | 0.2 | |
| 0.1 | 0.1 | 0.1 | 0.1 | 0.05 | |
| 0.1 | 0.1 | 0.1 | 0.1 | 0.05 | |
| 0.1 | 0.1 | 0.1 | 0.1 | 0.05 | |
| 0.2 | 0.1 | 0.1 | 0.1 | 0.02 | |
| 0.02 | 0.01 | 0.01 | 0.01 | 0.005 | |
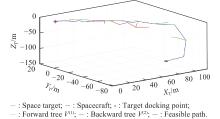
Fig 3
Schematic diagram of planned trajectory"
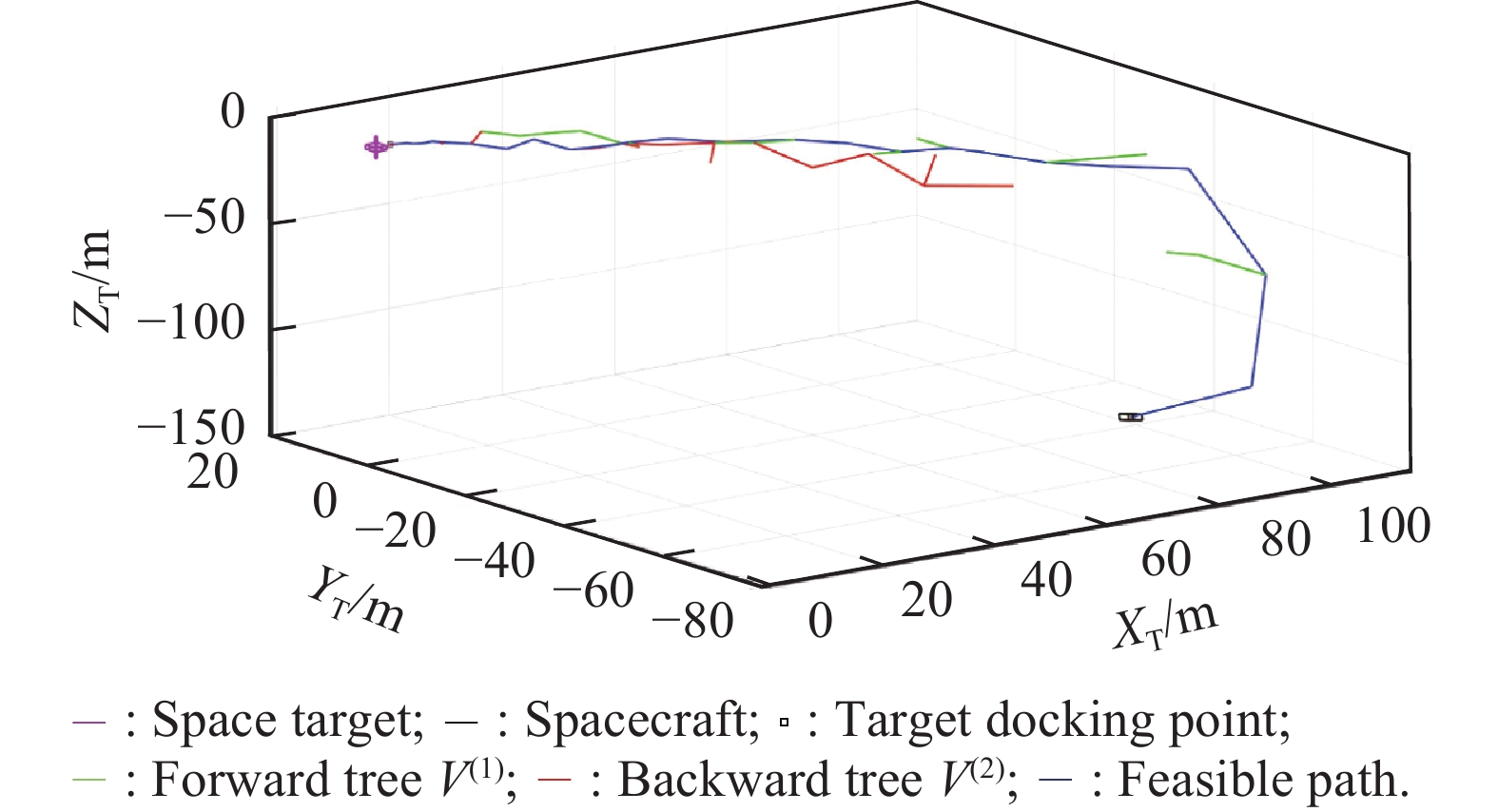
Fig 4
Optimize trends during the planning process"

Fig 5
Node distribution in the first 500 iterations (classic BiRRT*)"
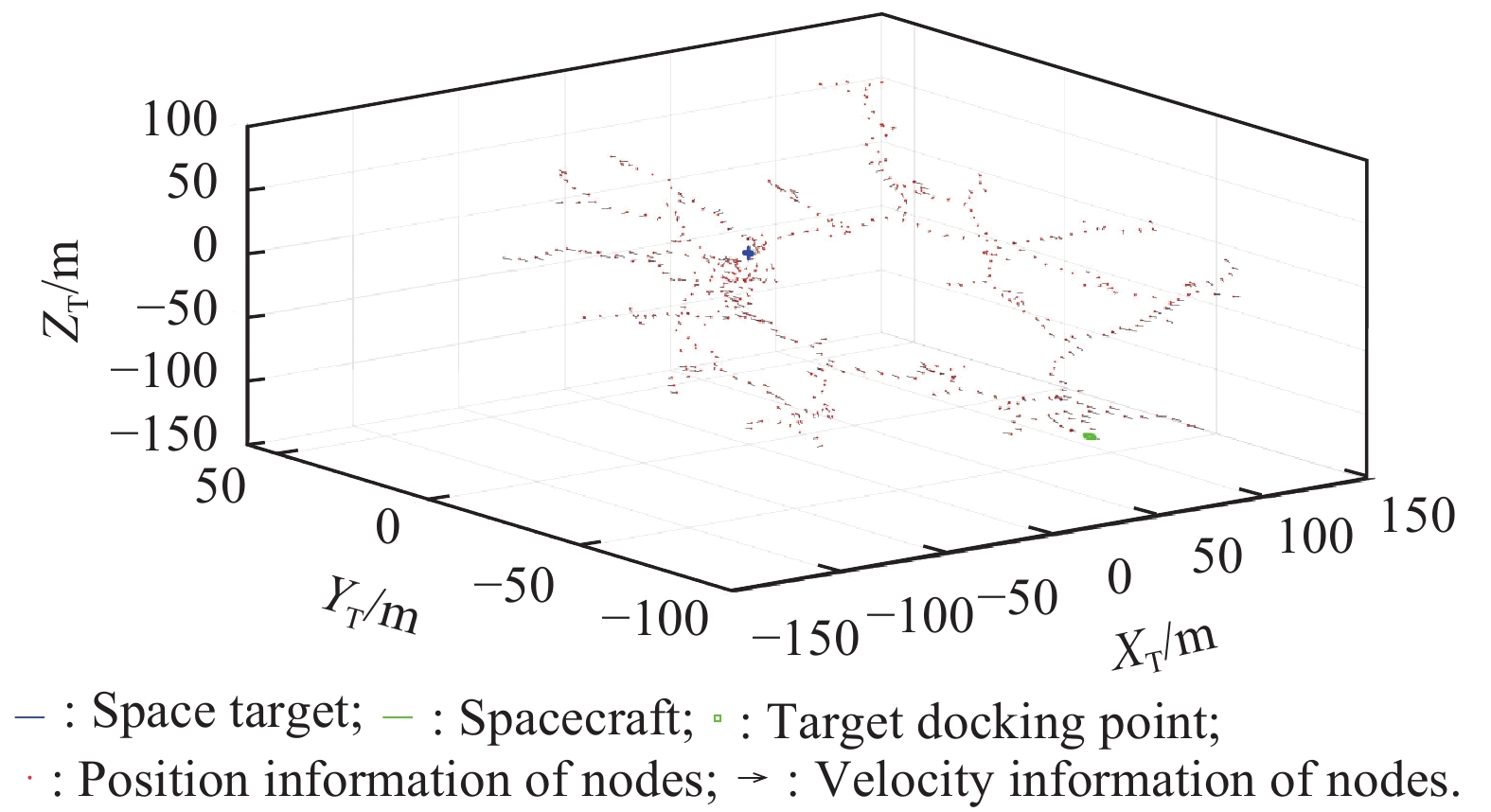

Fig 6
Node distribution in the first 500 iterations (FZ-BiRRT*)"
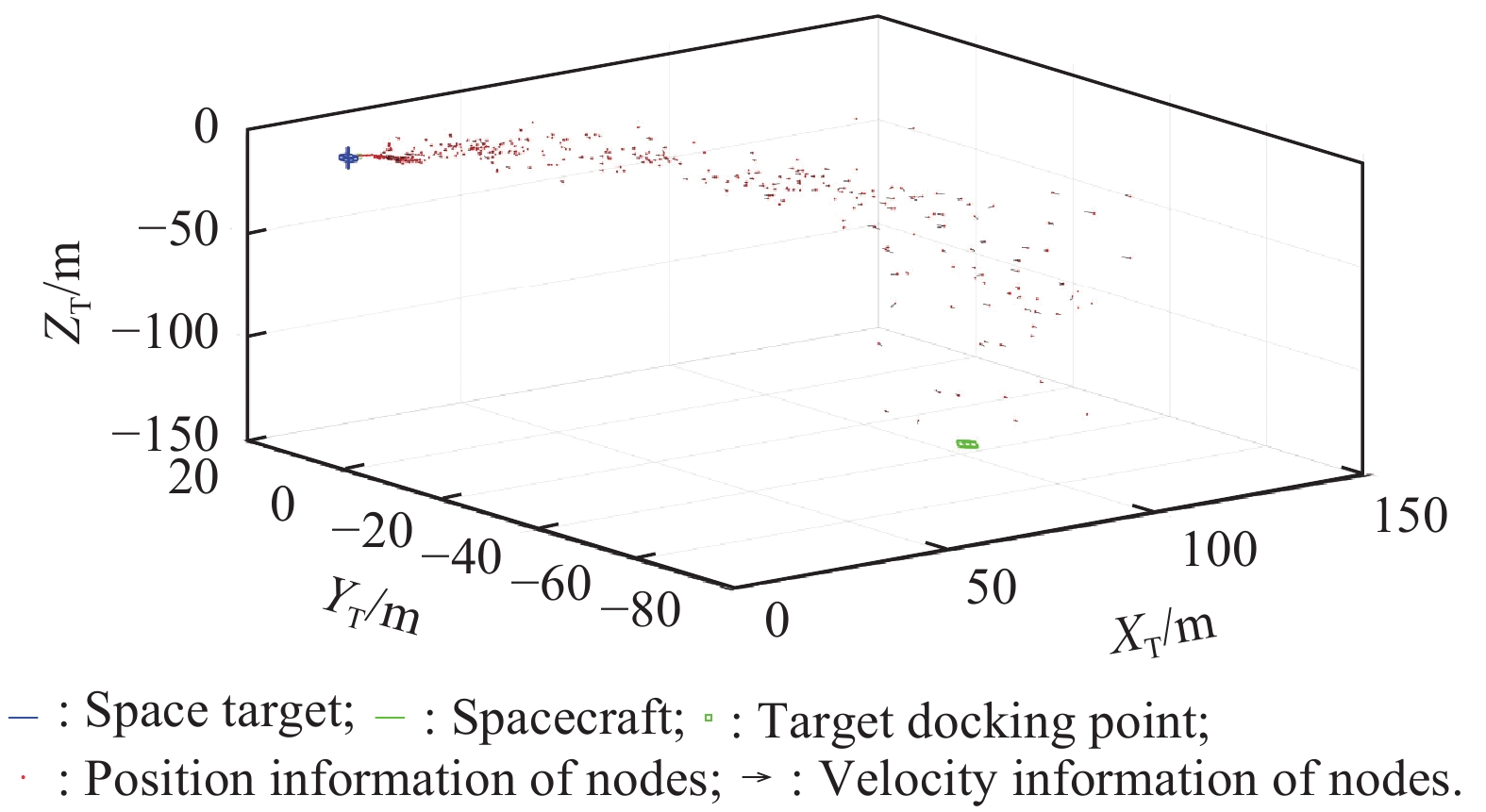
Fig 7
Three-dimensional schematic diagram of position trajectory before and after ?tting"
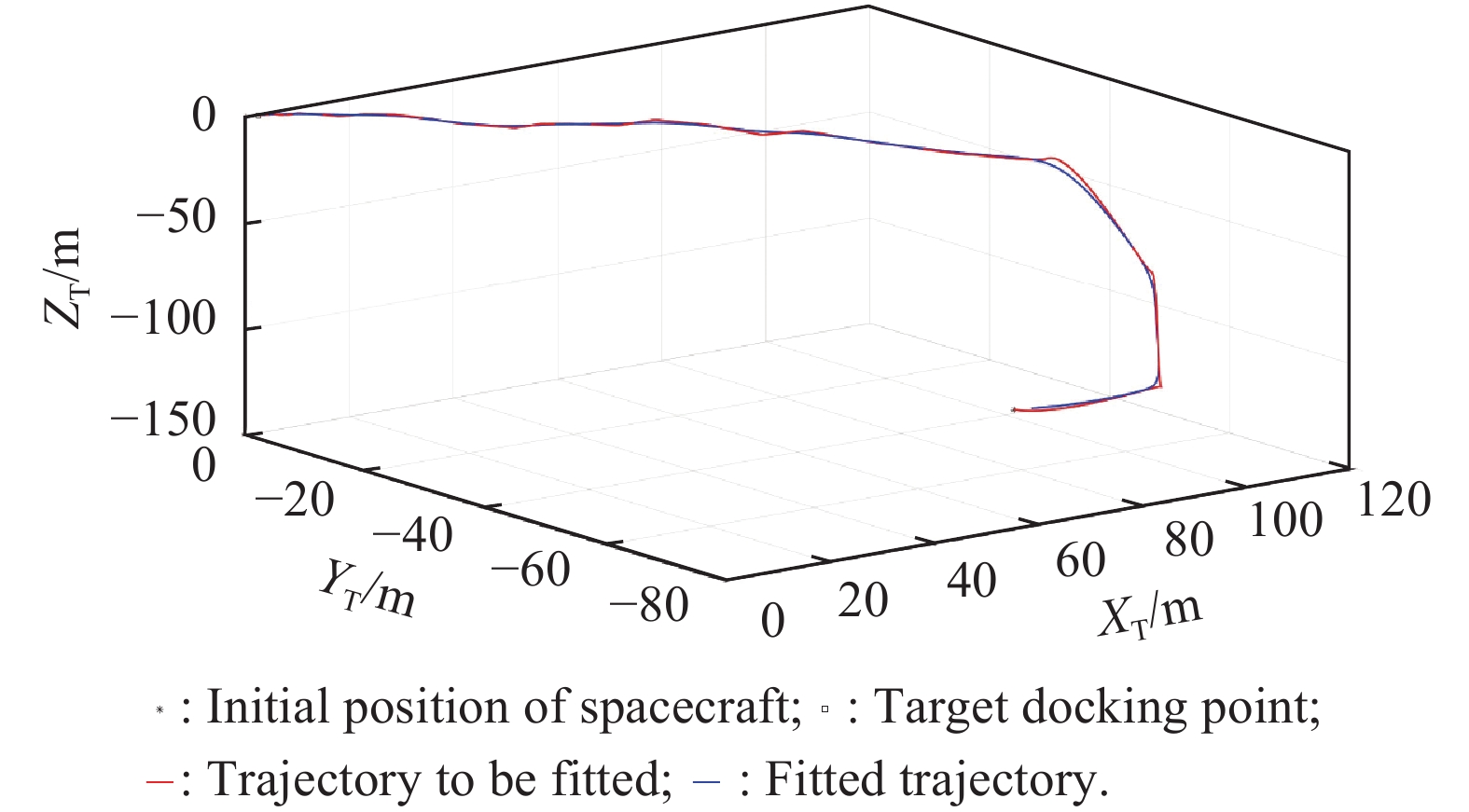

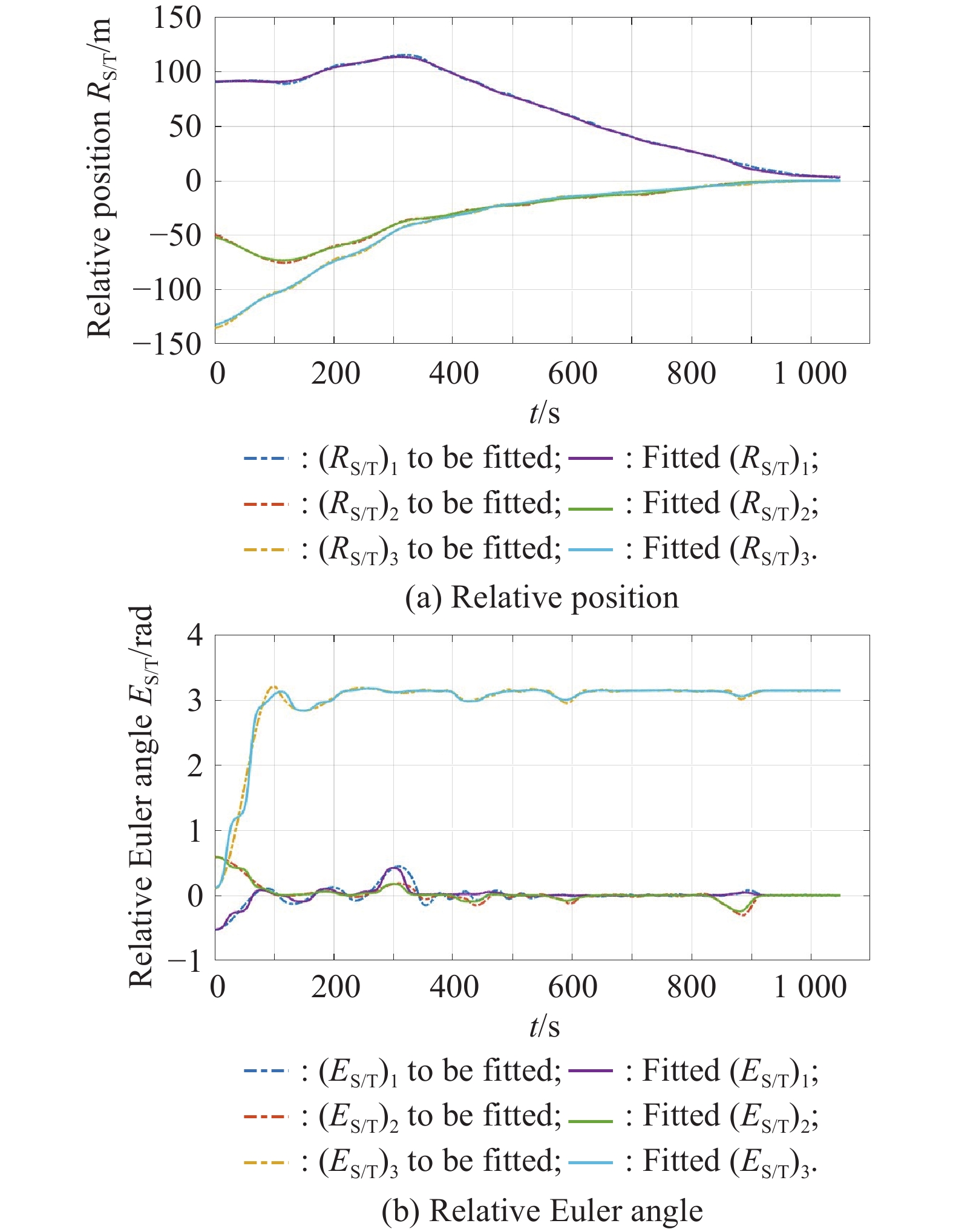
Fig 8
Curves of relative position and attitude before and after ?tting"
| 1 |
VERSTRAETE A W, ANDERSON D, ST LOUIS N M, et al Geosynchronous earth orbit robotic servicer mission design. Journal of Spacecraft and Rockets, 2018, 55 (6): 1444- 1452.
doi: 10.2514/1.A33945 |
| 2 |
OPROMOLLA R, FASANO G, RUFINO G, et al A review of cooperative and uncooperative spacecraft pose determination techniques for close-proximity operations. Progress in Aerospace Sciences, 2017, 93, 53- 72.
doi: 10.1016/j.paerosci.2017.07.001 |
| 3 | CHAKRAVARTHY A, GHOSE D. Rendezvous cones to achieve docking with spinning objects in space. Proc. of the AIAA Scitech Forum, 2024: 0988. |
| 4 |
RICHARDS A, SCHOUWENAARS T, HOW J P, et al Spacecraft trajectory planning with avoidance constraints using mixed-integer linear programming. Journal of Guidance, Control, and Dynamics, 2002, 25 (4): 755- 764.
doi: 10.2514/2.4943 |
| 5 |
BREGER L, HOW J P Safe trajectories for autonomous rendezvous of spacecraft. Journal of Guidance, Control, and Dynamics, 2008, 31 (5): 1478- 1489.
doi: 10.2514/1.29590 |
| 6 |
GARRETT C R, CHITNIS R, HOLLADAY R, et al Integrated task and motion planning. Annual Review of Control, Robotics, and Autonomous Systems, 2021, 4, 265- 293.
doi: 10.1146/annurev-control-091420-084139 |
| 7 | LATOMBE J C. Robot motion planning. Berlin: Springer Science and Business Media, 2012. |
| 8 |
ZHANG H Z, YE D, XIAO Y, et al Adaptive control on SE(3) for spacecraft pose tracking with harmonic disturbance and input saturation. IEEE Trans. on Aerospace and Electronic Systems, 2022, 58 (5): 4578- 4594.
doi: 10.1109/TAES.2022.3165524 |
| 9 | JIANG S L, ZHAO F Y, CHEN Y J, et al. Spacecraft attitude maneuver planning based on deep reinforcement learning under complex constraints. Proc. of the 9th International Conference on Control Science and Systems Engineering, 2023: 61−67. |
| 10 |
XIE C Q, ZHANG G, ZHANG Y C Simple shaping approximation for low-thrust trajectories between coplanar elliptical orbits. Journal of Guidance, Control, and Dynamics, 2015, 38 (12): 2448- 2455.
doi: 10.2514/1.G001209 |
| 11 |
WANG Z, XU R Rapid search method for a spacecraft attitude maneuver path with multiple constraints. Aerospace Science and Technology, 2021, 117, 106904.
doi: 10.1016/j.ast.2021.106904 |
| 12 |
SHAO X D, HU Q L Immersion and invariance adaptive pose control for spacecraft proximity operations under kinematic and dynamic constraints. IEEE Trans. on Aerospace and Electronic Systems, 2021, 57 (4): 2183- 2200.
doi: 10.1109/TAES.2021.3053134 |
| 13 |
ZHANG R S, CAO S, ZHAO K, et al A hybrid-driven optimization framework for fixed-wing UAV maneuvering flight planning. Electronics, 2021, 10 (19): 2330.
doi: 10.3390/electronics10192330 |
| 25 |
QURESHI A H, AYAZ Y Intelligent bidirectional rapidly-exploring random trees for optimal motion planning in complex cluttered environments. Robotics and Autonomous Systems, 2015, 68, 1- 11.
doi: 10.1016/j.robot.2015.02.007 |
| 26 |
RYBUS T, PROKOPCZUK J, WOJTUNIK M, et al Application of bidirectional rapidly exploring random trees (BiRRT) algorithm for collision-free trajectory planning of free-floating space manipulator. Robotica, 2022, 40, 4326- 4357.
doi: 10.1017/S0263574722000935 |
| 27 | FAN H H, HUANG J H, HUANG X Z, et al. Bi-RRT*: an improved path planning algorithm for secure and trustworthy mobile robots systems. Heliyon, 2024, 10(5): e26403. |
| 28 | NOREEN I, KHAN A, HABIB Z. Optimal path planning using RRT* based approaches: a survey and future directions. International Journal of Advanced Computer Science and Applications, 2016, 7(11): 97-107. |
| 29 | XIAO Y M, YANG Z B, ZHOU Y, et al. Run-time assured reinforcement learning for safe spacecraft rendezvous with obstacle avoidance. Proc. of the International Symposium on Dependable Software Engineering: Theories, Tools, and Applications, 2023: 298−313. |
| 30 |
IKEYA K, LIU K W, GIRARD A, et al Learning reference governor for constrained spacecraft rendezvous and proximity maneuvering. Journal of Spacecraft and Rockets, 2023, 60 (4): 1127- 1141.
doi: 10.2514/1.A35483 |
| 31 |
YANG Z B, XING L Q, GU Z H, et al Model-based reinforcement learning and neural-network-based policy compression for spacecraft rendezvous on resource-constrained embedded systems. IEEE Trans. on Industrial Informatics, 2022, 19 (1): 1107- 1116.
doi: 10.1109/tii.2022.3192085 |
| 14 |
ZHOU D, YU Z H, ZHANG Y Q, et al Translational and rotational motion planning for spacecraft close proximity using sampling-based methods. Proceedings of the Institution of Mechanical Engineers, Part G: Journal of Aerospace Engineering, 2019, 233 (10): 3680- 3699.
doi: 10.1177/0954410018803986 |
| 15 |
ZHANG Y Q, ZHU B L, CHENG M, et al Trajectory optimization for spacecraft autonomous rendezvous and docking with compound state-triggered constraints. Aerospace Science and Technology, 2022, 127, 107733.
doi: 10.1016/j.ast.2022.107733 |
| 16 |
KARAMAN S, FRAZZOLI E Sampling-based algorithms for optimal motion planning. The International Journal of Robotics Research, 2011, 30 (7): 846- 894.
doi: 10.1177/0278364911406761 |
| 17 |
ELBANHAWI M, SIMIC M Sampling-based robot motion planning: a review. IEEE Access, 2014, 2, 56- 77.
doi: 10.1109/ACCESS.2014.2302442 |
| 18 |
HART P E, NILSSON N J, RAPHAEL B A formal basis for the heuristic determination of minimum cost paths. IEEE Trans. on Systems Science and Cybernetics, 1968, 4 (2): 100- 107.
doi: 10.1109/TSSC.1968.300136 |
| 19 | WEBB D J, VAN DEN BERG J. Kinodynamic RRT*: asymptotically optimal motion planning for robots with linear dynamics. Proc. of the IEEE International Conference on Robotics and Automation, 2013: 5054−5061. |
| 20 |
LOPEZ I, MCLNNES C R Autonomous rendezvous using artificial potential function guidance. Journal of Guidance, Control, and Dynamics, 1995, 18 (2): 237- 241.
doi: 10.2514/3.21375 |
| 21 | GAMMELL J D, SRINIVASA S S, BARFOOT T D. Batch informed trees (BIT*): sampling-based optimal planning via the heuristically guided search of implicit random geometric graphs. Proc. of the IEEE International Conference on Robotics and Automation, 2015: 3067−3074. |
| 22 |
QURESHI A H, MIAO Y, SIMEONOV A, et al Motion planning networks: bridging the gap between learning-based and classical motion planners. IEEE Trans. on Robotics, 2020, 37 (1): 48- 66.
doi: 10.1109/tro.2020.3006716 |
| 23 |
ESHTEHARDIAN S, KHODAYGAN S A continuous RRT*-based path planning method for non-holonomic mobile robots using B-spline curves. Journal of Ambient Intelligence and Humanized Computing, 2023, 14 (7): 8693- 8702.
doi: 10.1007/s12652-021-03625-8 |
| 24 | NOREEN I, KHAN A, HABIB Z A comparison of RRT, RRT* and RRT*-smart path planning algorithms. International Journal of Computer Science and Network Security, 2016, 16 (10): 20. |
| [1] | Dongming GE, Guanghui SUN, Yuanjie ZOU, Jixin SHI. Impedance control of multi-arm space robot for the capture of non-cooperative targets [J]. Journal of Systems Engineering and Electronics, 2020, 31(5): 1051-1061. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||