
Journal of Systems Engineering and Electronics ›› 2025, Vol. 36 ›› Issue (2): 523-536.doi: 10.23919/JSEE.2025.000034
• CONTROL THEORY AND APPLICATION • Previous Articles
Guhao SUN( ), Qingshuang ZENG(), Zhongze CAI()
), Qingshuang ZENG(), Zhongze CAI()
Received:2024-04-15
Accepted:2025-02-28
Online:2025-04-18
Published:2025-05-20
Contact:
Qingshuang ZENG
E-mail:hitsungh@126.com;zqshuang@hit.edu.cn;hitczz@163.com
About author:Supported by:Guhao SUN, Qingshuang ZENG, Zhongze CAI. Fixed-time distributed average consensus tracking for multiple Euler-Lagrange systems[J]. Journal of Systems Engineering and Electronics, 2025, 36(2): 523-536.
Add to citation manager EndNote|Reference Manager|ProCite|BibTeX|RefWorks

Fig 1
Communication topology of multi-agent system"
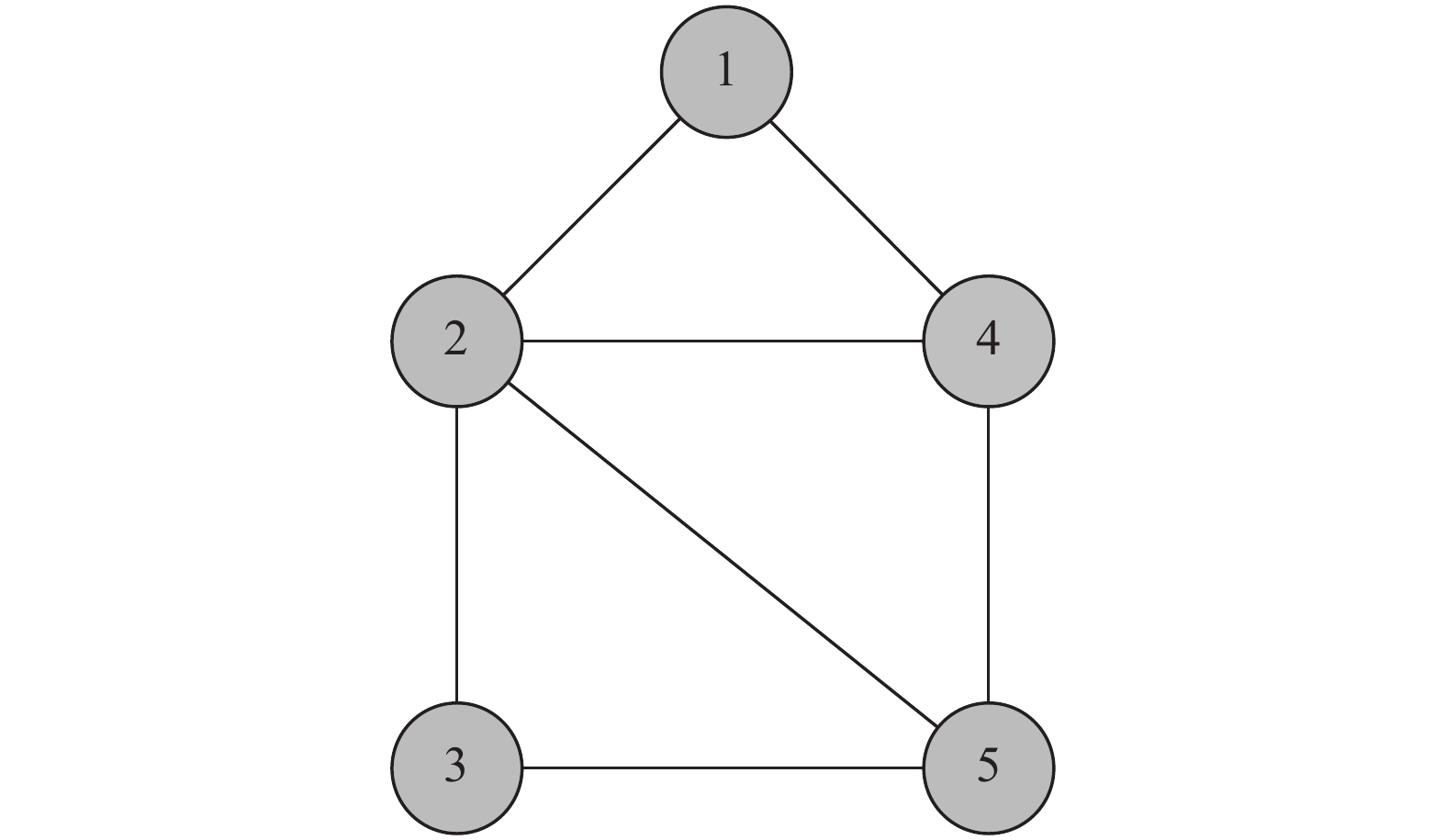

Fig 2
Two-degree of freedom robot manipulator"
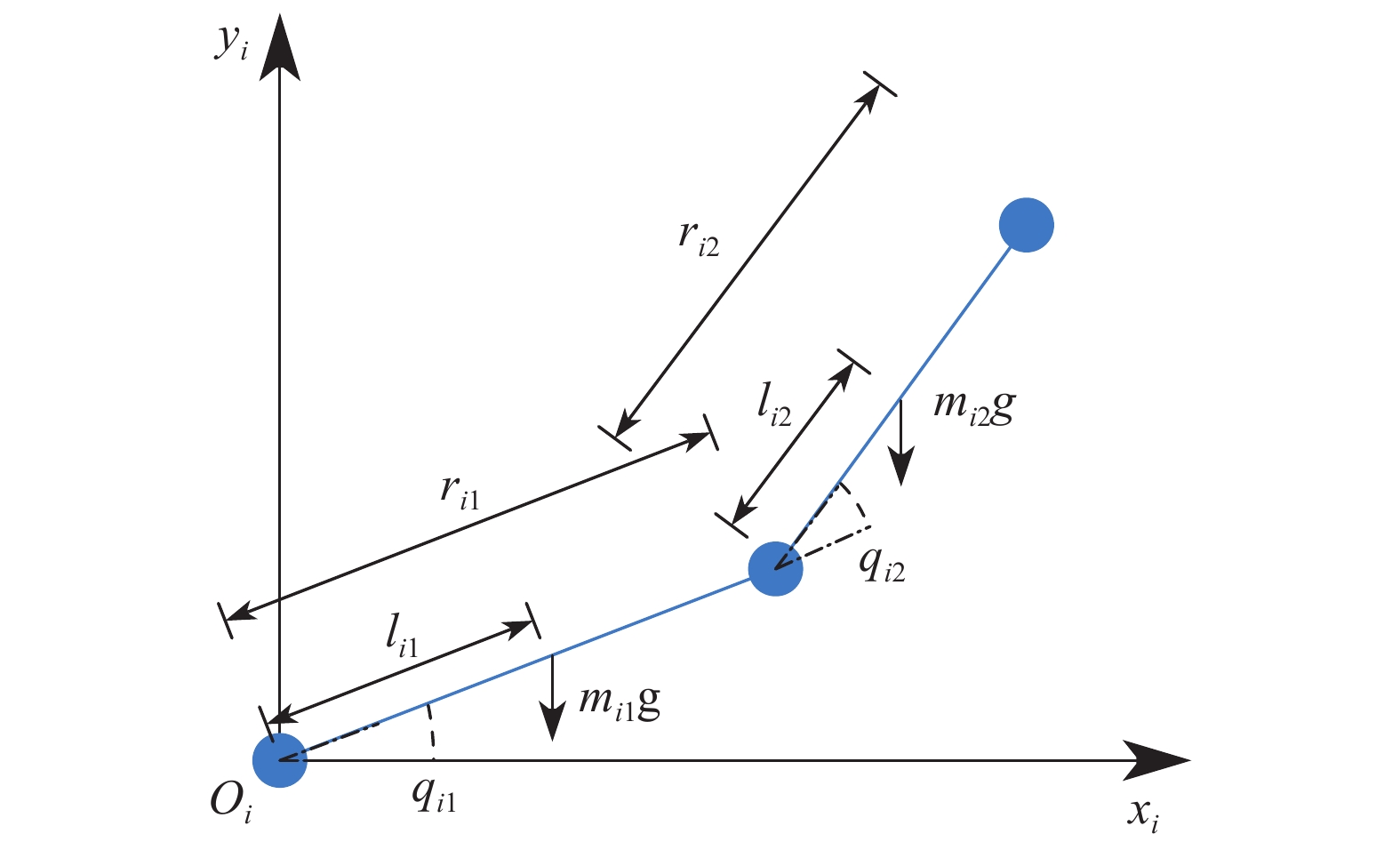
Fig 3
Estimation of average position reference signals for each agent by the proposed approach"
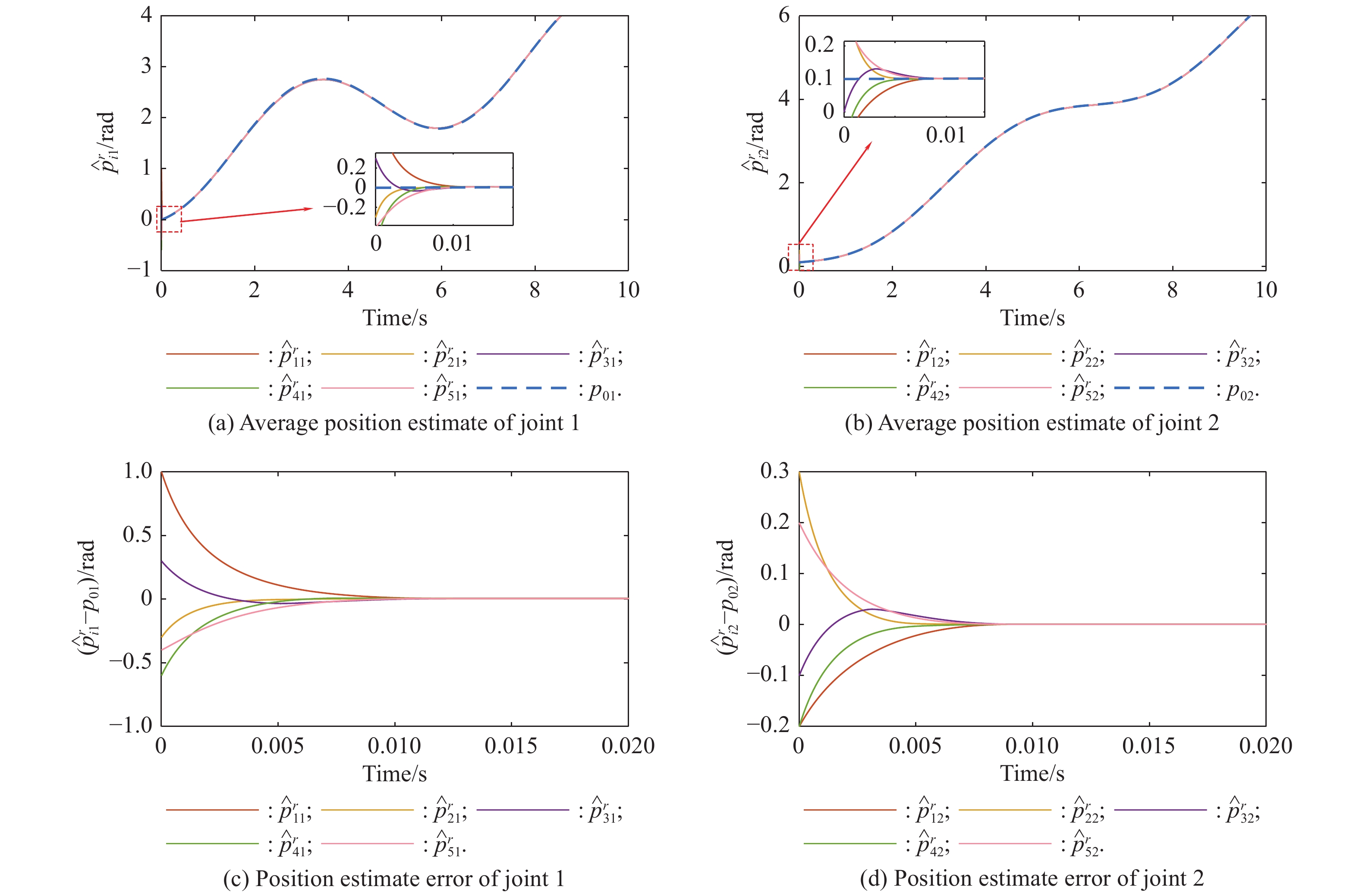
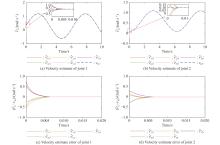
Fig 4
Estimation of average velocity reference signals for each agent by the proposed approach"
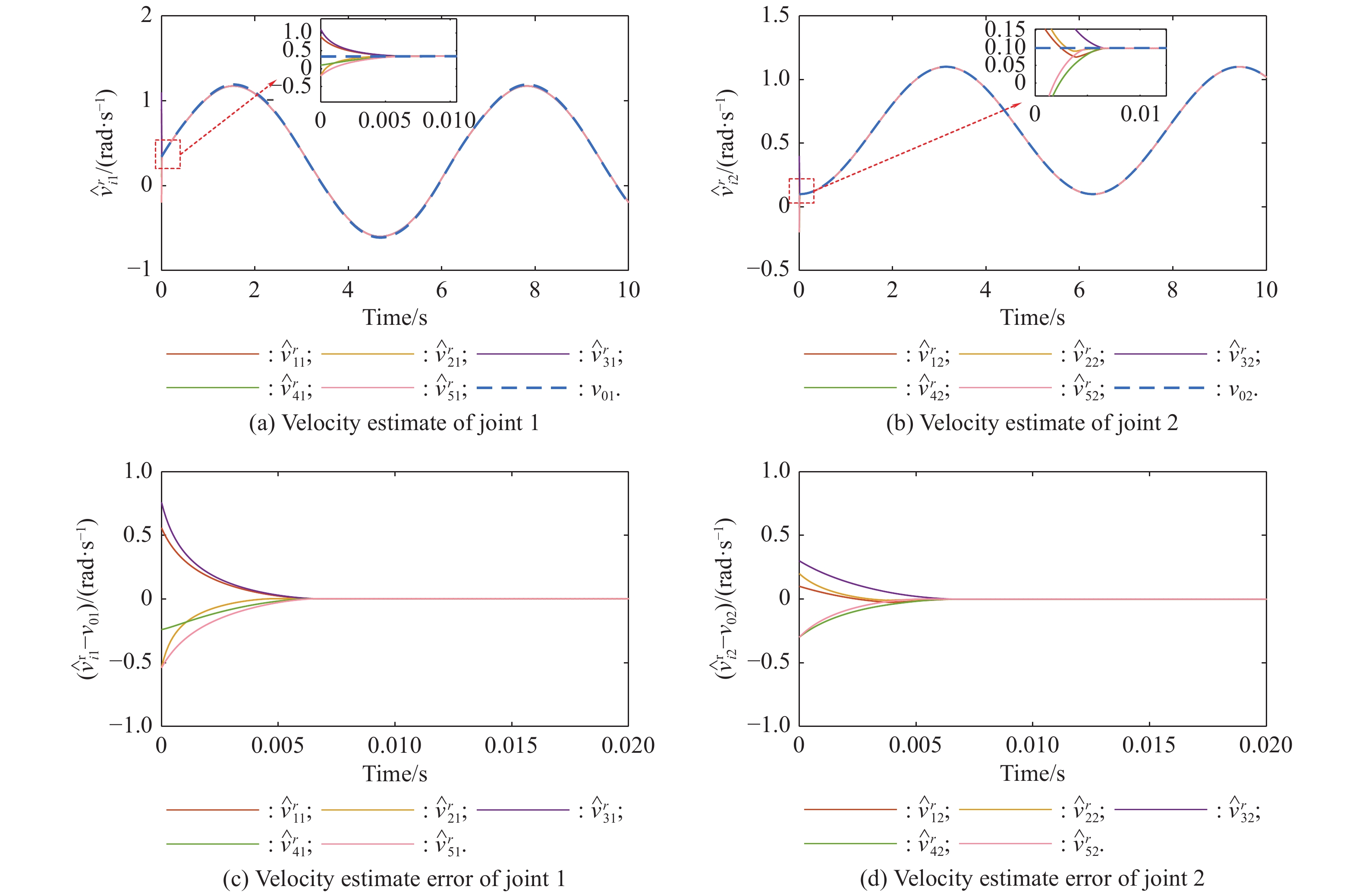

Fig 5
Estimate errors of average reference signals by estimator proposed in [10]"
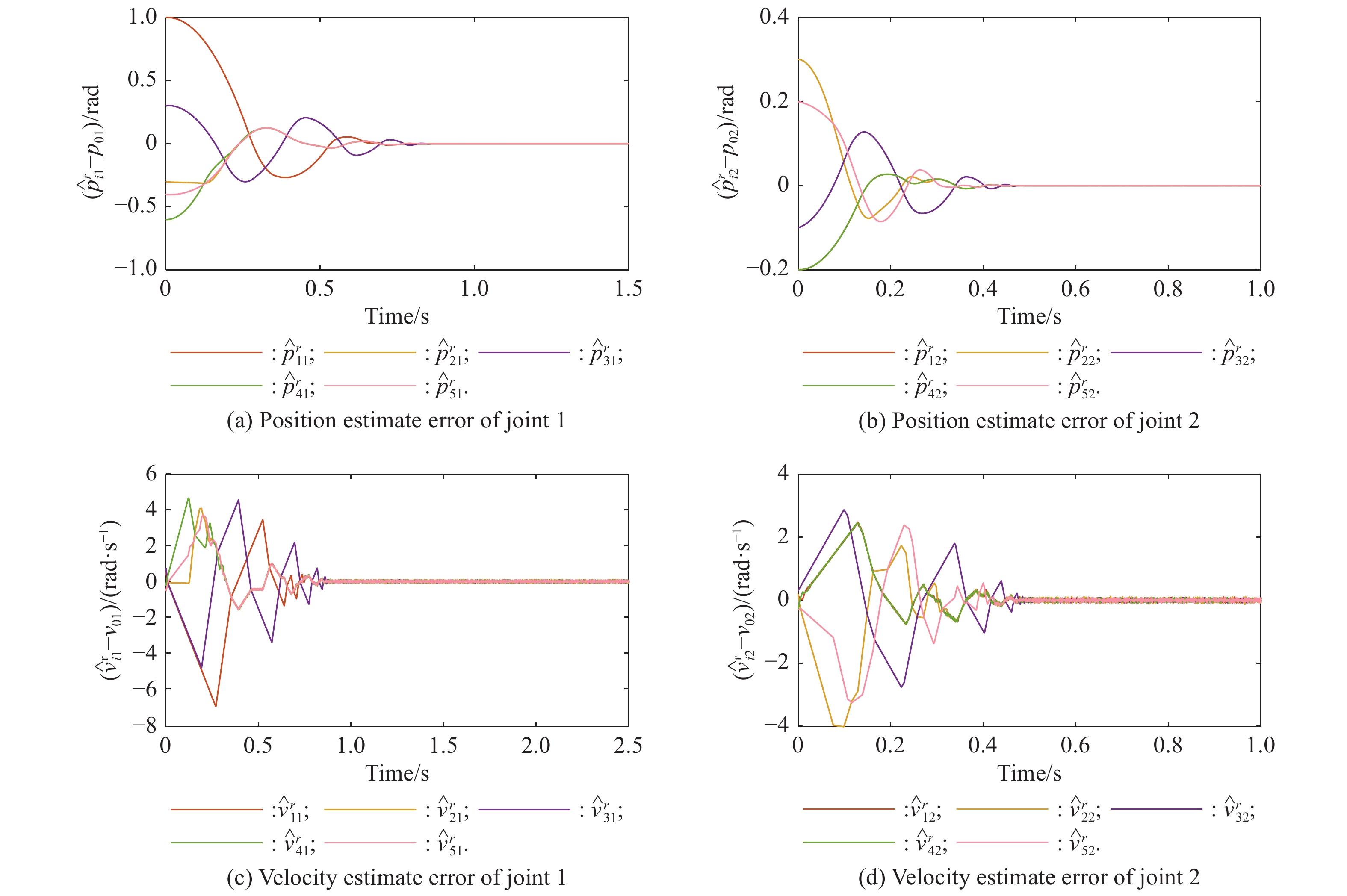
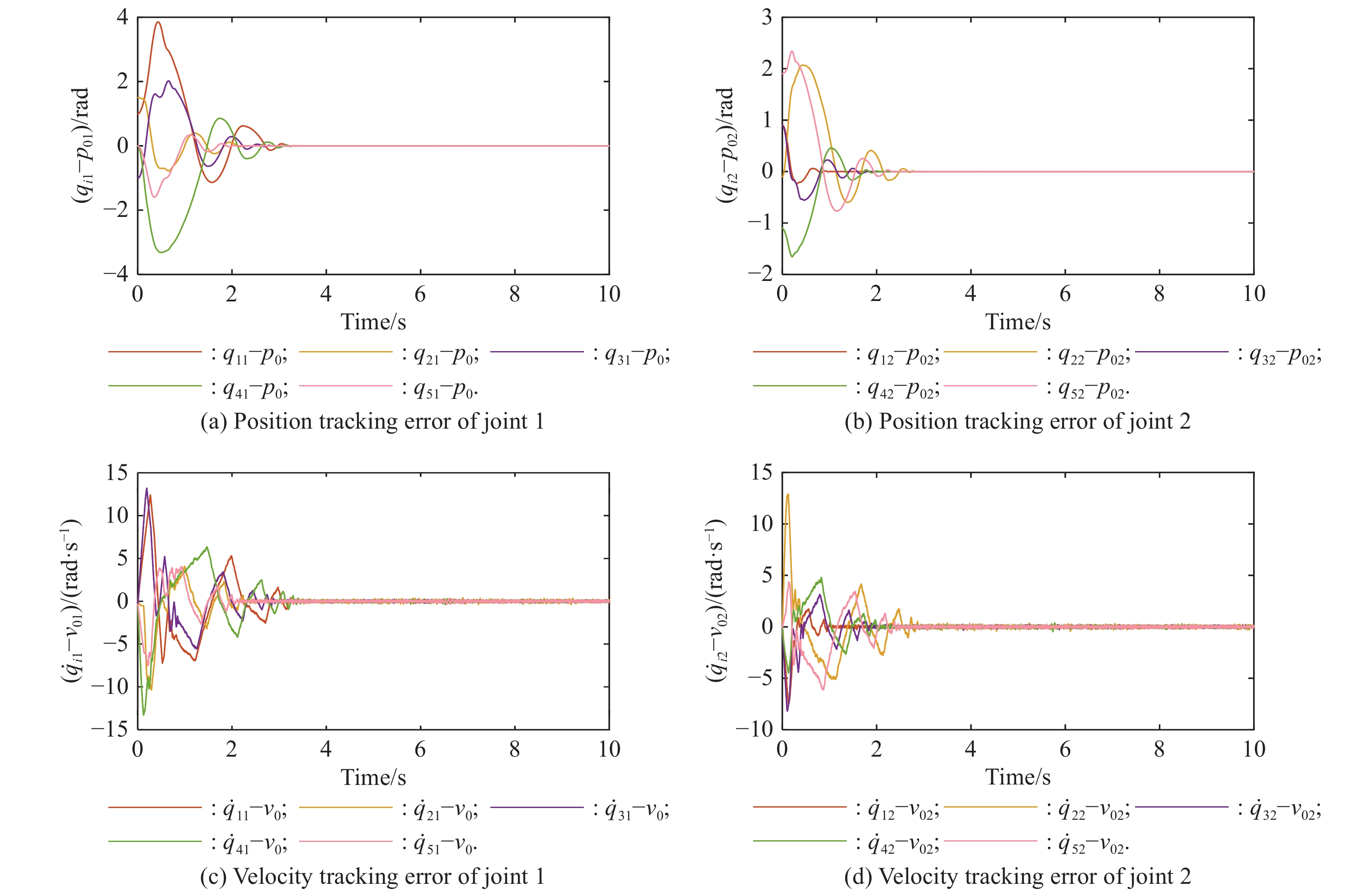
Fig 6
Average tracking trajectory of the reference signals for each agent by the proposed approach"
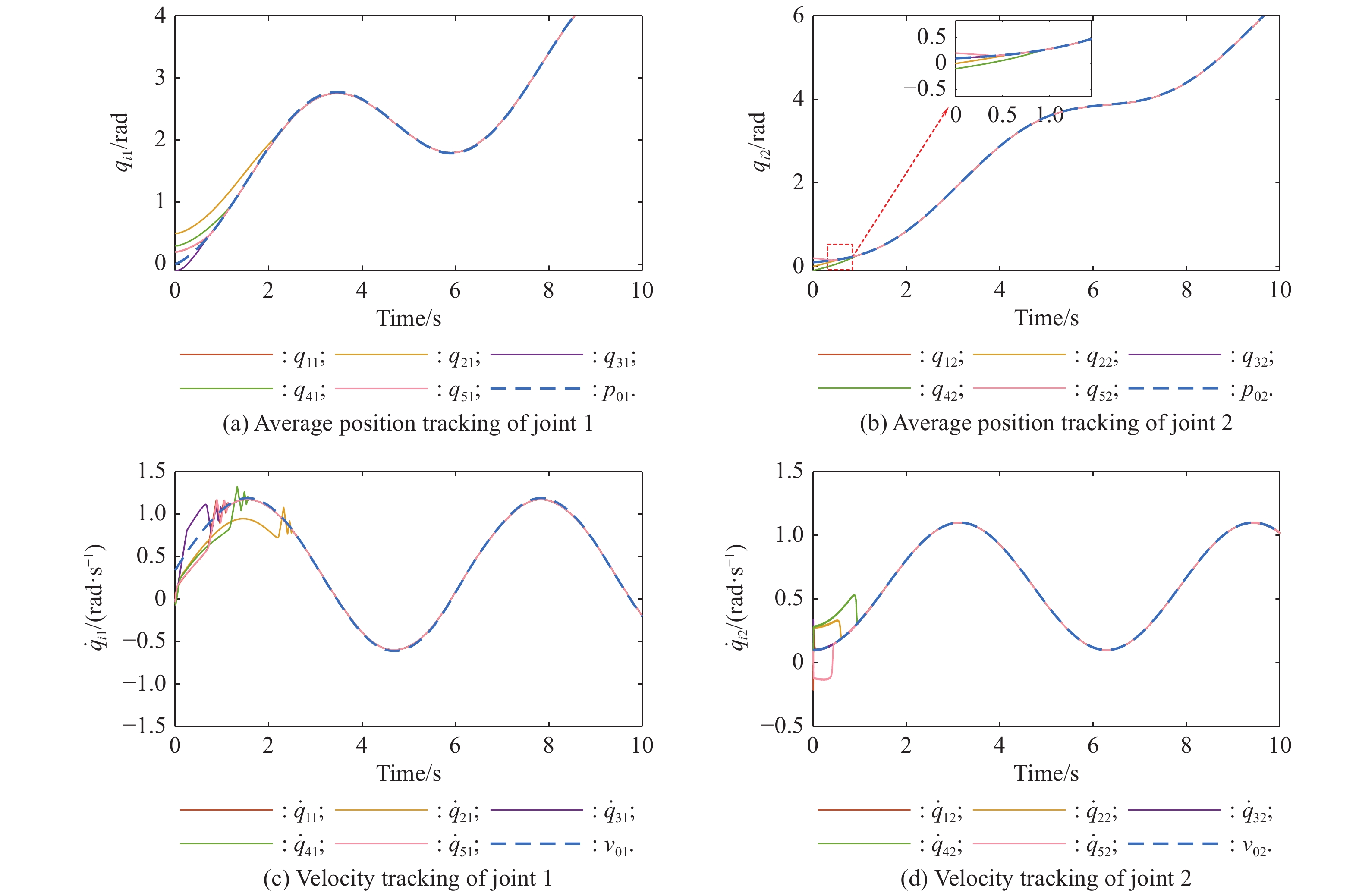
Fig 7
Average tracking trajectory by DAT algorithm proposed in [10]"
| 1 |
AMIRKHANI A, BARSHOOI A H Consensus in multi-agent systems: a review. Artificial Intelligence Review, 2022, 55 (5): 3897- 3935.
doi: 10.1007/s10462-021-10097-x |
| 2 |
MA W L, FU M Y, CUI P, et al Finite-time average consensus based approach for distributed convex optimization. Asian Journal of Control, 2020, 22 (1): 323- 333.
doi: 10.1002/asjc.1886 |
| 3 |
TALEBI S P, WERNER S Distributed Kalman filtering and control through embedded average consensus information fusion. IEEE Trans. on Automatic Control, 2019, 64 (10): 4396- 4403.
doi: 10.1109/TAC.2019.2897887 |
| 4 |
ZHANG K X, LI Z J, WANG Y Q, et al Privacy-preserving dynamic average consensus via state decomposition: case study on multi-robot formation control. Automatica, 2022, 139, 110182.
doi: 10.1016/j.automatica.2022.110182 |
| 5 |
LIU W H, DENG F Q, LIANG J R, et al Weighted average consensus problem in networks of agents with diverse time-delays. Journal of Systems Engineering and Electronics, 2014, 25 (6): 1056- 1064.
doi: 10.1109/JSEE.2014.00121 |
| 6 |
CHEN F, CAO Y C, REN W Distributed average tracking of multiple time-varying reference signals with bounded derivatives. IEEE Trans. on Automatic Control, 2012, 57 (12): 3169- 3174.
doi: 10.1109/TAC.2012.2199176 |
| 7 |
CHEN F, REN W, LAN W Y, et al Distributed average tracking for reference signals with bounded accelerations. IEEE Trans. on Automatic Control, 2015, 60 (3): 863- 869.
doi: 10.1109/TAC.2014.2337451 |
| 8 | GHAPANI S, RAHILI S, REN W Distributed average tracking of physical second-order agents with heterogeneous unknown nonlinear dynamics without constraint on input signals. IEEE Trans. on Automatic Control, 2018, 64 (3): 1178- 1184. |
| 9 |
GEORGE J, FREEMAN R A Robust dynamic average consensus algorithms. IEEE Trans. on Automatic Control, 2019, 64 (11): 4615- 4622.
doi: 10.1109/TAC.2019.2901819 |
| 10 |
HONG H F, WEN G H, YU X H, et al Robust distributed average tracking for disturbed second-order multiagent systems. IEEE Trans. on Systems, Man, and Cybernetics: Systems, 2022, 52 (5): 3187- 3199.
doi: 10.1109/TSMC.2021.3064152 |
| 11 | GHAPANI S, REN W, CHEN F. Distributed average tracking for double-integrator agents without using velocity measurements. Proc. of the American Control Conference, 2015: 1445−1450. |
| 12 |
ZHAO Y, LIU Y, WEN G, et al Distributed average tracking for Lipschitz-type of nonlinear dynamical systems. IEEE Trans. on Cybernetics, 2019, 49 (12): 4140- 4152.
doi: 10.1109/TCYB.2018.2859352 |
| 13 |
ZHAO Y, LIU Y F, WEN G H, et al Finite-time distributed average tracking for second-order nonlinear systems. IEEE Trans. on Neural Networks and Learning Systems, 2019, 30 (6): 1780- 1789.
doi: 10.1109/TNNLS.2018.2873676 |
| 14 |
CHEN F, FENG G, LIU L, et al Distributed average tracking of networked Euler-Lagrange systems. IEEE Trans. on Automatic Control, 2015, 60 (2): 547- 552.
doi: 10.1109/TAC.2014.2343111 |
| 15 |
ZHAO H, ZHAO N, ZONG G D, et al Sliding-mode surface-based approximate optimal control for nonlinear multiplayer Stackelberg-Nash games via adaptive dynamic programming. Communications in Nonlinear Science and Numerical Simulation, 2024, 132, 107928.
doi: 10.1016/j.cnsns.2024.107928 |
| 16 |
LIU S H, WANG H Q, LIU Y F, et al Sliding-mode surface-based adaptive optimal nonzero-sum games for saturated nonlinear multi-player systems with identifier-critic networks. Neurocomputing, 2024, 584, 127575.
doi: 10.1016/j.neucom.2024.127575 |
| 17 | LIU S L, NIU B, KARIMI H R, et al. Self-triggered fixed-time bipartite fault-tolerant consensus for nonlinear multiagent systems with function constraints on states. Chaos, Solitons & Fractals, 2024, 178: 114367. |
| 18 | OLFATI-SABER R, MURRAY R M. Consensus problems in networks of agents with switching topology and time-delays. IEEE Trans. on Automatic Control, 2004, 49(9): 1520−1533. |
| 19 |
KIM Y, MESBAHI M On maximizing the second smallest eigenvalue of a state-dependent graph Laplacian. IEEE Trans. on Automatic Control, 2006, 51 (1): 116- 120.
doi: 10.1109/TAC.2005.861710 |
| 20 | LIU C L, SHAN L, ZHANG Y, et al Hierarchical average-tracking algorithm for multiagent systems with unmatched constant references signals. IEEE Trans. on Circuits and Systems II: Express Briefs, 2020, 67 (11): 2642- 2646. |
| 21 |
LIU C L, LI H, SHAN L Stationary average-tracking problem of unmatched constant reference signals based on delayed-state feedback. International Journal of Systems Science, 2021, 52 (13): 2725- 2734.
doi: 10.1080/00207721.2021.1898694 |
| 22 |
WU Y Z, LIU L Finite-time distributed average tracking for a class of nonlinear multi-agent systems with external disturbances. IEEE Trans. on Systems, Man, and Cybernetics: Systems, 2023, 53 (8): 5106- 5115.
doi: 10.1109/TSMC.2023.3261347 |
| 23 | WANG L, XI J X, YU Z Y, et al Limited-budget finite-time average consensus design for multi-agent systems. IET Control Theory & Applications, 2020, 14 (15): 2197- 2204. |
| 24 |
POLYAKOV A Nonlinear feedback design for fixed-time stabilization of linear control systems. IEEE Trans. on Automatic Control, 2012, 57 (8): 2106- 2110.
doi: 10.1109/TAC.2011.2179869 |
| 25 |
ZUO Z Y Nonsingular fixed-time consensus tracking for second-order multi-agent networks. Automatica, 2015, 54, 305- 309.
doi: 10.1016/j.automatica.2015.01.021 |
| 26 |
DU H B, WEN G H, WU D, et al Distributed fixed-time consensus for nonlinear heterogeneous multi-agent systems. Automatica, 2020, 113, 108797.
doi: 10.1016/j.automatica.2019.108797 |
| 27 | LIU J, RAN G T, WU Y B, et al Dynamic event-triggered practical fixed-time consensus for nonlinear multiagent systems. IEEE Trans. on Circuits and Systems II: Express Briefs, 2021, 69 (4): 2156- 2160. |
| 28 |
XU Y, YAO Z Z, LU R Q, et al A novel fixed-time protocol for first-order consensus tracking with disturbance rejection. IEEE Trans. on Automatic Control, 2022, 67 (11): 6180- 6186.
doi: 10.1109/TAC.2021.3131549 |
| 29 |
DUAN J, DUAN G C, CHENG S, et al Fixed-time time-varying output formation-containment control of heterogeneous general multi-agent systems. ISA Transactions, 2023, 137, 210- 221.
doi: 10.1016/j.isatra.2023.01.008 |
| 30 |
LI Y L, LIU C L, ZHANG Y, et al Distributed fixed-time average-tracking for multi-agent systems with mismatched and matched disturbances. Transactions of the Institute of Measurement and Control, 2022, 44 (12): 2323- 2335.
doi: 10.1177/01423312221083785 |
| 31 |
LI Y L, LIU C L, ZHANG Y, et al Fixed-time anti-disturbance average-tracking for multi-agent systems without velocity measurements. Journal of Systems Science and Complexity, 2024, 37, 985- 1002.
doi: 10.1007/s11424-023-2461-9 |
| 32 |
LI Y L, LIU C L, ZHANG Y, et al Fixed-time anti-disturbance average-tracking for heterogeneous linear multiagent systems. IEEE Trans. on Systems, Man, and Cybernetics: Systems, 2024, 54 (2): 1104- 1112.
doi: 10.1109/TSMC.2023.3323508 |
| 33 | TIAN Y, DU C K, LU P L, et al Nonsingular fixed-time attitude coordinated tracking control for multiple rigid spacecraft. ISA Transactions, 2022, 129, 243- 256. |
| 34 |
REN W, BEARD R W Consensus seeking in multiagent systems under dynamically changing interaction topologies. IEEE Trans. on Automatic Control, 2005, 50 (5): 655- 661.
doi: 10.1109/TAC.2005.846556 |
| 35 |
TRUJILLO M A, ALDANA-LÓPEZ R, GÓMEZ-GUTIÉRREZ D, et al Autonomous and non-autonomous fixed-time leader-follower consensus for second-order multi-agent systems. Nonlinear Dynamics, 2020, 102 (4): 2669- 2686.
doi: 10.1007/s11071-020-06075-7 |
| 36 |
POLYAKOV A, EFIMOV D, PERRUQUETTI W Robust stabilization of MIMO systems in finite/fixed time. International Journal of Robust and Nonlinear Control, 2016, 26 (1): 69- 90.
doi: 10.1002/rnc.3297 |
| 37 |
PARSEGOV S, POLYAKOV A, SHCHERBAKOV P Fixed-time consensus algorithm for multi-agent systems with integrator dynamics. IFAC Proceedings Volumes, 2013, 46 (27): 110- 115.
doi: 10.3182/20130925-2-DE-4044.00055 |
| 38 | HARDY G H, LITTLEWOOD J E, PÓLYA G. Inequalities. Cambridge: Cambridge University Press, 1988. |
| 39 |
SHAO K, TANG R C, XU F, et al Adaptive sliding mode control for uncertain Euler-Lagrange systems with input saturation. Journal of the Franklin Institute, 2021, 358 (16): 8356- 8376.
doi: 10.1016/j.jfranklin.2021.08.027 |
| 40 |
SEN A, SAHOO S R, KOTHARI M Distributed average tracking with incomplete measurement under a weight-unbalanced digraph. IEEE Trans. on Automatic Control, 2022, 67 (11): 6025- 6037.
doi: 10.1109/TAC.2022.3179219 |
| 41 |
MOULAY E, LÉCHAPPÉ V, BERNUAU E, et al Robust fixed-time stability: application to sliding-mode control. IEEE Trans. on Automatic Control, 2022, 67 (2): 1061- 1066.
doi: 10.1109/TAC.2021.3069667 |
| 42 | SPONG M W, HUTCHINSON S, VIDYASAGAR M. Robot modeling and control. New Jersey: Wiley, 2020. |
| [1] | Muhammad WASIM, Ahsan ALI, Mohammad Ahmad CHOUDHRY, Inam Ul Hasan SHAIKH, Faisal SALEEM. Robust design of sliding mode control for airship trajectory tracking with uncertainty and disturbance estimation [J]. Journal of Systems Engineering and Electronics, 2024, 35(1): 242-258. |
| [2] | Dakai LIU, Sven ESCHE. Revised barrier function-based adaptive finite- and fixed-time convergence super-twisting control [J]. Journal of Systems Engineering and Electronics, 2023, 34(3): 775-782. |
| [3] | Pu YANG, Xukai HU, Zixin WANG, Zhiqing ZHANG. Sliding mode fault tolerant consensus control for multi-agent systems based on super-twisting observer [J]. Journal of Systems Engineering and Electronics, 2022, 33(6): 1309-1319. |
| [4] | Narin JEERANANTASIN, Suksun NUNGAM. Sliding mode control of three-phase AC/DC converters using exponential rate reaching law [J]. Journal of Systems Engineering and Electronics, 2022, 33(1): 210-221. |
| [5] | Zongxing LI, Rui ZHANG. Time-varying sliding mode control of missile based on suboptimal method [J]. Journal of Systems Engineering and Electronics, 2021, 32(3): 700-710. |
| [6] | Vedadi Moghaddam TAHMINEH, Yadavar Nikravesh SEYYED KAMALEDDIN, Azam Khosravi MOHAMMAD. Constrained sliding mode control of nonlinear fractional order input affine systems [J]. Journal of Systems Engineering and Electronics, 2019, 30(5): 995-1006. |
| [7] | Haibo LIU, Heping WANG, Junlei SUN. Attitude control for QTR using exponential nonsingular terminal sliding mode control [J]. Journal of Systems Engineering and Electronics, 2019, 30(1): 191-200. |
| [8] | Yueneng YANG, Ye YAN. Backstepping sliding mode control for uncertain strictfeedback nonlinear systems using neural-network-based adaptive gain scheduling [J]. Journal of Systems Engineering and Electronics, 2018, 29(3): 580-586. |
| [9] | Yuhang YUN, Shengjing TANG, Jie GUO, Wei SHANG. Robust controller design for compound control missile with fixed bounded convergence time [J]. Journal of Systems Engineering and Electronics, 2018, 29(1): 116-133. |
| [10] | Xiaolei Li, Xiaoyuan Luo, Shaobao Li, Jianjin Li, and Xinping Guan. Consensus of second-order nonlinear multi-agent systems via sliding mode observer and controller [J]. Systems Engineering and Electronics, 2017, 28(4): 756-. |
| [11] | Ri Liu, Xiuxia Sun, Wenhan Dong, and Dong Wang. Finite-time adaptive sliding mode control for heavyweight airdrop operations [J]. Systems Engineering and Electronics, 2017, 28(2): 338-346. |
| [12] | Zhanshan Zhao, Hongru Gu, Jing Zhang, and Gang Ding. Terminal sliding mode control based on super-twisting algorithm [J]. Systems Engineering and Electronics, 2017, 28(1): 145-. |
| [13] | Xuejiao Sun, Rui Zhou, and Delong Hou. Output-feedback based partial integrated missile guidance and control law design [J]. Journal of Systems Engineering and Electronics, 2016, 27(6): 1238-1248. |
| [14] | Wei Shang, Shengjing Tang, Jie Guo, Yueyue Ma, and Yuhang Yun. Robust sliding mode control with ESO for dual-control missile [J]. Journal of Systems Engineering and Electronics, 2016, 27(5): 1073-1082. |
| [15] | Litong Ren, Shousheng Xie, Yu Zhang, Jingbo Peng, and Ledi Zhang. Chattering analysis for discrete sliding mode control of distributed control systems [J]. Journal of Systems Engineering and Electronics, 2016, 27(5): 1096-1107. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||