
Journal of Systems Engineering and Electronics ›› 2026, Vol. 37 ›› Issue (1): 272-286.doi: 10.23919/JSEE.2026.000010
• SYSTEMS ENGINEERING • Previous Articles Next Articles
Xiaoduo LI1,2( ), He LUO1,2,3(), Guoqiang WANG1,2,3,*(), Youlong YIN4()
), He LUO1,2,3(), Guoqiang WANG1,2,3,*(), Youlong YIN4()
Received:2023-09-05
Online:2026-02-18
Published:2026-03-09
Contact:
Guoqiang WANG
E-mail:lixiaoduo@mail.hfut.edu.cn;luohe@hfut.edu.cn;gqwang2017@hfut.edu.cn;yinyoulong@mail.hfut.edu.cn
About author:Supported by:Xiaoduo LI, He LUO, Guoqiang WANG, Youlong YIN. Improved simulated annealing algorithm for UAV path planning with uncertain flight time[J]. Journal of Systems Engineering and Electronics, 2026, 37(1): 272-286.
Add to citation manager EndNote|Reference Manager|ProCite|BibTeX|RefWorks
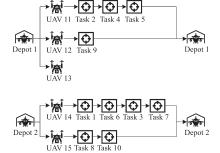
Fig 1
Representation of a solution"
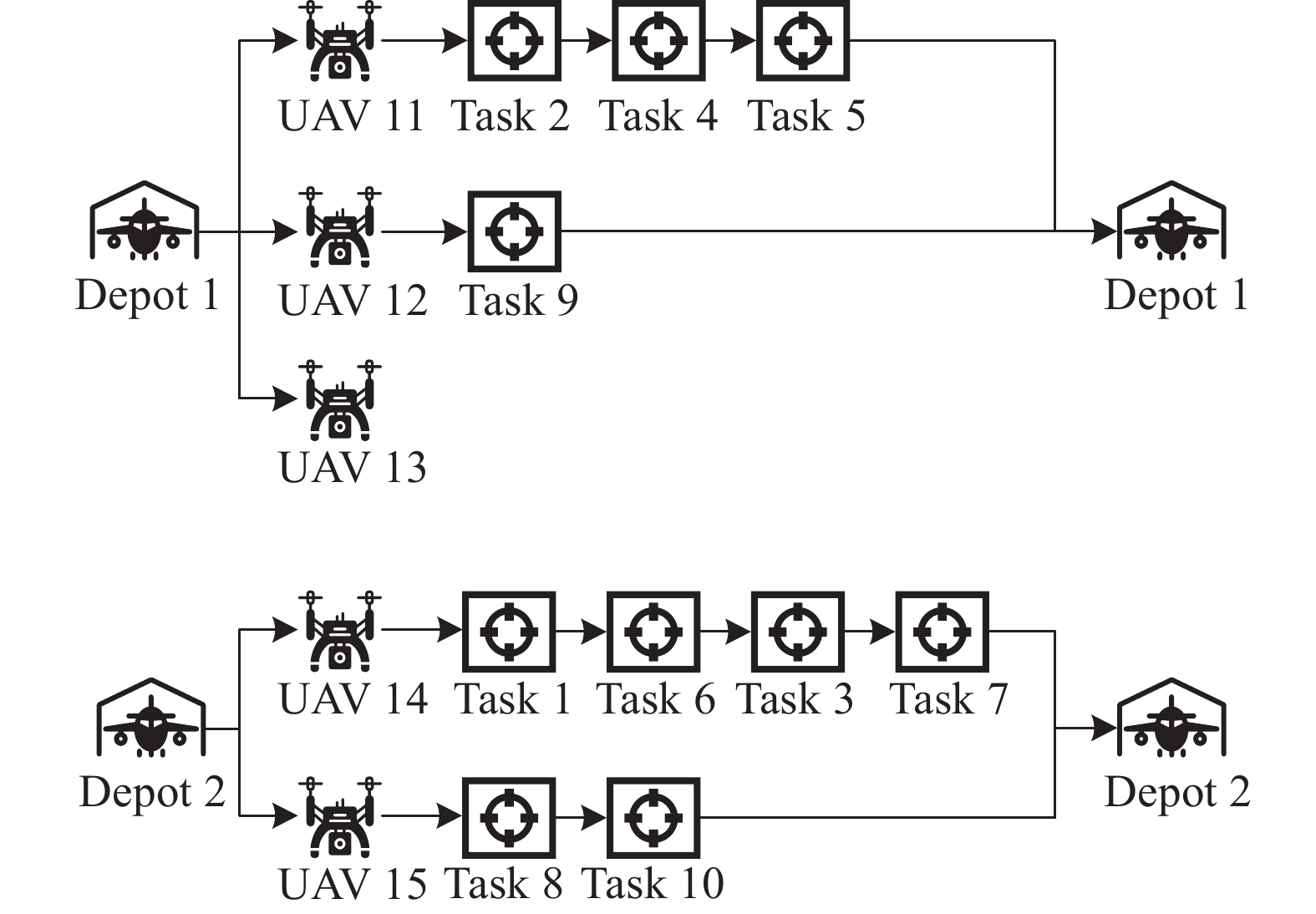
Table 1
Parameters of the SA-RFC"
| Parameter | Value |
| T0 | 15 |
| nT | 100 |
| λ | 0.97 |
| N−nimpr | 20 |
Table 2
Experimental results obtained by ROME, RC-CPLEX, and SA-RFC under different levels of uncertainty (R-x-y-1)"
| Instance | ||||||||||||||
| ROME | RC-CPLEX | SA-RFC | Gap | ROME | RC-CPLEX | SA-RFC | Gap | ROME | RC-CPLEX | SA-RFC | Gap | |||
| R-2-15-1 | 0.00 | 0.00 | 0.00 | |||||||||||
| R-2-20-1 | 0.00 | 0.07 | 0.39 | |||||||||||
| R-2-25-1 | 0.00 | 0.66 | − | 1.63 | ||||||||||
| R-2-30-1 | 0.00 | − | 1.21 | − | − | − | ||||||||
| R-2-35-1 | − | − | − | − | − | − | − | − | − | |||||
| R-2-40-1 | − | − | − | − | − | − | − | − | − | |||||
| R-2-50-1 | − | − | − | − | − | − | − | − | − | |||||
| R-3-15-1 | 0.00 | 0.00 | 0.00 | |||||||||||
| R-3-20-1 | 0.08 | 0.31 | 2.87 | |||||||||||
| R-3-25-1 | 0.35 | − | 1.96 | − | − | − | ||||||||
| R-3-30-1 | − | − | − | − | − | − | − | − | − | |||||
| R-3-35-1 | − | − | − | − | − | − | − | − | − | |||||
| R-3-40-1 | − | − | − | − | − | − | − | − | − | |||||
| R-3-50-1 | − | − | − | − | − | − | − | − | − | |||||
| R-4-15-1 | 0.00 | 0.00 | 0.00 | |||||||||||
| R-4-20-1 | 0.07 | 0.88 | 3.02 | |||||||||||
| R-4-25-1 | − | 0.56 | − | 2.27 | − | − | − | |||||||
| R-4-30-1 | − | − | − | − | − | − | − | − | − | |||||
| R-4-35-1 | − | − | − | − | − | − | − | − | − | |||||
| R-4-40-1 | − | − | − | − | − | − | − | − | − | |||||
| R-4-50-1 | − | − | 105.424 | − | − | − | − | − | − | − | ||||
Table 3
Computation time of ROME, RC-CPLEX, and SA-RFC under different levels of uncertainty (R-x-y-1) s"
| Instance | ||||||||||||||
| ROME | RC-CPLEX | SA-RFC | Gap | ROME | RC-CPLEX | SA-RFC | Gap | ROME | RC-CPLEX | SA-RFC | Gap | |||
| R-2-15-1 | 316.85 | 512.85 | 12.30 | 96.11 | 12.69 | 98.74 | 13.16 | 99.41 | ||||||
| R-2-20-1 | 15.49 | 98.46 | 14.84 | 99.39 | 15.87 | 99.45 | ||||||||
| R-2-25-1 | 18.72 | 99.27 | 18.99 | 99.36 | − | 19.83 | 99.44 | |||||||
| R-2-30-1 | 19.21 | 99.43 | − | 18.97 | 99.47 | − | − | 20.42 | − | |||||
| R-2-35-1 | − | − | 19.64 | − | − | − | 19.30 | − | − | − | 21.45 | − | ||
| R-2-40-1 | − | − | 20.37 | − | − | − | 21.03 | − | − | − | 23.78 | − | ||
| R-2-50-1 | − | − | 22.94 | − | − | − | 23.98 | − | − | − | 25.83 | − | ||
| R-3-15-1 | 680.19 | 985.05 | 12.89 | 98.10 | 12.99 | 99.07 | 14.32 | 99.46 | ||||||
| R-3-20-1 | 16.94 | 99.29 | 15.21 | 99.47 | 16.35 | 99.48 | ||||||||
| R-3-25-1 | 19.73 | 99.41 | − | 18.72 | 99.43 | − | − | 22.98 | − | |||||
| R-3-30-1 | − | − | 20.42 | − | − | − | 20.20 | − | − | − | 23.28 | − | ||
| R-3-35-1 | − | − | 20.60 | − | − | − | 21.99 | − | − | − | 25.14 | − | ||
| R-3-40-1 | − | − | 21.12 | − | − | − | 22.23 | − | − | − | 25.73 | − | ||
| R-3-50-1 | − | − | 23.64 | − | − | − | 25.57 | − | − | − | 28.36 | − | ||
| R-4-15-1 | 873.77 | 12.43 | 98.57 | 13.97 | 99.12 | 15.34 | 99.47 | |||||||
| R-4-20-1 | 17.72 | 99.38 | 16.33 | 99.45 | 16.98 | 99.51 | ||||||||
| R-4-25-1 | − | 20.33 | 99.41 | − | 18.93 | 99.46 | − | − | 23.54 | − | ||||
| R-4-30-1 | − | − | 20.86 | − | − | − | 21.94 | − | − | − | 25.67 | − | ||
| R-4-35-1 | − | − | 21.70 | − | − | − | 22.42 | − | − | − | 27.55 | − | ||
| R-4-40-1 | − | − | 22.42 | − | − | − | 24.96 | − | − | − | 28.19 | − | ||
| R-4-50-1 | − | − | 24.81 | − | − | − | 26.80 | − | − | − | 30.49 | − | ||
Table 4
Experimental results of the robust model under C, R and RC"
| Location distribution | Instance | ε=0.0 | ε=0.2 | ε=0.4 | ε=0.6 | |||||||||||
| PoR/% | Risk/% | K | PoR/% | Risk/% | K | PoR/% | Risk/% | K | PoR/% | Risk/% | K | |||||
| C | C-2-50-1 | − | 57.24 | 3 | 9.23 | 3.83 | 4 | 12.91 | 0 | 5.5 | 13.24 | 0 | 7 | |||
| C-2-50-2 | − | 38.53 | 3 | 7.35 | 2.11 | 4.2 | 8.91 | 0 | 4 | 10.91 | 0 | 4.1 | ||||
| C-2-50-3 | − | 36.94 | 3 | 6.37 | 3.36 | 3.7 | 8.32 | 0 | 4 | 9.02 | 0 | 4 | ||||
| R | R-2-50-1 | − | 100 | 4 | 18.4 | 37.76 | 6 | 24.9 | 2.12 | 7 | 29.9 | 0 | 7.8 | |||
| R-2-50-2 | − | 100 | 4 | 11.86 | 11.07 | 6.2 | 11.49 | 0.5 | 6.4 | 23.06 | 0 | 7 | ||||
| R-2-50-3 | − | 100 | 4 | 4.7 | 21.84 | 4.9 | 13.13 | 0.37 | 5.6 | 16.1 | 0 | 6.4 | ||||
| RC | RC-2-50-1 | − | 99.99 | 5 | 12.34 | 33.8 | 6 | 16.37 | 1.1 | 6.9 | 18.74 | 0 | 8.5 | |||
| RC-2-50-2 | − | 100 | 4 | 8.79 | 10.47 | 4.8 | 9.26 | 0.48 | 5.1 | 10.25 | 0 | 5 | ||||
| RC-2-50-3 | − | 97.28 | 4 | 10.58 | 18.96 | 4.3 | 10.98 | 0.03 | 4.4 | 12.44 | 0 | 4.5 | ||||
Table 5
Experimental results of the robust model under two, three and four depots"
| Numbers of depots | Instance | ε=0.0 | ε=0.2 | ε=0.4 | ε=0.6 | |||||||||||
| PoR/% | Risk/% | K | PoR/% | Risk/% | K | PoR/% | Risk/% | K | PoR/% | Risk/% | K | |||||
| 2 | R-2-50-1 | — | 100 | 4 | 18.4 | 37.76 | 6 | 24.9 | 2.12 | 7 | 29.9 | 0 | 7.8 | |||
| R-2-50-2 | — | 100 | 4 | 11.86 | 11.07 | 6.2 | 11.49 | 0.5 | 6.4 | 23.06 | 0 | 7 | ||||
| R-2-50-3 | — | 100 | 4 | 4.7 | 21.84 | 4.9 | 13.13 | 0.37 | 5.6 | 16.1 | 0 | 6.4 | ||||
| 3 | R-3-50-1 | — | 97.83 | 5 | 6.4 | 10.39 | 5.7 | 9.39 | 0.14 | 6.4 | 18.58 | 0 | 7.1 | |||
| R-3-50-2 | — | 99.99 | 4 | 10.34 | 5.22 | 5.8 | 8.9 | 0.01 | 6.2 | 12.44 | 0 | 6.6 | ||||
| R-3-50-3 | — | 100 | 5 | 4.63 | 9.72 | 5.5 | 8.45 | 0 | 5.9 | 9.7 | 0 | 6 | ||||
| 4 | R-4-50-1 | — | 95.98 | 5 | 5.5 | 2.3 | 5.8 | 7.57 | 0.62 | 6.6 | 8.17 | 0 | 6.8 | |||
| R-4-50-2 | — | 85.17 | 5 | 5.06 | 1.77 | 5.7 | 5.59 | 0 | 6 | 6.22 | 0 | 6.1 | ||||
| R-4-50-3 | — | 91.08 | 5 | 3.28 | 0.65 | 5.5 | 6.63 | 0 | 5.9 | 7.93 | 0 | 6.3 | ||||
Fig 2
Comparison of PoR, Risk and |K| under different $ {\boldsymbol{\varphi}} $ in instance C-2-50-1"
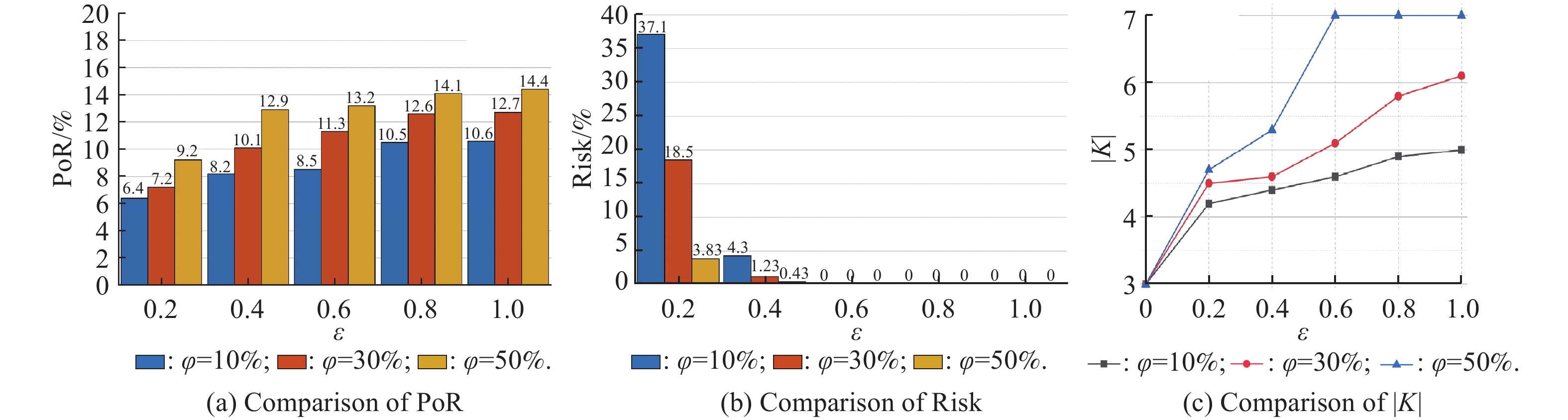
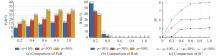
Fig 3
Comparison of PoR, Risk and |K| under different $ {\boldsymbol{\varphi }}$ in instance R-2-50-1"
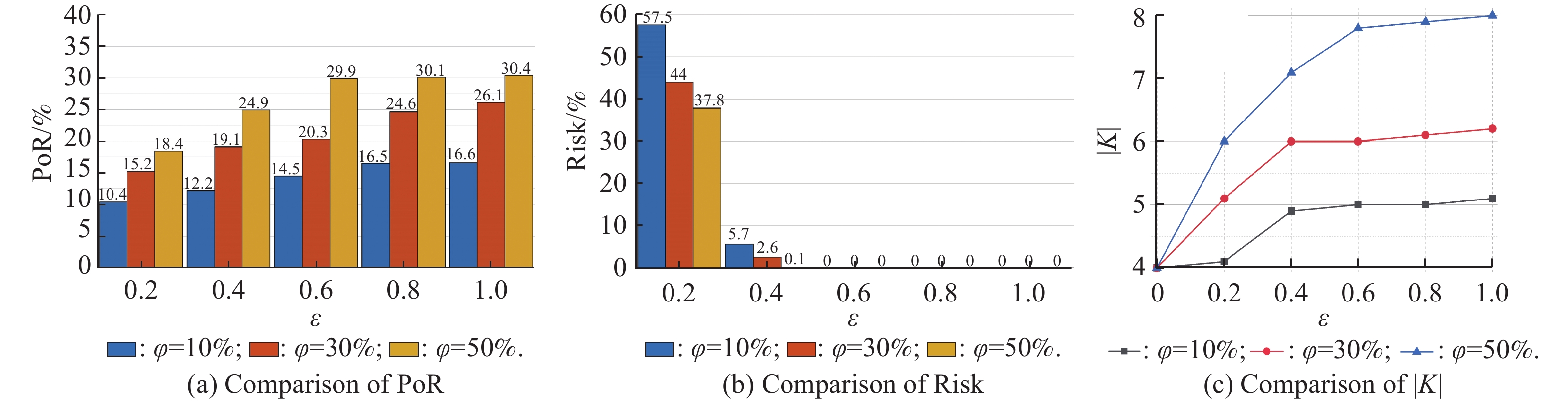
Fig 4
Comparison of PoR, Risk and |K| under different $ {\boldsymbol{\varphi}} $ in instance RC-2-50-1"
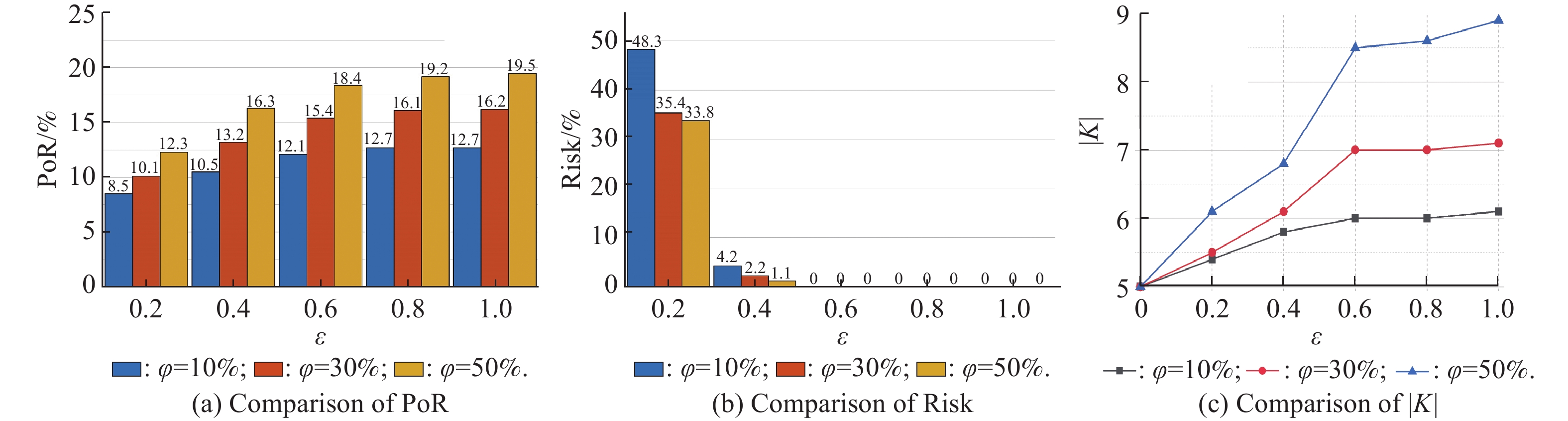

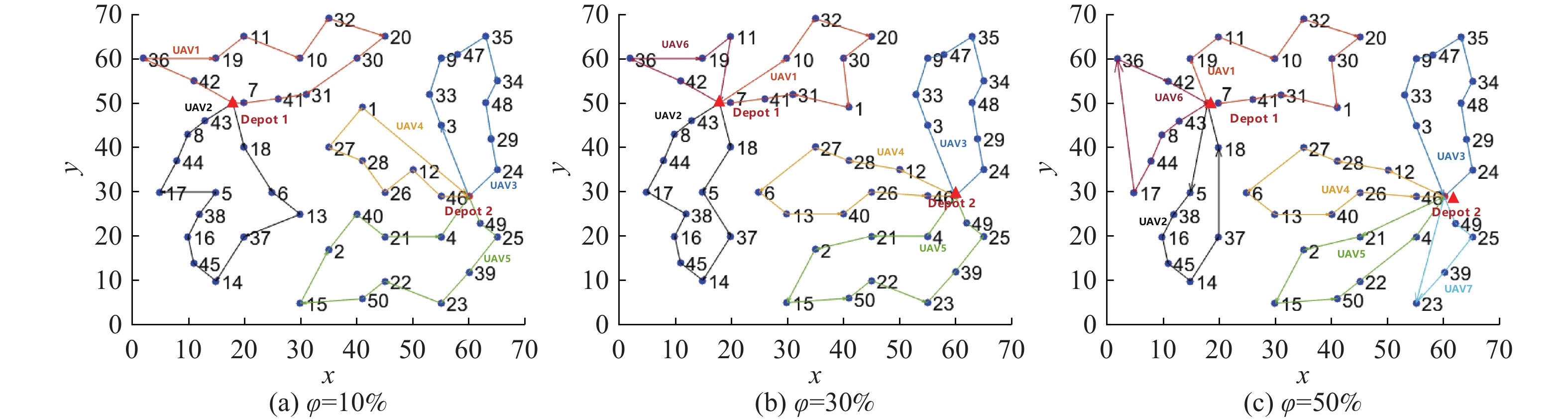
Fig 5
Path planning solutions for instance RC-2-50-1"
| 1 |
WU Y, LOW K H, PANG B Z, et al Swarm-based 4D path planning for drone operations in urban environments. IEEE Trans. on Vehicular Technology, 2021, 70 (8): 7464- 7479.
doi: 10.1109/TVT.2021.3093318 |
| 2 |
ZHANG Z J, ZHENG L N, ZHOU Y X, et al A novel finite-time-gain-adjustment controller design method for UAVs tracking time-varying targets. IEEE Trans. on Intelligent Transportation Systems, 2022, 23 (8): 12531- 12543.
doi: 10.1109/TITS.2021.3115153 |
| 3 |
PHAM D A, HAN S H Design of combined neural network and fuzzy logic controller for marine rescue drone trajectory-tracking. Journal of Marine Science and Engineering, 2022, 10 (11): 1716.
doi: 10.3390/jmse10111716 |
| 4 |
WENG Y Y, WU R Y, ZHENG Y J Cooperative truck-drone delivery path optimization under urban traffic restriction. Drones, 2023, 7 (1): 59.
doi: 10.3390/drones7010059 |
| 5 |
GUAN Q S, ZHANG X Q, XIE M H, et al Large-scale power inspection: a deep reinforcement learning approach. Frontiers in Energy Research, 2023, 10, 1054859.
doi: 10.3389/fenrg.2022.1054859 |
| 6 |
PUENTE-CASTRO A, RIVERO D, PAZOS A, et al A review of artificial intelligence applied to path planning in UAV swarms. Neural Computing and Applications, 2022, 34 (1): 153- 170.
doi: 10.1007/s00521-021-06569-4 |
| 7 |
ISRAR A, ALI Z A, ALKHAMMASH E H, et al Optimization methods applied to motion planning of unmanned aerial vehicles: a review. Drones, 2022, 6 (5): 126.
doi: 10.3390/drones6050126 |
| 8 |
AIT S A, SOUKANE A, MERAIHI Y, et al UAV path planning using optimization approaches: a survey. Archives of Computational Methods in Engineering, 2022, 29 (6): 4233- 4284.
doi: 10.1007/s11831-022-09742-7 |
| 9 |
YAHIA H S, MOHAMMED A S Path planning optimization in unmanned aerial vehicles using meta-heuristic algorithms: a systematic review. Environmental Monitoring and Assessment, 2023, 195 (1): 30.
doi: 10.1007/s10661-022-10590-y |
| 10 |
SORBELLI F B, CORO F, DAS S K, et al Energy-constrained delivery of goods with drones under varying wind conditions. IEEE Trans. on Intelligent Transportation Systems, 2021, 22 (9): 6048- 6060.
doi: 10.1109/TITS.2020.3044420 |
| 11 |
YANG X, CHEN J Y, DANG Y J, et al Fast depth prediction and obstacle avoidance on a monocular drone using probabilistic convolutional neural network. IEEE Trans. on Intelligent Transportation Systems, 2021, 22 (1): 156- 167.
doi: 10.1109/TITS.2019.2955598 |
| 12 |
HWANG M H, CHA H R, JUNG S Y Practical endurance estimation for minimizing energy consumption of multirotor unmanned aerial vehicles. Energies, 2018, 11 (9): 2221.
doi: 10.3390/en11092221 |
| 13 |
LU Y C, YANG J, YANG C A humanitarian vehicle routing problem synchronized with drones in time-varying weather conditions. Computers & Industrial Engineering, 2023, 184, 109563.
doi: 10.1016/j.cie.2023.109563 |
| 14 |
BELGE E, ALTAN A, HACIOGLU R Metaheuristic optimization-based path planning and tracking of quadcopter for payload hold-release mission. Electronics, 2022, 11 (8): 1208.
doi: 10.3390/electronics11081208 |
| 15 |
YE X Y, SONG F J, ZHANG Z Y, et al A review of small UAV navigation system based on multisource sensor fusion. IEEE Sensors Journal, 2023, 23 (17): 18926- 18948.
doi: 10.1109/JSEN.2023.3292427 |
| 16 |
YAN X C, FU T T, LIN H M, et al UAV detection and tracking in urban environments using passive sensors: a survey. Applied Sciences, 2023, 13 (20): 11320.
doi: 10.3390/app132011320 |
| 17 |
LUO H, LIANG Z Z, ZHU M N, et al Integrated optimization of unmanned aerial vehicle task allocation and path planning under steady wind. Plos One, 2018, 13 (3): e0194690.
doi: 10.1371/journal.pone.0194690 |
| 18 |
SOUTO A, ALFAIA R, CARDOSO E, et al UAV path planning optimization strategy: considerations of urban morphology, microclimate, and energy efficiency using Q-learning algorithm. Drones, 2023, 7 (2): 123.
doi: 10.3390/drones7020123 |
| 19 |
WANG J H, RAMIREZ A, XU Y Nonlinear direct data-driven control for UAV formation flight system. Journal of Systems Engineering and Electronics, 2023, 34 (6): 1409- 1418.
doi: 10.23919/JSEE.2023.000140 |
| 20 |
KIM S, KWAK J H, OH B, et al An optimal routing algorithm for unmanned aerial vehicles. Sensors, 2021, 21 (4): 1219.
doi: 10.3390/s21041219 |
| 21 |
LI X H, LI P F, ZHAO Y, et al A hybrid large neighborhood search algorithm for solving the multi depot UAV swarm routing problem. IEEE Access, 2021, 9, 104115- 104126.
doi: 10.1109/ACCESS.2021.3098863 |
| 22 |
GUERRIERO F, SURACE R, LOSCRI V, et al A multi-objective approach for unmanned aerial vehicle routing problem with soft time windows constraints. Applied Mathematical Modelling, 2014, 38 (3): 839- 852.
doi: 10.1016/j.apm.2013.07.002 |
| 23 |
DORLING K, HEINRICHS J, MESSIER G G, et al Vehicle routing problems for drone delivery. IEEE Trans. on Systems, Man, and Cybernetics: Systems, 2017, 47 (1): 70- 85.
doi: 10.1109/TSMC.2016.2582745 |
| 24 |
KIM S J, LIM G J, CHO J Drone flight scheduling under uncertainty on battery duration and air temperature. Computers & Industrial Engineering, 2018, 117, 291- 302.
doi: 10.1016/j.cie.2018.02.005 |
| 25 |
SONG Y J, ULMER M W, THOMAS B W, et al Building trust in home services—stochastic team-orienteering with consistency constraints. Transportation Science, 2020, 54 (3): 823- 838.
doi: 10.1287/trsc.2019.0927 |
| 26 |
JIN H, THOMAS B W Team orienteering with uncertain rewards and service times with an application to phlebotomist intrahospital routing. Networks, 2019, 73 (4): 453- 465.
doi: 10.1002/net.21875 |
| 27 |
VARAKANTHAM P, KUMAR A, LAU H C, et al Risk-sensitive stochastic orienteering problems for trip optimization in urban environments. ACM Transactions on Intelligent Systems and Technology, 2018, 9 (3): 24.
doi: 10.1145/3080575 |
| 28 |
BALCIK B, YANIKOGLU I A robust optimization approach for humanitarian needs assessment planning under travel time uncertainty. European Journal of Operational Research, 2020, 282 (1): 40- 57.
doi: 10.1016/j.ejor.2019.09.008 |
| 29 |
CHEN L, GENDREAU M, HA M H, et al A robust optimization approach for the road network daily maintenance routing problem with uncertain service time. Transportation Research Part E: Logistics and Transportation Review, 2016, 85, 40- 51.
doi: 10.1016/j.tre.2015.11.006 |
| 30 |
ZHANG Y, BALDACCI R, SIM M, et al Routing optimization with time windows under uncertainty. Mathematical Programming, 2019, 175, 263- 305.
doi: 10.1007/s10107-018-1243-y |
| 31 |
GOH J, SIM M Robust optimization made easy with ROME. Operations Research, 2011, 59 (4): 973- 985.
doi: 10.1287/opre.1110.0944 |
| 32 |
BERTSIMAS D, SIM M The price of robustness. Operations Research, 2004, 52 (1): 35- 53.
doi: 10.1287/opre.1030.0065 |
| 33 |
SOYSTER A L Technical note—convex programming with set-inclusive constraints and applications to inexact linear programming. Operations Research, 1973, 21 (5): 1154- 1157.
doi: 10.1287/opre.21.5.1154 |
| 34 |
KIRKPATRICK S, GELATT C D, VECCHI M P Optimization by simulated annealing. Science, 1983, 220 (4598): 671- 680.
doi: 10.1126/science.220.4598.671 |
| 35 |
SOLOMON M M Algorithms for the vehicle routing and scheduling problems with time window constraints. Operations Research, 1987, 35 (2): 254- 265.
doi: 10.1287/opre.35.2.254 |
| 36 |
NADERI B, GHOMI S M T F, AMINNAYERI M A high performing metaheuristic for job shop scheduling with sequence-dependent setup times. Applied Soft Computing, 2010, 10 (3): 703- 710.
doi: 10.1016/j.asoc.2009.08.039 |
| [1] | Haiquan SUN, Zhilong WANG, Xiaoxuan HU, Wei XIA. Hybrid genetic simulated annealing algorithm for agile Earth observation satellite scheduling considering cloud cover distribution [J]. Journal of Systems Engineering and Electronics, 2025, 36(6): 1595-1612. |
| [2] | Zeyu ZHOU, Yuhui WANG, Qingxian WU. Integrated fire/flight control of armed helicopters based on C-BFGS and distributionally robust optimization [J]. Journal of Systems Engineering and Electronics, 2024, 35(6): 1604-1620. |
| [3] | Bing WANG, Pengfei ZHANG, Yufeng HE, Xiaozhi WANG, Xianxia ZHANG. Scenario-oriented hybrid particle swarm optimization algorithm for robust economic dispatch of power system with wind power [J]. Journal of Systems Engineering and Electronics, 2022, 33(5): 1143-1150. |
| [4] | Ruiyang LI, Ming HE, Hongyue HE, Zhixue WANG, Cheng YANG. A branch and price algorithm for the robust WSOS scheduling problem [J]. Journal of Systems Engineering and Electronics, 2021, 32(3): 658-667. |
| [5] | Fan YUE, Shiji SONG, Peng JIA, Guangping WU, Han ZHAO. Robust single machine scheduling problem with uncertain job due dates for industrial mass production [J]. Journal of Systems Engineering and Electronics, 2020, 31(2): 350-358. |
| [6] | Chong Wang, Jinhui Tang, Xiaohang Cheng, Yingchen Liu, and Changchun Wang. Distributed cooperative task planning algorithm for multiple satellites in delayed communication environment [J]. Systems Engineering and Electronics, 2016, 27(3): 619-633. |
| [7] | Xiaolong Xu, Lingling Cao, and Xinheng Wang. Resource pre-allocation algorithms for low-energy task scheduling of cloud computing [J]. Journal of Systems Engineering and Electronics, 2016, 27(2): 457-469. |
| [8] | Xionghou Liu, Chao Sun, Yixin Yang, Jie Zhuo, and Yina Han. Low complexity MIMO sonar imaging using a virtual sparse linear array [J]. Journal of Systems Engineering and Electronics, 2016, 27(2): 370-378. |
| [9] | Weidong Jiang, Haowen Chen, and Xiang Li. Antenna geometry strategy with prior information for direction-finding MIMO radars [J]. Systems Engineering and Electronics, 2015, 26(3): 468-475. |
| [10] | Yifang Yang and Yuping Wang. Simulated annealing spectral clustering algorithm for image segmentation [J]. Journal of Systems Engineering and Electronics, 2014, 25(3): 514-522. |
| [11] | Jing Qiu, Xiaodong Tan, Guanjun Liu, and Kehong L¨u. Test selection and optimization for PHM based on failure evolution mechanism model [J]. Journal of Systems Engineering and Electronics, 2013, 24(5): 780-792. |
| [12] | Wenwu Chen, Zhengyu Cai, Rushan Chen, and Zhao Zhao. Optimizing polyphase sequences for orthogonal netted radar systems [J]. Journal of Systems Engineering and Electronics, 2012, 23(4): 529-535. |
| [13] | Tianran Zhou, Huagang Xiong, and Zhen Zhang. Hierarchical resource allocation for integrated modular avionics systems [J]. Journal of Systems Engineering and Electronics, 2011, 22(5): 780-787. |
| [14] | Jun Wang, Xiaoguang Gao, and Yongwen Zhu. Solving algorithm for TA optimization model based on ACO-SA [J]. Journal of Systems Engineering and Electronics, 2011, 22(4): 628-639. |
| [15] | Ke Wang, and Fajie Wei. Robust data envelopment analysis based MCDM with the consideration of uncertain data [J]. Journal of Systems Engineering and Electronics, 2010, 21(6): 981-989. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||