
Journal of Systems Engineering and Electronics ›› 2022, Vol. 33 ›› Issue (1): 170-179.doi: 10.23919/JSEE.2022.000017
• CONTROL THEORY AND APPLICATION • Previous Articles Next Articles
Wanping SONG1( ), Zengqiang CHEN1,2,*(), Mingwei SUN1(), Qinglin SUN1()
), Zengqiang CHEN1,2,*(), Mingwei SUN1(), Qinglin SUN1()
Received:2020-11-26
Accepted:2021-11-24
Online:2022-01-18
Published:2022-02-22
Contact:
Zengqiang CHEN
E-mail:1422501596@qq.com;chenzq@nankai.edu.cn;smw_sunmingwei@163.com;sunql@nankai.edu.cn
About author:Supported by:Wanping SONG, Zengqiang CHEN, Mingwei SUN, Qinglin SUN. Reinforcement learning based parameter optimization of active disturbance rejection control for autonomous underwater vehicle[J]. Journal of Systems Engineering and Electronics, 2022, 33(1): 170-179.
Add to citation manager EndNote|Reference Manager|ProCite|BibTeX|RefWorks
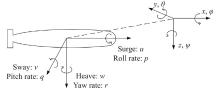
Fig 1
Coordinate frames and motion parameters"
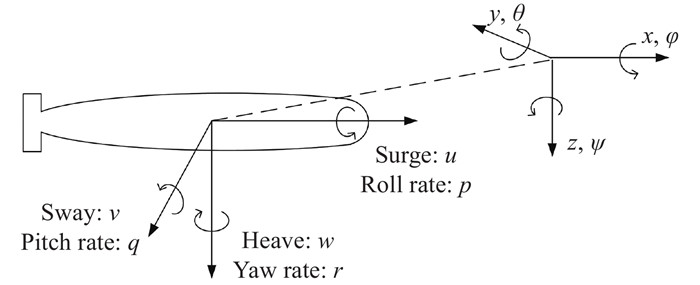
Table 1
Symbols and their meanings"
| Motion | Position and angle | Linear and angular velocity (Force and moment) |
| Surge | | |
| Sway | | |
| Heave | | |
| Roll | | |
| Pitch | | |
| Yaw | | |

Fig 2
AUV system work flowchart"

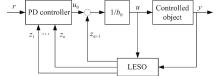
Fig 3
LADRC basic control structure"
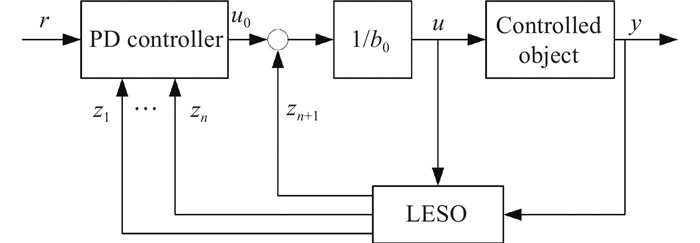
Fig 4
Q-Learning algorithm flowchart"
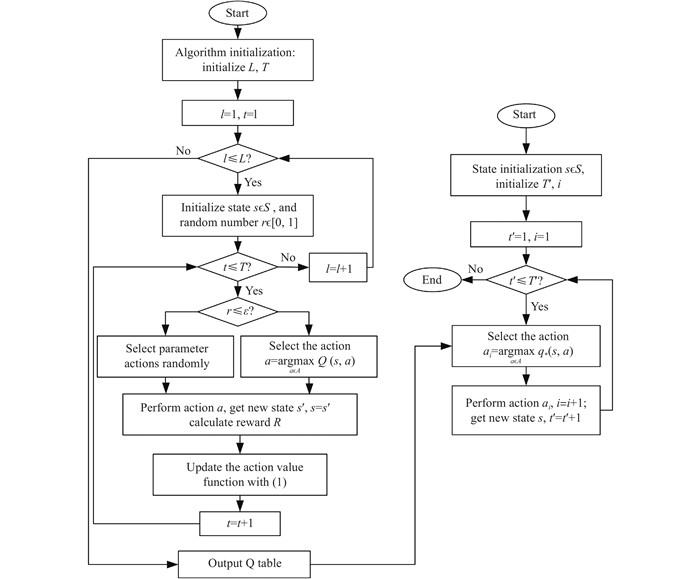
Fig 5
AUV control system based on Q-Learning"
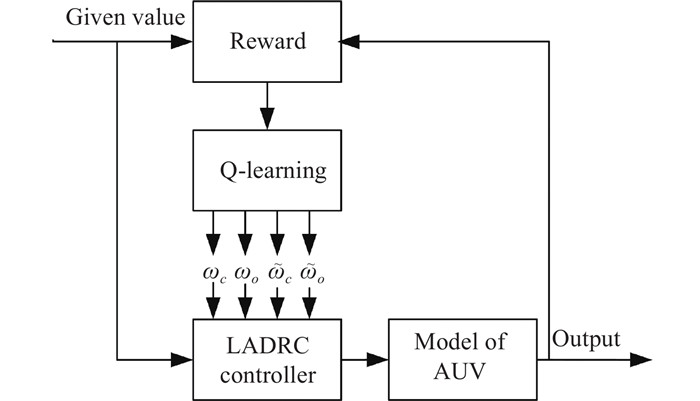
Table 2
Division of the states"
| | | ||||
| (?11,0.3] | (?0.3,0.1] | (?0.1,0.1) | [0.1,0.3) | [0.3,11) | |
| (?1,?0.3] | 1 | 6 | 11 | 16 | 21 |
| (?0.3,?0.1] | 2 | 7 | 12 | 17 | 22 |
| (?0.1,0.1) | 3 | 8 | 13 | 18 | 23 |
| [0.1,0.3) | 4 | 9 | 14 | 19 | 24 |
| [0.3,1) | 5 | 10 | 15 | 20 | 25 |
Fig 6
Length of each episode"
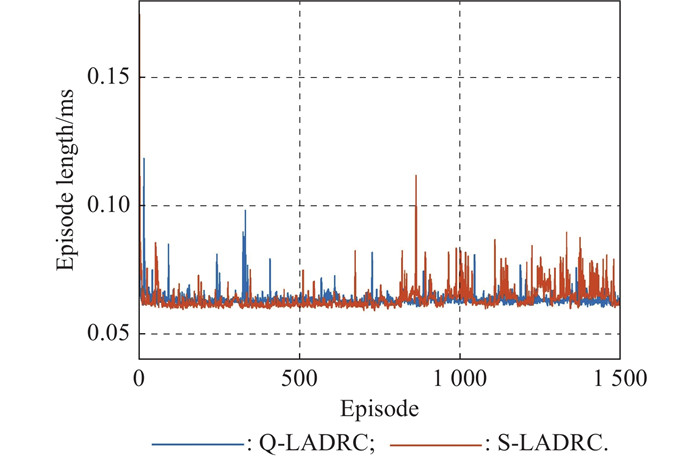
Fig 7
Depth control effects of two controllers with different training times"
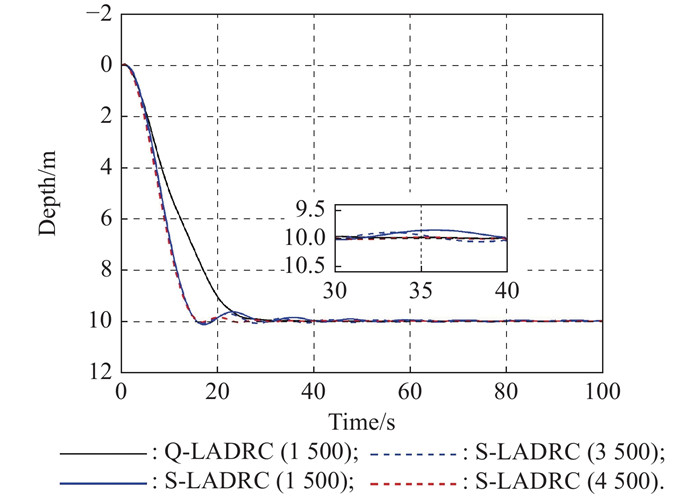
Fig 8
"
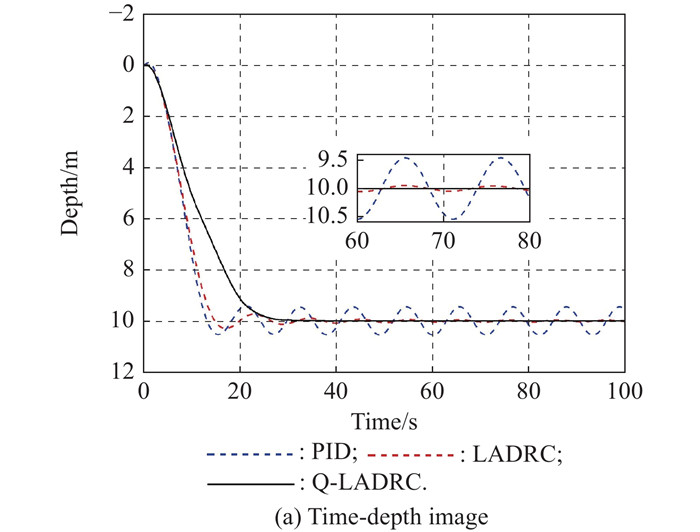

Fig 8
Parameters fixed PID,LADRC controller and Q-LADRC controller"
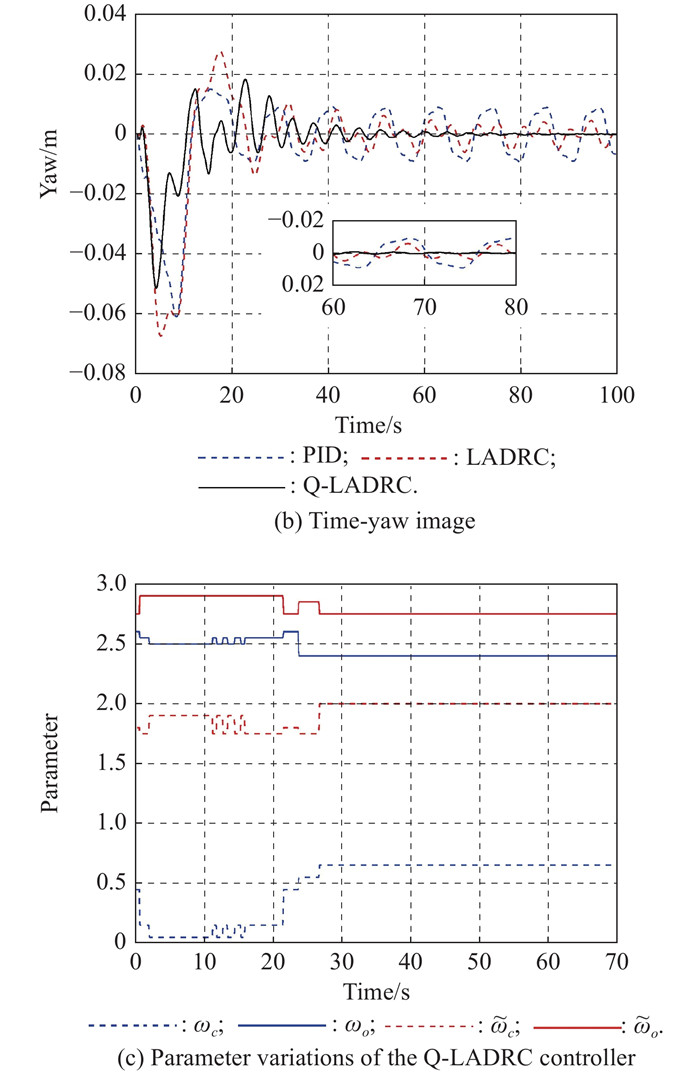
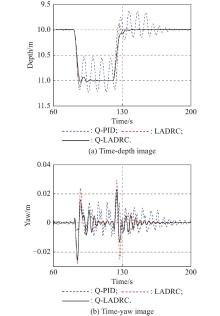
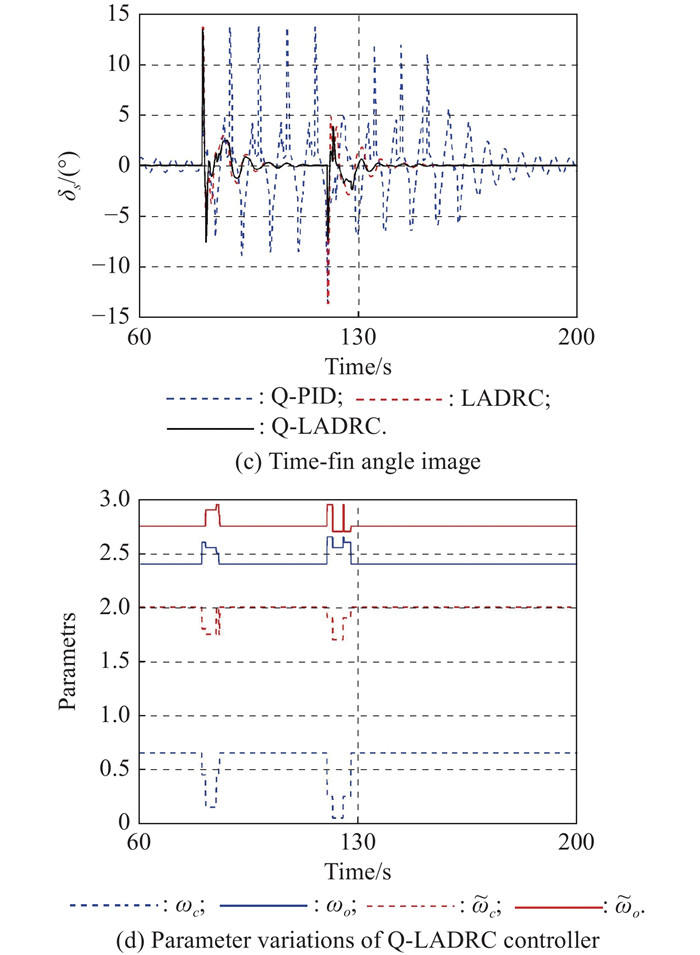
Fig 9
"
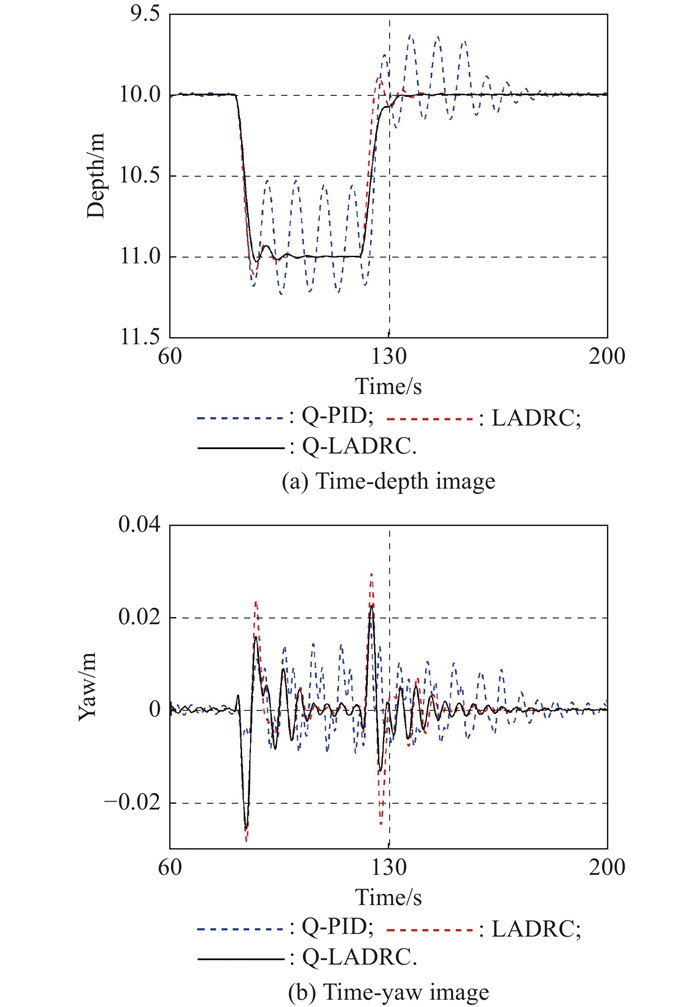

Fig 9
Parameters fixed LADRC, Q-PID and Q-LADRC controller"
| 1 |
ROBERT B Underwater robots: a review of technologies and applications. Industrial Robot: An International Journal, 2015, 42 (3): 186- 191.
doi: 10.1108/IR-01-2015-0010 |
| 2 | ZHANG F M, MARANI G, SMITH R N, et al Future trends in marine robotics [TC Spotlight]. IEEE Robotics & Automation Magazine, 2015, 22 (1): 14- 122. |
| 3 |
RYOSUKE K, SATOSHI O Development of hovering control system for an underwater vehicle to perform core internal inspections. Journal of Nuclear Science and Technology, 2016, 53 (4): 566- 573.
doi: 10.1080/00223131.2015.1064331 |
| 4 | MANECIUS S J, ASOKAN T. Station keeping control of underwater robots using disturbance force measurements. Journal of Marine Science and Technology, 2016, 21(1): 70−85. |
| 5 |
SATO Y, MAKI T, KUME A, et al Path replanning method for an AUV in natural hydrothermal vent fields: toward 3D imaging of a hydrothermal chimney. Marine Technology Society Journal, 2014, 48 (3): 104- 114.
doi: 10.4031/MTSJ.48.3.5 |
| 6 |
RIBAS D, PALOMERAS N, RIDAO P, et al Girona 500 AUV: from survey to intervention. IEEE/ASME Trans. on Mechatronics, 2012, 17 (1): 46- 53.
doi: 10.1109/TMECH.2011.2174065 |
| 7 | ANTONELLI G. Underwater robots: motion and force control of vehicle-manipulator systems. Switzerland: Springer, 2010. |
| 8 | PRZEMYSŁAW H Decoupled PD set-point controller for underwater vehicles. Ocean Engineering, 2009, 36 (6): 529- 534. |
| 9 | TAHA E, MOHAMED Z, KAMAL Y T Control for dynamic positioning and way-point tracking of underactuated autonomous underwater vehicles using sliding mode control. Journal of Intelligent & Robotic Systems, 2019, 95 (3/4): 1113- 1132. |
| 10 |
MOHAMMAD H K, SAEED B Modeling and control of autonomous underwater vehicle (AUV) in heading and depth attitude via self-adaptive fuzzy PID controller. Journal of Marine Science and Technology, 2015, 20 (3): 559- 578.
doi: 10.1007/s00773-015-0312-7 |
| 11 |
XUE Q Adaptive coordinated tracking control of multiple autonomous underwater vehicles. Ocean Engineering, 2014, 91, 84- 90.
doi: 10.1016/j.oceaneng.2014.08.019 |
| 12 | HAN J Q. Auto-disturbance-rejection controller and its applications. Control and Decision, 1998, 13(1): 19–23. (in Chinese) |
| 13 | HAN J Q. From PID to active disturbance rejection control. IEEE Trans. on Industrial Electronics, 2009, 56(3): 900–906. |
| 14 | GAO Z Q. Scaling and bandwidth-parameterization based controller tuning. Proc. of the American Control Conference, 2006: 4989−4996. |
| 15 |
LIU J J, SUN M W, CHEN Z Q, et al High AOA decoupling control for aircraft based on ADRC. Journal of Systems Engineering and Electronics, 2020, 31 (2): 393- 402.
doi: 10.23919/JSEE.2020.000016 |
| 16 |
CHEN Z Q, QIN B B, SUN M W, et al Q-learning-based parameters adaptive algorithm for active disturbance rejection control and its application to ship course control. Neurocomputing, 2020, 408, 51- 63.
doi: 10.1016/j.neucom.2019.10.060 |
| 17 |
ZHENG Y M, CHEN Z Q, HUANG Z Y, et al Active disturbance rejection controller for multi-area interconnected power system based on reinforcement learning. Neurocomputing, 2021, 425, 149- 159.
doi: 10.1016/j.neucom.2020.03.070 |
| 18 |
LI J H, LEE P M Design of an adaptive nonlinear controller for depth control of an autonomous underwater vehicle. Ocean Engineering, 2005, 32 (17/18): 2165- 2181.
doi: 10.1016/j.oceaneng.2005.02.012 |
| 19 |
LIU S Y, WANG D W, POH E Non-linear output feedback tracking control for AUVs in shallow wave disturbance condition. International Journal of Control, 2008, 81 (11): 1806- 1823.
doi: 10.1080/00207170801898885 |
| 20 | XIANG X B, YU C Y, ZHANG Q Robust fuzzy 3D path following for autonomous underwater vehicle subject to uncertainties. Computers and Operations Research, 2016, 84, 165- 177. |
| 21 | LIANG X, QU X R, WANG N, et al. Three-dimensional trajectory tracking of an underactuated AUV based on fuzzy dynamic surface control. IET Intelligent Transport Systems, 2020, 14(5): 364−370. |
| 22 |
LI Y, QIU X H, LIU X D, et al Deep reinforcement learning and its application in autonomous fitting optimization for attack areas of UCAVs. Journal of Systems Engineering and Electronics, 2020, 31 (4): 734- 742.
doi: 10.23919/JSEE.2020.000048 |
| 23 | SHEN Y X, SHAO K Y, REN W J, et al Diving control of autonomous underwater vehicle based on improved active disturbance rejection control approach. Neurocomputing, 2016, 173 (3): 1377- 1385. |
| 24 | SUTTON R, BARTO A. Reinforcement learning: an introduction. Massachusetts: MIT Press, 1998. |
| 25 |
LOW E S, ONG P, CHEAH K C Solving the optimal path planning of a mobile robot using improved Q-learning. Robotics and Autonomous Systems, 2019, 115, 143- 161.
doi: 10.1016/j.robot.2019.02.013 |
| 26 |
XIANG X B, YU C Y, ZHANG Q, et al Path-following control of an AUV: fully actuated versus under-actuated configuration. Marine Technology Society Journal, 2016, 50 (1): 34- 47.
doi: 10.4031/MTSJ.50.1.4 |
| 27 | PRESTERO T. Verification of a six-degree of freedom simulation model for the REMUS autonomous underwater vehicle. Massachusetts Institute of Technology, 2001. DOI:10.1575/1912/3040. |
| 28 |
YANG R, SUN M W, CHEN Z Q Active disturbance rejection control on first-order plant. Journal of Systems Engineering and Electronics, 2011, 22 (1): 95- 102.
doi: 10.3969/j.issn.1004-4132.2011.01.012 |
| 29 | TANG D, GAO Z Q, ZHANG X H Design of predictive active disturbance rejection controller for turbidity. Control Theory and Applications, 2017, 34 (1): 101- 108. |
| 30 |
XUE W C, HUANG Y Performance analysis of active disturbance rejection tracking control for a class of uncertain LTI systems. ISA Transactions, 2015, 58, 133- 154.
doi: 10.1016/j.isatra.2015.05.001 |
| [1] | Xiaofeng LI, Lu DONG, Changyin SUN. Hybrid Q-learning for data-based optimal control of non-linear switching system [J]. Journal of Systems Engineering and Electronics, 2022, 33(5): 1186-1194. |
| [2] | Xiangyang LIN, Qinghua XING, Fuxian LIU. Choice of discount rate in reinforcement learning with long-delay rewards [J]. Journal of Systems Engineering and Electronics, 2022, 33(2): 381-392. |
| [3] | Xin ZENG, Yanwei ZHU, Leping YANG, Chengming ZHANG. A guidance method for coplanar orbital interception based on reinforcement learning [J]. Journal of Systems Engineering and Electronics, 2021, 32(4): 927-938. |
| [4] | Ye MA, Tianqing CHANG, Wenhui FAN. A single-task and multi-decision evolutionary game model based on multi-agent reinforcement learning [J]. Journal of Systems Engineering and Electronics, 2021, 32(3): 642-657. |
| [5] | Yu HUANG, Lihua WU, Qiang YU. Underwater square-root cubature attitude estimator by use of quaternion-vector switching and geomagnetic field tensor [J]. Journal of Systems Engineering and Electronics, 2020, 31(4): 804-814. |
| [6] | Qian WANG, Chuanding ZHANG, Deyong XIAN. Multi-channel signal parameters joint optimization for GNSS terminals [J]. Journal of Systems Engineering and Electronics, 2018, 29(1): 39-47. |
| [7] | Hong Li, Mingyong Liu, and Kun Liu. Bio-inspired geomagnetic navigation method for autonomous underwater vehicle#br# [J]. Journal of Systems Engineering and Electronics, 2017, 28(6): 1203-1209. |
| [8] | Kangsheng Dong, Hanqiao Huang, Changqiang Huang, and Zhuoran Zhang. Trajectory online optimization for unmanned combat aerial vehicle using combined strategy [J]. Systems Engineering and Electronics, 2017, 28(5): 963-970. |
| [9] | Qingwei Liang, Tianyuan Sun, and Dongdong Wang. Time-varying reliability indexes for multi-AUV cooperative system [J]. Systems Engineering and Electronics, 2017, 28(2): 401-406. |
| [10] | Qingwei Liang, Tianyuan Sun, and Dongdong Wang. Reliability indexes for multi-AUV cooperative systems [J]. Systems Engineering and Electronics, 2017, 28(1): 179-. |
| [11] | Mingyong Liu, Baogui Xu, and Xingguang Peng. Cooperative path planning for multi-AUV in time-varying ocean flows [J]. Systems Engineering and Electronics, 2016, 27(3): 612-618. |
| [12] | Min Zhu, Chunling Yang, and Weiliang Li. Autotuning algorithm of particle swarm PID parameter based on D-Tent chaotic model [J]. Journal of Systems Engineering and Electronics, 2013, 24(5): 828-837. |
| [13] | Zheng Yongkang, Chen Weirong, Dai Chaohua & Wang Weibo. Stochastic focusing search: a novel optimization algorithm for real-parameter optimization [J]. Journal of Systems Engineering and Electronics, 2009, 20(4): 869-876. |
| [14] | Xia Qunli, Guo Tao & Qi Zaikang. Study of trajectory optimization using terminal-node adaptive-altered spline algorithm [J]. Journal of Systems Engineering and Electronics, 2009, 20(3): 551-557. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||