
Journal of Systems Engineering and Electronics ›› 2023, Vol. 34 ›› Issue (1): 224-235.doi: 10.23919/JSEE.2023.000013
• CONTROL THEORY AND APPLICATION • Previous Articles Next Articles
Defeng HE1,*( ), Jie LUO1(), Di LIN2(), Shiming YU1()
), Jie LUO1(), Di LIN2(), Shiming YU1()
Received:2022-01-27
Online:2023-02-18
Published:2023-03-03
Contact:
Defeng HE
E-mail:hdfzj@zjut.edu.cn;2111903059@zjut.edu.cn;2111803060@zjut.edu.cn;ysm@zjut.edu.cn
About author:Supported by:Defeng HE, Jie LUO, Di LIN, Shiming YU. Flexible predictive power-split control for battery-supercapacitor systems of electric vehicles using IVHS[J]. Journal of Systems Engineering and Electronics, 2023, 34(1): 224-235.
Add to citation manager EndNote|Reference Manager|ProCite|BibTeX|RefWorks
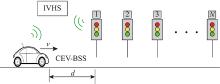
Fig 1
A schematic of the traffic scenario"
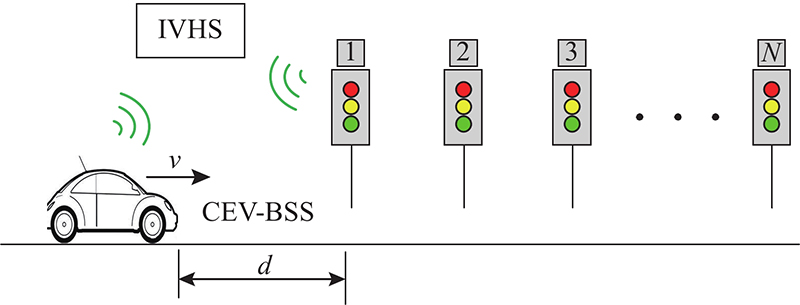
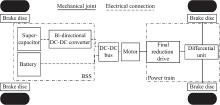
Fig 2
Configuration of the CEV-BSS"
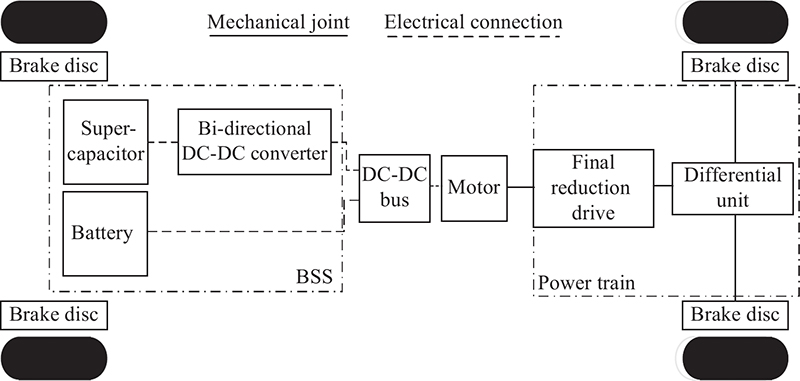
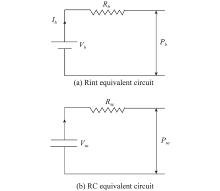
Fig 3
Rint/RC equivalent circuit for the BSS"
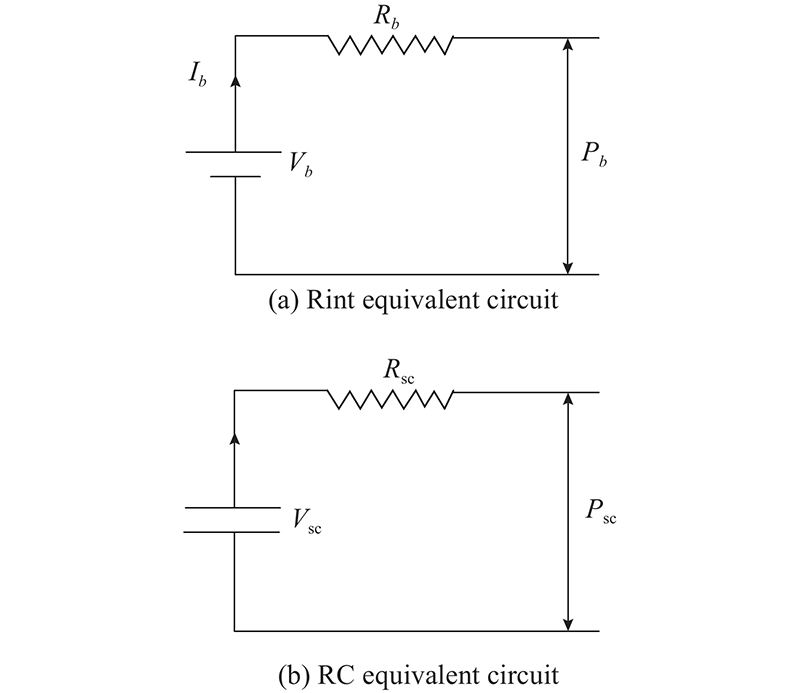
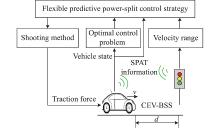
Fig 4
A schematic of the proposed strategy"
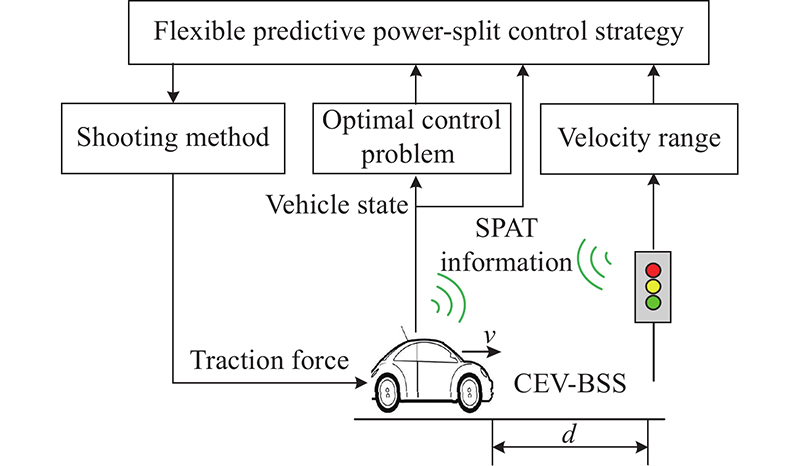
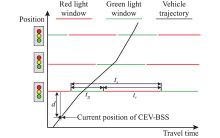
Fig 5
A schematic of velocity range calculation"
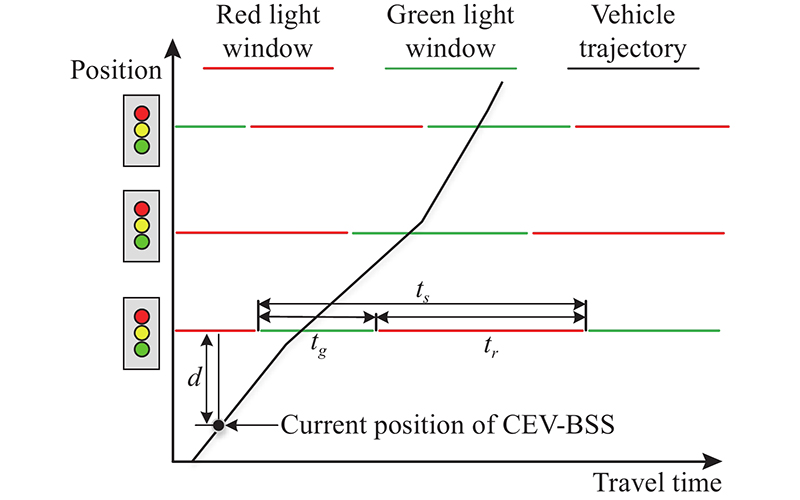

Fig 6
A schematic of the shooting method"
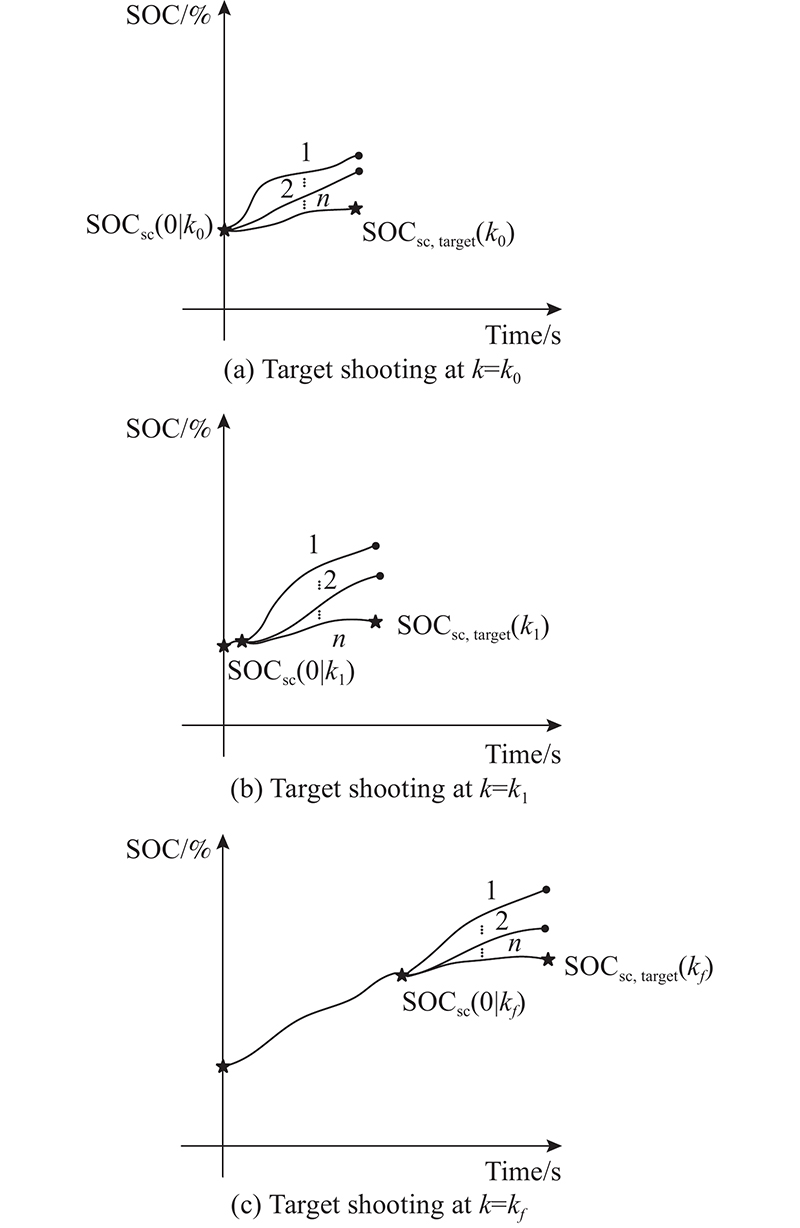
Table 1
Parameters for the longitudinal dynamics"
| Parameter | Value |
| m/kg | 1550 |
| ρ/(kg·m−3) | 1.23 |
| A/m2 | 2.68 |
| Cr | 0.014 |
| Cd | 0.275 |
Table 2
Parameters of the BSS"
| Component | Parameter | Value |
| Battery pack | Vb/V | 312 |
| Q/Ah | 90 | |
| Rb/Ω | 0.3 | |
| Supercapacitor pack | Vsc,max/V | 310 |
| Csc/F | 2500 | |
| Rsc/Ω | 0.01 |
Table 3
Simulation parameters"
| Parameter | Value | Parameter | Value | |
| (umin/umax)/N | 3100 | (vmin/vmax)/(m·s−1) | 0/22 | |
| (SOCb,min/SOCb,max)/% | 20/100 | SOCsc,ref/% | 75 | |
| (Pb,min/Pb,max)/kW | −20/35 | λ0 | 0.1 | |
| (SOCsc,min/SOCsc,max)/% | 50/100 | Np | 20 | |
| (Psc,min/Psc,max)/kW | −105/105 | Ns | 10 | |
| ζ | 0.001 | Δt | 1 |

Fig 7
Overview of Hangzhou, China collected from AMAP"
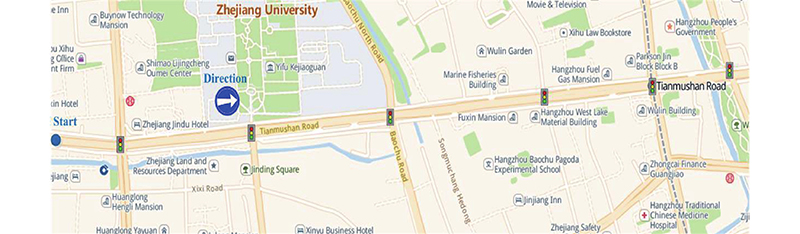
Table 4
Details of SPAT information"
| Signal light | Initial state/s | Interval (tr/tg)/s | Distance/m |
| 1st | r-26 | 45/20 | 210 |
| 2nd | g-2 | 40/25 | 428 |
| 3rd | g-18 | 45/20 | 460 |
| 4th | g-3 | 20/45 | 490 |
| 5th | g-6 | 40/25 | 357 |
| 6th | r-24 | 45/20 | 255 |
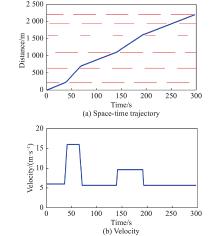
Fig 8
Space-time trajectory and velocity of the CEV-BSS"
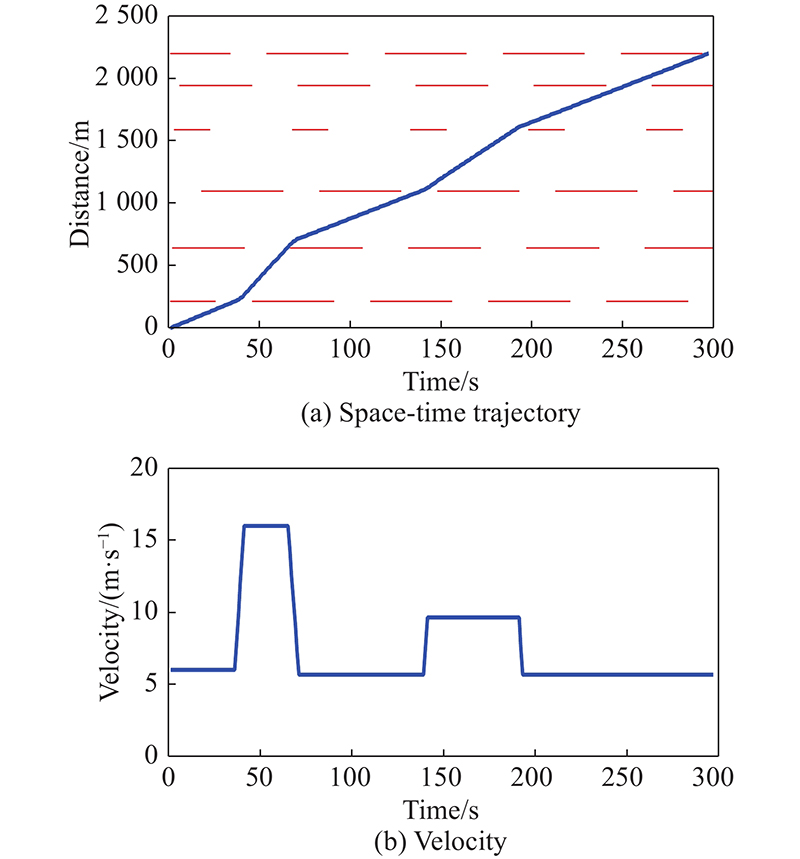
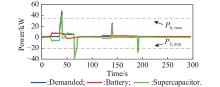
Fig 9
Power-split results of the proposed strategy"
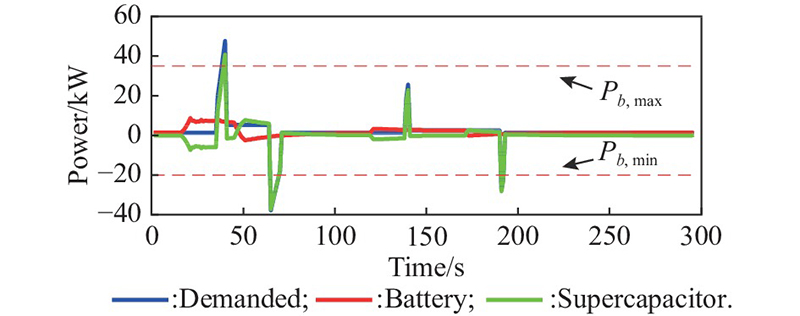
Fig 10
Evaluation of SOC for the BSS"
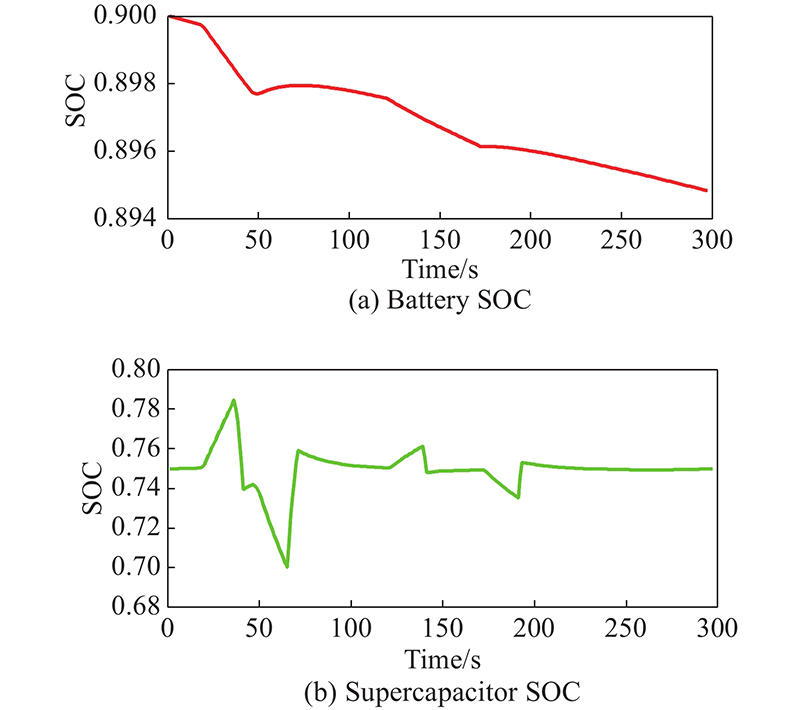
Table 5
Details of simulation scenario"
| Signal light | Initial state/s | Interval (tr/tg)/s | Distance/m |
| 1st | r-16 | 42/13 | 451 |
| 2nd | r-12 | 38/15 | 376 |
| 3rd | r-31 | 43/14 | 414 |
| 4th | g-14 | 39/14 | 315 |
| 5th | r-21 | 38/16 | 311 |
Fig 11
Space-time trajectories and velocities based on the proposed and the hierarchical method"
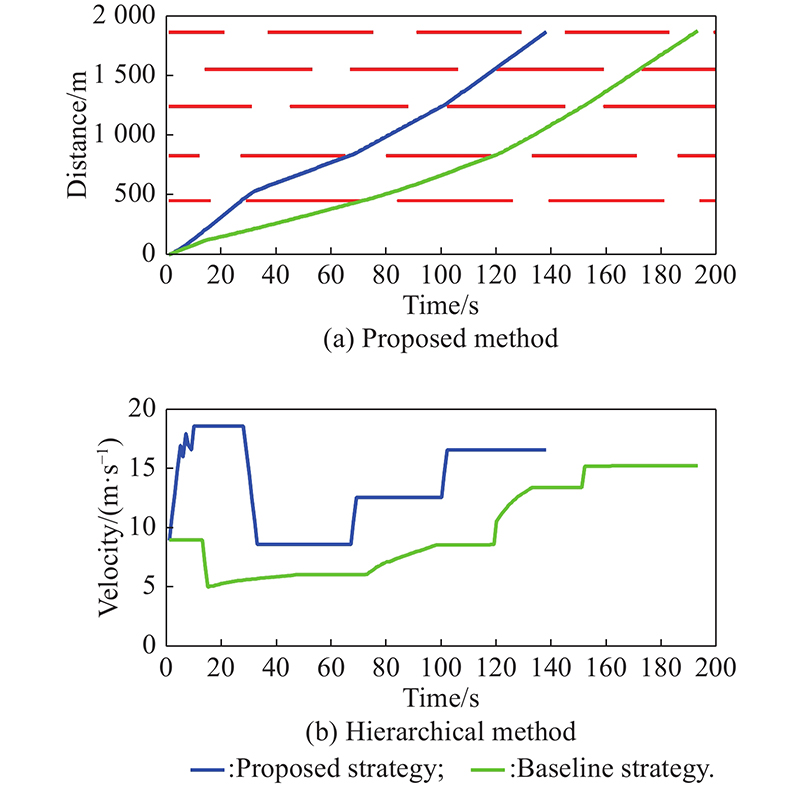
Fig 12
Power-split results for the proposed strategy and the baseline strategy"
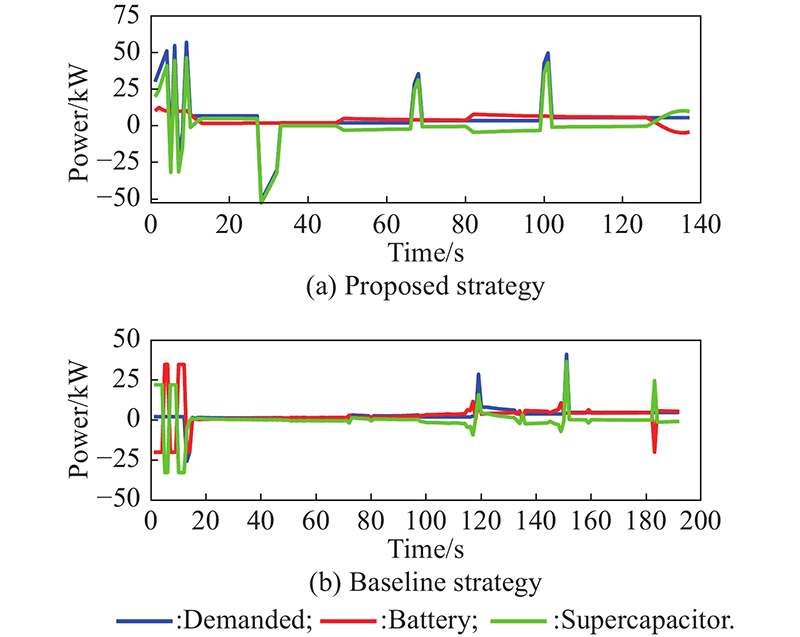
Fig 13
Accumulative current throughput of battery $\varSigma$ |Ib| for the proposed and baseline strategy "
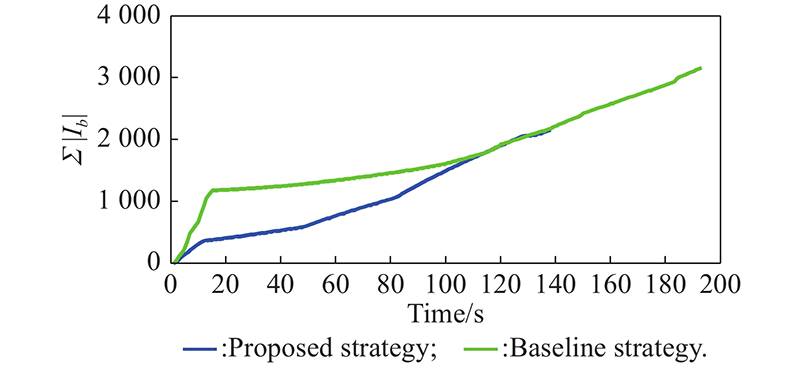
Table 6
Travel time for proposed and baseline strategies"
| Scenario | Travel time/s | Improvement/% | |
| Proposed | Baseline | ||
| L05 | 138 | 193 | 29 |
| L10 | 388 | 482 | 20 |
| L15 | 639 | 791 | 19 |
| L20 | 887 | 1050 | 16 |
Table 7
Accumulative current throughput of battery"
| Scenario | Accumulative current throughput/mA | Improvement/% | |
| Proposed | Baseline | ||
| L05 | 2.1545 | 3.1636 | 68 |
| L10 | 3.4135 | 9.9033 | 34 |
| L15 | 5.9290 | 21.234 | 28 |
| L20 | 7.5566 | 25.553 | 30 |
Table 8
Final SOC of battery % "
| Scenario | Final SOC | Improvement | |
| Proposed | Baseline | ||
| L05 | 89.39 | 89.40 | −0.01 |
| L10 | 89.09 | 89.07 | 0.02 |
| L15 | 88.40 | 88.28 | 0.12 |
| L20 | 87.90 | 87.55 | 0.35 |
Table 9
Average CPU time ms "
| Scenario | Proposed | Baseline | |
| High level | Low level | ||
| L05 | 188.0 | 456.4 | 87.0 |
| L10 | 163.8 | 450.8 | 89.2 |
| L15 | 144.5 | 450.2 | 117.1 |
| L20 | 145.5 | 473.1 | 121.2 |
| 1 |
LIAN R Z, PENG J K, WU Y K, et al Rule-interposing deep reinforcement learning based energy management strategy for power-split hybrid electric vehicle. Energy, 2020, 197, 117297.
doi: 10.1016/j.energy.2020.117297 |
| 2 | CAO J, ALI E A new battery/ultracapacitor hybrid energy storage system for electric, hybrid, and plug-in hybrid electric vehicles. IEEE Trans. on Power Electronics, 2012, 27 (1): 122- 132. |
| 3 |
SONG Z Y, LI J Q, HAN X B, et al Multi-objective optimization of a semi-active battery/supercapacitor energy storage system for electric vehicles. Applied Energy, 2014, 135, 212- 224.
doi: 10.1016/j.apenergy.2014.06.087 |
| 4 |
CHUNG C H, JANGRA S, LAI Q Z, et al Optimization of electric vehicle charging for battery maintenance and degradation management. IEEE Trans. on Transportation Electrification, 2020, 6 (3): 958- 969.
doi: 10.1109/TTE.2020.3000181 |
| 5 |
ZHANG Q, DENG W E, LI G Stochastic control of predictive power management for battery/supercapacitor hybrid energy storage systems of electric vehicles. IEEE Trans. on Industrial Informatics, 2018, 14 (7): 3023- 3030.
doi: 10.1109/TII.2017.2766095 |
| 6 |
NGUYEN B H, GERMAN R, JOAO P F, et al Real-time energy management of battery/supercapacitor electric vehicles based on an adaptation of Pontryagin’s minimum principle. IEEE Trans. on Vehicular Technology, 2019, 68 (1): 203- 212.
doi: 10.1109/TVT.2018.2881057 |
| 7 |
ABODULLAH A M, LIU Z F, RIZZO D M, et al An integrated design and control optimization framework for hybrid military vehicle using lithium-ion battery and supercapacitor as energy storage devices. IEEE Trans. on Transportation Electrification, 2019, 5 (1): 239- 251.
doi: 10.1109/TTE.2018.2869038 |
| 8 |
SHEN J Y, KHALIGH A Design and real-time controller implementation for a battery-ultracapacitor hybrid energy storage system. IEEE Trans. on Industrial Informatics, 2016, 12 (5): 1910- 1918.
doi: 10.1109/TII.2016.2575798 |
| 9 |
DUSMEZ S, KHALIGH A A supervisory power-splitting approach for a new ultra-capacitor-battery vehicle deploying two propulsion machines. IEEE Trans. on Industrial Informatics, 2014, 10 (3): 1960- 1971.
doi: 10.1109/TII.2014.2299237 |
| 10 |
CHEN Z, MI C C, XIA B, et al Energy management of power-split plug-in hybrid electric vehicles based on simulated annealing and Pontryagin’s minimum principle. Journal of Power Sources, 2014, 272, 160- 168.
doi: 10.1016/j.jpowsour.2014.08.057 |
| 11 |
SUN H C, FU Z M, TAO F Z, et al Data-driven reinforcement-learning-based hierarchical energy management strategy for fuel cell/battery/ultracapacitor hybrid electric vehicles. Journal of Power Sources, 2020, 455, 227964.
doi: 10.1016/j.jpowsour.2020.227964 |
| 12 |
TRAN D D, MAJID V, BAGHDADI M E, et al Thorough state-of-the-art analysis of electric and hybrid vehicle powertrains: topologies and integrated energy management strategies. Renewable and Sustainable Energy Reviews, 2020, 119, 109596.
doi: 10.1016/j.rser.2019.109596 |
| 13 |
QU X B, YU Y, ZHOU M F, et al Jointly dampening traffic oscillations and improving energy consumption with electric, connected and automated vehicles: a reinforcement learning based approach. Applied Energy, 2020, 257, 114030.
doi: 10.1016/j.apenergy.2019.114030 |
| 14 | XU F G, SHEN T L Look-ahead prediction-based real-time optimal energy management for connected HEVs. IEEE Trans. on Vehicular Technology, 2020, 63 (3): 2537- 2551. |
| 15 |
GONG X, WANG J Y, MA B L, et al Real-time integrated power and thermal management of connected HEVs based on hierarchical model predictive control. IEEE/ASME Trans. on Mechatronics, 2021, 26 (3): 1271- 1282.
doi: 10.1109/TMECH.2021.3070330 |
| 16 |
YAO Z H, ZHAO B, YUAN T F, et al Reducing gasoline consumption in mixed connected automated vehicles environment: a joint optimization framework for traffic signals and vehicle trajectory. Journal of Cleaner Production, 2020, 265, 121836.
doi: 10.1016/j.jclepro.2020.121836 |
| 17 |
WU J L, ZOU Y, ZHANG X D, et al A hierarchical energy management for hybrid electric tracked vehicle considering velocity planning with pseudospectral method. IEEE Trans. on Transportation Electrification, 2020, 6 (2): 703- 716.
doi: 10.1109/TTE.2020.2973577 |
| 18 |
GUO L L, GAO B Z, CHEN H Optimal energy management for HEVs in eco-driving applications using bi-level MPC. IEEE Trans. on Intelligent Transportation Systems, 2017, 18 (8): 2153- 2162.
doi: 10.1109/TITS.2016.2634019 |
| 19 | ZHAO L H, MAHBUB A M, ANDREAS A M Optimal vehicle dynamics and powertrain control for connected and automated vehicles. Proc. of the Conference on Control Technology and Applications, 2019, 33- 38. |
| 20 |
XIE S B, QI S W, LANG K, et al Coordinated management of connected plug-in hybrid electric buses for energy saving, inter-vehicle safety, and battery health. Applied Energy, 2020, 268, 115028.
doi: 10.1016/j.apenergy.2020.115028 |
| 21 | SANGJAE B, YEOJUN K, GUANETTI J, et al Design and implementation of ecological adaptive cruise control for autonomous driving with communication to traffic lights. Proc. of the American Control Conference, 2019, 33- 38. |
| 22 |
YE F, HAO P, QI X W, et al Prediction-based eco-approach and departure at signalized intersections with speed fore- casting on preceding vehicles. IEEE Trans. on Intelligent Transportation Systems, 2019, 20 (4): 1378- 1389.
doi: 10.1109/TITS.2018.2856809 |
| 23 |
YUAN J N, YANG L Predictive energy management strategy for connected 48V hybrid electric vehicles. Energy, 2019, 187, 115952.
doi: 10.1016/j.energy.2019.115952 |
| 24 |
HE X Z, WU X K Eco-driving advisory strategies for a platoon of mixed gasoline and electric vehicles in a connected vehicle system. Transportation Research Part D: Transport and Environment, 2018, 63, 907- 922.
doi: 10.1016/j.trd.2018.07.014 |
| 25 |
HE D F, WANG L, SUN J On stability of multiobjective NMPC with objective prioritization. Automatica, 2015, 57, 189- 198.
doi: 10.1016/j.automatica.2015.04.024 |
| 26 |
QIU L H, QIAN L J, ZOMORODI H, et al Global optimal energy management control strategies for connected four-wheel-drive hybrid electric vehicles. IET Intelligent Transportation Systems, 2017, 11 (5): 264- 272.
doi: 10.1049/iet-its.2016.0197 |
| 27 |
YU K J, YANG J Q, DAISUKE Y Model predictive control for hybrid vehicle ecological driving using traffic signal and road slope information. Control Theory Technology, 2015, 13 (1): 17- 28.
doi: 10.1007/s11768-015-4058-x |
| 28 |
HE D F, SHI Y J, LI H P, et al Multi-objective predictive cruise control for connected vehicle systems on urban conditions with InPA-SQP. Optimal Control Applications and Methods, 2019, 40 (3): 479- 498.
doi: 10.1002/oca.2489 |
| 29 |
BAISRAVAN H, LIN R N, PISU P Hierarchical control strategies for energy management of connected hybrid electric vehicles in urban roads. Transportation Research Part C: Emerging Technologies, 2016, 62, 70- 86.
doi: 10.1016/j.trc.2015.11.013 |
| 30 |
HUANG Y J, WANG H, AMIR K, et al Model predictive control power management strategies for HEVs: a review. Journal of Power Sources, 2017, 341, 91- 106.
doi: 10.1016/j.jpowsour.2016.11.106 |
| 31 |
YU S M, LIN D, SUN Z, et al Efficient model predictive control for real-time energy optimization of battery-supercapacitors in electric vehicles. International Journal of Energy Research, 2020, 44 (9): 7495- 7506.
doi: 10.1002/er.5473 |
| 32 |
ZHENG C H, LI W, LIANG Q An energy management strategy of hybrid energy storage systems for electric vehicle applications. IEEE Trans. on Sustainable Energy, 2018, 9 (4): 1880- 1888.
doi: 10.1109/TSTE.2018.2818259 |
| 33 |
ZHANG F Q, HU X S, LANGRAI R, et al Energy management strategies of connected HEVs and PHEVs: recent progress and outlook. Progress in Energy and Combustion Science, 2019, 73, 235- 256.
doi: 10.1016/j.pecs.2019.04.002 |
| 34 | ATKINSON C, LEWIS A, SALVIA A, et al Powertrain innovations for connected and autonomous vehicles. Proc. of the Powertrain Innovation Workshop, 2015, 1- 8. |
| 35 | KAMAL M A S, MUKAI M, MURATA J, et al. Model predictive control of vehicles on urban roads for improved fuel economy. IEEE Trans. on Control Systems Technology, 2013, 21(3): 831–841. |
| 36 |
JING W L, LAI C H, WONG S H W, et al Battery-supercapacitor hybrid energy storage system in standalone DC microgrids: a review. IET Renewable Power Generation, 2017, 11 (4): 461- 469.
doi: 10.1049/iet-rpg.2016.0500 |
| 37 |
GOLCHOUBIAN P, AZAD N L Real- time nonlinear model predictive control of a battery-supercapacitor hybrid energy storage system in electric vehicles. IEEE Trans. on Vehicular Technology, 2017, 66 (11): 9678- 9688.
doi: 10.1109/TVT.2017.2725307 |
| 38 | CANNON M, LIAO W H, BASIL K Efficient MPC optimization using Pontryagin’s minimum principle. Proc. of the 45th Conference on Decision and Control, 2006, 5459- 5464. |
| 39 |
XIE S B, HU X S, XIN Z K, et al Pontryagin’s minimum principle based model predictive control of energy management for a plug-in hybrid electric bus. Applied Energy, 2019, 236, 893- 905.
doi: 10.1016/j.apenergy.2018.12.032 |
| 40 | CICIC M, XIONG X, JIN L, et al Coordinating vehicle platoons for highway bottleneck decongestion and throughput improvement. IEEE Trans. on Intelligent Transportation Systems, 2022, 23 (7): 8959- 8971. |
| [1] | FARAJZADEH-DEVIN Mohammad-Ghassem, HOSSEINI SANI Seyed Kamal. Enhanced two-loop model predictive control design for linear uncertain systems [J]. Journal of Systems Engineering and Electronics, 2021, 32(1): 220-227. |
| [2] | Xunhong Lv, Bin Jiang, Ruiyun Qi, and Jing Zhao. Survey on nonlinear reconfigurable flight control [J]. Journal of Systems Engineering and Electronics, 2013, 24(6): 971-983. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||