
Journal of Systems Engineering and Electronics ›› 2023, Vol. 34 ›› Issue (2): 439-459.doi: 10.23919/JSEE.2023.000051
• CONTROL THEORY AND APPLICATION • Previous Articles
Lu DONG1( ), Zichen HE2,3(), Chunwei SONG3(), Changyin SUN3,4,*()
), Zichen HE2,3(), Chunwei SONG3(), Changyin SUN3,4,*()
Received:2022-03-08
Online:2023-04-18
Published:2023-04-18
Contact:
Changyin SUN
E-mail:ldong90@seu.edu.cn;1910646@tongji.edu.cn;2030739@tongji.edu.cn;cysun@seu.edu.cn
About author:Supported by:Lu DONG, Zichen HE, Chunwei SONG, Changyin SUN. A review of mobile robot motion planning methods: from classical motion planning workflows to reinforcement learning-based architectures[J]. Journal of Systems Engineering and Electronics, 2023, 34(2): 439-459.
Add to citation manager EndNote|Reference Manager|ProCite|BibTeX|RefWorks

Fig 1
An overall architecture diagram of the classical motion planning workflow"
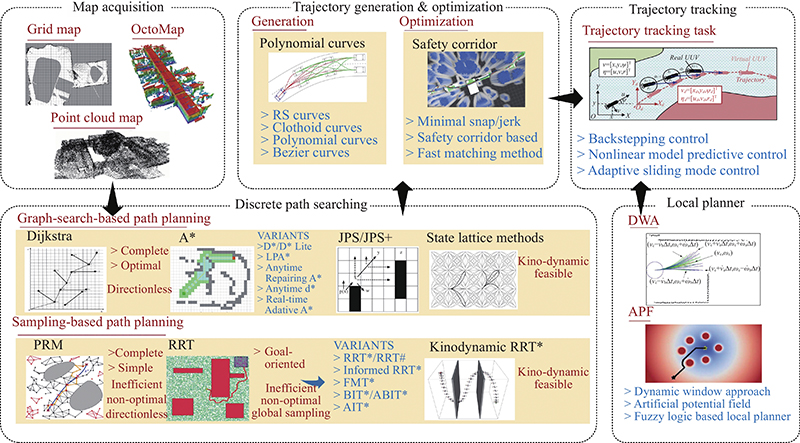

Fig 2
A summary diagram of RL-based MP algorithms for the single mobile robot operation"
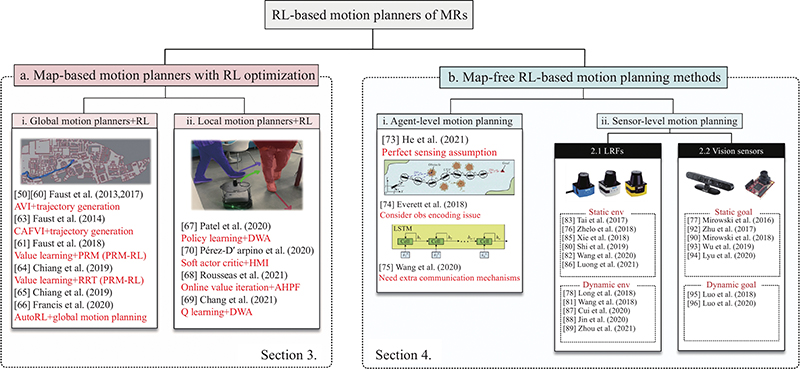
Fig 3
Architecture of NavA3C visual navigation method with several auxiliary tasks including depth prediction and closure detection [77] "
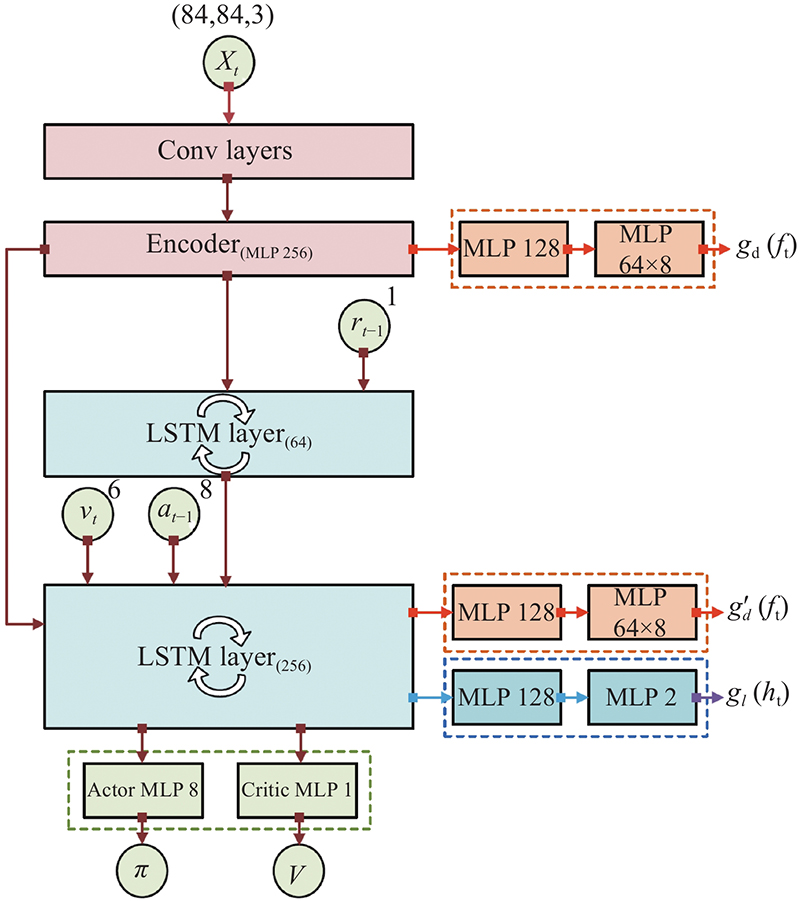

Fig 4
Overall architecture of the deep siamese actor-critic based target-driven indoor navigation algorithm [92] "
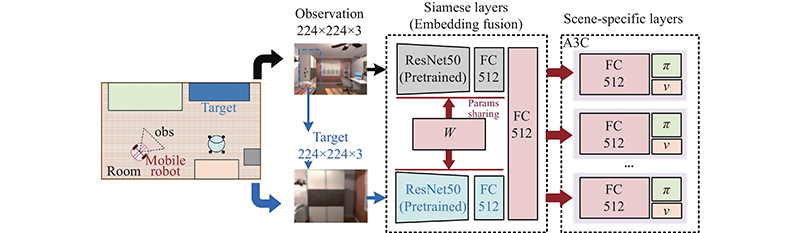
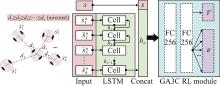
Fig 5
Overall architecture of GA3C-CADRL in [74] "
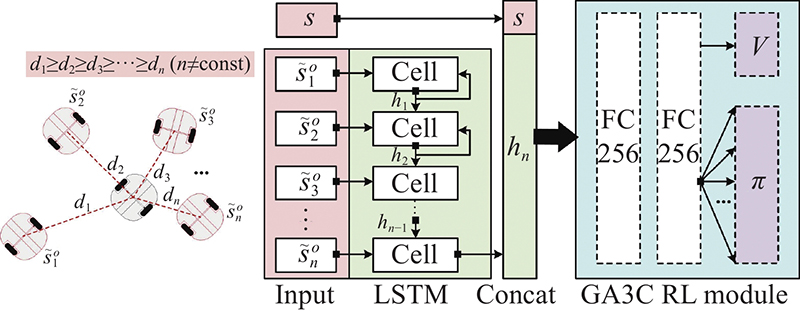

Fig 6
Overall framework of the distributed PPO-based multi-scale mobile robots MP algorithm in [78] "
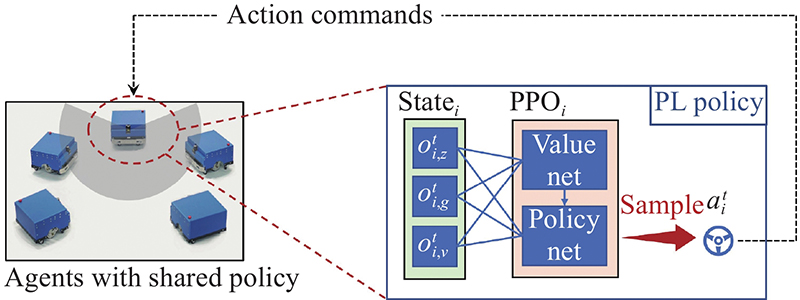

Fig 7
Hybrid MP framework in [101] "
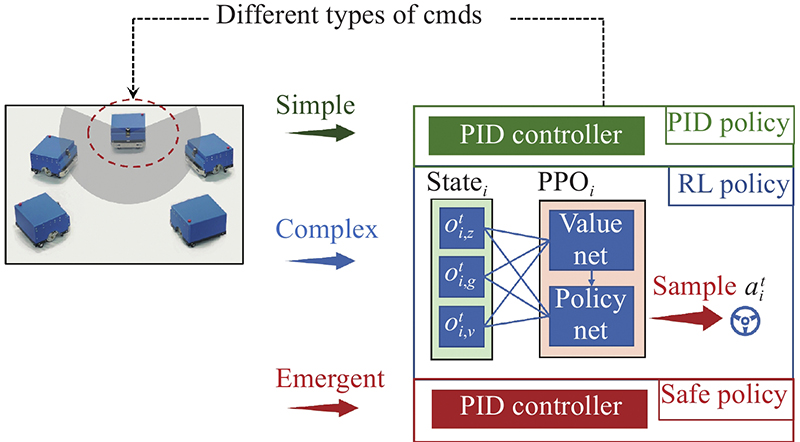

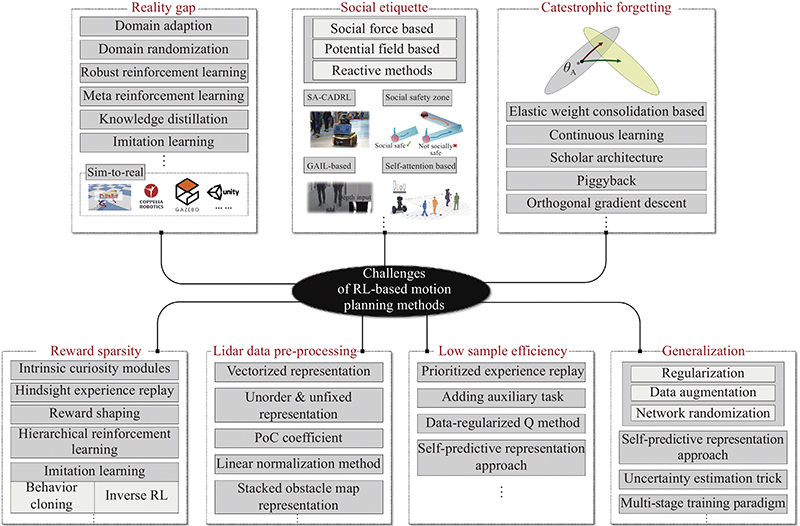
Fig 8
A summary diagram of several issues existing in RL-based MP methods"
| 1 | XIAO X S, LIU B, WARNELL G, et al. Motion control for mobile robot navigation using machine learning: a survey. https://arxiv.org/abs/2011.13112. |
| 2 |
SUN C Y, LIU W Z, DONG L Reinforcement learning with task decomposition for cooperative multiagent systems. IEEE Trans. on Neural Networks and Learning Systems, 2021, 32 (5): 2054- 2065.
doi: 10.1109/TNNLS.2020.2996209 |
| 3 | ARADI S Survey of deep reinforcement learning for motion planning of autonomous vehicles. IEEE Trans. on Intelligent Transportation Systems, 2020, 23 (2): 740- 759. |
| 4 |
ARULKUMARAN K, DEISENROTH M P, BRUNDAGE M, et al Deep reinforcement learning: a brief survey. IEEE Signal Processing Magazine, 2017, 34 (6): 26- 38.
doi: 10.1109/MSP.2017.2743240 |
| 5 |
DONG L, ZHONG X N, SUN C Y, et al Event-triggered adaptive dynamic programming for continuous-time systems with control constraints. IEEE Trans. on Neural Networks and Learning Systems, 2017, 28 (8): 1941- 1952.
doi: 10.1109/TNNLS.2016.2586303 |
| 6 | DONG L, YUAN X, SUN C Y Event-triggered receding horizon control via actor-critic design. Science China Information Sciences, 2020, 63 (5): 1869- 1919. |
| 7 | OLEYNIKOVA H, TAYLOR Z, FEHR M, et al Voxblox: incremental 3d Euclidean signed distance fields for on-board MAV planning. Proc. of the IEEE/RSJ International Conference on Intelligent Robots and Systems, 2017, 1366- 1373. |
| 8 | HAN L X, GAO F, ZHOU B Y, et al Fiesta: Fast incremental Euclidean distance fields for online motion planning of aerial robots. Proc. of the IEEE/RSJ International Conference on Intelligent Robots and Systems, 2019, 4423- 4430. |
| 9 |
QUAN L, HAN L X, ZHOU B Y, et al Survey of UAV motion planning. IET Cyber-systems and Robotics, 2020, 2 (1): 14- 21.
doi: 10.1049/iet-csr.2020.0004 |
| 10 | CLAUSSMANN L, REVILLOUD M, GRUYER D, et al A review of motion planning for highway autonomous driving. IEEE Trans. on Intelligent Transportation Systems, 2019, 21 (5): 1826- 1848. |
| 11 | CHOSET H M, LYNCH K M, HUTCHINSON S, et al. Principles of robot motion: theory, algorithms, and implementation. London: MIT Press, 2005. |
| 12 |
GONZALEZ D, PEREZ J, MILANES V, et al A review of motion planning techniques for automated vehicles. IEEE Trans. on Intelligent Transportation Systems, 2016, 17 (4): 1135- 1145.
doi: 10.1109/TITS.2015.2498841 |
| 13 | WANG H J, YU Y, YUAN Q B. Application of Dijkstra algorithm in robot path-planning. Proc. of the International Conference on Mechanic Automation and Control Engineering, 2011: 1067−1069. |
| 14 |
HART P E, NILSSON N J, RAPHAEL B A formal basis for the heuristic determination of minimum cost paths. IEEE Trans. on Systems Science and Cybernetics, 1968, 4 (2): 100- 107.
doi: 10.1109/TSSC.1968.300136 |
| 15 | STENTZ A Optimal and efficient path planning for partially known environments. Intelligent Unmanned Ground Vehicles, 1997, 388, 203- 220. |
| 16 |
KOENIG S, LIKHACHEV M, FURCY D Lifelong planning A*. Artificial Intelligence, 2004, 155 (1/2): 93- 146.
doi: 10.1016/j.artint.2003.12.001 |
| 17 | BELANOVA D, MACH M, SINCAK P, et al Path planning on robot based on D* lite algorithm. Proc. of the World Symposium on Digital Intelligence for Systems and Machines, 2018, 125- 130. |
| 18 | HARABOR D, GRASTIEN A Online graph pruning for pathfinding on grid maps. Proc. of the AAAI Conference on Artificial Intelligence, 2011, 1114- 1119. |
| 19 | HE Z C, DONG L, SUN C Y, et al Asynchronous multithreading reinforcement-learning-based path planning and tracking for unmanned underwater vehicle. IEEE Trans. on Systems, Man, and Cybernetics: Systems, 2021, 52 (5): 2757- 2769. |
| 20 | JIANG C J, SUN S F, LIU J L, et al Global path planning of mobile robot based on improved JPS+ algorithm. Proc. of the Chinese Automation Congress, 2020, 2387- 2392. |
| 21 | BULITKO V, LEE G Learning in real-time search: a unifying framework. Journal of Artificial Intelligence Research, 2006, 25 (1): 119- 157. |
| 22 | KOENIG S, LIKHACHEV M Real-time adaptive A*. Proc. of the 5th International Joint Conference on Autonomous Agents and Multiagent Systems, 2006, 281- 288. |
| 23 | PIVTORAIKO M, KELLY A Generating state lattice motion primitives for differentially constrained motion planning. Proc. of the International Conference on Intelligent Robots and Systems, 2012, 101- 108. |
| 24 | PIVTORAIKO M, KELLY A Kinodynamic motion planning with state lattice motion primitives. Proc. of the IEEE/RSJ International Conference on Intelligent Robots and Systems, 2011, 2172- 2179. |
| 25 |
ZHOU B Y, GAO F, WANG L Q, et al Robust and efficient quadrotor trajectory generation for fast autonomous flight. IEEE Robotics and Automation Letters, 2019, 4 (4): 3529- 3536.
doi: 10.1109/LRA.2019.2927938 |
| 26 | GONZALEZ D, PEREZ J, MILANES V, et al A review of motion planning techniques for automated vehicles. IEEE Trans. on Intelligent Transportation Systems, 2015, 17 (4): 1135- 1145. |
| 27 |
KARAMAN S, FRAZZOLI E Sampling-based algorithms for optimal motion planning. The International Journal of Robotics Research, 2011, 30 (7): 846- 894.
doi: 10.1177/0278364911406761 |
| 28 |
NASIR J, ISLAM F, MALIK U, et al RRT*-SMART: a rapid convergence implementation of RRT. International Journal of Advanced Robotic Systems, 2013, 10 (7): 299.
doi: 10.5772/56718 |
| 29 | ARSLAN O, TSIOTRAS P Use of relaxation methods in sampling-based algorithms for optimal motion planning. Proc. of the IEEE International Conference on Robotics and Automation, 2013, 2421- 2428. |
| 30 | WEBB D J, BERG J Kinodynamic RRT*: asymptotically optimal motion planning for robots with linear dynamics. Proc. of the IEEE International Conference on Robotics and Automation, 2013, 5054- 5061. |
| 31 | GAMMELL J D, SRINIVASA S S, BARFOOT T D Informed RRT*: optimal sampling-based path planning focused via direct sampling of an admissible ellipsoidal heuristic. Proc. of the IEEE/RSJ International Conference on Intelligent Robots and Systems, 2014, 2997- 3004. |
| 32 | GAMMELL J D, SRINIVASA S S, BARFOOT T D Batch informed trees (BIT*): sampling-based optimal planning via the heuristically guided search of implicit random geometric graph. Proc. of the IEEE International Conference on Robotics and Automation, 2015, 3067- 3074. |
| 33 |
JANSON L, SCHMERLING E, CLARK A, et al Fast marching tree: a fast marching sampling-based method for optimal motion planning in many dimensions. The International Journal of Robotics Research, 2015, 34 (7): 883- 921.
doi: 10.1177/0278364915577958 |
| 34 | STRUB M P, GAMMELL J D Advanced BIT*(ABIT*): sampling-based planning with advanced graph-search techniques. Proc. of the IEEE International Conference on Robotics and Automation, 2020, 130- 136. |
| 35 | STRUB M P, GAMMELL J D Adaptively informed trees (AIT*): fast asymptotically optimal path planning through adaptive heuristics. Proc. of the IEEE International Conference on Robotics and Automation, 2020, 3191- 3198. |
| 36 | NADERI K, RAJAMAKI J, HAMALAINEN P RT-RRT*: a real-time path planning algorithm based on RRT. Proc. of the ACM SIGGRAPH Conference on Motion in Games, 2015, 113- 118. |
| 37 | PIMENTEL J M, ALVIM M S, CAMPOS M F, et al Information-driven rapidly-exploring random tree for efficient environment exploration. Journal of Intelligent & Robotic Systems, 2018, 91 (2): 313- 331. |
| 38 |
FRAICHARD T, SCHEUER A From Reeds and Shepp’s to continuous-curvature paths. IEEE Trans. on Robotics, 2004, 20 (6): 1025- 1035.
doi: 10.1109/TRO.2004.833789 |
| 39 | BREZAK M, PETROVIC I Real-time approximation of clothoids with bounded error for path planning applications. IEEE Trans. on Robotics, 2013, 30 (2): 507- 515. |
| 40 | GAO F, WU W, LIN Y, et al Online safe trajectory generation for quadrotors using fast marching method and Bernstein basis polynomial. Proc. of the IEEE International Conference on Robotics and Automation, 2018, 344- 351. |
| 41 | MELLINGER D, KUMAR V Minimum snap trajectory generation and control for quadrotors. Proc. of the IEEE International Conference on Robotics and Automation, 2011, 2520- 2525. |
| 42 | RICHTER C, BRY A, ROY N Polynomial trajectory planning for aggressive quadrotor flight in dense indoor environments. Robotics Research, 2016, 114, 649- 666. |
| 43 | CHEN J, LIU T B, SHEN S J Online generation of collision-free trajectories for quadrotor flight in unknown cluttered environments. Proc. of the IEEE International Conference on Robotics and Automation, 2016, 1476- 1483. |
| 44 | GAO F, LIN Y, SHEN S J Gradient-based online safe trajectory generation for quadrotor flight in complex environments. Proc. of the IEEE/RSJ International Conference on Intelligent Robots and Systems, 2017, 3681- 3688. |
| 45 |
MAJD K, RAZEGHI-JAHROMI M, HOMAIFAR A A stable analytical solution method for car-like robot trajectory tracking and optimization. IEEE/CAA Journal of Automatica Sinica, 2020, 7 (1): 39- 47.
doi: 10.1109/JAS.2019.1911816 |
| 46 | SUN B, ZHU D Q, YANG S X A bioinspired filtered backstepping tracking control of 7000-m manned submarine vehicle. IEEE Trans. on Industrial Electronics, 2013, 61 (7): 3682- 3693. |
| 47 |
IBRAHIM A E-S B Wheeled mobile robot trajectory tracking using sliding mode control. Journal of Computer Science, 2016, 12 (1): 48- 55.
doi: 10.3844/jcssp.2016.48.55 |
| 48 | OSUSKY J, CIGANEK J. Trajectory tracking robust control for two wheels robot. Proc. of the 2018 Cybernetics & Informatics, 2018. DOI: 10.1109/CYBERI.2018.8337559. |
| 49 | MEVO B B, SAAD M R, FAREH R. Adaptive sliding mode control of wheeled mobile robot with nonlinear model and uncertainties. Proc. of the IEEE Canadian Conference on Electrical Computer Engineering, 2018. DOI: 10.1109/CCECE.2018.8447570. |
| 50 |
NASCIMENTO T P, DOREA C E, GONCALVES L M G Nonholonomic mobile robots ’ trajectory tracking model predictive control: a survey. Robotica, 2018, 36 (5): 676- 696.
doi: 10.1017/S0263574717000637 |
| 51 |
GAVILAN F, VAZQUEZ R, CAMACHO E F An iterative model predictive control algorithm for UAV guidance. IEEE Trans. on Aerospace and Electronic Systems, 2015, 51 (3): 2406- 2419.
doi: 10.1109/TAES.2015.140153 |
| 52 | ISKANDER A, ELKASSED O, ELBADAWY A Minimum snap trajectory tracking for a quadrotor UAV using nonlinear model predictive control. Proc. of the Novel Intelligent and Leading Emerging Sciences Conference, 2020, 344- 349. |
| 53 |
LINDQVIST B, MANSOURI S S, AGHAMOHAMMADI A, et al Nonlinear MPC for collision avoidance and control of UAVs with dynamic obstacles. IEEE Robotics and Automation Letters, 2020, 5 (4): 6001- 6008.
doi: 10.1109/LRA.2020.3010730 |
| 54 | CUI C C, ZHU D Q, SUN B Trajectory re-planning and tracking control of unmanned underwater vehicles on dynamic model. Proc. of the Chinese Control and Decision Conference, 2018, 1971- 1976. |
| 55 | DI W, LI C H, NA G, et al Local path planning of mobile robot based on artificial potential field. Proc. of the Chinese Control Conference, 2020, 3677- 3682. |
| 56 | MINGUEZ J, MONTANO L Nearness diagram navigation (nd): a new real time collision avoidance approach. Proc. of the IEEE/RSJ International Conference on Intelligent Robots and Systems, 2000, 2094- 2100. |
| 57 | SEDER M, PETROVIC I Dynamic window based approach to mobile robot motion control in the presence of moving obstacles. Proc. of the IEEE International Conference on Robotics and Automation, 2007, 1986- 1991. |
| 58 | CHEN W D, ZHU Q G Mobile robot path planning based on fuzzy algorithms. Acta Electronica Sinica, 2011, 39 (4): 971- 974. |
| 59 | FAUST A, PALUNKO I, CRUZ P, et al Learning swing-free trajectories for UAVs with a suspended load. Proc. of the IEEE International Conference on Robotics and Automation, 2013, 4902- 4909. |
| 60 | FAUST A, PALUNKO I, CRUZ P, et al Automated aerial suspended cargo delivery through reinforcement learning. Artificial Intelligence, 2017, 247 (1): 381- 398. |
| 61 | FAUST A, OSLUND K, RAMIREZ O, et al PRM-RL: long-range robotic navigation tasks by combining reinforcement learning and sampling-based planning. Proc. of the IEEE International Conference on Robotics and Automation, 2018, 5113- 5120. |
| 62 | SILVER D, LEVER G, HEESS N, et al Deterministic policy gradient algorithms. Proc. of the International Conference on Machine Learning, 2014, 387- 395. |
| 63 |
FAUST A, RUYMGAART P, SALMAN M, et al Continuous action reinforcement learning for control-affine systems with unknown dynamics. IEEE/CAA Journal of Automatica Sinica, 2014, 1 (3): 323- 336.
doi: 10.1109/JAS.2014.7004690 |
| 64 |
CHIANG H-T L, HSU J, FISER M, et al RL-RRT: kinodynamic motion planning via learning reachability estimators from RL policies. IEEE Robotics and Automation Letters, 2019, 4 (4): 4298- 4305.
doi: 10.1109/LRA.2019.2931199 |
| 65 |
CHIANG H-T L, FAUST A, FISER M, et al Learning navigation behaviors end-to-end with AutoRL. IEEE Robotics and Automation Letters, 2019, 4 (2): 2007- 2014.
doi: 10.1109/LRA.2019.2899918 |
| 66 |
FRANCIS A, FAUST A, CHIANG H-T L, et al Long-range indoor navigation with PRM-RL. IEEE Trans. on Robotics, 2020, 36 (4): 1115- 1134.
doi: 10.1109/TRO.2020.2975428 |
| 67 | PATEL U, KUMAR N, SATHYAMOORTHY A J, et al. Dynamically feasible deep reinforcement learning policy for robot navigation in dense mobile crowds. https://arxiv.org/abs/2010.14838. |
| 68 |
ROUSSEAS P, BECHLIOULIS C, KYRIAKOPOULOS K J Harmonic-based optimal motion planning in constrained workspaces using reinforcement learning. IEEE Robotics and Automation Letters, 2021, 6 (2): 2005- 2011.
doi: 10.1109/LRA.2021.3060711 |
| 69 |
CHANG L, SHAN L, JIANG C, et al Reinforcement based mobile robot path planning with improved dynamic window approach in unknown environment. Autonomous Robots, 2021, 45 (1): 51- 76.
doi: 10.1007/s10514-020-09947-4 |
| 70 | PEREZ-D'ARPINO C, LIU C, GOEBEL P, et al Robot navigation in constrained pedestrian environments using reinforcement learning. Proc. of the IEEE International Conference on Robotics and Automation, 2021, 1140- 1146. |
| 71 |
ICHTER B, PAVONE M Robot motion planning in learned latent spaces. IEEE Robotics and Automation Letters, 2019, 4 (3): 2407- 2414.
doi: 10.1109/LRA.2019.2901898 |
| 72 | QURESHI A H, SIMEONOV A, BENCY M J, et al Motion planning networks. Proc. of the IEEE International Conference on Robotics and Automation, 2019, 2118- 2124. |
| 73 | HE Z C, DONG L, SONG C W, et al. Multiagent soft actor-critic based hybrid motion planner for mobile robots. IEEE Trans. on Neural Networks and Learning Systems, 2022. DOI: 10.1109/TNNLS.2022.3172168. |
| 74 | EVERETT M, CHEN Y F, HOW J P. Motion planning among dynamic, decision-making agents with deep reinforcement learning. Proc. of the IEEE/RSJ International Conference on Intelligent Robots and Systems. 2018: 3052−3059. |
| 75 | WANG R E, EVERETT M, HOW J P. R-MADDPG for partially observable environments and limited communication. https://arxiv.org/abs/2002.06684. |
| 76 | ZHELO O, ZHANG J W, TAI L, et al. Curiosity-driven exploration for mapless navigation with deep reinforcement learning. https://arxiv.org/pdf/1804.00456. |
| 77 | MIROWSKI P, PASCANU R, VIOLA F, et al. Learning to navigate in complex environments. https://arxiv.org/pdf/1611.03673. |
| 78 | LONG P X, FAN T X, LIAO X Y, et al Towards optimally decentralized multi-robot collision avoidance via deep reinforcement learning. Proc. of the IEEE International Conference on Robotics and Automation, 2018, 6252- 6259. |
| 79 | PATHAK D, AGRAWAL P, EFROS A A, et al Curiosity-driven exploration by self-supervised prediction. Proc. of the International Conference on Machine Learning, 2017, 2778- 2787. |
| 80 | SHI H B, SHI L, XU M, et al End-to-end navigation strategy with deep reinforcement learning for mobile robots. IEEE Trans. on Industrial Informatics, 2019, 16 (4): 2393- 2402. |
| 81 |
WANG Y D, HE H B, SUN C Y Learning to navigate through complex dynamic environment with modular deep reinforcement learning. IEEE Trans. on Games, 2018, 10 (4): 400- 412.
doi: 10.1109/TG.2018.2849942 |
| 82 | WANG N, ZHANG D Y, WANG Y Learning to navigate for mobile robot with continual reinforcement learning. Proc. of the 39th Chinese Control Conference, 2020, 3701- 3706. |
| 83 | TAI L, PAOLO G, LIU M Virtual-to-real deep reinforcement learning: continuous control of mobile robots for maples navigation. Proc. of the IEEE/RSJ International Conference on Intelligent Robots and Systems, 2017, 31- 36. |
| 84 | ROHMER E, SINGH S P, FREESE M V-REP: a versatile and scalable robot simulation framework. Proc. of the IEEE/RSJ International Conference on Intelligent Robots and Systems, 2013, 1321- 1326. |
| 85 | XIE L H, WANG S, ROSA S, et al Learning with training wheels: speeding up training with a simple controller for deep reinforcement learning. Proc. of the IEEE International Conference on Robotics and Automation, 2018, 6276- 6283. |
| 86 |
LUONG M, PHAM C Incremental learning for autonomous navigation of mobile robots based on deep reinforcement learning. Journal of Intelligent & Robotic Systems, 2021, 101, 1.
doi: 10.1007/s10846-020-01262-5 |
| 87 | CUI Y X, ZHANG H D, WANG Y, et al Learning world transition model for socially aware robot navigation. Proc. of the IEEE International Conference on Robotics and Automation, 2021, 9262- 9268. |
| 88 | JIN J, NGUYEN N M, SAKIB N, et al Mapless navigation among dynamics with social-safety-awareness: a reinforcement learning approach from 2D laser scans. Proc. of the IEEE International Conference on Robotics and Automation, 2020, 6979- 6985. |
| 89 | ZHOU Y Y, LI S J, GARCKE J. R-SARL: crowd-aware navigation based deep reinforcement learning for nonholonomic robot in complex environments. https://arxiv.org/abs/2105.13409. |
| 90 | MIROWSKI P, GRIMES M K, MALINOWSKI M, et al. Learning to navigate in cities without a map. https://arxiv.org/abs/1804.00168. |
| 91 |
KULHANEK J, DERNER E, BABUSKA R Visual navigation in real-world indoor environments using end-to-end deep reinforcement learning. IEEE Robotics and Automation Letters, 2021, 6 (3): 4345- 4352.
doi: 10.1109/LRA.2021.3068106 |
| 92 | ZHU Y K, MOTTAGHI R, KOLVE E, et al Target-driven visual navigation in indoor scenes using deep reinforcement learning. Proc. of the IEEE International Conference on Robotics and Automation, 2017, 3357- 3364. |
| 93 | WU Y C, RAO Z H, ZHANG W, et al Exploring the task cooperation in multi-goal visual navigation. Proc. of the 28th International Joint Conference on Artificial Intelligence, 2019, 609- 615. |
| 94 |
LYU Y L, SHI Y M, ZHANG X G Improving target-driven visual navigation with attention on 3D spatial relationships. Neural Processing Letters, 2022, 54, 3979- 3998.
doi: 10.1007/s11063-022-10796-8 |
| 95 | LUO W H, SUN P, ZHONG F W, et al End-to-end active object tracking via reinforcement learning. Proc. of the International Conference on Machine Learning, 2018, 3286- 3295. |
| 96 |
LUO W H, SUN P, ZHONG F W, et al End-to-end active object tracking and its real-world deployment via reinforcement learning. IEEE Trans. on Pattern Analysis and Machine Intelligence, 2020, 42 (6): 1317- 1332.
doi: 10.1109/TPAMI.2019.2899570 |
| 97 |
TAMPUU A, MATIISEN T, KODELJA D, et al Multiagent cooperation and competition with deep reinforcement learning. Plos One, 2017, 12 (4): e0172395.
doi: 10.1371/journal.pone.0172395 |
| 98 | SIVANATHAN K, VINAYAGAM B K, SAMAK T, et al Decentralized motion planning for multi-robot navigation using deep reinforcement learning. Proc. of the 3rd International Conference on Intelligent Sustainable Systems, 2020, 709- 716. |
| 99 | RASHID T, SAMVELYAN M, SCHROEDER C, et al Qmix: monotonic value function factorization for deep multi-agent reinforcement learning. Proc. of the International Conference on Machine Learning, 2018, 4295- 4304. |
| 100 | LOWE R, WU Y, TAMAR A, et al Multi-agent actor-critic for mixed cooperative-competitive environments. Proc. of the 31st International Conference on Neural Information Processing Systems, 2017, 6382- 6393. |
| 101 |
FAN T X, LONG P X, LIU W X, et al Distributed multi-robot collision avoidance via deep reinforcement learning for navigation in complex scenarios. International Journal of Robotics Research, 2020, 39 (7): 856- 892.
doi: 10.1177/0278364920916531 |
| 102 | YU C, VELU A, VINITSKY E, et al. The surprising effectiveness of MAPPO in cooperative, multi-agent games. https://arxiv.org/abs/2103.01955. |
| 103 | CHEN Y F, LIU M, EVERETT M, et al Decentralized non-communicating multiagent collision avoidance with deep reinforcement learning. Proc. of the IEEE International Conference on Robotics and Automation, 2017, 285- 292. |
| 104 | CHEN Y F, EVERETT M, LIU M, et al Socially aware motion planning with deep reinforcement learning. Proc. of the IEEE/RSJ International Conference on Intelligent Robots and Systems, 2017, 1343- 1350. |
| 105 |
EVERETT M, CHEN Y F, HOW J P Collision avoidance in pedestrian-rich environments with deep reinforcement learning. IEEE Access, 2021, 9, 10357- 10377.
doi: 10.1109/ACCESS.2021.3050338 |
| 106 |
SEMNANI S H, LIU H, EVERETT M, et al Multi-agent motion planning for dense and dynamic environments via deep reinforcement learning. IEEE Robotics and Automation Letters, 2020, 5 (2): 3221- 3226.
doi: 10.1109/LRA.2020.2974695 |
| 107 |
SEMNANI S H, DE RUITER A H, LIU H H Force-based algorithm for motion planning of large agent. IEEE Trans. on Cybernetics, 2022, 52 (1): 654- 665.
doi: 10.1109/TCYB.2020.2994122 |
| 108 |
TANG S, THOMAS J, KUMAR V Hold or take optimal plan (hoop): a quadratic programming approach to multi-robot trajectory generation. The International Journal of Robotics Research, 2018, 37 (9): 1062- 1084.
doi: 10.1177/0278364917741532 |
| 109 | ZHAO W S, QUERALTA J P, WESTERLUND T Sim-to-real transfer in deep reinforcement learning for robotics: a survey. Proc. of the IEEE Symposium Series on Computational Intelligence, 2020, 737- 744. |
| 110 |
ZHANG J W, TAI L, YUN P, et al Vr-goggles for robots: real-to-sim domain adaptation for visual control. IEEE Robotics and Automation Letters, 2019, 4 (2): 1148- 1155.
doi: 10.1109/LRA.2019.2894216 |
| 111 | LUTJENS B, EVERETT M, HOW J P Safe reinforcement learning with model uncertainty estimates. Proc. of the IEEE International Conference on Robotics and Automation, 2019, 8662- 8668. |
| 112 | CHAFFRE T, MORAS J, CHAN-HON-TONG A, et al. Sim-to-real transfer with incremental environment complexity for reinforcement learning of depth-based robot navigation. https://arxiv.org/abs/2004.14684v1. |
| 113 | TRAORE R, CASELLES-DUPRE H, LESORT T, et al. Continual reinforcement learning deployed in real-life using policy distillation and sim2real transfer. https://arxiv.org/abs/1906.04452. |
| 114 | RUSU A A, VECERIK M, ROTHORL T, et al Sim-to-real robot learning from pixels with progressive nets. Proc. of the Conference on Robot Learning, 2017, 262- 270. |
| 115 | ZHU Y F, SCHWAB D, VELOSO M Learning primitive skills for mobile robots. Proc. of the IEEE International Conference on Robotics and Automation, 2019, 7597- 7603. |
| 116 | LIANG J, PATEL U, SATHYAMOORTHY A J, et al. Realtime collision avoidance for mobile robots in dense crowds using implicit multi-sensor fusion and deep reinforcement learning. https://arxiv.org/abs/2004.03089. |
| 117 | ANDRYCHOWICZ M, CROW D, RAY A, et al. Hindsight experience replay. Proc. of the 31st Conference on Neural Information Processing Systems, 2017: 5055−5065. |
| 118 | SUN Y S, CHENG J H, ZHANG G C, et al Mapless motion planning system for an autonomous underwater vehicle using policy gradient-based deep reinforcement learning. Journal of Intelligent & Robotic Systems, 2019, 96 (3/4): 591- 601. |
| 119 | NG A Y, HARADA D, RUSSELL S J Policy invariance under reward transformations: theory and application to reward shaping. Proc. of the International Conference on Machine Learning, 1999, 278- 287. |
| 120 | QIAO Z Q, SCHNEIDER J, DOLAN J M Behavior planning at urban intersections through hierarchical reinforcement learning. Proc. of the IEEE International Conference on Robotics and Automation, 2021, 2667- 2673. |
| 121 |
CHRISTEN S, JENDELE L, AKSAN E, et al Learning functionally decomposed hierarchies for continuous control tasks with path planning. IEEE Robotics and Automation Letters, 2021, 6 (2): 3623- 3630.
doi: 10.1109/LRA.2021.3060403 |
| 122 | CHI Z J, ZHU L, ZHOU F, et al. A collision-free path planning method using direct behavior cloning. Proc. of the International Conference on Intelligent Robotics and Applications, 2019: 529−540. |
| 123 |
YOU C X, LU J B, FILEV D, et al Advanced planning for autonomous vehicles using reinforcement learning and deep inverse reinforcement learning. Robotics and Autonomous Systems, 2019, 114, 1- 18.
doi: 10.1016/j.robot.2019.01.003 |
| 124 | ROSBACH S, JAMES V, GROSSJOHANN S, et al Driving with style: inverse reinforcement learning in general-purpose planning for automated driving. Proc. of the IEEE/RSJ International Conference on Intelligent Robots and Systems, 2019, 2658- 2665. |
| 125 | COBBE K, KLIMOV O, HESSE C, et al. Quantifying generalization in reinforcement learning. Proc. of the International Conference on Machine Learning, 2019: 1282−1289. |
| 126 | LASKIN M, LEE K, STOOKE A, et al. Reinforcement learning with augmented data. https://arxiv.org/abs/2004.14990. |
| 127 | LEE K, LEE K, SHIN J, et al. Network randomization: a simple technique for generalization in deep reinforcement learning. https://arxiv.org/abs/1910.05396. |
| 128 | SCHAUL T, QUAN J, ANTONOGLOU I, et al. Prioritized experience replay. https://arxiv.org/pdf/1511.05952.pdf. |
| 129 |
HU Z J, GAO X G, WAN K F, et al Relevant experience learning: a deep reinforcement learning method for UAV autonomous motion planning in complex unknown environments. Chinese Journal of Aeronautics, 2021, 34 (12): 187- 204.
doi: 10.1016/j.cja.2020.12.027 |
| 130 | HE Z C, DONG L, SUN C Y, et al Reinforcement learning based multi-robot formation control under separation bearing orientation scheme. Proc. of the Chinese Automation Congress, 2020, 3792- 3797. |
| 131 | LASKIN M, SRINIVAS A, ABBEEL P CURL: contrastive unsupervised representations for reinforcement learning. Proc. of the International Conference on Machine Learning, 2020, 5639- 5650. |
| 132 | KOSTRIKOV I, YARATS D, FERGUS R. Image augmentation is all you need: regularizing deep reinforcement learning from pixels. https://arxiv.org/abs/2004.13649. |
| 133 | SCHWARZER M, ANAND A, GOEL R, et al. Data-efficient reinforcement learning with self-predictive representations. https://arxiv.org/abs/2007.05929. |
| 134 | TRAUTMAN P, KRAUSE A Unfreezing the robot: navigation in dense, interacting crowds. Proc. of the IEEE/RSJ International Conference on Intelligent Robots and Systems, 2010, 797- 803. |
| 135 | FERRER G, GARRELL A, SANFELIU A Robot companion: a social-force based approach with human awareness navigation in crowded environments. Proc. of the IEEE/RSJ International Conference on Intelligent Robots and Systems, 2013, 1688- 1694. |
| 136 | FERRER G, SANFELIU A Behavior estimation for a complete framework for human motion prediction in crowded environments. Proc. of the IEEE International Conference on Robotics and Automation, 2014, 5940- 5945. |
| 137 | VAN DEN BERG J, LIN M, MANOCHA D Reciprocal velocity obstacles for real-time multi-agent navigation. Proc. of the IEEE International Conference on Robotics and Automation, 2008, 1928- 1935. |
| 138 | VAN DEN BERG J, GUY S J, LIN M, et al Reciprocal n-body collision avoidance. Robotics Research, 2011, 70, 3- 19. |
| 139 | PHILLIPS M, LIKHACHEV M Sipp: safe interval path planning for dynamic environments. Proc. of the IEEE International Conference on Robotics and Automation, 2011, 5628- 5635. |
| 140 | TAI L, ZHANG J W, LIU M, et al Socially compliant navigation through raw depth inputs with generative adversarial imitation learning. Proc. of the IEEE International Conference on Robotics and Automation, 2018, 1111- 1117. |
| 141 | CHEN C G, LIU Y J, KREISS S, et al Crowd-robot interaction: crowd-aware robot navigation with attention-based deep reinforcement learning. Proc. of the International Conference on Robotics and Automation, 2019, 6015- 6022. |
| 142 | XIE L H, MIAO Y S, WANG S, et al Learning with stochastic guidance for robot navigation. IEEE Trans. on Neural Networks and Learning Systems, 2020, 32 (1): 166- 176. |
| 143 |
LEIVA F, Ruiz-del SOLAR J Robust RL-based map-less local planning: using 2D point clouds as observations. IEEE Robotics and Automation Letters, 2020, 5 (4): 5787- 5794.
doi: 10.1109/LRA.2020.3010732 |
| 144 | ZHANG W, ZHANG Y F, LIU N. Enhancing the generalization performance and speed up training for DRL-based mapless navigation. https://arxiv.org/abs/2103.11686v1. |
| 145 |
KIRKPATRICK J, PASCANU R, RABINOWITZ N, et al Overcoming catastrophic forgetting in neural networks. Proc. of the National Academy of Sciences, 2017, 114 (13): 3521- 3526.
doi: 10.1073/pnas.1611835114 |
| 146 | SHIN H, LEE J K, KIM J, et al. Continual learning with deep generative replay.https://arxiv.org/abs/1705.08690. |
| 147 | MALLYA A, DAVIS D, LAZEBNIK S. Piggyback: adapting a single network to multiple tasks by learning to mask weights. Proc. of the European Conference on Computer Vision, 2018: 67−82. |
| 148 | FARAJTABAR M, AZIZAN N, MOTT A, et al. Orthogonal gradient descent for continual learning. Proc. of the International Conference on Artificial Intelligence and Statistics, 2020: 3762−3773. |
| [1] | Xiangyang LIN, Qinghua XING, Fuxian LIU. Choice of discount rate in reinforcement learning with long-delay rewards [J]. Journal of Systems Engineering and Electronics, 2022, 33(2): 381-392. |
| [2] | Wanping SONG, Zengqiang CHEN, Mingwei SUN, Qinglin SUN. Reinforcement learning based parameter optimization of active disturbance rejection control for autonomous underwater vehicle [J]. Journal of Systems Engineering and Electronics, 2022, 33(1): 170-179. |
| [3] | Xin ZENG, Yanwei ZHU, Leping YANG, Chengming ZHANG. A guidance method for coplanar orbital interception based on reinforcement learning [J]. Journal of Systems Engineering and Electronics, 2021, 32(4): 927-938. |
| [4] | Yandong LI, Ling ZHU, Yuan GUO. Observer-based multivariable fixed-time formation control of mobile robots [J]. Journal of Systems Engineering and Electronics, 2020, 31(2): 403-414. |
| [5] | Bo Zhou, Kun Qian, Xudong Ma, and Xianzhong Dai. Ellipsoidal bounding set-membership identification approach for robust fault diagnosis with application to mobile robots [J]. Systems Engineering and Electronics, 2017, 28(5): 986-995. |
| [6] | Peng Wang, Qibin Zhang, and Zonghai Chen. Feature extension and matching for mobile robot global localization [J]. Journal of Systems Engineering and Electronics, 2015, 26(4): 840-. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||