
Journal of Systems Engineering and Electronics ›› 2023, Vol. 34 ›› Issue (2): 460-468.doi: 10.23919/JSEE.2023.000050
• CONTROL THEORY AND APPLICATION • Previous Articles
Yukun YANG( ), Xiangdong LIU()
), Xiangdong LIU()
Received:2022-01-04
Online:2023-04-18
Published:2023-04-18
Contact:
Yukun YANG
E-mail:yukunyang20@gmail.com;xdliu@bit.edu.cn
About author:Yukun YANG, Xiangdong LIU. Relational graph location network for multi-view image localization[J]. Journal of Systems Engineering and Electronics, 2023, 34(2): 460-468.
Add to citation manager EndNote|Reference Manager|ProCite|BibTeX|RefWorks

Fig 1
Pipeline of RGLN"
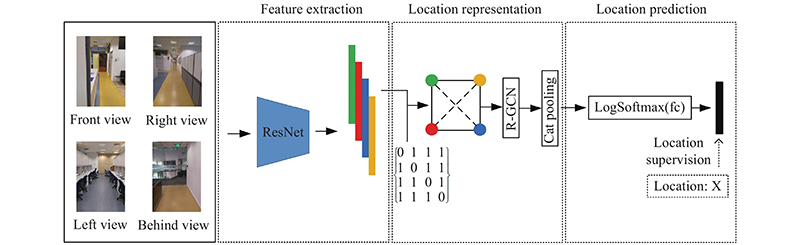
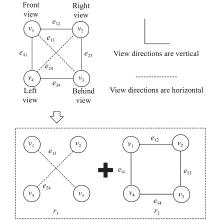
Fig 2
Location graph construction"
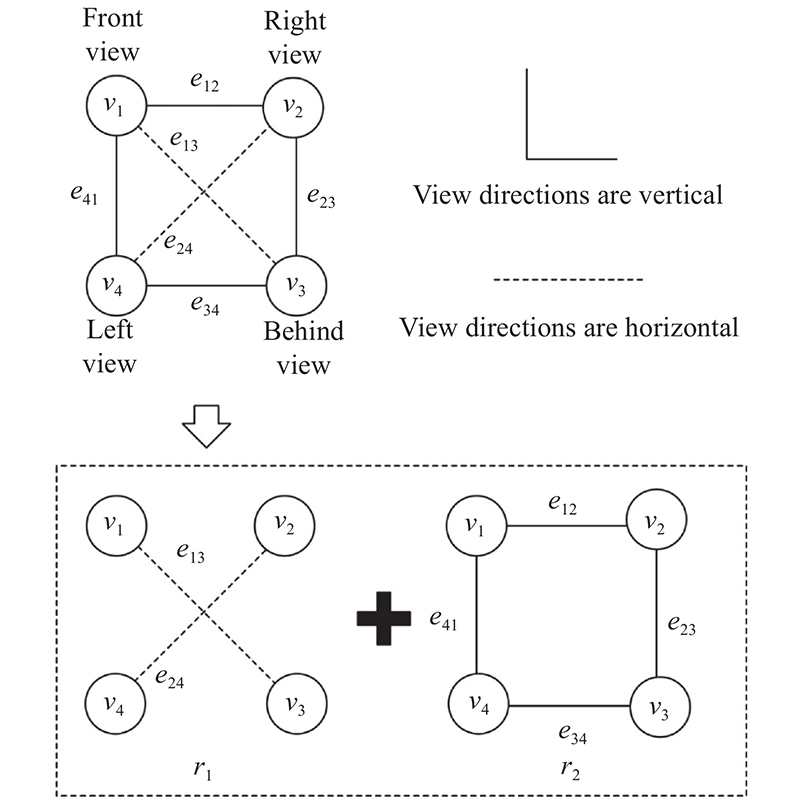
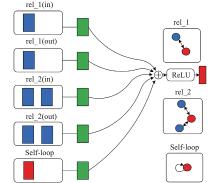
Fig 3
Node update process of R-GCN"
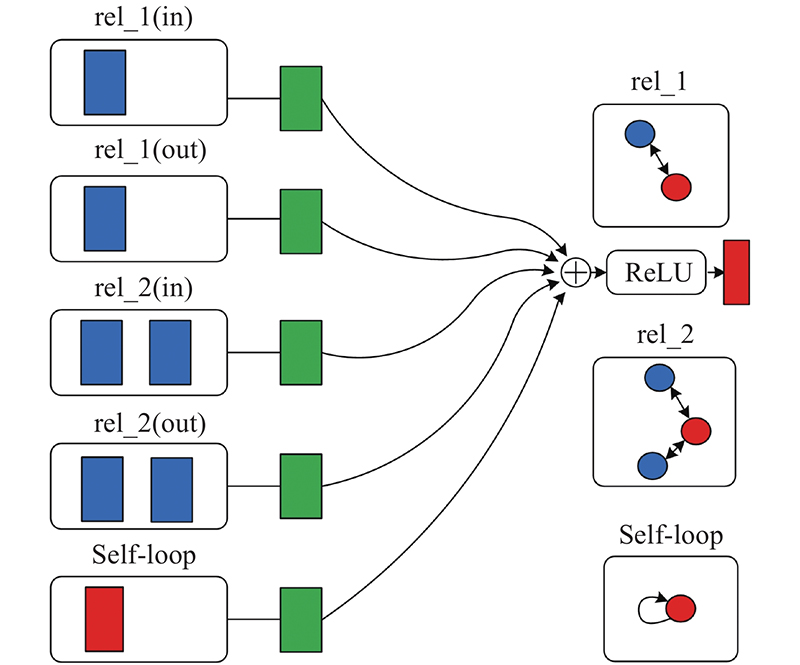
Fig 4
CDF@k (k=1,2,···,6) results on ICUBE dataset "
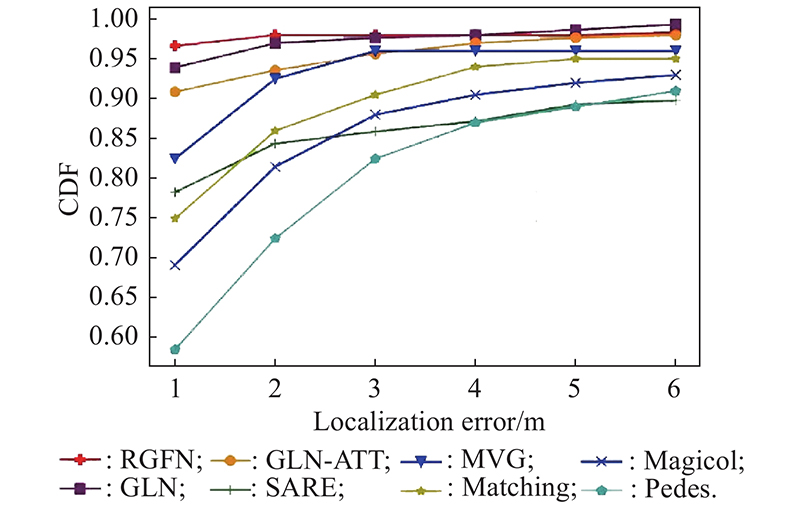
Table 1
Meter-level accuracy of RGLN and other compared methods on ICUBE, WCP, MALL-1 and MALL-2 dataset % "
| Dataset | Method | Meter-level accuracy |
| ICUBE | Pedes | 58.30 |
| Magicol | 69.20 | |
| Matching | 75.00 | |
| MVG | 82.50 | |
| SARE | 84.4 | |
| GLN | 93.92 | |
| GLN-ATT | 90.88 | |
| RGLN | 96.92 | |
| MALL-1 | Sextant | 47 |
| MALL-2 | GeoImage | 53 |
| WCP | SARE | 78.80 |
| GLN | 79.88 | |
| GLN-ATT | 79.88 | |
| RGLN | 80.49 |
Table 2
Results in terms of Recall@N and CDF@k on WCP training dataset "
| Method | Training Recall@N | Training CDF@k | |||||||||
| N=1 | N=2 | N=3 | N=5 | N=10 | k=1 | k=2 | k=3 | k=5 | k=10 | ||
| H+R-GCN | 0.997 | 0.998 | 1.000 | 1.000 | 1.000 | 1.000 | 1.000 | 1.000 | 1.000 | 1.000 | |
| I+GCN | 0.950 | 0.970 | 0.979 | 0.988 | 0.992 | 0.971 | 0.977 | 0.979 | 0.982 | 0.983 | |
| I+GAT | 0.966 | 0.980 | 0.985 | 0.989 | 0.995 | 0.980 | 0.983 | 0.985 | 0.988 | 0.988 | |
| I+GIN | 0.983 | 0.995 | 0.998 | 0.998 | 1.000 | 0.997 | 0.998 | 0.998 | 0.998 | 0.998 | |

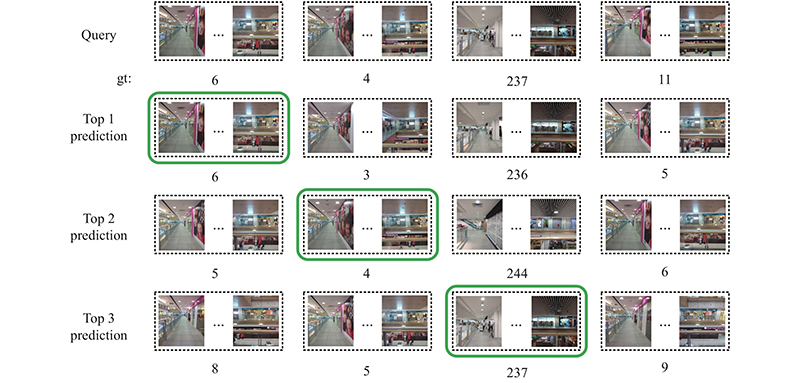
Fig 5
Qualitative results on ICUBE dataset"
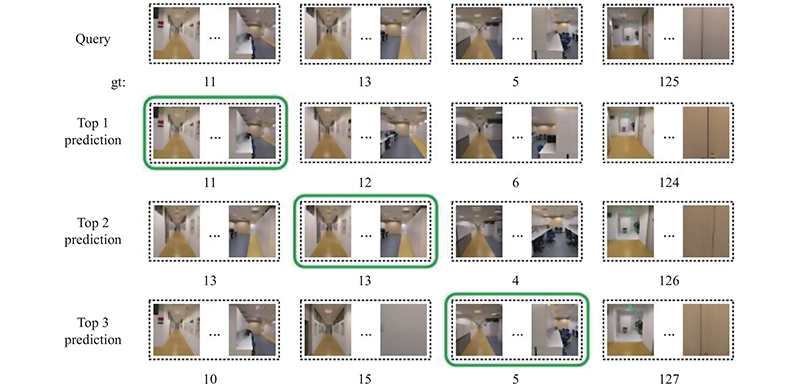

Fig 6
Qualitative results on WCP dataset"
| 1 | HU H J, WANG H S, LIU Z, et al Domain-invariant similarity activation map contrastive learning for retrieval-based long-term visual localization. IEEE/CAA Journal of Automatica Sinica, 2021, 9 (2): 313- 328. |
| 2 | ARANDJELOVIC R, GRONAT P, TORII A, et al. NetVLAD: CNN architecture for weakly supervised place recognition. Proc. of the IEEE Conference on Computer Vision and Pattern Recognition, 2016: 5297−5307. |
| 3 | CHENG W T, LIN W S, CHEN K, et al. Cascaded parallel filtering for memory-efficient image-based localization. Proc. of the IEEE/CVF International Conference on Computer Vision, 2019: 1032−1041. |
| 4 | CHIOU M J, LIU Z, YIN Y, et al Zero-shot multi-view indoor localization via graph location networks. Proc. of the 28th ACM International Conference on Multimedia, 2020, 3431- 3440. |
| 5 | MILFORD M J, WYETH G F SeqSLAM: visual routebased navigation for sunny summer days and stormy winter nights. Proc. of the IEEE International Conference on Robotics and Automation, 2012, 1643- 1649. |
| 6 | FACIL J M, OLID D, MONTESANO L, et al. Conditioninvariant multiview place recognition. https://arxiv.53yu.com/abs/1902.09516. |
| 7 | LIU Z G, CHENG L, LIU A A, et al Multiview and multimodal pervasive indoor localization. Proc. of the 25th ACM international Conference on Multimedia, 2017, 109- 117. |
| 8 | KIPF T N, WELLING M. Semi-supervised classification with graph convolutional networks. https://arxiv.org/abs/1609.02907. |
| 9 | VELICKOVIC P, CUCURULL G, CASANOVA A, et al. Graph attention networks. https://arxiv.org/abs/1710.10903. |
| 10 | SCHLICHTKRULL M, KIPF T N, BLOEM P, et al Modeling relational data with graph convolutional networks. Proc. of the European Semantic Web Conference, 2018, 593- 607. |
| 11 | ZHANG C X, SONG D J, HUANG C, et al Heterogeneous graph neural network. Proc. of the 25th ACM SIGKDD International Conference on Knowledge Discovery & Data Mining, 2019, 793- 803. |
| 12 | WANG X, JI H Y, SHI C, et al Heterogeneous graph attention network. Proc. of the World Wide Web Conference, 2019, 2022- 2032. |
| 13 | FAN S H, ZHU J X, HAN X T, et al Metapath-guided heterogeneous graph neural network for intent recommendation. Proc. of the 25th ACM SIGKDD International Conference on Knowledge Discovery & Data Mining, 2019, 2478- 2486. |
| 14 | LUO W J, ZHANG H, YANG X D, et al Dynamic heterogeneous graph neural network for real-time event prediction. Proc. of the 26th ACM SIGKDD International Conference on Knowledge Discovery & Data Mining, 2020, 3213- 3223. |
| 15 | ARANDJELOVIC R, GRONAT P, TORII A, et al. NetVLAD: CNN architecture for weakly supervised place recognition. Proc of the IEEE Conference on Computer Vision and Pattern Recognition, 2016: 5297−5307. |
| 16 | SARLIN P E, CADENA C, SIEGWART R, et al From coarse to fine: robust hierarchical localization at large scale. Proc. of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2019, 12716- 12725. |
| 17 | XU K Y L, HU W H, LESKOVEC J, et al. How powerful are graph neural networks? https://arxiv.org/abs/1810.00826. |
| 18 | GILMER J, SCHOENHOLZ S S, RILEY P F, et al Neural message passing for quantum chemistry. Proc. of the International Conference on International Conference on Machine Learning, 2017, 1263- 1272. |
| 19 | WANG X L, GIRSHICK R, GUPTA A, et al Non-local neural networks. Proc. of the IEEE Conference on Computer Vision and Pattern Recognition, 2018, 7794- 7803. |
| 20 | BATTAGLIA P W, HAMRICK J B, BAPST V, et al. Relational inductive biases, deep learning, and graph networks. https://arxiv.org/abs/1806.01261. |
| 21 |
WANG W T, TANG Z Y, CHEN Y C, et al Parity recognition of blade number and manoeuvre intention classification algorithm of rotor target based on micro-Doppler features using CNN. Journal of Systems Engineering and Electronics, 2020, 31 (5): 884- 889.
doi: 10.23919/JSEE.2020.000062 |
| 22 | SUN R, HUANG Q H, FANG W, et al Attributes-based person re-identification via CNNs with coupled clusters loss. Journal of Systems Engineering and Electronics, 2020, 31 (1): 45- 55. |
| 23 |
LIN L K, WANG S Y, TANG Z X Using deep learning to detect small targets in infrared oversampling images. Journal of Systems Engineering and Electronics, 2018, 29 (5): 947- 952.
doi: 10.21629/JSEE.2018.05.07 |
| 24 |
LI B Q, HU X H Effective distributed convolutional neural network architecture for remote sensing images target classification with a pre-training approach. Journal of Systems Engineering and Electronics, 2019, 30 (2): 238- 244.
doi: 10.21629/JSEE.2019.02.02 |
| 25 |
YE T, ZHAO Z Y, ZHANG J, et al Low-altitude small-sized object detection using lightweight feature-enhanced convolutional neural network. Journal of Systems Engineering and Electronics, 2021, 32 (4): 841- 853.
doi: 10.23919/JSEE.2021.000073 |
| 26 |
CHEN J B, WANG Z H, LI H Y Real-time object segmentation based on convolutional neural network with saliency optimization for picking. Journal of Systems Engineering and Electronics, 2018, 29 (6): 1300- 1307.
doi: 10.21629/JSEE.2018.06.17 |
| 27 |
ZHANG C S, WANG P Y, CHEN K, et al Identity-aware convolutional neural networks for facial expression recognition. Journal of Systems Engineering and Electronics, 2017, 28 (4): 784- 792.
doi: 10.21629/JSEE.2017.04.18 |
| 28 |
ZHAO B D, LU H Z, CHEN S F, et al Convolutional neural networks for time series classification. Journal of Systems Engineering and Electronics, 2017, 28 (1): 162- 169.
doi: 10.21629/JSEE.2017.01.18 |
| 29 |
LIN C, CHANG Q, LI X X Uplink NOMA signal transmission with convolutional neural networks approach. Journal of Systems Engineering and Electronics, 2020, 31 (5): 890- 898.
doi: 10.23919/JSEE.2020.000068 |
| 30 |
ZHAO B J, ZHAO B Y, TANG L B, et al Multi-scale object detection by top-down and bottom-up feature pyramid network. Journal of Systems Engineering and Electronics, 2019, 30 (1): 1- 12.
doi: 10.21629/JSEE.2019.01.01 |
| 31 |
KAUR H, KOUNDAL D, KADYAN V Image fusion techniques: a survey. Archives of Computational Methods in Engineering, 2021, 28 (7): 4425- 4447.
doi: 10.1007/s11831-021-09540-7 |
| 32 |
LECUN Y, BOTTOU L, BENGIO Y, et al Gradient-based learning applied to document recognition. Proceedings of the IEEE, 1998, 86 (11): 2278- 2324.
doi: 10.1109/5.726791 |
| 33 | KRIZHEVSKY A, SUTSKEVER I, HINTON G E Imagenet classification with deep convolutional neural networks. Advances in Neural Information Processing Systems, 2012, 25, 1097- 1105. |
| 34 | HE K M, ZHANG X Y, REN S Q, et al Deep residual learning for image recognition. Proc. of the IEEE Conference on Computer Vision and Pattern Recognition, 2016, 770- 778. |
| 35 | HE K M, ZHANG X Y, REN S Q, et al Identity mappings in deep residual networks. Proc. of the European Conference on Computer Vision, 2016, 630- 645. |
| 36 | SANDLER M, HOWARD A, ZHU M, et al Mobilenetv2: Inverted residuals and linear bottlenecks. Proc. of the IEEE Conference on Computer Vision and Pattern Recognition, 2018, 4510- 4520. |
| 37 | HOWARD A, SANDLER M, CHU G, et al Searching for mobilenetv3. Proc. of the IEEE/CVF International Conference on Computer Vision, 2019, 1314- 1324. |
| 38 |
HE C, XIA G S, SUN H SAR images classification method based on Dempster-Shafer theory and kernel estimate. Journal of Systems Engineering and Electronics, 2007, 18 (2): 210- 216.
doi: 10.1016/S1004-4132(07)60076-0 |
| 39 |
FENG L, WANG J, LIU S L, et al Multi-label dimensionality reduction and classification with extreme learning machines. Journal of Systems Engineering and Electronics, 2014, 25 (3): 502- 513.
doi: 10.1109/JSEE.2014.00058 |
| 40 | LI F, ZHAO C S, DING G Z, et al A reliable and accurate indoor localization method using phone inertial sensors. Proc. of the ACM Conference on Ubiquitous Computing, 2012, 421- 430. |
| 41 |
SHU Y C, BO C, SHEN G B, et al Magicol: indoor localization using pervasive magnetic field and opportunistic WiFi sensing. IEEE Journal on Selected Areas in Communications, 2015, 33 (7): 1443- 1457.
doi: 10.1109/JSAC.2015.2430274 |
| 42 | RAVI N, SHANKAR P, FRANKEL A, et al Indoor localization using camera phones. Proc. of the 7th IEEE Workshop on Mobile Computing Systems & Applications, 2005, 1- 7. |
| 43 | GAO R P, TIAN Y, YE F, et al Sextant: towards ubiquitous indoor localization service by photo-taking of the environment. IEEE Trans. on Mobile Computing, 2015, 15 (2): 460- 474. |
| 44 | LIANG J Z, CORSO N, TURNER E, et al Image based localization in indoor environments. Proc. of the 4th International Conference on Computing for Geospatial Research and Application, 2013, 70- 75. |
| 45 | LIU Z G, CHENG L, LIU A A, et al Multi-view and multimodal pervasive indoor localization. Proc. of the 25th ACM International Conference on Multimedia, 2017, 109- 117. |
| 46 | LIU L, LI H D, DAI Y C Stochastic attraction-repulsion embedding for large scale image localization. Proc. of the IEEE/CVF International Conference on Computer Vision, 2019, 2570- 2579. |
| No related articles found! |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||