
Journal of Systems Engineering and Electronics ›› 2023, Vol. 34 ›› Issue (2): 479-491.doi: 10.23919/JSEE.2023.000046
• CONTROL THEORY AND APPLICATION • Previous Articles
Yongshuai WANG1( ), Zengqiang CHEN1,2,*(), Mingwei SUN1(), Qinglin SUN1()
), Zengqiang CHEN1,2,*(), Mingwei SUN1(), Qinglin SUN1()
Received:2021-03-12
Online:2023-04-18
Published:2023-04-18
Contact:
Zengqiang CHEN
E-mail:541455366@qq.com;chenzq@nankai.edu.cn;smw_sunmingwei@163.com;sunql@nankai.edu.cn
About author:Supported by:Yongshuai WANG, Zengqiang CHEN, Mingwei SUN, Qinglin SUN. Design and analysis of active disturbance rejection control for time-delay systems using frequency-sweeping[J]. Journal of Systems Engineering and Electronics, 2023, 34(2): 479-491.
Add to citation manager EndNote|Reference Manager|ProCite|BibTeX|RefWorks

Fig 1
Relationship for two functions"
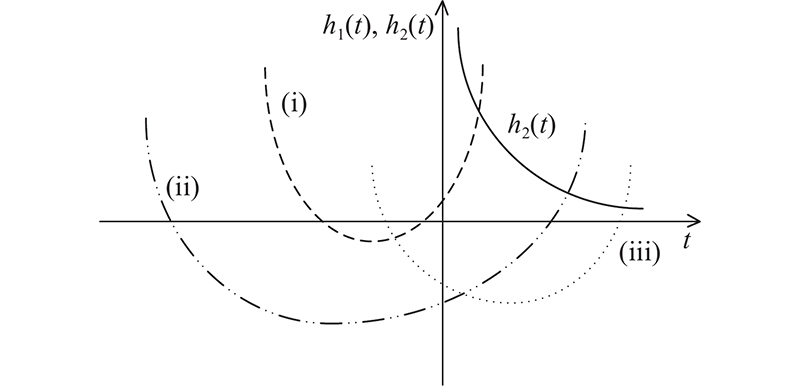
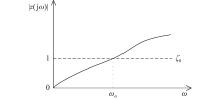
Fig 2
Approximation of curve $\left| {{\boldsymbol{z}}({\bf{j}}{\boldsymbol{\omega}} )} \right|$ "
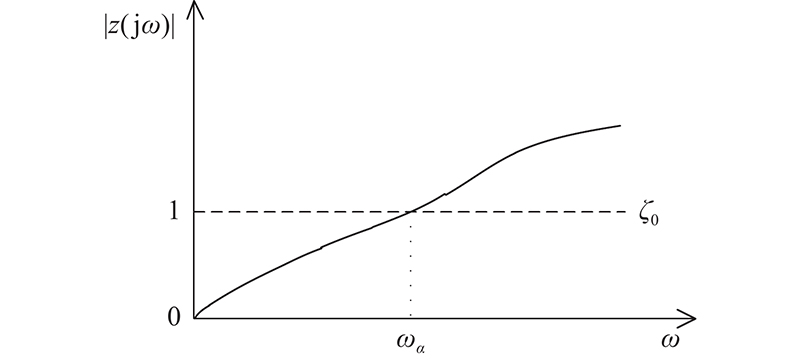

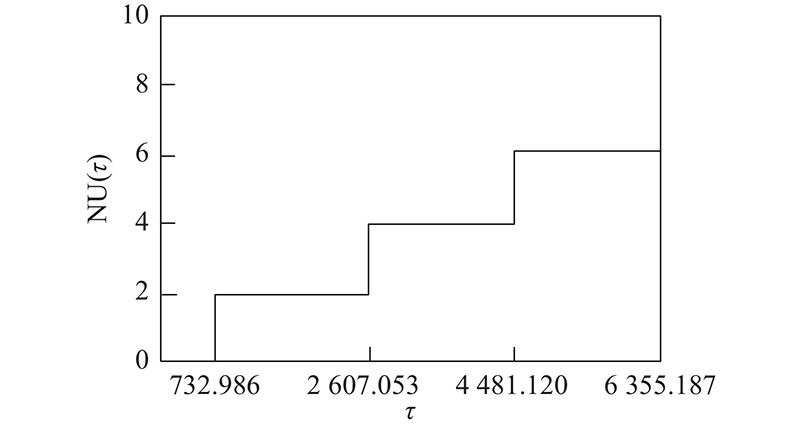
Fig 3
Unstable poles for different time-delays"
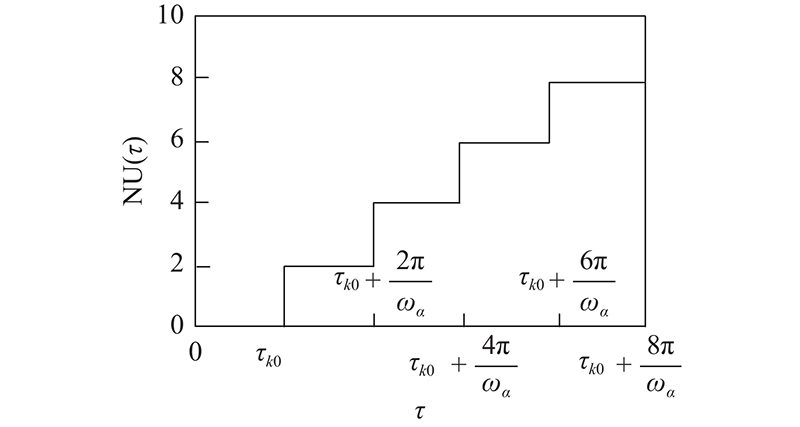
Fig 4
Feasible region when ${{\boldsymbol{\tau}} _{{\boldsymbol{k0}}}} = {\boldsymbol{5}}$ "
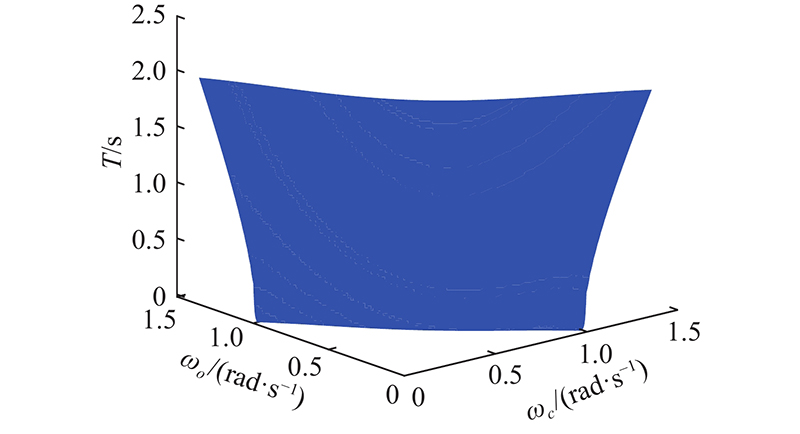
Fig 5
Feasible region when ${{\boldsymbol{\tau }}_{{\boldsymbol{k0}}}} = {\boldsymbol{30}}$ "
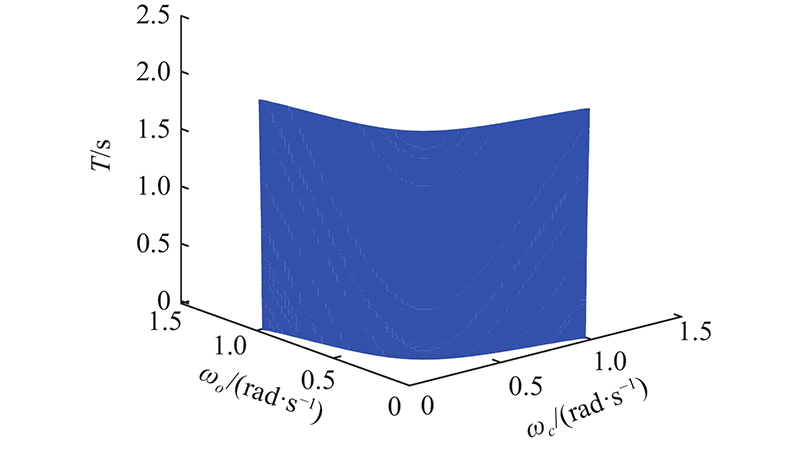

Fig 6
Critical time-delay for different control parameters"
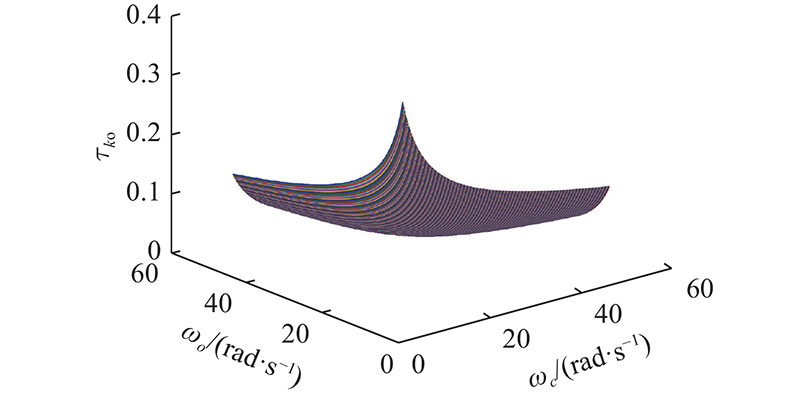
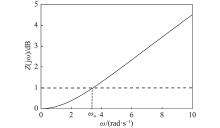
Fig 7
Frequency-sweeping curve"
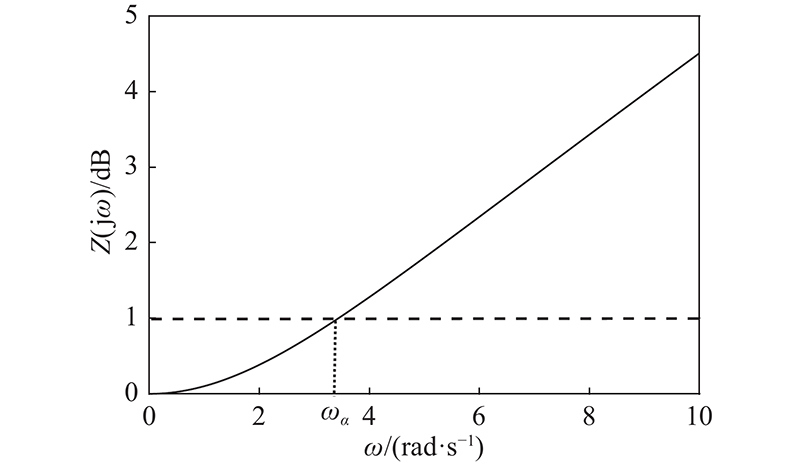
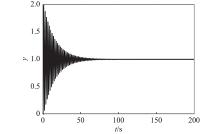
Fig 8
Step response when ${\boldsymbol{\tau}} = {\boldsymbol{0.18}}\;{ {s}}$ "
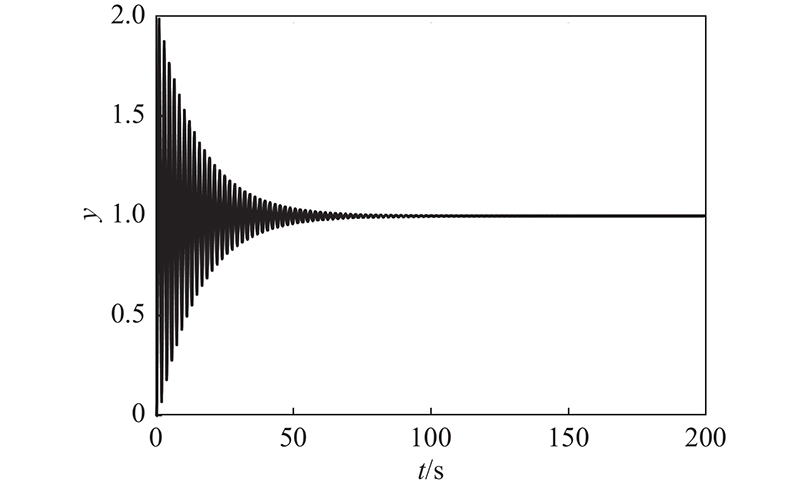
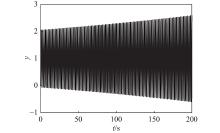
Fig 9
Step response when ${\boldsymbol{\tau}} = {\boldsymbol{0.19}}\;{ {s}}$ "
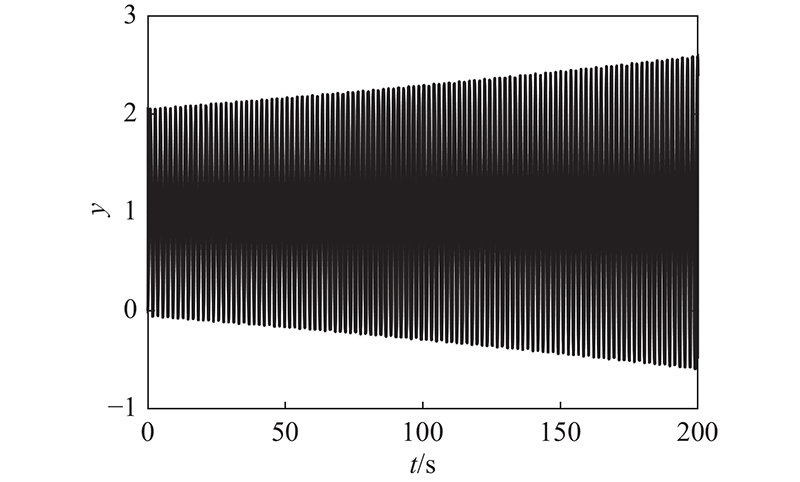
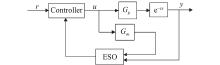
Fig 10
TDS-LADRC structure for systems with time-delay"
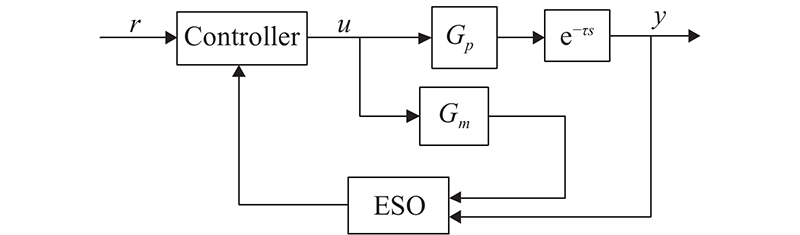

Fig 11
Simplified diagram of TDS- LADRC systems"
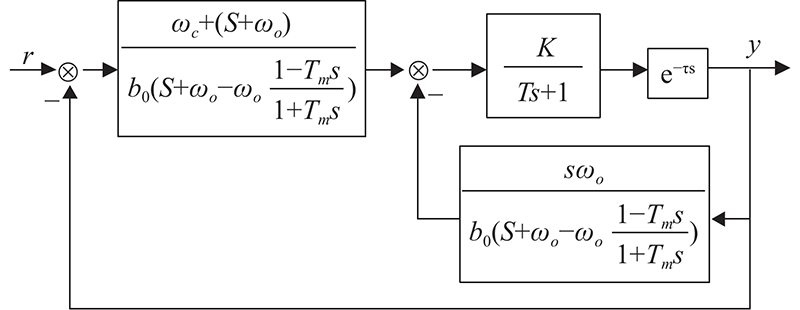
Fig 12
Maximal time-delay for different ${{\boldsymbol{T}}_{\boldsymbol{m}}}$ "
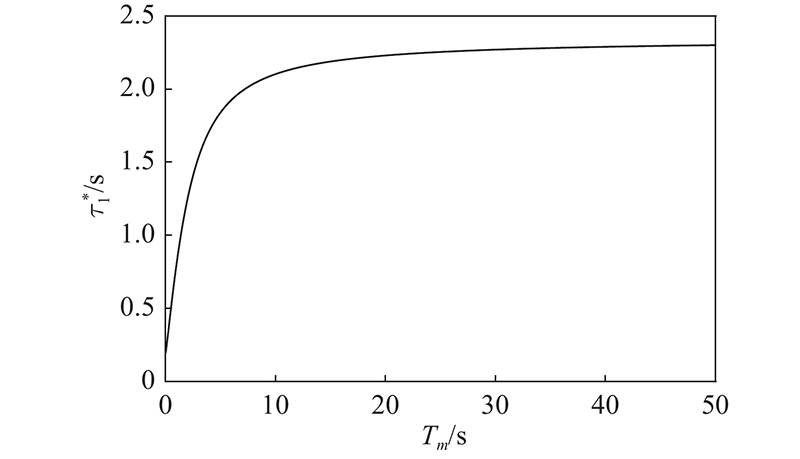
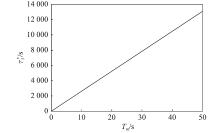
Fig 13
Maximal time-delay of Theorem 3 for different ${{\boldsymbol{T}}_{\boldsymbol{m}}}$ "
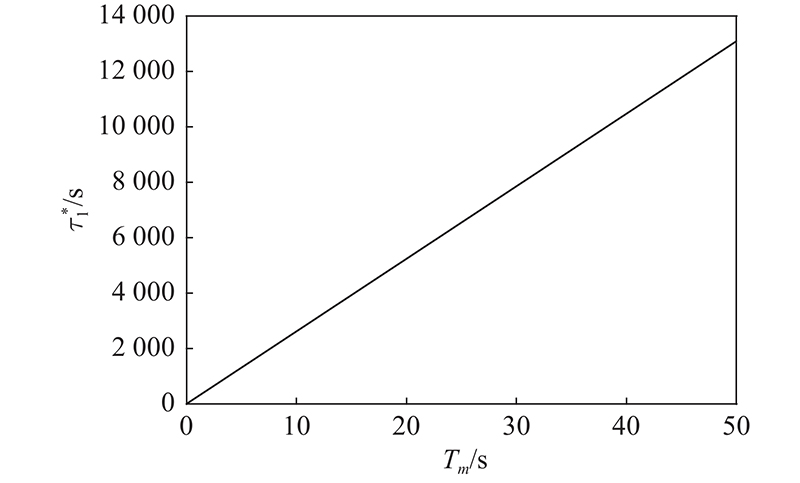
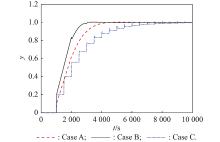
Fig 14
Step response for Case A, Case B and Case C"
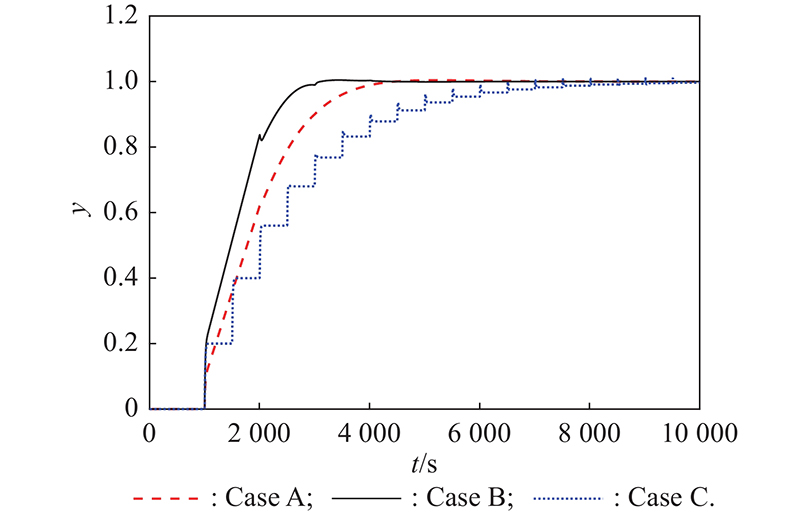
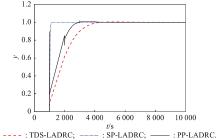
Fig 15
Step response for TDS-LADRC, SP-LADRC and PP-LADRC"
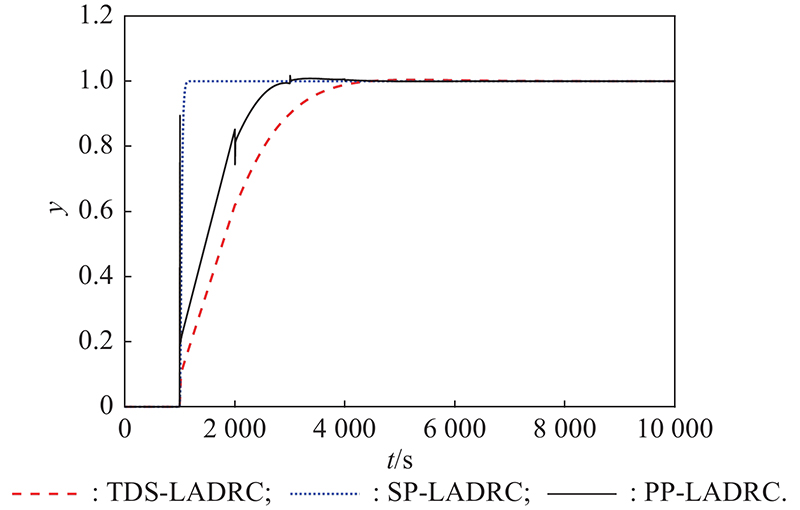
Table 1
Comparison for TDS-LADRC, SP-LADRC and PP-LADRC"
| Method | Control parameter | Model-based |
| TDS-LADRC | | No |
| SP-LADRC | | Yes |
| PP-LADRC | | No |

Fig 16
Robust test for TDS-LADRC and SP-LADRC"
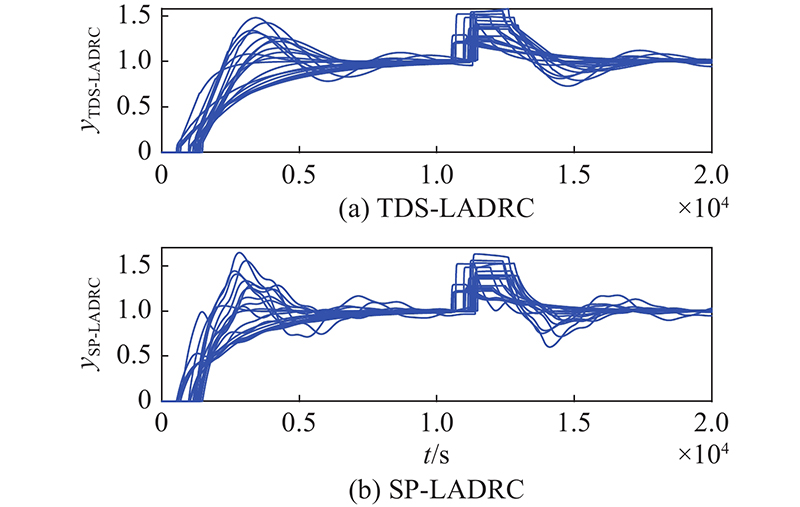
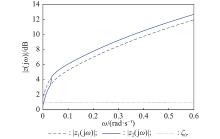
Fig 17
Frequency-sweeping curves of SP-LADRC"
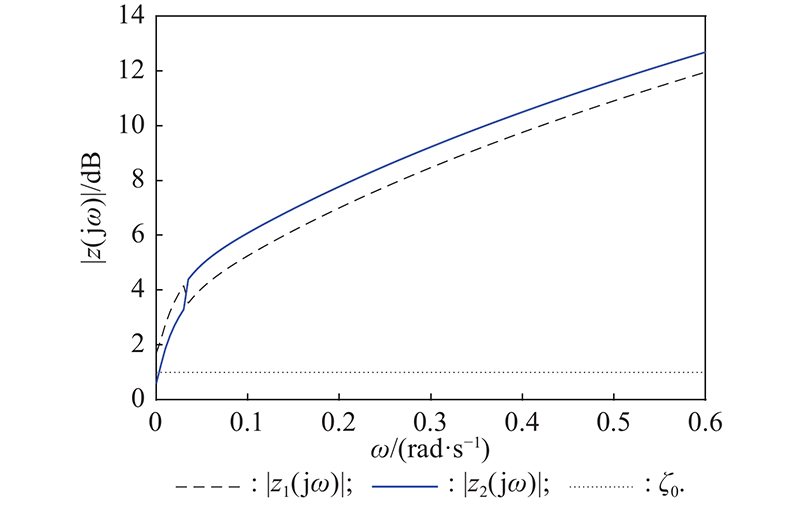
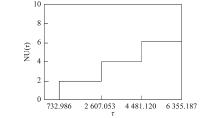
Fig 18
Unstable poles of SP-LADRC"
| 1 |
HAN J Q From PID to active disturbance rejection control. IEEE Trans. on Industrial Electronics, 2009, 56 (3): 900- 906.
doi: 10.1109/TIE.2008.2011621 |
| 2 |
SU J Y, CHEN W H, YANG J On relationship between time-domain and frequency-domain disturbance observers and its applications. Journal of Dynamic Systems Measurement and Control, 2016, 138 (9): 091013.
doi: 10.1115/1.4033631 |
| 3 |
CHEN W H, YANG J, GUO L, et al Disturbance-observer-based control and related methods— an overview. IEEE Trans. on Industrial Electronics, 2016, 63 (2): 1083- 1095.
doi: 10.1109/TIE.2015.2478397 |
| 4 | GAO Z Q Scaling and bandwidth parameterization based controller tuning. Proc. of the American Control Conference, 2003, 4989- 4996. |
| 5 |
XUE W C, HUANG Y Performance analysis of 2-DOF tracking control for a class of nonlinear uncertain systems with discontinuous disturbances. International Journal of Robust and Nonlinear Control, 2018, 28 (4): 1456- 1473.
doi: 10.1002/rnc.3972 |
| 6 |
AHMAD S, ALI A Unified disturbance-estimation-based control and equivalence with IMC and PID: case study on a DC-DC boost converter. IEEE Trans. on Industrial Electronics, 2021, 68 (6): 5122- 5132.
doi: 10.1109/TIE.2020.2987269 |
| 7 |
WANG Y S, LIU J J, CHEN Z Q, et al On the stability and convergence rate analysis for the nonlinear uncertain systems based upon active disturbance rejection control. International Journal of Robust and Nonlinear Control, 2020, 30 (14): 5728- 5750.
doi: 10.1002/rnc.5103 |
| 8 |
LIU J J, SUN M W, CHEN Z Q, et al High AOA decoupling control for aircraft based on ADRC. Journal of Systems Engineering and Electronics, 2020, 31 (2): 393- 402.
doi: 10.23919/JSEE.2020.000016 |
| 9 | HAN J Q, ZHANG W G ADRC control for large time-delay systems. Control & Decision, 1999, 14 (4): 354- 358. |
| 10 |
ZHAO S, GAO Z Q Modified active disturbance rejection control for time-delay systems. ISA Transactions, 2014, 53 (4): 882- 888.
doi: 10.1016/j.isatra.2013.09.013 |
| 11 | ZHENG Q, GAO Z Q On active disturbance rejection for systems with input time-delays and unknown dynamics. Proc. of American Control Conference, 2016, 95- 100. |
| 12 |
ZHANG D Y, YAO X L, WU Q H, et al ADRC based control for a class of input time delay systems. Journal of Systems Engineering and Electronics, 2017, 28 (6): 1210- 1220.
doi: 10.21629/JSEE.2017.06.19 |
| 13 |
LI P, WANG L, ZHU G L, et al Predictive active disturbance rejection control for servo systems with communication delays via sliding mode approach. IEEE Trans. on Industrial Electronics, 2021, 68 (12): 12679- 12688.
doi: 10.1109/TIE.2020.3039203 |
| 14 |
ZHANG B W, TAN W, LI J Tuning of Smith predictor based generalized ADRC for time-delayed processes via IMC. ISA Transactions, 2020, 99, 159- 166.
doi: 10.1016/j.isatra.2019.11.002 |
| 15 |
LI S Q, ZHU C W, MAO Q B, et al Active disturbance rejection vibration control for an all-clamped piezoelectric plate with delay. Control Engineering Practice, 2021, 108, 104719.
doi: 10.1016/j.conengprac.2020.104719 |
| 16 |
FU C F, TAN W Control of unstable processes with time delays via ADRC. ISA Transactions, 2017, 71, 530- 541.
doi: 10.1016/j.isatra.2017.09.002 |
| 17 |
WANG Y T, TAN W, CUI W Q, et al Linear active disturbance rejection control for oscillatory systems with large time-delays. Journal of the Franklin Institute, 2021, 358 (12): 6240- 6260.
doi: 10.1016/j.jfranklin.2021.06.016 |
| 18 | DENG W X, YAO J Y, MA D Time-varying input delay compensation for nonlinear systems with additive disturbance: an output feedback approach. International Journal of Robust and Nonlinear Control, 2018, 28 (4): 31- 52. |
| 19 | CHEN Z, HAO Y S, SU Z G, et al. Data-driven iterative tuning based active disturbance rejection control for FOPTD model. ISA Transactions, 2022, 128: 593−605. |
| 20 |
SRIKANTH M V, YADAIAH N Optimal parameter tuning of modified active disturbance rejection control for unstable time-delay systems using an AHP combined multi-objective quasi-oppositional Jaya algorithm. Applied Soft Computing, 2020, 86, 105881.
doi: 10.1016/j.asoc.2019.105881 |
| 21 | YANG R G, SUN M W, CHEN Z Q Graphical design for stability of linear active disturbance rejection control to first order time delay plants. International Journal of System Control & Information Processing, 2012, 1 (1): 118- 130. |
| 22 |
SUN L, XUE W C, LI D H, et al Quantitative tuning of active disturbance rejection controller for FOPTD model with application to power plant control. IEEE Trans. on Industrial Electronics, 2022, 69 (1): 805- 815.
doi: 10.1109/TIE.2021.3050372 |
| 23 | LI X G, NICULESCU S I, CELA A, et al On $\tau $ -decomposition frequency-sweeping test for a class of time-delay systems . Proc. of the 10th IFAC Workshop on Time Delay Systems, 2012, 132- 137. |
| 24 |
OLGAC N, SIPAHI R An exact method for the stability analysis of time-delayed linear time-invariant (LTI) systems. IEEE Trans. on Automatic Control, 2002, 47 (5): 793- 797.
doi: 10.1109/TAC.2002.1000275 |
| 25 |
HERTZ D, JURY E I, ZEHEB E Simplified analytic stability test for systems with commensurate time delays. IEEE Proceedings D —Control Theory and Applications, 1984, 131 (1): 52- 56.
doi: 10.1049/ip-d.1984.0008 |
| 26 | NORMEYRICO J E, CAMACHO E F. Control of dead-time processes. London: Springer, 2007. |
| 27 |
CHEN S, XUE W C, ZHONG S, et al On comparison of modified ADRCs for nonlinear uncertain systems with time delay. Science China Information Sciences, 2018, 61 (7): 070223.
doi: 10.1007/s11432-017-9403-x |
| 28 | XUE W C, LIU P, CHEN S, et al On extended state predictor observer based active disturbance rejection control for uncertain systems with sensor delay. Proc. of the 16th International Conference on Control, 2016, 1267- 1271. |
| [1] | Wanping SONG, Zengqiang CHEN, Mingwei SUN, Qinglin SUN. Reinforcement learning based parameter optimization of active disturbance rejection control for autonomous underwater vehicle [J]. Journal of Systems Engineering and Electronics, 2022, 33(1): 170-179. |
| [2] | Hui WAN, Xiaohui QI, Jie LI. Stability analysis of linear/nonlinear switching active disturbance rejection control based MIMO continuous systems [J]. Journal of Systems Engineering and Electronics, 2021, 32(4): 956-970. |
| [3] | Junjie LIU, Mingwei SUN, Zengqiang CHEN, Qinglin SUN. High AOA decoupling control for aircraft based on ADRC [J]. Journal of Systems Engineering and Electronics, 2020, 31(2): 393-402. |
| [4] | Yueyue Ma, Jie Guo, and Shengjing Tang. BTT autopilot design for agile missiles with aerodynamic uncertainty [J]. Journal of Systems Engineering and Electronics, 2015, 26(4): 802-. |
| [5] | Yanbo Yuan and Ke Zhang. Design of a robust guidance law via active disturbance rejection control [J]. Journal of Systems Engineering and Electronics, 2015, 26(2): 353-358. |
| [6] | Ruiguang Yang, Mingwei Sun, and Zengqiang Chen. Active disturbance rejection control on first-order plant [J]. Journal of Systems Engineering and Electronics, 2011, 22(1): 95-102. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||