
Journal of Systems Engineering and Electronics ›› 2023, Vol. 34 ›› Issue (5): 1294-1308.doi: 10.23919/JSEE.2023.000079
• Control Theory and Application • Previous Articles Next Articles
Dongdong YAO1( ), Xiaofang WANG1,*(), Hai LIN1(), Zhuping WANG2()
), Xiaofang WANG1,*(), Hai LIN1(), Zhuping WANG2()
Received:2021-12-27
Online:2023-10-18
Published:2023-10-30
Contact:
Xiaofang WANG
E-mail:3120205027@bit.edu.cn;wangxf@bit.edu.cn;flight@bit.edu.cn;2799410606@qq.com
About author:Supported by:Dongdong YAO, Xiaofang WANG, Hai LIN, Zhuping WANG. Leader trajectory planning method considering constraints of formation controller[J]. Journal of Systems Engineering and Electronics, 2023, 34(5): 1294-1308.
Fig 1
Changing UAV formation for passing through a narrow area"

Fig 2
Relative motion relationship between leader and follower"
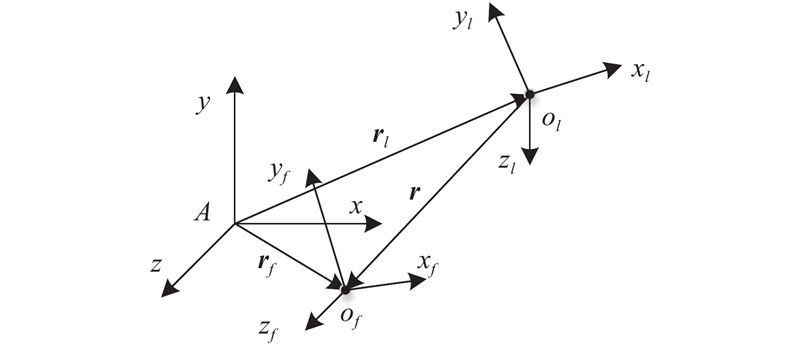
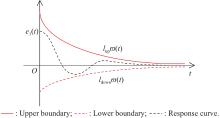
Fig 3
Relationship between formation error and performance function"
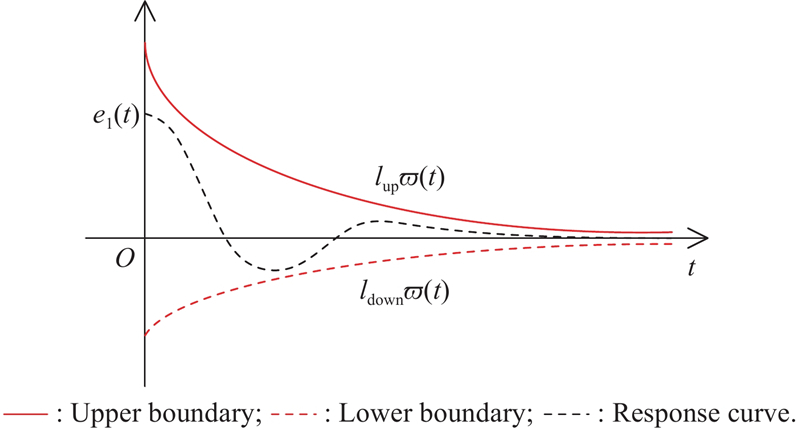
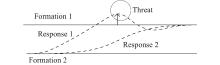
Fig 4
Safety judgment of formation change process"
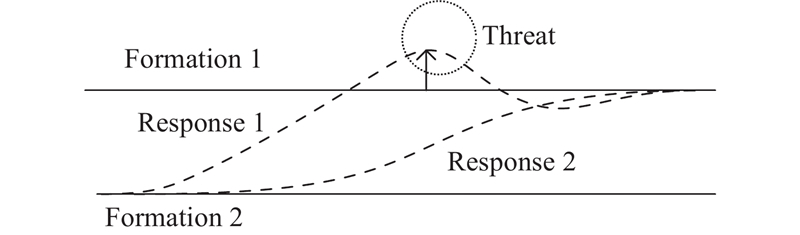

Fig 5
Turning angle constraint"
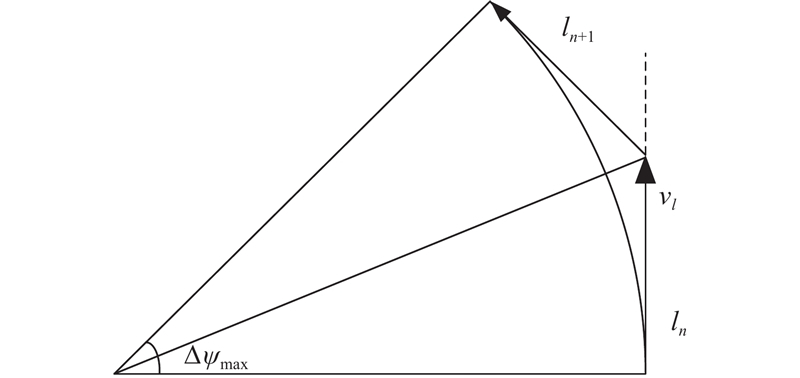
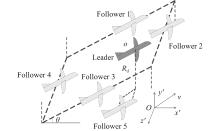
Fig 6
Diagram of formation boundary"
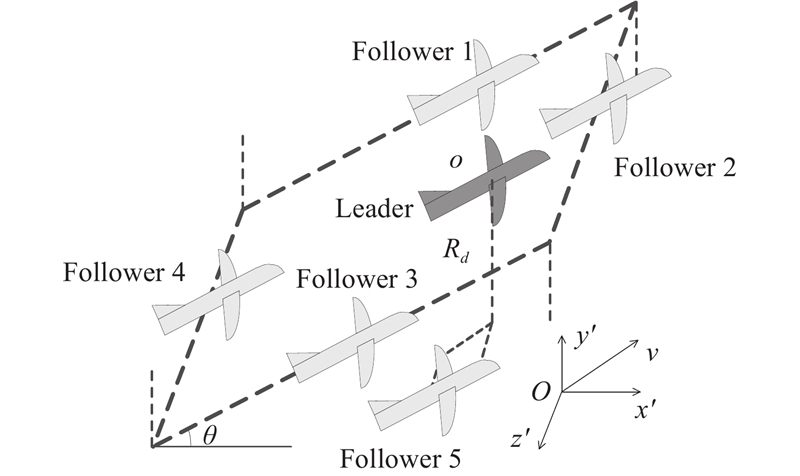
Fig 7
Formation configuration space position"
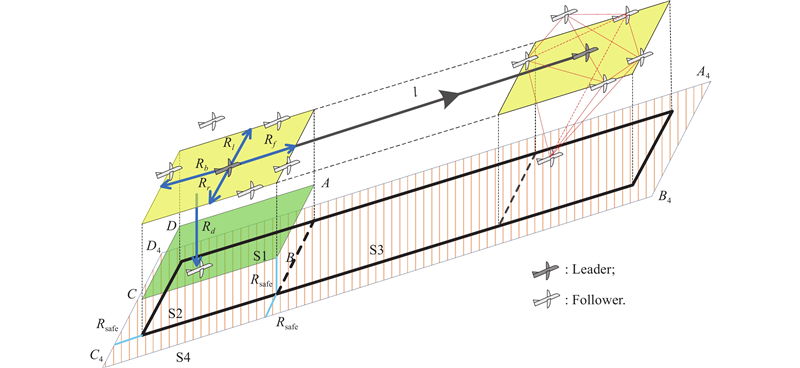
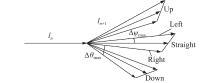
Fig 8
Schematic diagram of algorithm space search"
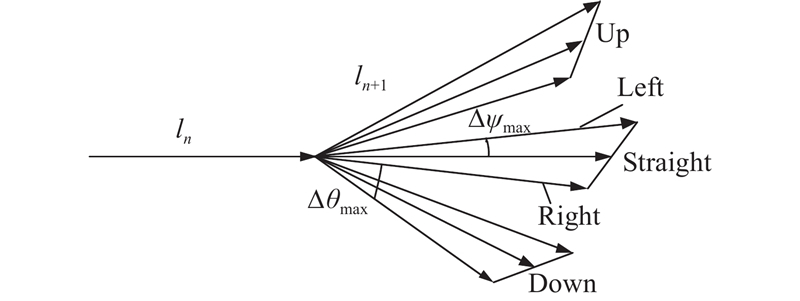

Fig 9
Schematic diagram of trajectory segment for formation transformation"
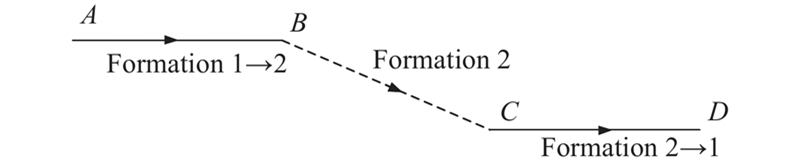
Table 1
Map parameters m "
| Type | x | z | Height | Radius |
| Peak | 700 | 700 | 300 | (300,300) |
| 1500 | 300 | 350 | (350,350) | |
| 300 | 600 | 310 | (310,330) | |
| 1600 | 1300 | 300 | (300,300) | |
| 1500 | 1500 | 250 | (250,250) | |
| 400 | 1800 | 260 | (260,260) | |
| 450 | 1500 | 400 | (400,200) | |
| Cylinder | 1100 | 900 | 600 | 100 |
| 900 | 1100 | 600 | 100 | |
| 1300 | 600 | 600 | 250 | |
| 750 | 1300 | 600 | 150 |
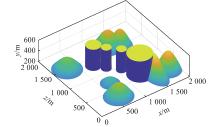
Fig 10
Schematic diagram of map"
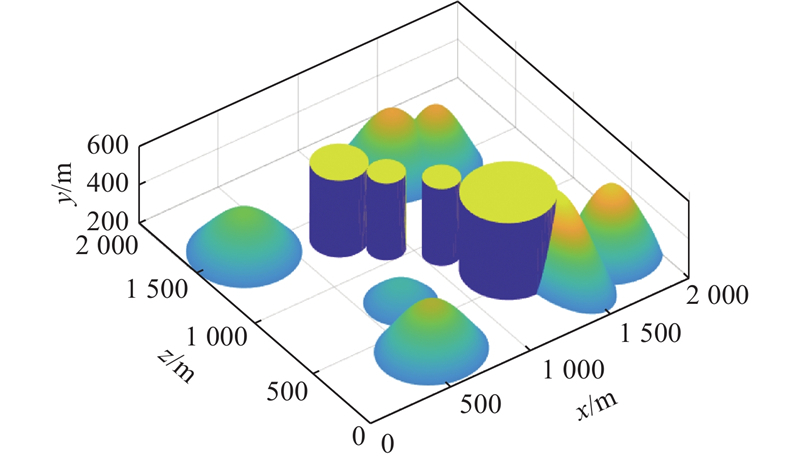
Table 2
Relative position of followers in two formations m "
| Follower | Formation 1 | Formation 2 | |||||
| | | | | | | ||
| 1 | 50 | 0 | 0 | 30 | 0 | 0 | |
| 2 | −50 | 0 | 0 | −30 | 0 | 0 | |
| 3 | 0 | 50 | 0 | 0 | 30 | 0 | |
| 4 | 0 | −50 | 0 | 0 | −30 | 0 | |
| 5 | 0 | 0 | 50 | 0 | 0 | 30 | |
| 6 | 0 | 0 | −50 | 0 | 0 | −30 | |
Fig 11
Trajectory of formation"
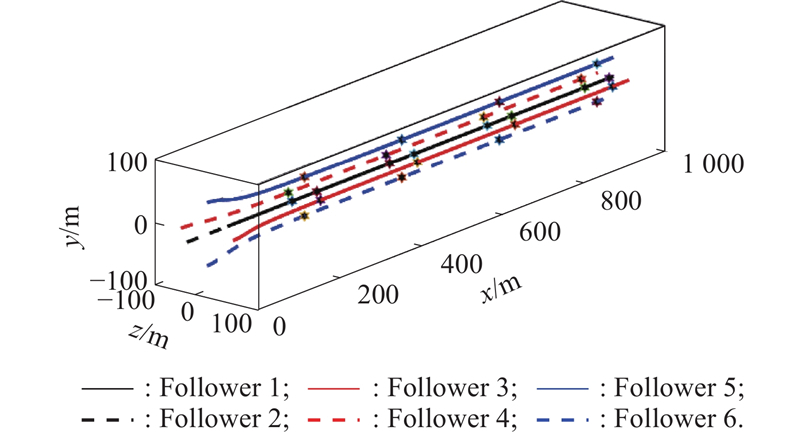
Fig 12
Simulation result of ${{\boldsymbol{e}}_{\boldsymbol{x}}}$ "
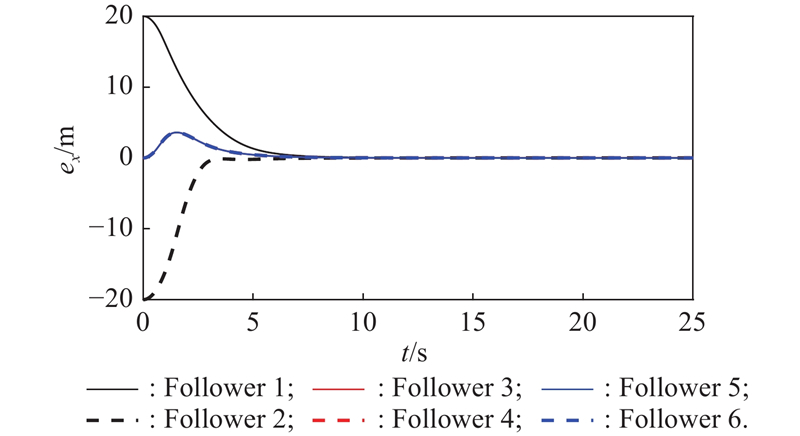
Fig 13
Simulation result of ${{\boldsymbol{e}}_{\boldsymbol{y}}}$ "
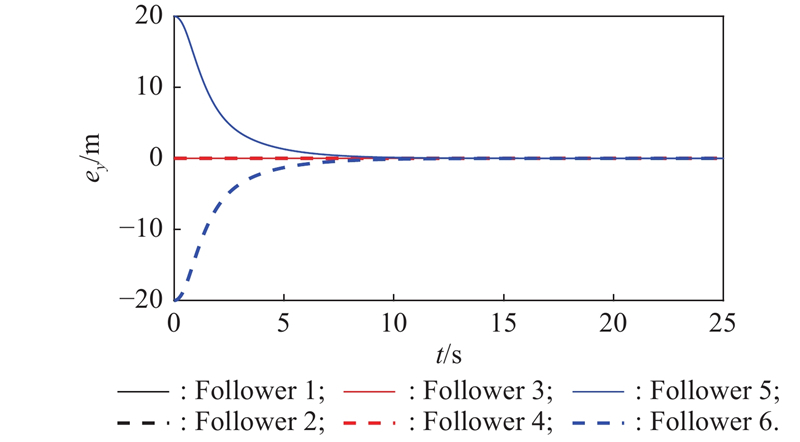
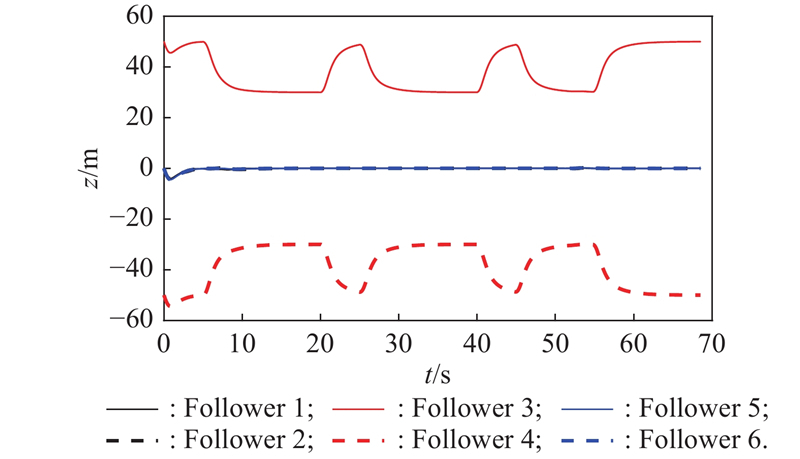
Fig 14
Simulation result of ${{\boldsymbol{e}}_{\boldsymbol{z}}}$ "
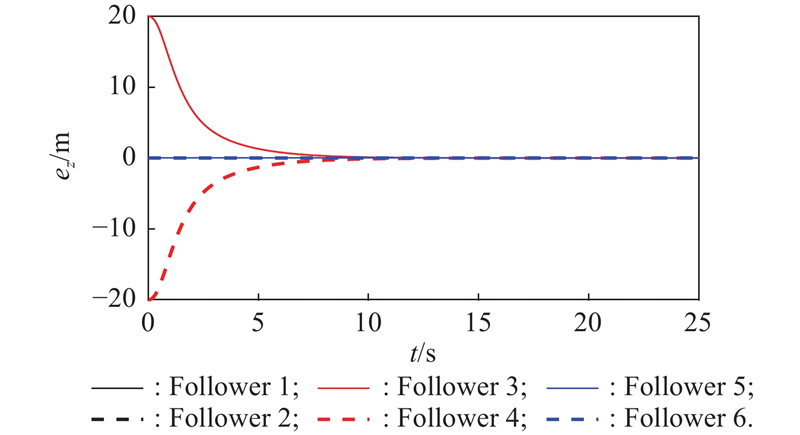
Fig 15
Simulation result of v "
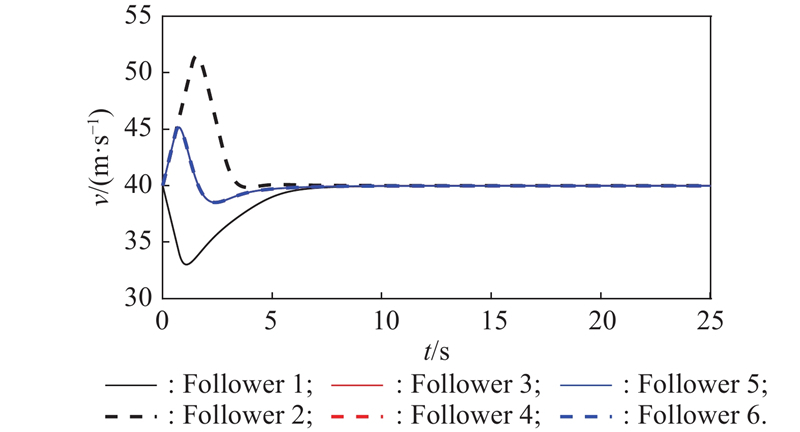
Fig 16
Simulation result of ${\boldsymbol{\theta}}$ "
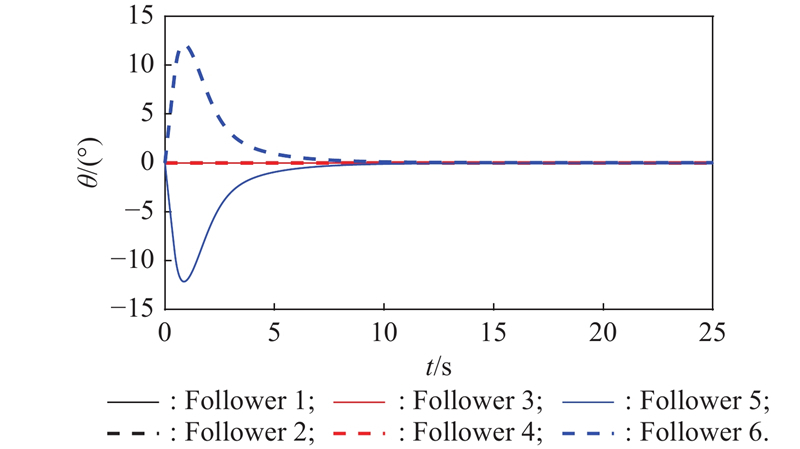
Fig 17
Simulation result of ${{\boldsymbol{\psi}} _{\boldsymbol{v}}}$ "
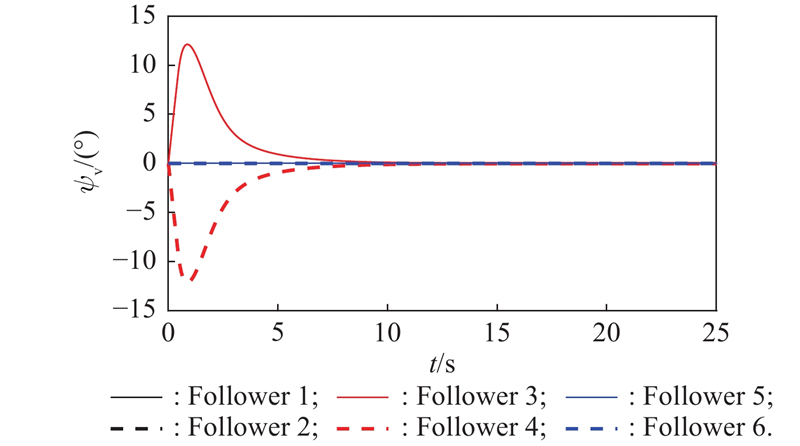
Fig 18
Simulation result of ${{\boldsymbol{a}}_{\boldsymbol{x}}}$ "
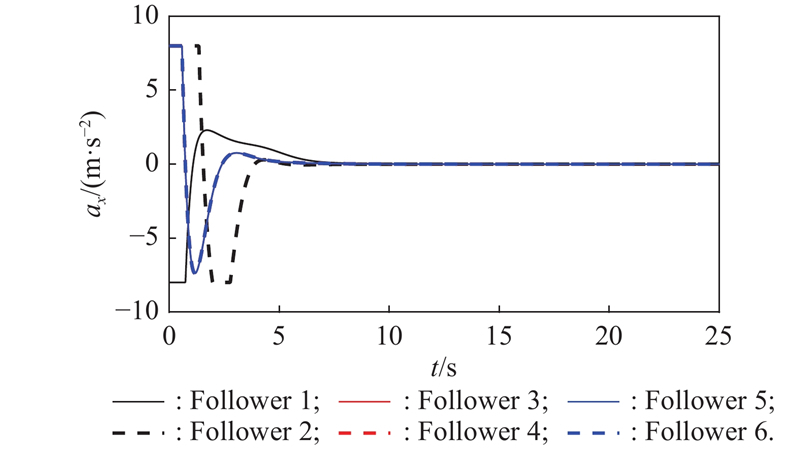
Fig 19
Simulation result of ${{\boldsymbol{a}}_{\boldsymbol{y}}}$ "
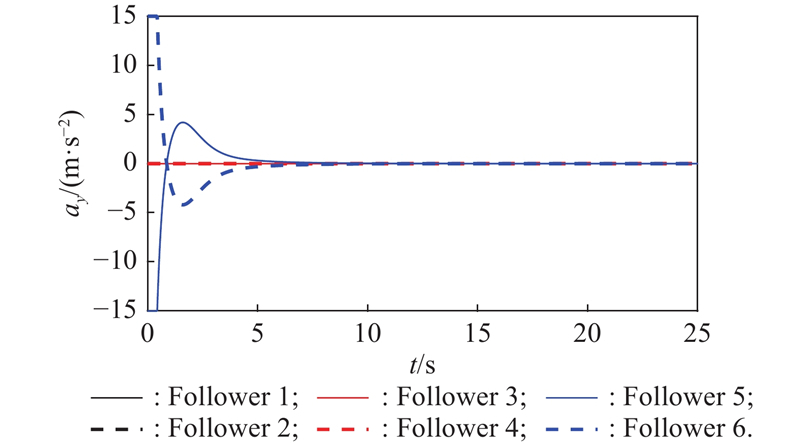
Fig 20
Simulation result of ${{\boldsymbol{a}}_{\boldsymbol{z}}}$ "
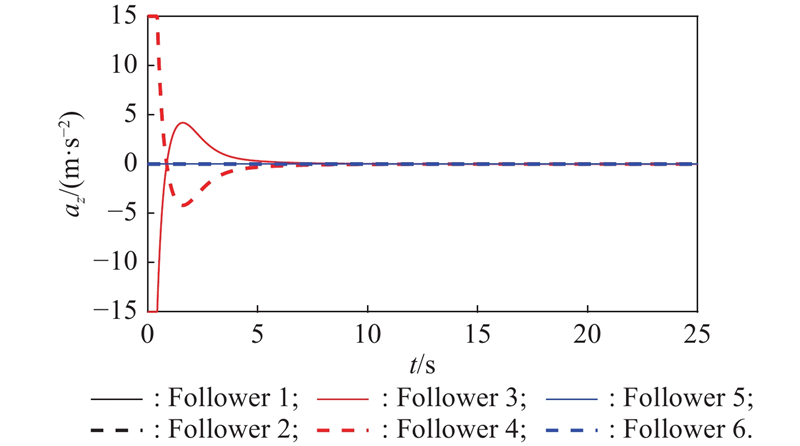
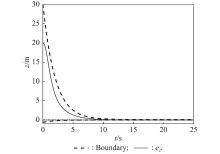
Fig 21
Simulation result of ${{\boldsymbol{e}}_{\boldsymbol{z}}}$ for Follower 3 "
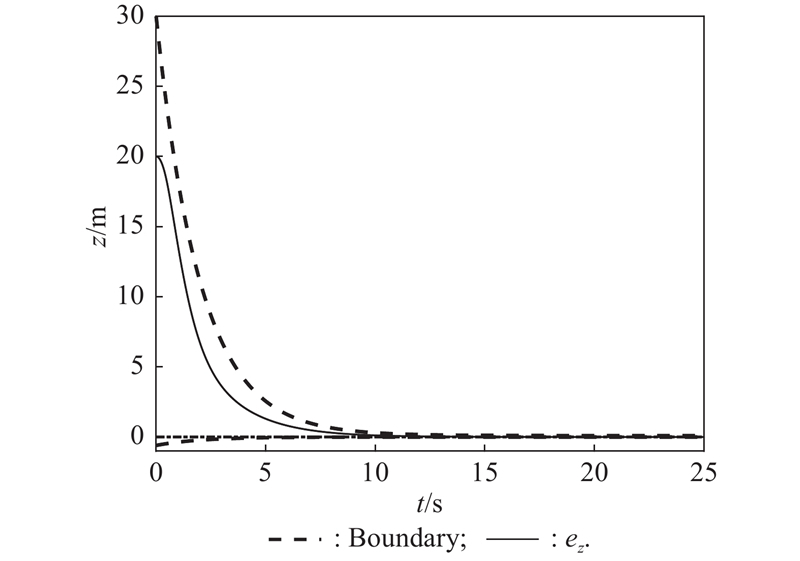
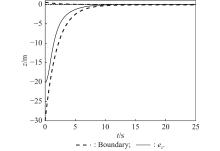
Fig 22
Simulation result of ${{\boldsymbol{e}}_{\boldsymbol{y}}}$ for Follower 6 "
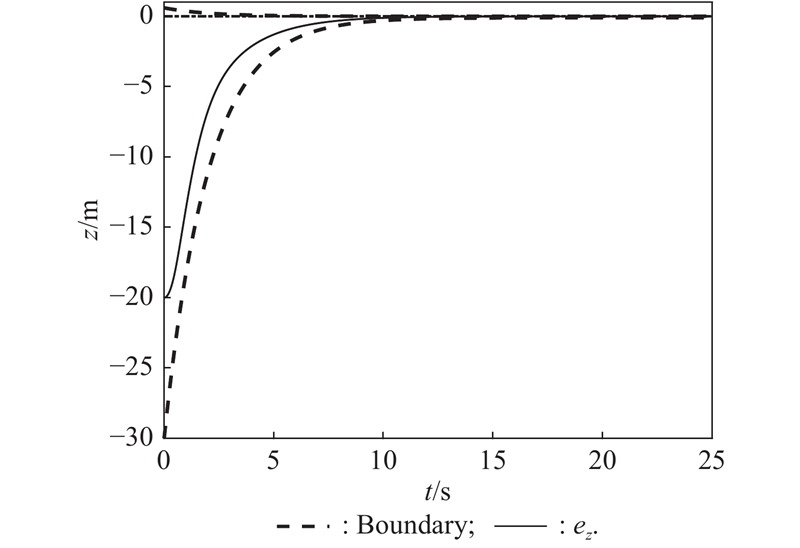
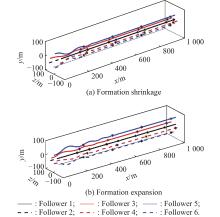
Fig 23
Formation trajectory with DSFC"
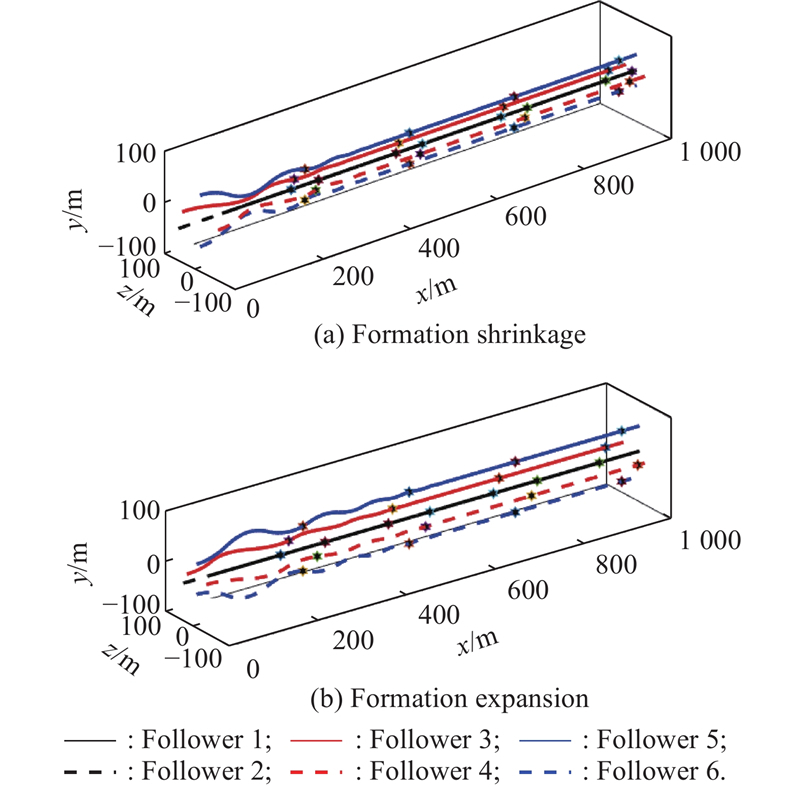
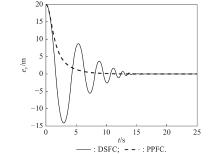
Fig 24
Comparison of ${{\boldsymbol{e}}_{\boldsymbol{y}}}$ for follower 6 using DSFC and the proposed PPFC "
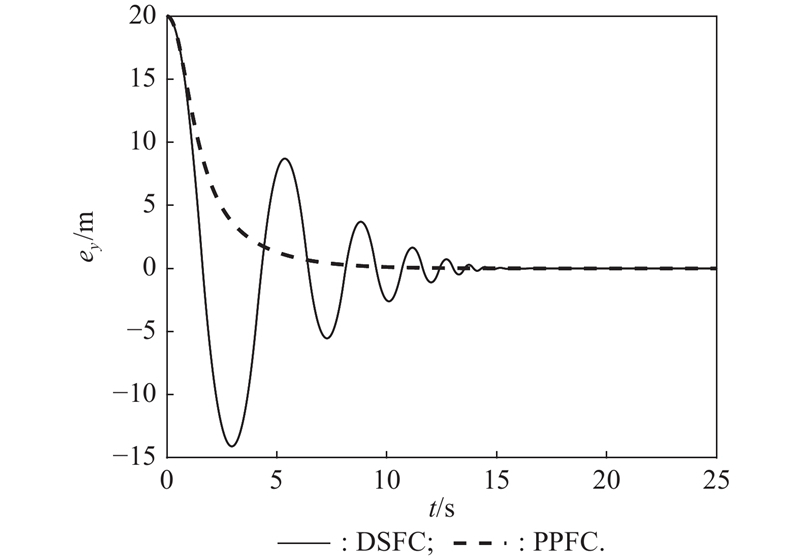
Table 3
Start point and end point of leader"
| Point | | | | |
| Start | 0 | 350 | 0 | 40 |
| End | 2000 | 350 | 1800 | 40 |
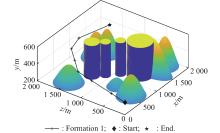
Fig 25
Leader’s trajectory with c = 400 "
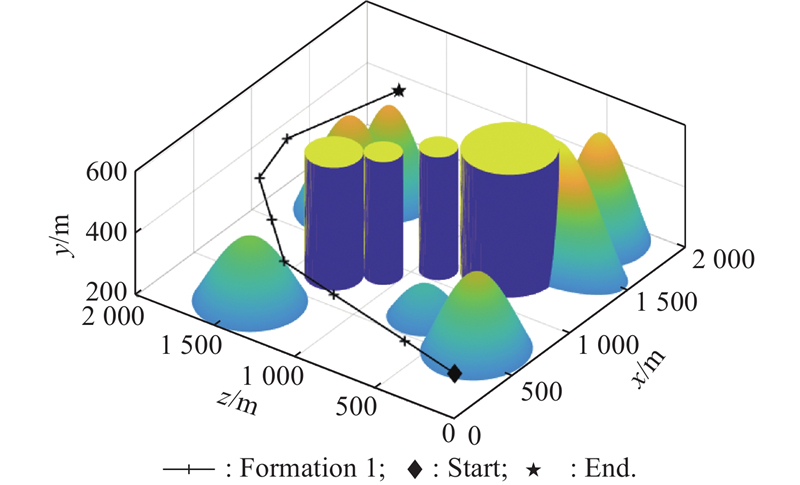
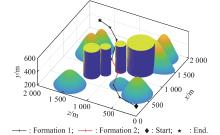
Fig 26
Leader’s trajectory with c = 0 "
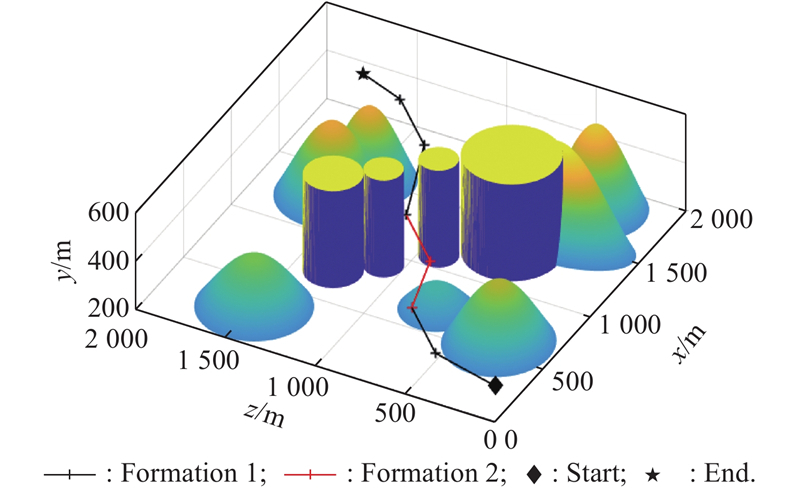
Fig 27
Trajectory of formation"
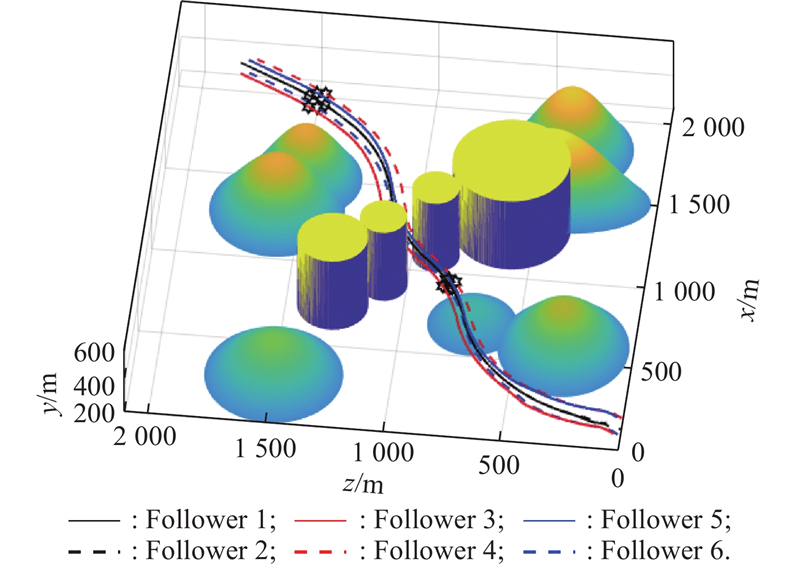
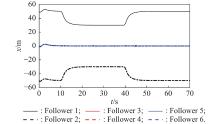
Fig 28
Relative distance of X -axis "
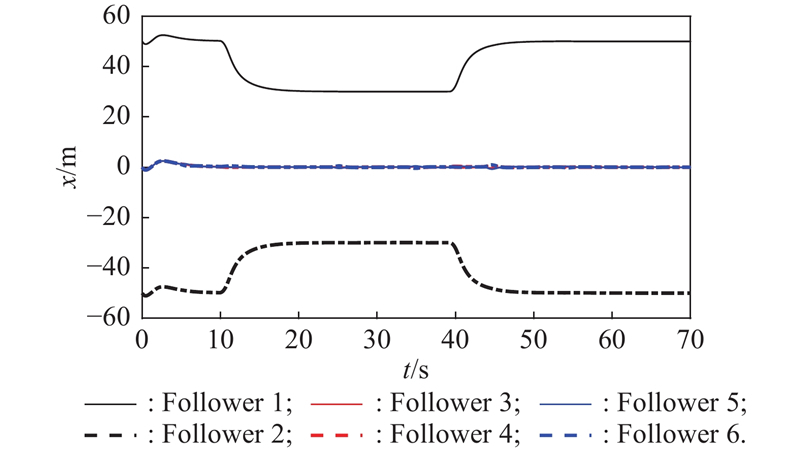
Fig 29
Relative distance of Y-axis "
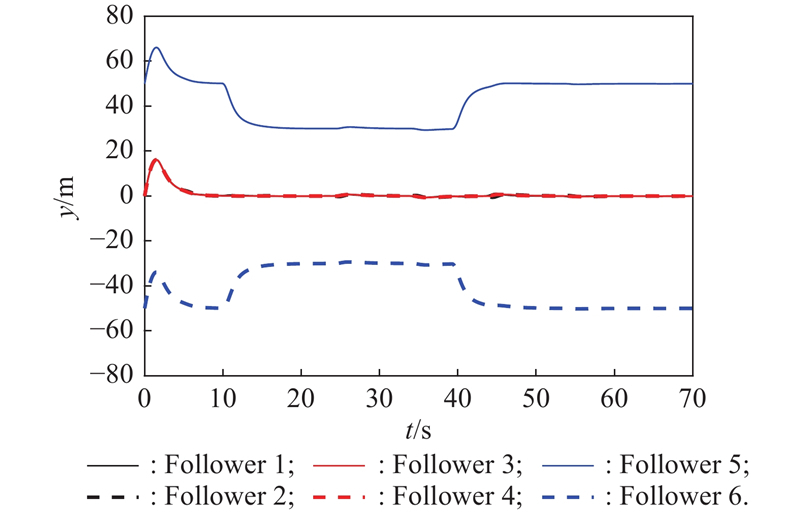
Fig 30
Relative distance of Z-axis "
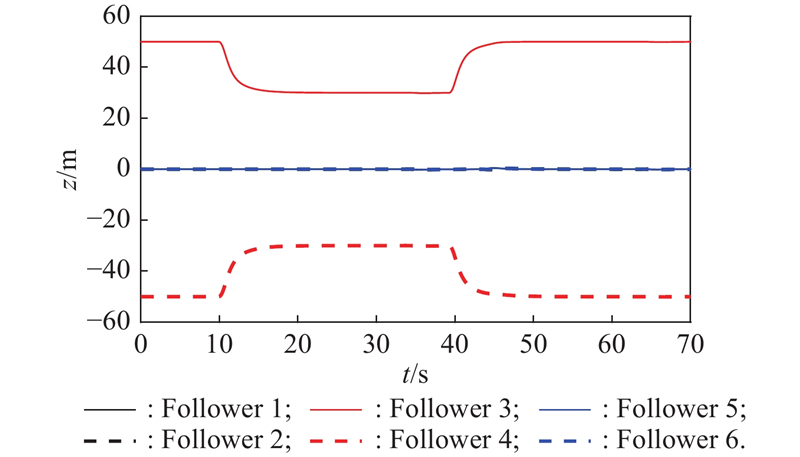
Fig 31
Formation trajectory with DSFC"
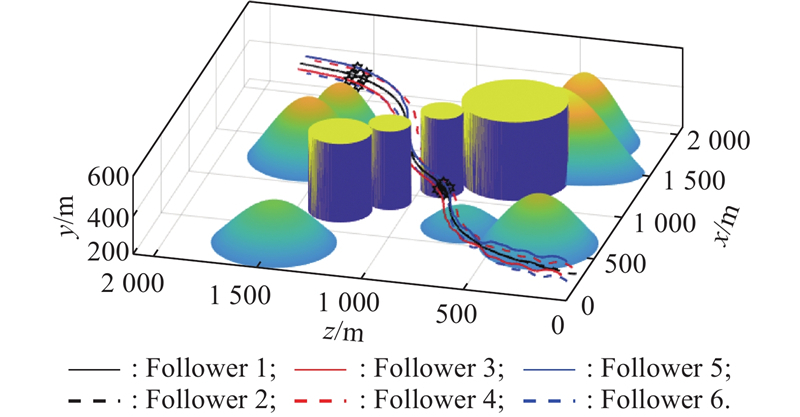
Fig 32
Relative distance of X-axis "
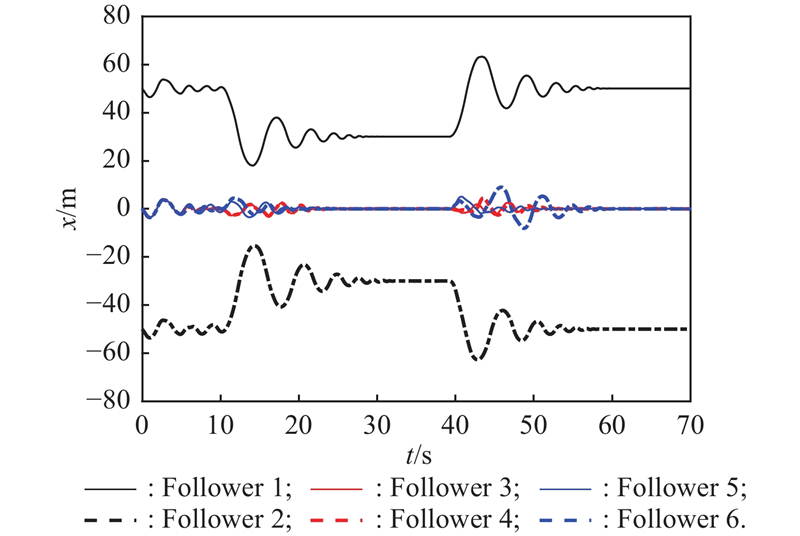
Fig 33
Relative distance of Y-axis "
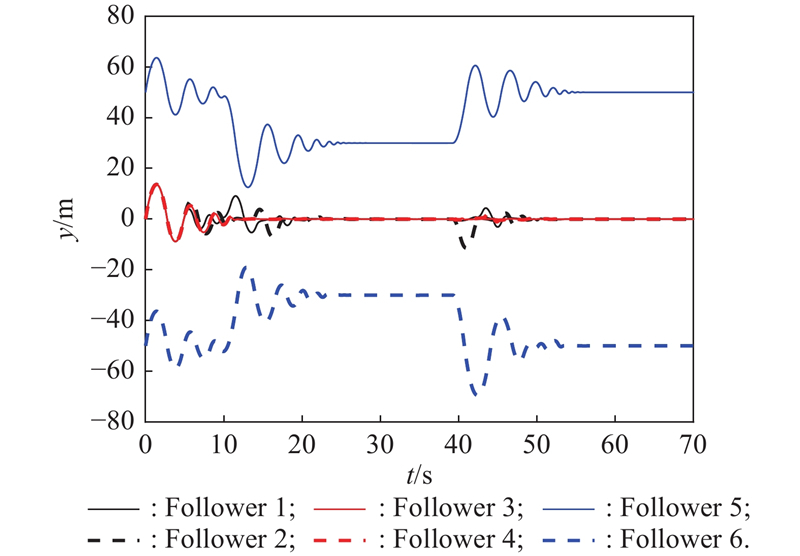
Fig 34
Relative distance of Z-axis "
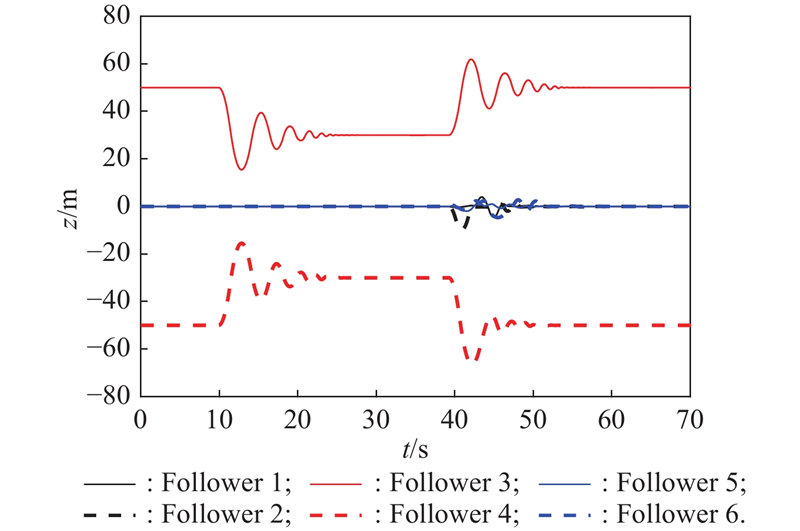
Fig 35
Formation trajectory with ${\boldsymbol{l}} = {\boldsymbol{200}}\;{\bf{m}}$ "
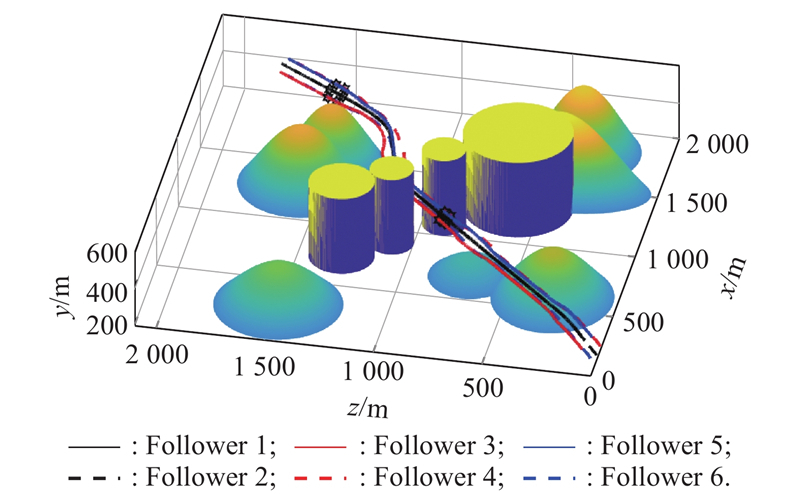
Fig 36
Relative distance of X "
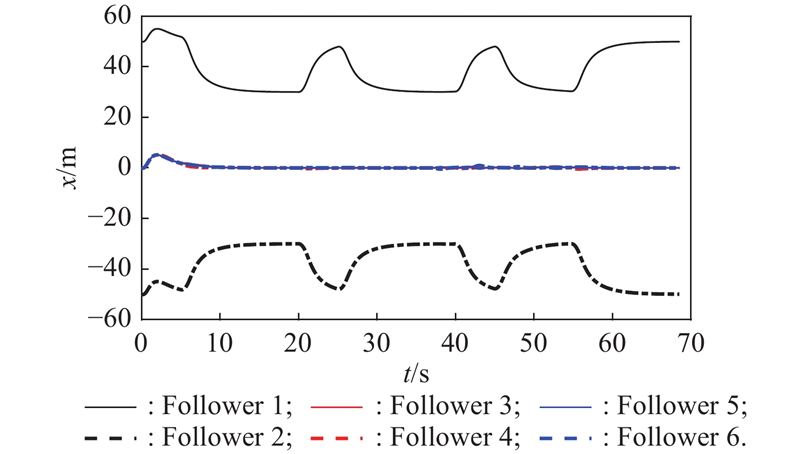
Fig 37
Relative distance of Y "
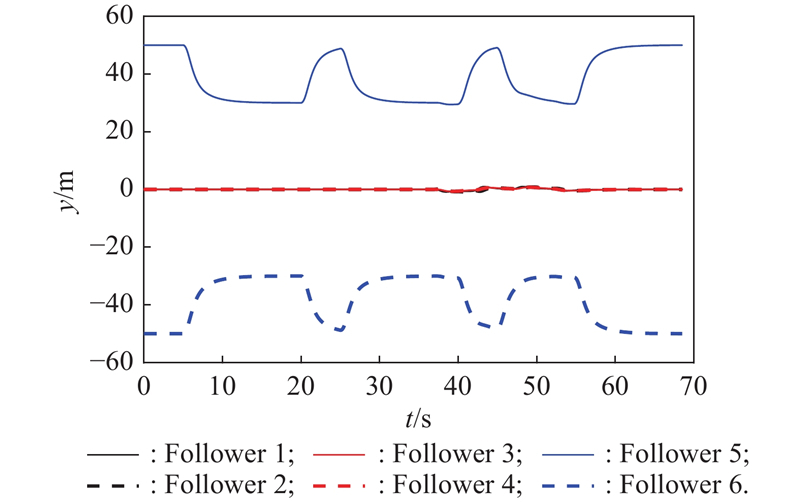
Fig 38
Relative distance of Z "
| 18 | DEHGHANI M A, MENHAJ M B, Integral sliding mode formation control of fixed-wing unmanned aircraft using seeker as a relative measurement system. Aerospace Science & Technology, 2016, 58: 318−327. |
| 19 |
ANTONIO V T J, ADRIEN G, MANUEL A M Event-triggered leader-following formation control for multi-agent systems under communication faults: application to a fleet of unmanned aerial vehicles. Journal of Systems Engineering and Electronics, 2021, 32 (5): 1014- 1022.
doi: 10.23919/JSEE.2021.000086 |
| 20 | TREJO J A V, GUENARD A, ADAM-MEDINA M. Formation control of leader-follower UAV based on the behavior of geese swarm. Control Engineering of China, 2022. DOI: 10.14107/j.cnki.kzgc.20200927. (in Chinese) |
| 21 | ZHAO Q, ZHEN Z Y. UAV formation control based on dueling double DQN . Journal of Beijing University of Aeronautics and Astronautics, 2022. DOI:10.13700/j.bh.1001-5965.2021.0601. (in Chinese) |
| 22 | ZHAO H W, YANG X X, SHRN R S, et al Prescribed performance fine attitude control for aeroelastic hypersonic vehicle. Acta Armamentarii, 2017, 38 (3): 501- 511. |
| 23 | ELHAKI O, SHOJAEI K. Trajectory tracking control of underactuated autonomous marine surface vessels with guaranteed prescribed performance. Proc. of the 6th RSI International Conference on Robotics and Mechatronics, 2018: 22–27. |
| 24 | ASL H J, NARIKIYO T, KAWANISHI M. Prescribed performance velocity field control of robotic exoskeletons with neural network. Proc. of the IEEE International Conference on Robotics and Biomimetics, 2017: 2704–2709. |
| 25 | KOSTARIGKA A K, DOULGERI Z, ROVITHAKIS G A. Prescribed performance tracking for flexible joint robots with unknown dynamics and elasticity. Proc. of the IEEE International Conference on Robotics and Automation, 2012: 5365–5370. |
| 26 |
ZHAO S Y, LI X B Prescribed performance fault tolerant control for hypersonic flight vehicles with actuator failures. IEEE Access, 2019, 7, 100187- 100204.
doi: 10.1109/ACCESS.2019.2930658 |
| 27 |
ZHANG Y, WANG S H, CHANG B Adaptive constrained backstepping controller with prescribed performance methodology for carrier-based UAV. Aerospace Science and Technology, 2019, 92, 55- 65.
doi: 10.1016/j.ast.2019.05.032 |
| 28 |
YANG M, LI G M, WANG S Y Prescribed performance control scheme for fixed trim reentry vehicle with actuator input and power constraints. Aerospace Science and Technology, 2020, 104, 105972.
doi: 10.1016/j.ast.2020.105972 |
| 29 | LIU D. Research on multi-missile cooperative guidance and control technology. Beijing: Beijing Institution of Technology, 2016. (in Chinese) |
| 30 | ZAFAR K, BAIG A R, BADAR S. Multi agent based mine detection and route planning using learning real time ${\rm{A}}^* $ algorithm. Proc. of the IEEE International Conference on Computer Science and ITS Applications, 2010. DOI: 10.1109/CSA.2009.5404275. |
| 1 | JIANG Y Y, GAO Y, SONG W Q, et al Bibliometric analysis of UAV swarms. Journal of Systems Engineering and Electronics, 2022, 33 (2): 406- 425. |
| 2 | XU Y, ZHENG W M, LUO D L, et al Dynamic affine formation control of networked under-actuated quad-rotor UAVs with three-dimensional patterns. Journal of Systems Engineering and Electronics, 2022, 33 (6): 1269- 1285. |
| 3 | ZHOU Y M, SU Y, XIE A H, et al A newly bio-inspired path planning algorithm for autonomous obstacle avoidance of UAV. Chinese Journal of Aeronautics, 2021, 34 (9): 199- 209. |
| 4 |
GU J C, DING G R, XU Y T, et al Proactive optimization of transmission power and 3D trajectory in UAV-assisted relay systems with mobile ground users. Chinese Journal of Aeronautics, 2021, 34 (3): 129- 144.
doi: 10.1016/j.cja.2020.09.028 |
| 5 | YIN G Y, ZHOU S L. Cooperative path planning of multi-missiles. Proc. of the IEEE Chinese Guidance, Navigation and Control Conference, 2014: 767–772. |
| 6 | YANG X X, ZHOU W W, ZHANG Y. On collaborative path planning for multiple UAVs based on Pythagorean hodograph curve. Proc. of the IEEE Chinese Guidance, Navigation and Control Conference, 2016: 971–975. |
| 7 | ZHANG Y A, ZHANG Y. Impact time and impact angle control based on CCC path planning. Proc. of the 31st Chinese Control Conference, 2012: 4300–4305. |
| 8 | LIU W, ZHENG Z, CAI K Y. Distributed on-line path planner for multi-UAV coordination using bi-level programming. Proc. of the 25th Chinese Control and Decision Conference, 2013: 5128–5133. |
| 9 | WOLFE J D , CHICHKA D F , SPEYER J L. Decentralized controllers for unmanned aerial vehicle formation flight. Proc. of the AIAA GNC Conference, 1996. DOI: 10.2514/6.1996-3833. |
| 10 | SHAO Z. Research on Technologies of Path planning and formation control for multi-UAVs formation. Xi’an: Northwestern Polytechnical University, 2017. (in Chinese) |
| 11 | BELKACEM K, MUNAWAR K, MUHAMMAD S S Distributed cooperative control of autonomous multi-agent UAV systems using smooth control. Journal of Systems Engineering and Electronics, 2020, 31 (6): 1297- 1307. |
| 12 |
LIANG Y Q, DONG Q, ZHAO Y J Adaptive leader-follower formation control for swarms of unmanned aerial vehicles with motion constraints and unknown disturbances. Chinese Journal of Aeronautics, 2020, 33 (11): 2972- 2988.
doi: 10.1016/j.cja.2020.03.020 |
| 13 |
ZHOU P P, CHEN B M Semi-global leader-following consensus-based formation flight of unmanned aerial vehicles. Chinese Journal of Aeronautics, 2022, 35 (1): 31- 43.
doi: 10.1016/j.cja.2021.02.013 |
| 14 |
CAI Z H, WANG L H, ZHAO J Virtual target guidance-based distributed model predictive control for formation control of multiple UAVs. Chinese Journal of Aeronautics, 2020, 33 (3): 1037- 1056.
doi: 10.1016/j.cja.2019.07.016 |
| 15 | WANG X. Formation flying technology of UAV. Xi’an: Northwestern Polytechnical University Press, 2015. (in Chinese) |
| 16 | LIU W, WU Q P, ZHOU S L. Leader-follower consensus control of multi-agent systems with extended Laplacian matrix. Proc. of the 27th Chinese Control and Decision Conference, 2015: 5393–5397. |
| 17 | DEHGHANI M A, MENHAJ M B Communication free leader–follower formation control of unmanned aircraft systems. Robotics & Autonomous Systems, 2016, 80, 69- 75. |
| [1] | Lei HU, Guoxing YI, Yi NAN, Hao WANG. Combat situation suppression of multiple UAVs based on spatiotemporal cooperative path planning [J]. Journal of Systems Engineering and Electronics, 2023, 34(5): 1191-1210. |
| [2] | Feng WU, Xiuluo LIU, Jia WANG, Chao LI, Ying LIU, Jianbin SU, Ailiang ZHANG, Min WANG. Research on agile space emergency launching mission planning simulation and verification method [J]. Journal of Systems Engineering and Electronics, 2023, 34(5): 1267-1284. |
| [3] | Yang XU, Weiming ZHENG, Delin LUO, Haibin DUAN. Dynamic affine formation control of networked under-actuated quad-rotor UAVs with three-dimensional patterns [J]. Journal of Systems Engineering and Electronics, 2022, 33(6): 1269-1285. |
| [4] | Juan Antonio VAZQUEZ TREJO, Adrien GUENARD, Manuel ADAM-MEDINA, Jean-Christophe PONSART, Laurent CIARLETTA, Damiano ROTONDO, Didier THEILLIOL. Event-triggered leader-following formation control for multi-agent systems under communication faults: application to a fleet of unmanned aerial vehicles [J]. Journal of Systems Engineering and Electronics, 2021, 32(5): 1014-1022. |
| [5] | Kada BELKACEM, Khalid MUNAWAR, Shafique Shaikh MUHAMMAD. Distributed cooperative control of autonomous multi-agent UAV systems using smooth control [J]. Journal of Systems Engineering and Electronics, 2020, 31(6): 1297-1307. |
| [6] | Enjiao ZHAO, Zenan ZHONG, Xin ZHENG. Finite-time control of formation system for multiple flight vehicles subject to actuator saturation [J]. Journal of Systems Engineering and Electronics, 2020, 31(5): 1019-1030. |
| [7] | Yandong LI, Ling ZHU, Yuan GUO. Observer-based multivariable fixed-time formation control of mobile robots [J]. Journal of Systems Engineering and Electronics, 2020, 31(2): 403-414. |
| [8] | Jin ZHOU, Lei SHAO, Huaji WANG, Dayuan ZHANG, Humin LEI. Optimal midcourse trajectory planning considering the capture region [J]. Journal of Systems Engineering and Electronics, 2018, 29(3): 587-600. |
| [9] | Liang Yang, Wanchun Chen, Xiaoming Liu, and Hao Zhou. Robust entry guidance using multi-segment linear pseudospectral model predictive control [J]. Systems Engineering and Electronics, 2017, 28(1): 103-. |
| [10] | Kun Zhang and Xiaoguang Gao. Distributed tracking control of unmanned aerial vehicles under wind disturbance and model uncertainty [J]. Journal of Systems Engineering and Electronics, 2016, 27(6): 1262-1271. |
| [11] | Jiang Zhao, Rui Zhou, and Xuelian Jin. Progress in reentry trajectory planning for hypersonic vehicle [J]. Journal of Systems Engineering and Electronics, 2014, 25(4): 627-. |
| [12] | Li Song, Qinghe Wu, Di Yu, and Yinqiu Wang. Distributed stereoscopic rotating formation control of networks of second-order agents [J]. Journal of Systems Engineering and Electronics, 2013, 24(3): 480-. |
| [13] | Yu Zhang, Jing Chen, and Lincheng Shen. Hybrid hierarchical trajectory planning for a fixed-wing UCAV performing air-to-surface multi-target attack [J]. Journal of Systems Engineering and Electronics, 2012, 23(4): 536-552. |
| [14] | Xiaoyuan Luo, Nani Han, and Xinping Guan. Leader-following consensus protocols for formation control of multi-agent network [J]. Journal of Systems Engineering and Electronics, 2011, 22(6): 991-997. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||