
Journal of Systems Engineering and Electronics ›› 2021, Vol. 32 ›› Issue (5): 1031-1040.doi: 10.23919/JSEE.2021.000088
• New Developments on FDD and FTC Techniques • Previous Articles Next Articles
Sader MALIKA1,2( ), Fuyong WANG1,2(), Zhongxin LIU1,2,*(), Zengqiang CHEN1,2()
), Fuyong WANG1,2(), Zhongxin LIU1,2,*(), Zengqiang CHEN1,2()
Received:2020-12-22
Online:2021-10-18
Published:2021-11-04
Contact:
Zhongxin LIU
E-mail:1120190153@mail.nankai.edu.cn;wangfy@nankai.edu.cn;lzhx@nankai.edu.cn;chenzq@nankai.edu.cn
About author:Supported by:Sader MALIKA, Fuyong WANG, Zhongxin LIU, Zengqiang CHEN. Distributed fuzzy fault-tolerant consensus of leader-follower multi-agent systems with mismatched uncertainties[J]. Journal of Systems Engineering and Electronics, 2021, 32(5): 1031-1040.
Table 1
Actuator fault model"
| Fault mode | | | |
| Normal | 1 | 1 | 0 |
| LOE | >0 | <1 | 0 |
| Bias | 1 | 1 | ≠0 |
| Outage | 0 | 0 | 0 |
| Stuck | 0 | 0 | ≠0 |
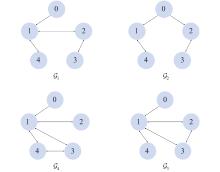
Fig 1
Network topologies with four followers"
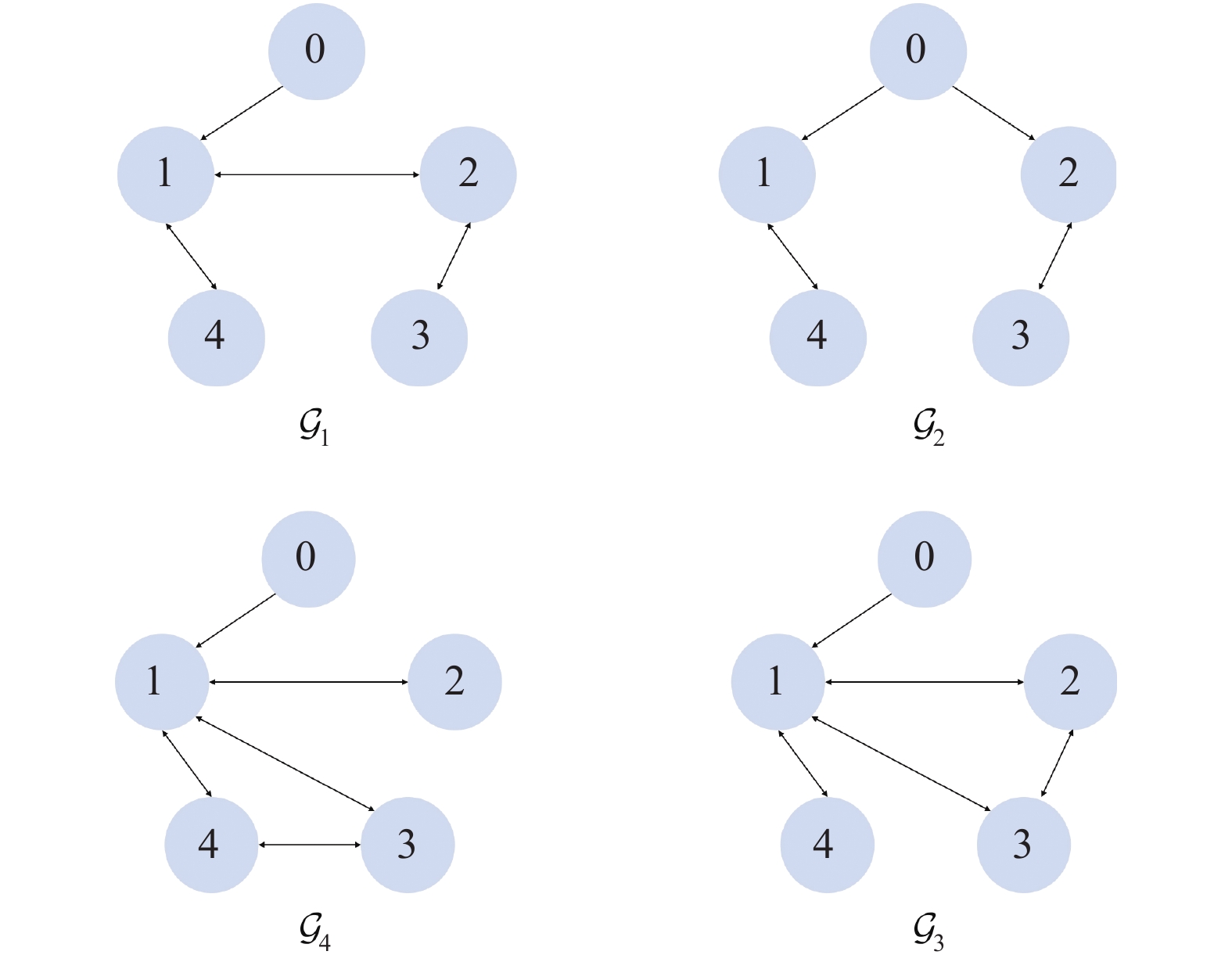
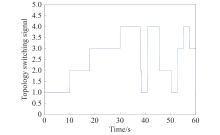
Fig 2
Switching signal of communication graphs"
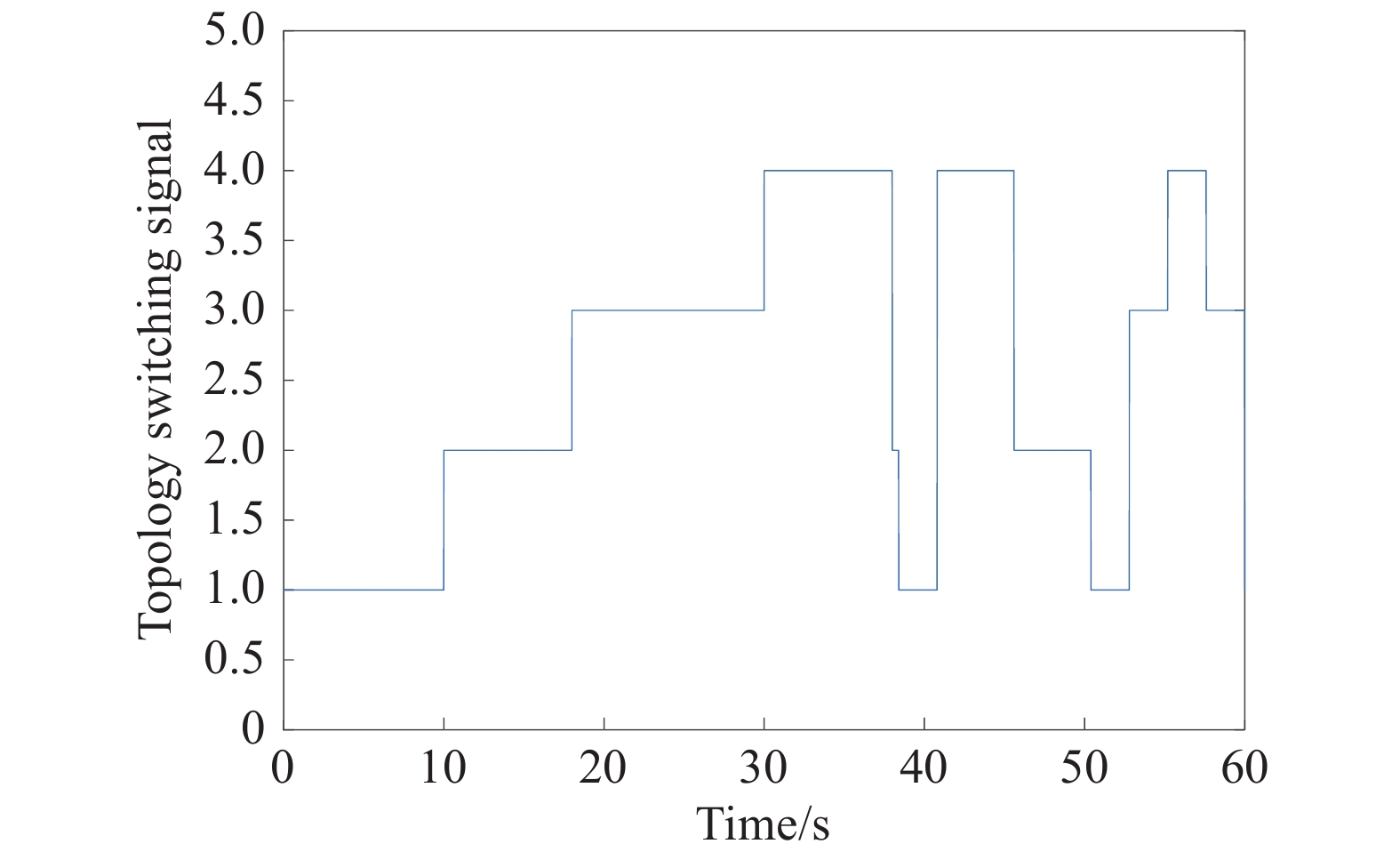
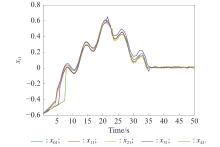
Fig 3
Response curves of ${{\boldsymbol{x}}_{{\boldsymbol{i1}}}}({\boldsymbol{t}})$ ( ${\boldsymbol{i}} = {\boldsymbol{0}}, \cdots ,{\boldsymbol{4}}$ ) using controller (8) "
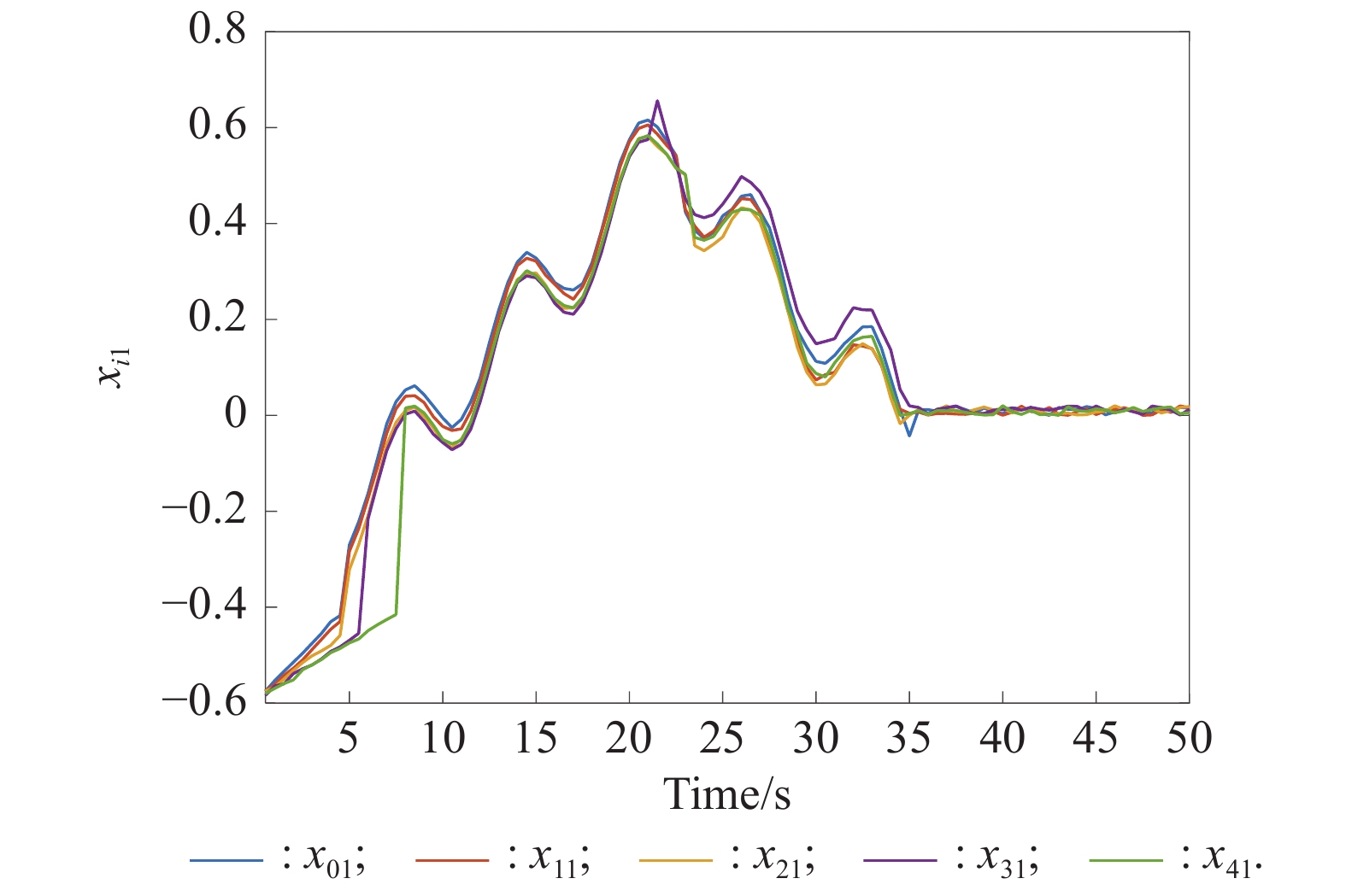
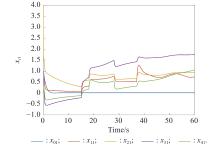
Fig 4
Response curves of ${{\boldsymbol{x}}_{{\boldsymbol{i1}}}}({\boldsymbol{t}})$ ( ${\boldsymbol{i}} = {\boldsymbol{0}}, \cdots ,{\boldsymbol{4}}$ ) using controller in [33] "
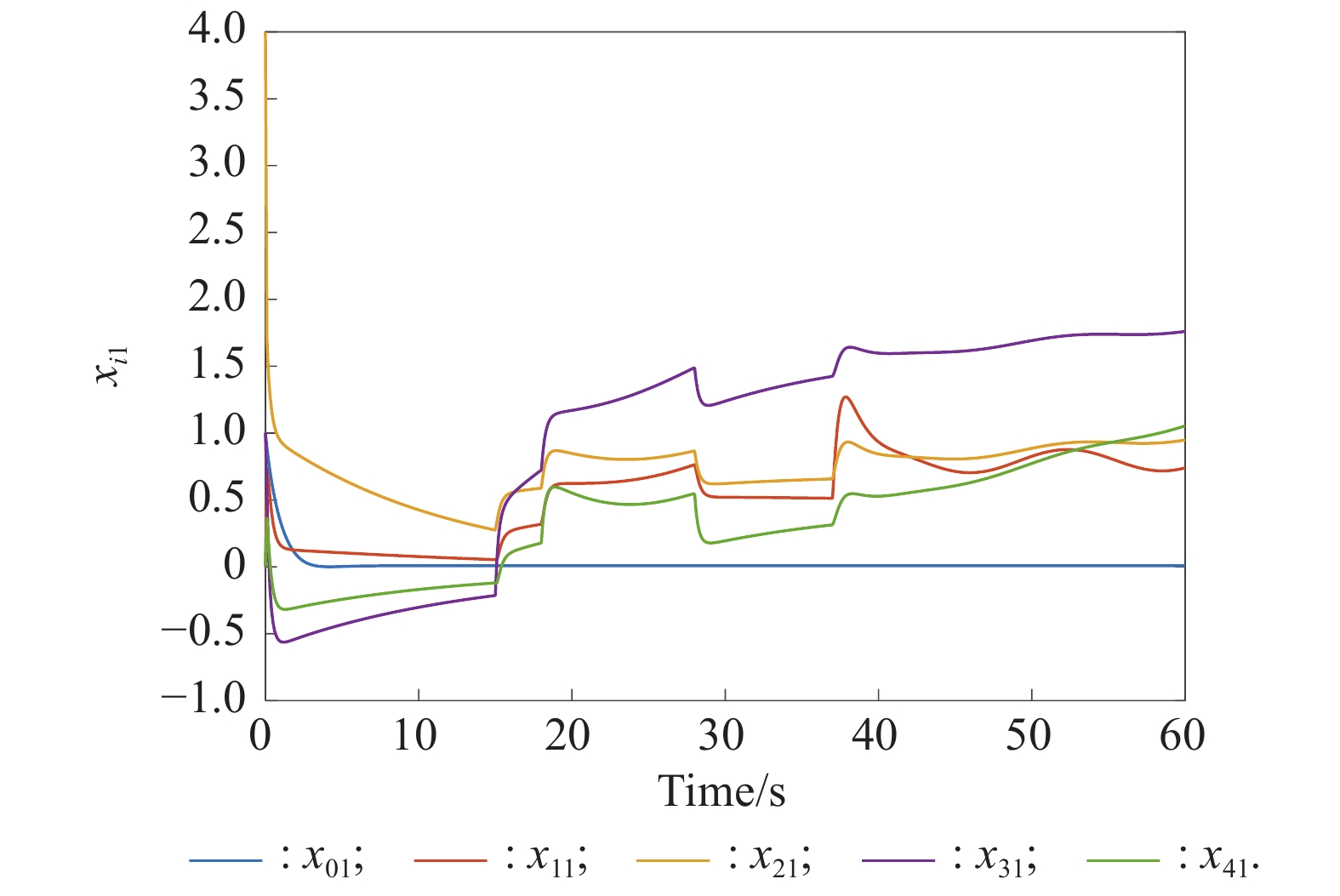
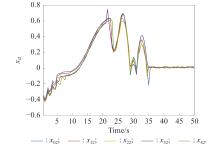
Fig 5
Response curves of ${{\boldsymbol{x}}_{{\boldsymbol{i2}}}}({\boldsymbol{t}})$ ( ${\boldsymbol{i}} = {\boldsymbol{0}}, \cdots ,{\boldsymbol{4}}$ ) using controller (8) "
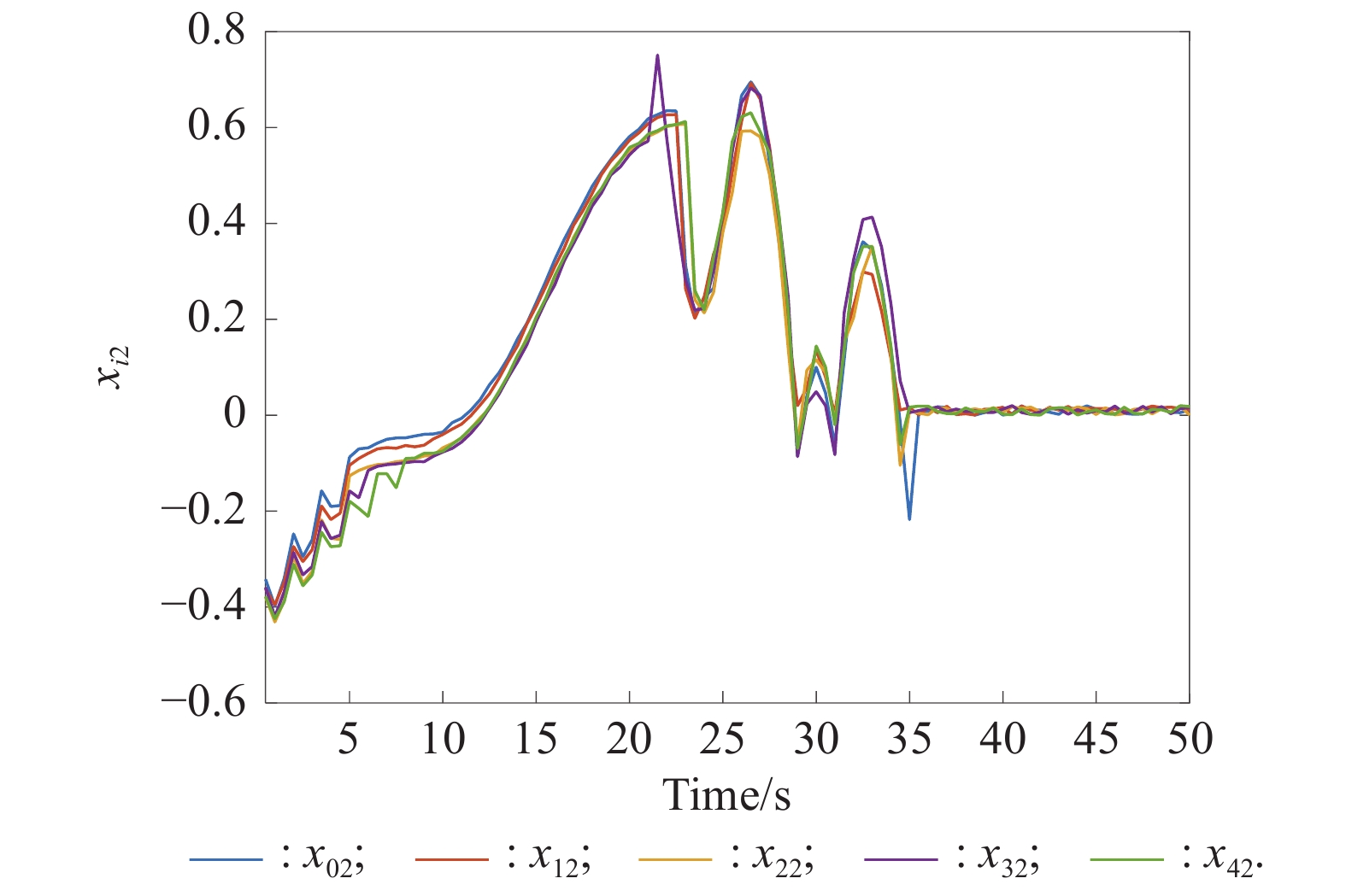
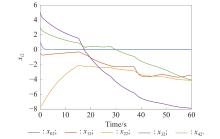
Fig 6
Response curves of ${{\boldsymbol{x}}_{{\boldsymbol{i2}}}}({\boldsymbol{t}})$ ( ${\boldsymbol{i}} = {\boldsymbol{0}}, \cdots ,{\boldsymbol{4}}$ ) using controller in [33] "
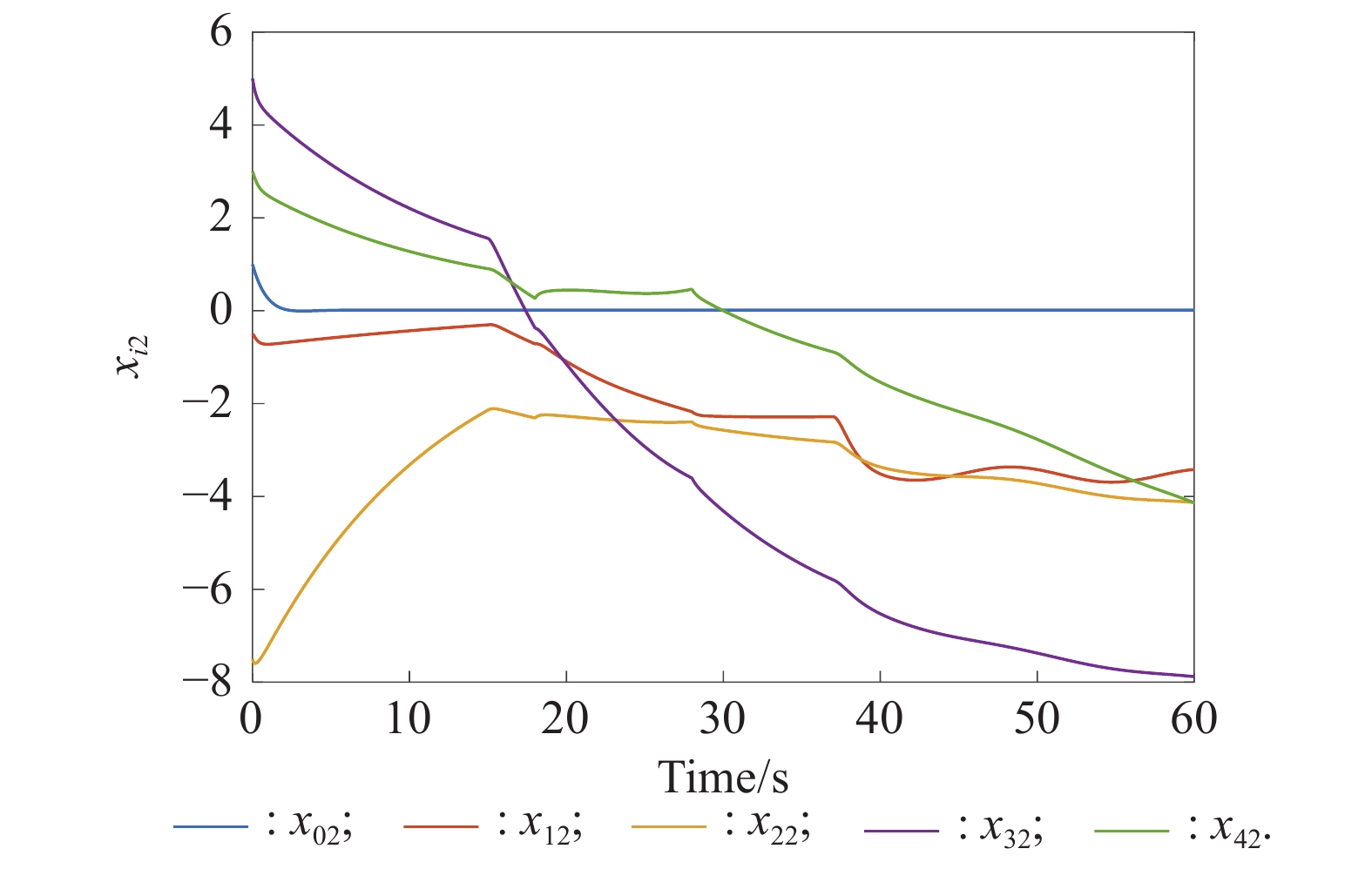
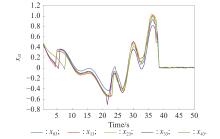
Fig 7
Response curves of ${{\boldsymbol{x}}_{{\boldsymbol{i3}}}}({\boldsymbol{t}})$ ( ${\boldsymbol{i}} = {\boldsymbol{0}}, \cdots ,{\boldsymbol{4}}$ ) using controller (8) "
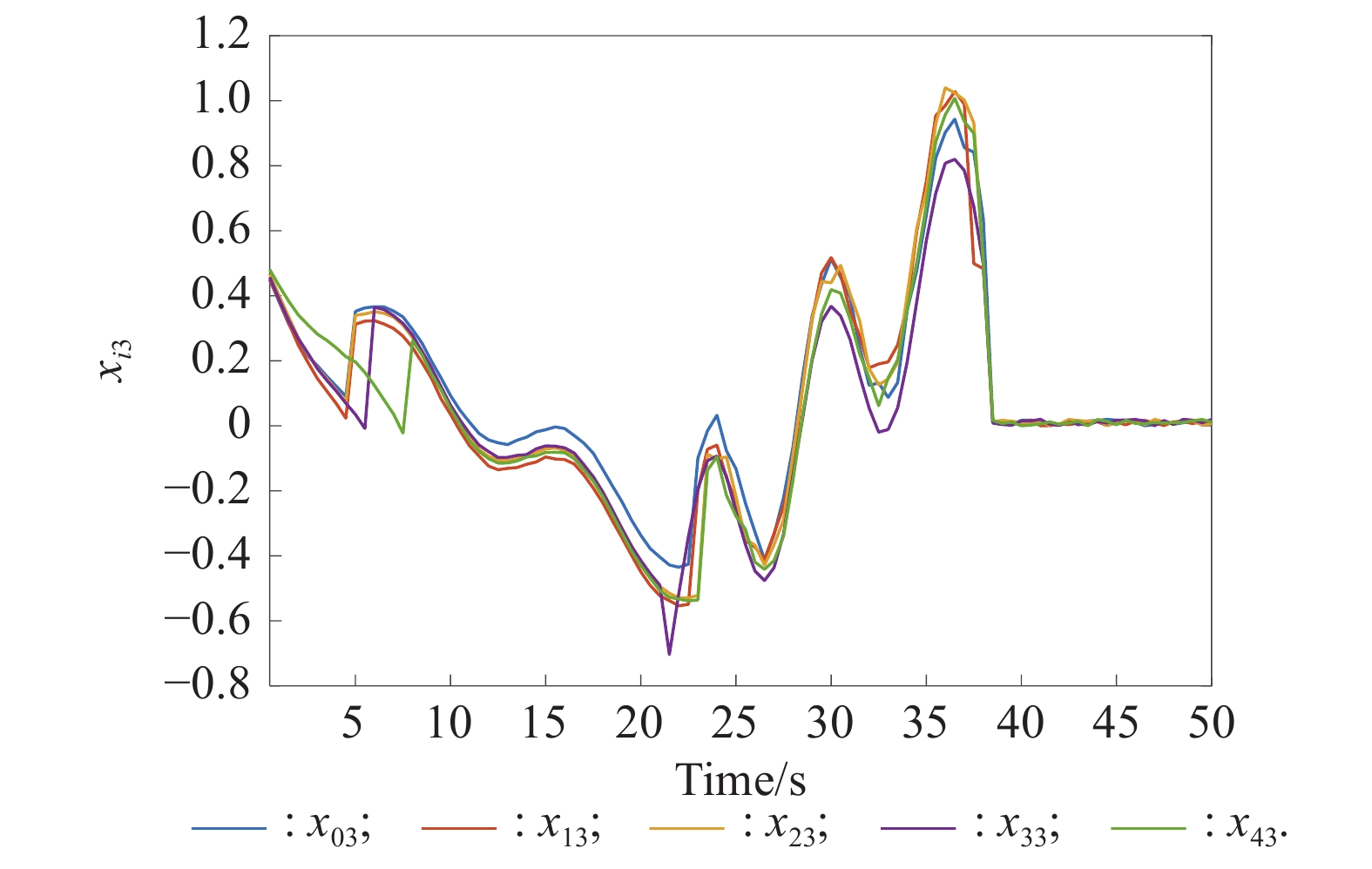
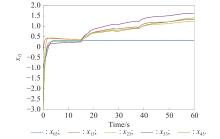
Fig 8
Response curves of ${{\boldsymbol{x}}_{{\boldsymbol{i3}}}}({\boldsymbol{t}})$ ( ${\boldsymbol{i}} = {\boldsymbol{0}}, \cdots ,{\boldsymbol{4}}$ ) using controller in [33] "
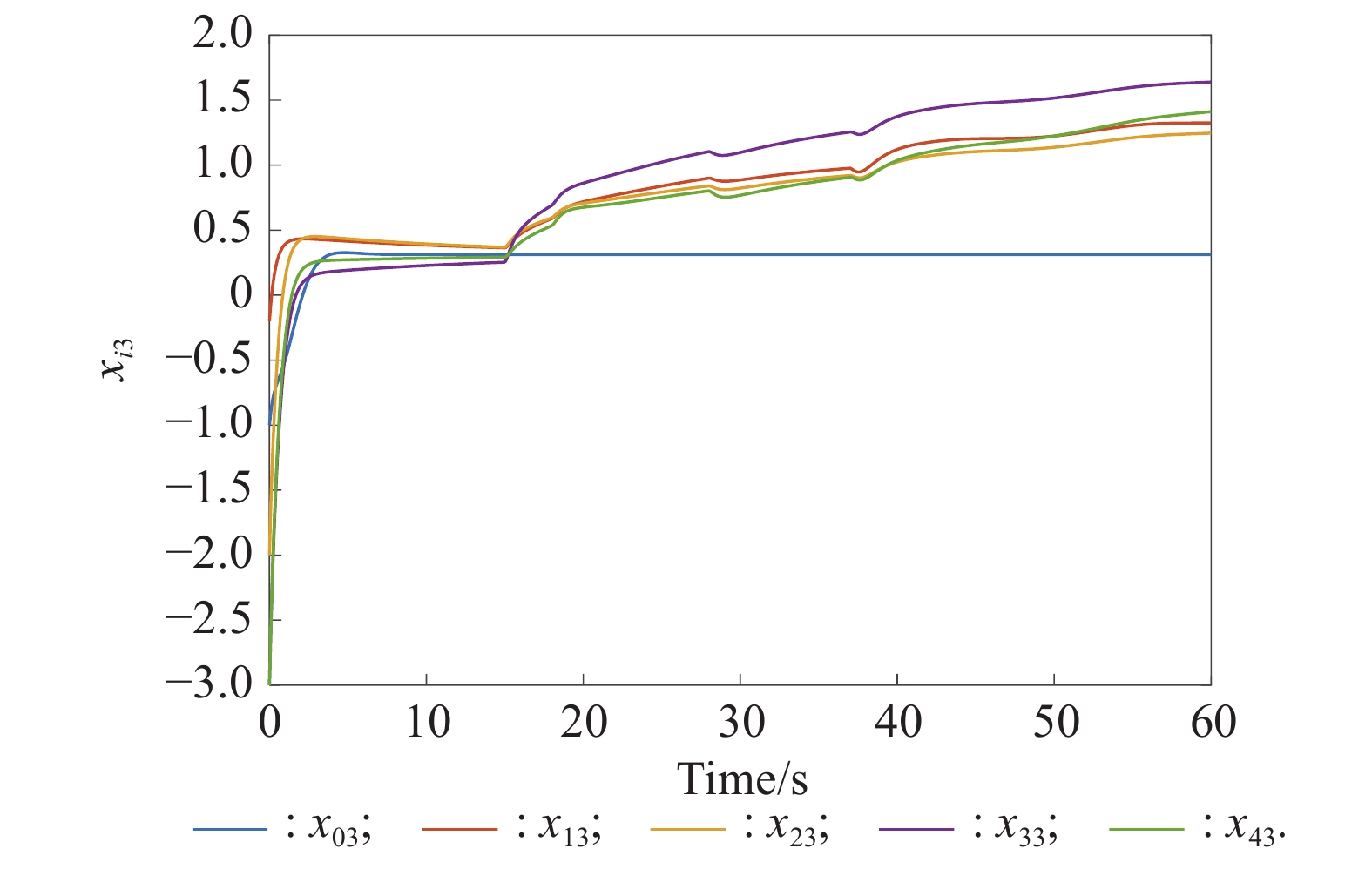
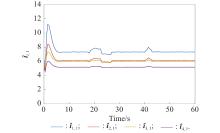
Fig 9
Response curves of ${\hat {\boldsymbol{l}}_{{\boldsymbol{i,1}}}}({\boldsymbol{t}})$ ( ${\boldsymbol{i }}= {\boldsymbol{1}}, \cdots ,{\boldsymbol{4}}$ ) "
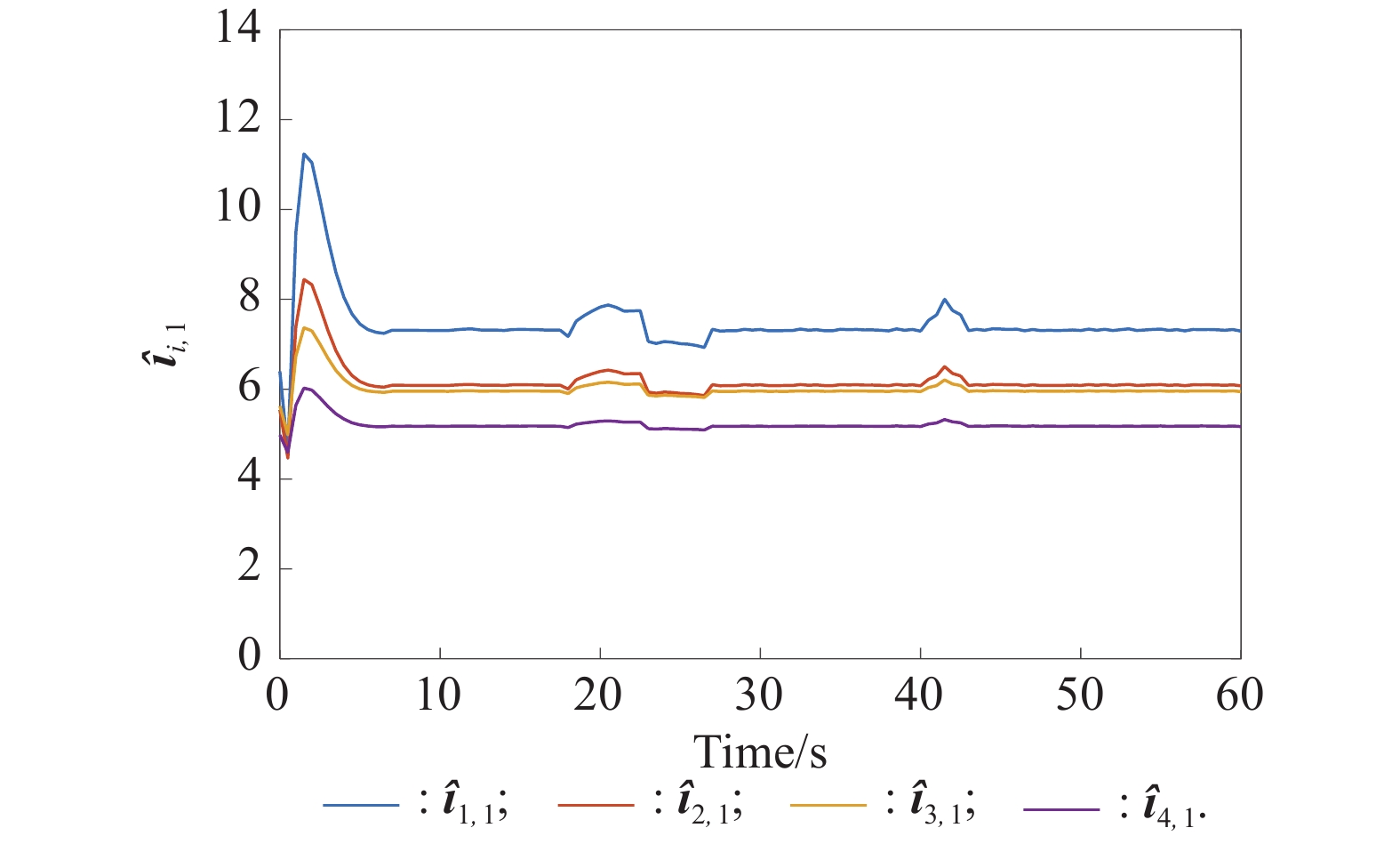
Fig 10
Response curves of ${\hat {\boldsymbol{l}}_{{\boldsymbol{i,2}}}}({\boldsymbol{t}})$ ( ${\boldsymbol{i }}= {\boldsymbol{1}}, \cdots ,{\boldsymbol{4}}$ ) "
Fig 11
Response curves of ${\hat {\boldsymbol{l}}_{{\boldsymbol{i,3}}}}({\boldsymbol{t}})$ ( ${\boldsymbol{i }}= {\boldsymbol{1}}, \cdots ,{\boldsymbol{4}}$ ) "
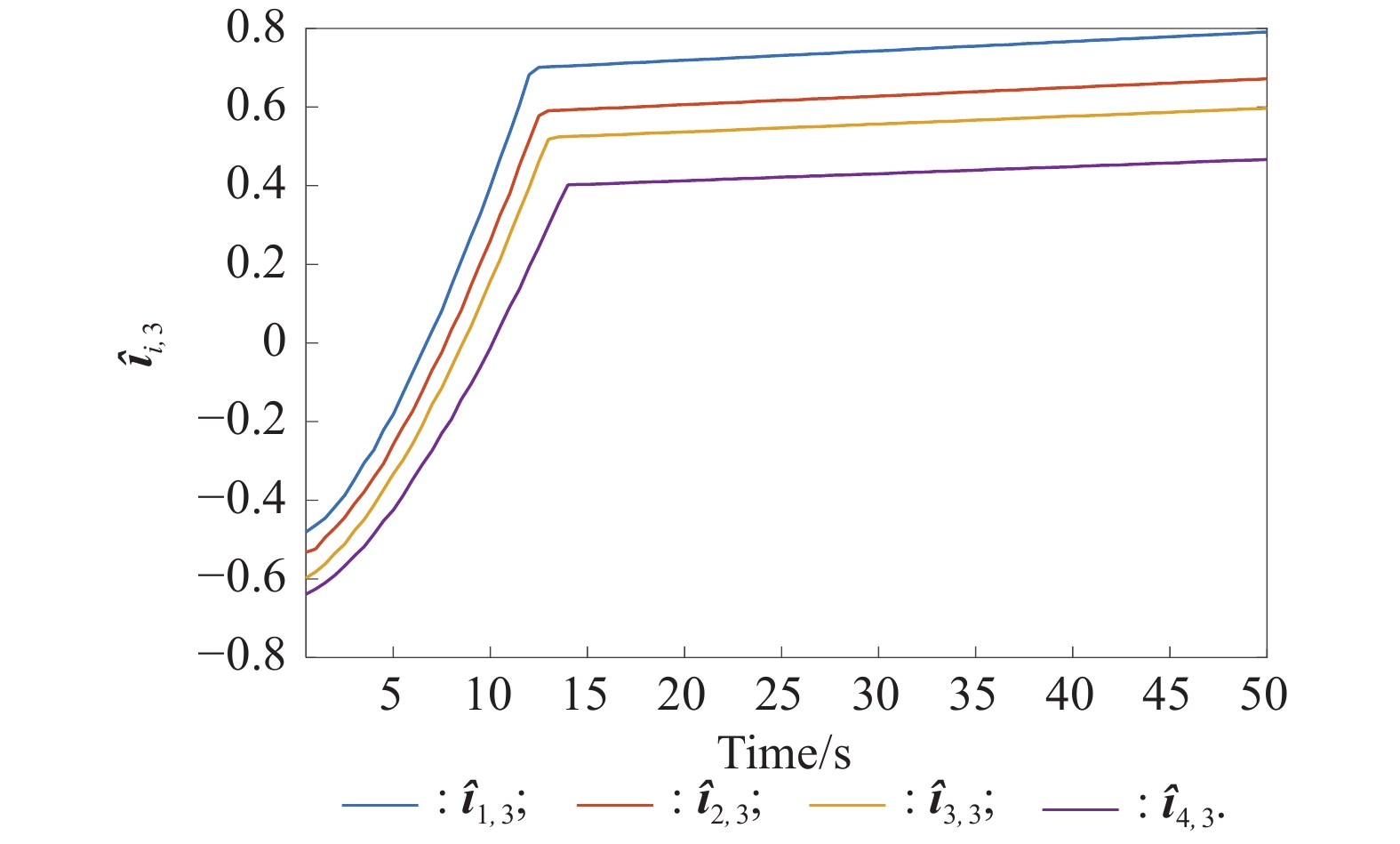
Fig 12
Response curves of ${\hat {\boldsymbol{l}}_{{\boldsymbol{i,4}}}}({\boldsymbol{t}})$ ( ${\boldsymbol{i }}= {\boldsymbol{1}}, \cdots ,{\boldsymbol{4}}$ ) "
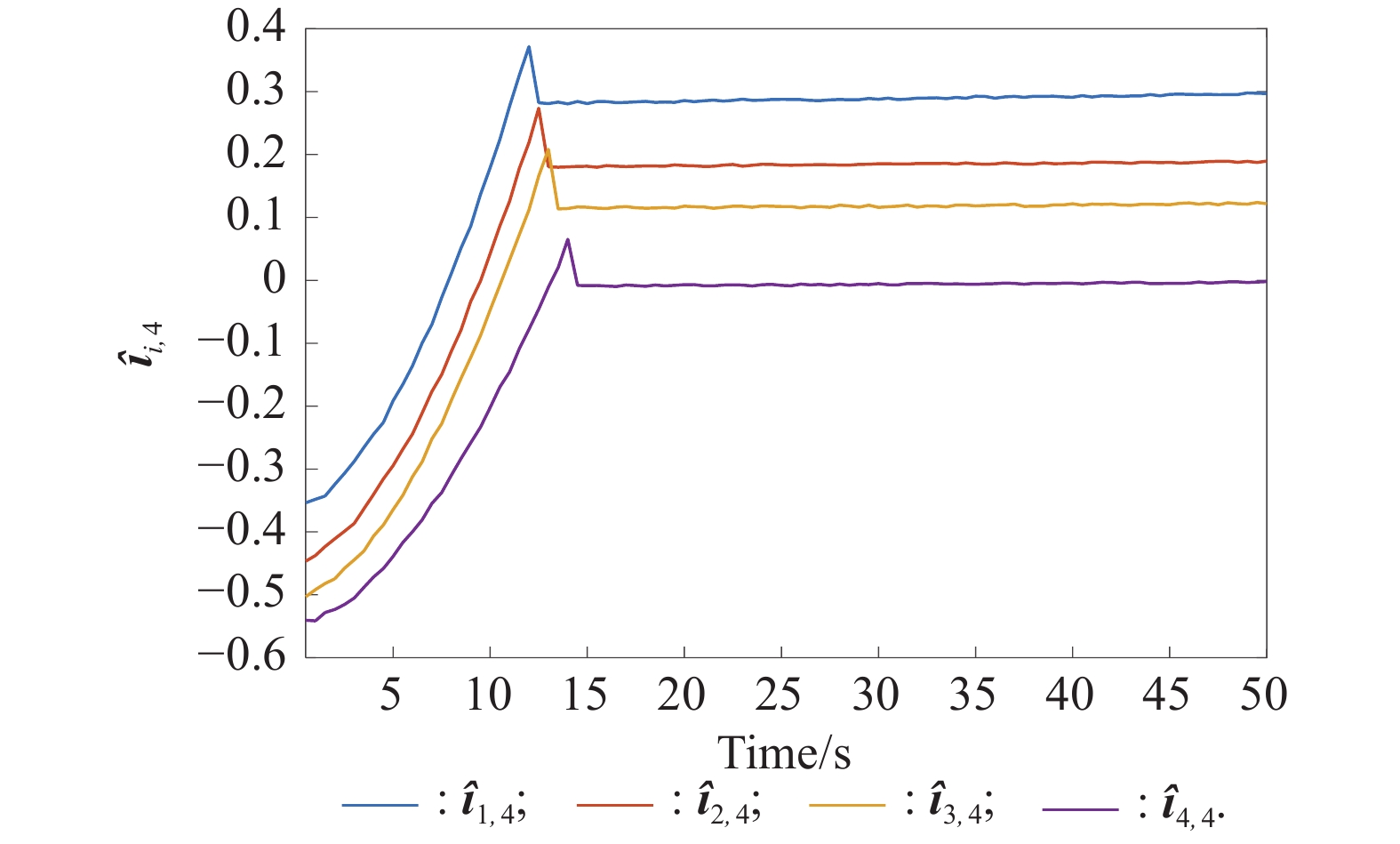
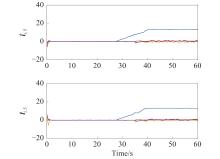
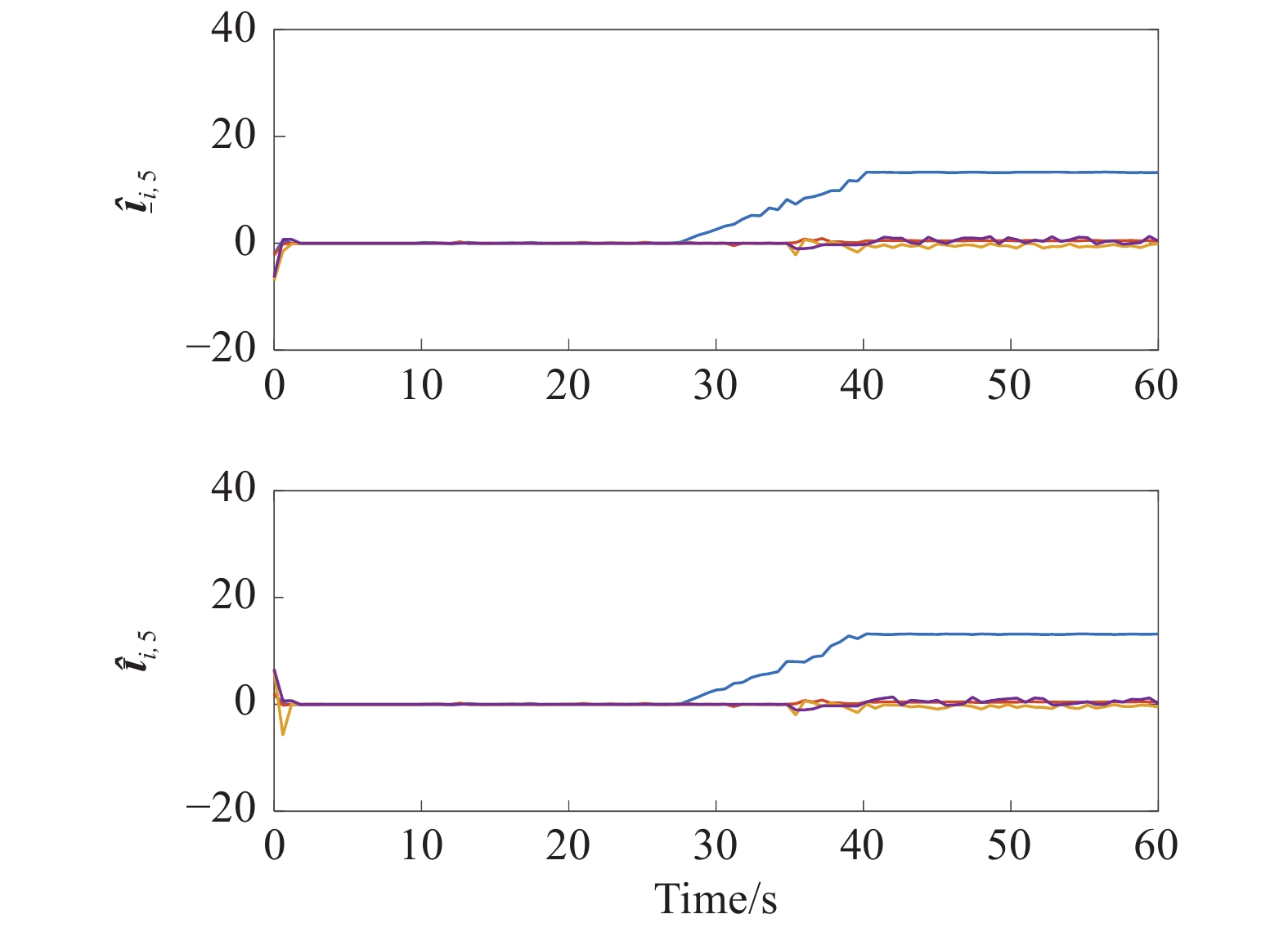
Fig 13
Response curves of ${\hat {\overline {\boldsymbol{l}} }_{{\boldsymbol{i,5}}}}$ and ${\underline {\hat {\boldsymbol{l}}} _{{\boldsymbol{i,5}}}}$ ( ${\boldsymbol{i}} = {\boldsymbol{1}}, \cdots ,{\boldsymbol{4}}$ ) "
| 1 |
WU G F, WAN K F, GAO X G, et al Placement of unmanned aerial vehicles as communication relays in two-tiered multi-agent system: clustering based methods. Journal of Systems Engineering and Electronics, 2020, 31 (2): 231- 242.
doi: 10.23919/JSEE.2020.000001 |
| 2 | LIU J Y, WANG G, ZHANG J, et al Target optimal assignment model based on improved AGD-distributed multi-agent system. Systems Engineering and Electronics, 2020, 42 (4): 863- 870. |
| 3 |
WANG F, NI Y H, LIU Z X, et al Fully distributed containment control for second-order multi-agent systems with communication delay. ISA Transactions, 2020, 99, 123- 129.
doi: 10.1016/j.isatra.2019.09.009 |
| 4 | VICSEK T, CZIROK A, BEN-JACOB E, et al Novel type of phase transition in a system of self-driven particles. Physical Review Letters, 2006, 75 (6): 1226- 1229. |
| 5 |
JADBABAIE A, LIN J, MORSE A S Erratum: coordination of groups of mobile autonomous agents using nearest neighbor rules. IEEE Trans. on Automatic Control, 2003, 48 (9): 1675- 1675.
doi: 10.1109/TAC.2003.817537 |
| 6 |
FAX J A, MURRAY R M Information flow and cooperative control of vehicle formations. IEEE Trans. on Automatic Control, 2004, 49 (1): 115- 120.
doi: 10.1109/TAC.2003.821398 |
| 7 |
QIN J H, MA Q C, YU X H, et al On synchronization of dynamical systems over directed switching topologies: an algebraic and geometric perspective. IEEE Trans. on Automatic Control, 2020, 65 (12): 5083- 5098.
doi: 10.1109/TAC.2020.2971980 |
| 8 |
WANG F Y, NI Y H, LIU Z X, et al Containment control for general second-order multi-agent systems with switched dynamics. IEEE Trans. on Cybernetics, 2020, 50 (2): 550- 560.
doi: 10.1109/TCYB.2018.2869706 |
| 9 |
LIU J, ZHANG Y L, YU Y, et al Fixed-time leader-follower consensus of networked nonlinear systems via event/self-triggered control. IEEE Trans. on Neural Networks and Learning Systems, 2020, 31 (11): 5029- 5037.
doi: 10.1109/TNNLS.2019.2957069 |
| 10 |
LIU J, ZHANG Y L, YU Y, et al Fixed-time event-triggered consensus for nonlinear multiagent systems without continuous communications. IEEE Trans. on Systems, Man, and Cybernetics, 2019, 49 (11): 2221- 2229.
doi: 10.1109/TSMC.2018.2876334 |
| 11 | LIU Y F, SU H S, ZENG Z G. Second-order consensus for multiagent systems with switched dynamics. IEEE Trans. on Cybernetics, 2020. DOI:10.1109/TCYB.2020.3015977. |
| 12 | METIHALLI B K, SABHAHIT J N. Disturbance observer based distributed consensus control strategy of multi-agent system with external disturbance in a standalone DC microgrid. Asian Journal of Control, 2020. DOI:10.1002/asjc.2287. |
| 13 |
DENG C, CHE W W, SHI P Cooperative fault-tolerant output regulation for multiagent systems by distributed learning control approach. IEEE Trans. on Neural Networks and Learning Systems, 2020, 31 (11): 4831- 4841.
doi: 10.1109/TNNLS.2019.2958151 |
| 14 | ZHANG H, CHEN J, WANG Z P, et al. Distributed event-triggered control for cooperative output regulation of multiagent systems with an online estimation algorithm. IEEE Trans. on Cybernetics, 2020. DOI: 10.1109/TCYB.2020.2991761. |
| 15 |
YIN Y H, WANG F Y, LIU Z X, et al Finite/fixed-time consensus of nonlinear multi-agent systems against actuator faults and disturbances. Transactions of the Institute of Measurement and Control, 2020, 42 (16): 3254- 3266.
doi: 10.1177/0142331220949354 |
| 16 |
QIN J H, ZHANG G S, ZHENG W X, et al Neural network-based adaptive consensus control for a class of nonaffine nonlinear multiagent systems with actuator faults. IEEE Trans. on Neural Networks and Learning Systems, 2019, 30 (12): 3633- 3644.
doi: 10.1109/TNNLS.2019.2901563 |
| 17 | ZHOU X, GAO C, LI Z G, et al. Observer-based adaptive fuzzy finite-time prescribed performance tracking control for strict-feedback systems with input dead-zone and saturation. Nonlinear Dynamics, 2021. DOI: 202110.1007/s11071-020-06190-5. |
| 18 |
REN S Y, WANG Q, WANG J L Passivity-based finite-time synchronization of nonlinear multi-agent systems. IEEE Trans. on Network Science and Engineering, 2020, 7 (3): 1953- 1965.
doi: 10.1109/TNSE.2019.2963465 |
| 19 |
LI Y M, QU F Y, TONG S C Observer-based fuzzy adaptive finite-time containment control of nonlinear multiagent systems with input delay. IEEE Trans. on Cybernetics, 2021, 51 (1): 126- 137.
doi: 10.1109/TCYB.2020.2970454 |
| 20 | LI X Y, WANG J Z Fault-tolerant tracking control for a class of nonlinear multi-agent systems. Systems & Control Letters, 2020, 135, 104576. |
| 21 | WEN G H, HU G Q, ZUO Z Q, et al Robust containment of uncertain linear multi-agent systems under adaptive protocols. International Journal of Robust & Nonlinear Control, 2017, 27, 2053- 2069. |
| 22 | ZHANG X F, DONG J Admissible consensus of uncertain fractional-order singular multiagent systems with actuator fault. Journal of Vibration and Control, 2020, 27, 264- 276. |
| 23 | YAO L N, WU Y W Robust fault diagnosis and fault-tolerant control for uncertain multiagent systems. International Journal of Robust & Nonlinear Control, 2020, 30 (18): 8192- 8205. |
| 24 | WU L B, YANG G H, YE D Robust adaptive fault-tolerant control for linear systems with actuator failures and mismatched parameter uncertainties. IET Control Theory & Applications, 2014, 8 (6): 441- 449. |
| 25 | WANG X, YANG G H Cooperative adaptive fault-tolerant tracking control for a class of multi-agent systems with actuator failures and mismatched parameter uncertainties. IET Control Theory & Applications, 2015, 9 (8): 1274- 1284. |
| 26 | DENG C, WEN C Y. Distributed resilient observer-based fault-tolerant control for heterogeneous multi-agent systems under actuator faults and DoS attacks. IEEE Trans. on Control of Network Systems, 2020, 7(3): 1308−1318. |
| 27 | YE D, CHEN M, YANG H J. Distributed adaptive event-triggered fault-tolerant consensus of multiagent systems with general linear dynamics. IEEE Trans. on Cybernetics, 2019, 49(3): 757−767. |
| 28 | MU R, WEI A R, LI H T, et al. Leader-following consensus for multi-agent systems with actuator faults via adaptive event-triggered control. Journal of the Franklin Institute, 2021, 358(2): 1327−1349. |
| 29 | ZHAO L, YANG G H. Adaptive fault-tolerant control for nonlinear multi-agent systems with DoS attacks. Information Sciences, 2020, 526: 39−53. |
| 30 | XIAO S Y, DONG J X. Cooperative fault-tolerant fuzzy tracking control for nonlinear multiagent systems under directed network topology via a hierarchical control scheme. International Journal of Robust & Nonlinear Control, 2021, 31(2): 832−854. |
| 31 | LIU C, JIANG B, PATTON R J, et al. Decentralized output sliding-mode fault tolerant control for heterogeneous multiagent systems. IEEE Trans. on Cybernetics, 2020, 50(12): 4934−4945. |
| 32 | WANG X, YANG G H. Distributed reliable consensus control for a class of multi-agent systems under switching networks: a topology-based average dwell time approach. International Journal of Robust & Nonlinear Control, 2016, 26(13): 2767−2787. |
| 33 | WANG F Y, LIU Z X, CHEN Z Q. A novel leader-following consensus of multi-agent systems with smart leader. International Journal of Control Automation and Systems, 2018, 16: 1−10. |
| No related articles found! |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||