
Journal of Systems Engineering and Electronics ›› 2021, Vol. 32 ›› Issue (5): 1023-1030.doi: 10.23919/JSEE.2021.000087
• New Developments on FDD and FTC Techniques • Previous Articles Next Articles
Yuanyuan TU1,2( ), Dayi WANG2,*(), Wenbo LI1()
), Dayi WANG2,*(), Wenbo LI1()
Received:2020-12-31
Online:2021-10-18
Published:2021-11-04
Contact:
Dayi WANG
E-mail:tyyfti@163.com;dayiwang@163.com;liwenbo_bice@163.com
About author:Supported by:Yuanyuan TU, Dayi WANG, Wenbo LI. Reconfigurability evaluation method for input-constrained control systems[J]. Journal of Systems Engineering and Electronics, 2021, 32(5): 1023-1030.
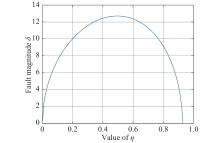
Fig 1
Additive fault magnitude δ with different η "
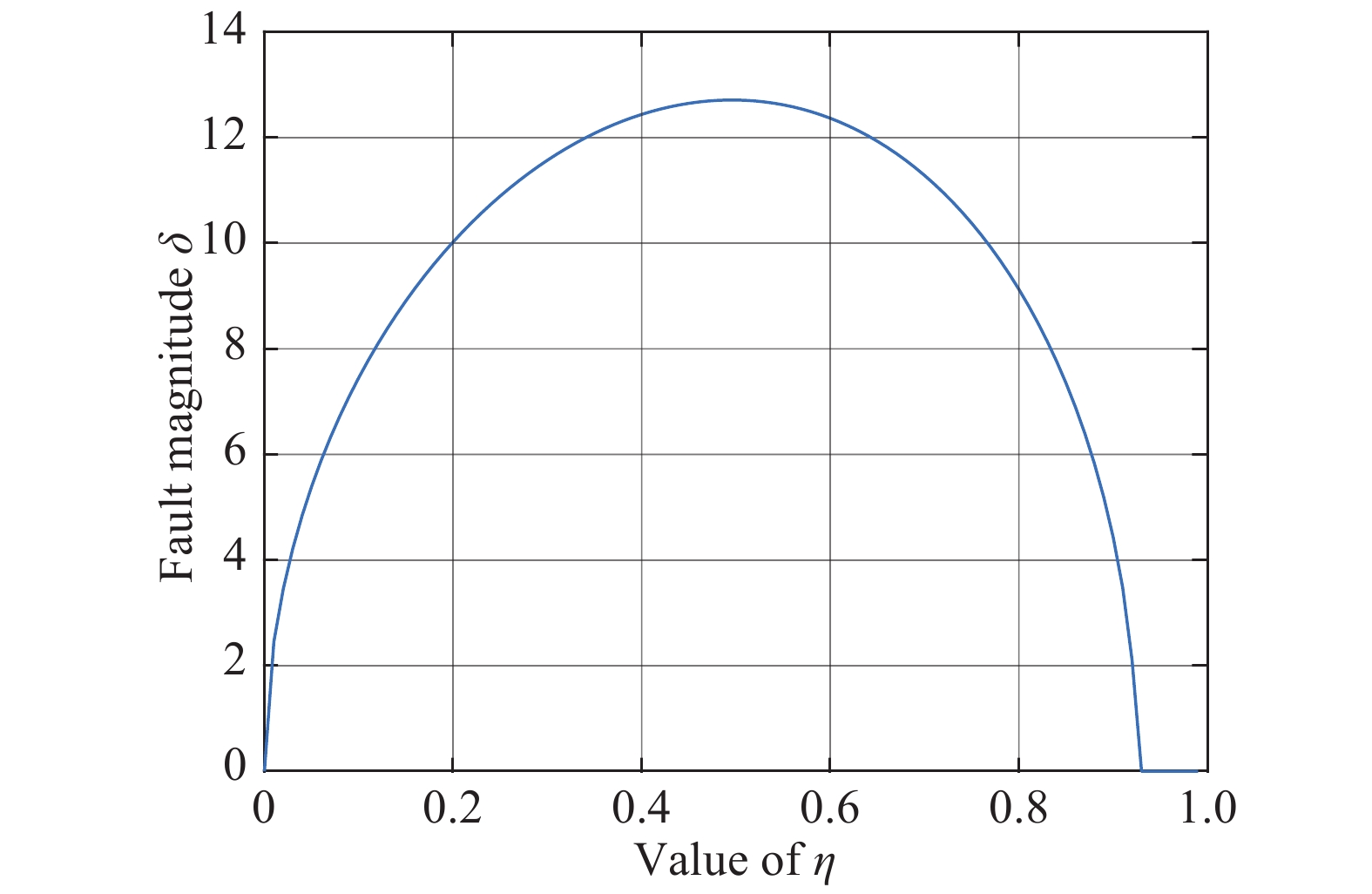
Fig 2
Inscribed radius ${{\boldsymbol{\alpha}} _{\bf{0}}}$ of the initial state domain with different ${\boldsymbol{\varepsilon}} _{\bf{\infty}} ^{}$ and ${\boldsymbol{\eta}}$ "
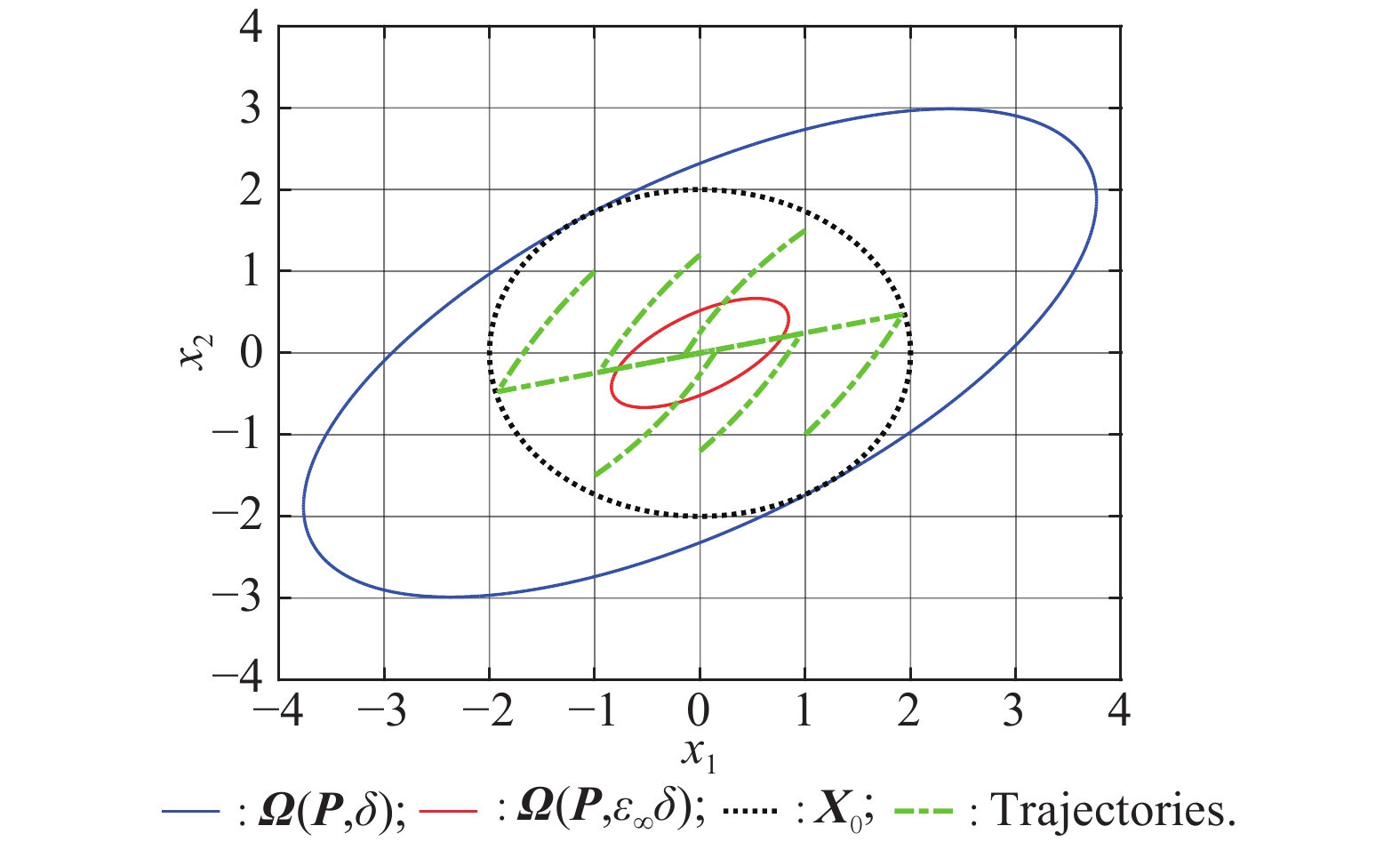
Fig 3
Estimated largest initial state domain"
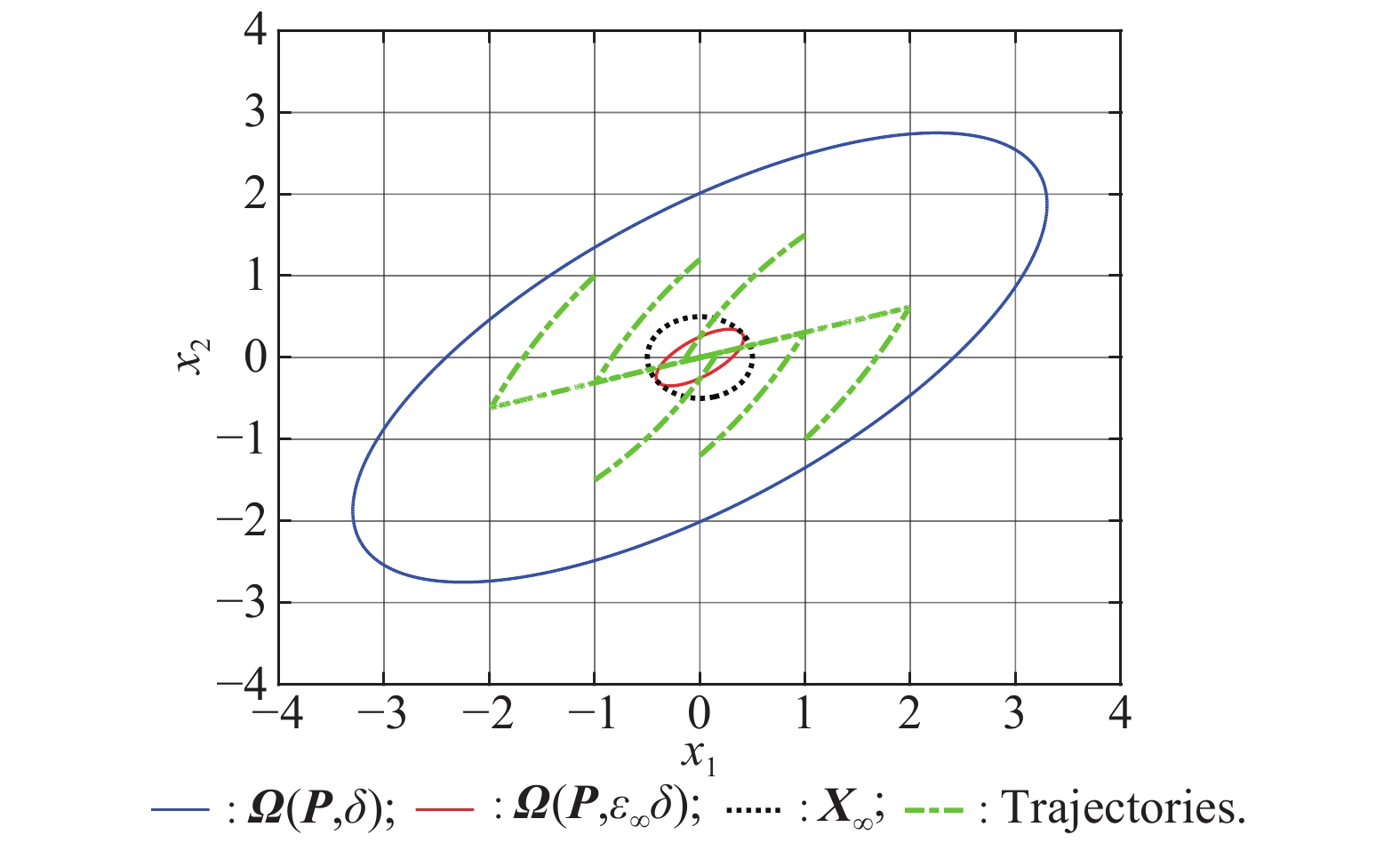
Fig 4
Estimated minimum final state domain"
| 1 |
JIANG B, STAROSWIECKI M, COCQUEMPOT V Fault accommodation for nonlinear dynamic systems. IEEE Trans. on Automatic Control, 2006, 51 (9): 1578- 1583.
doi: 10.1109/TAC.2006.878732 |
| 2 |
ZHANG Y, JIANG J Bibliographical review on reconfigurable fault-tolerant control systems. Annual Reviews in Control, 2008, 32 (2): 229- 252.
doi: 10.1016/j.arcontrol.2008.03.008 |
| 3 | ZOU W, AHN C K, XIANG Z. Fuzzy-approximation-based distributed fault-tolerant consensus for heterogeneous switched nonlinear multiagent systems. IEEE Trans. on Fuzzy Systems, 2021, 29(10): 2916−2925. |
| 4 |
LIANG Y W, XU S D Reliable control of nonlinear systems via variable structure scheme. IEEE Trans. on Automatic Control, 2006, 51 (10): 1721- 1726.
doi: 10.1109/TAC.2006.880802 |
| 5 |
STEFANOVSKI J D Passive fault tolerant perfect tracking with additive faults. Automatica, 2018, 87, 432- 436.
doi: 10.1016/j.automatica.2017.09.011 |
| 6 | YAO X, WU L, GUO L Disturbance-observer-based fault tolerant control of high-speed trains: a Markovian jump system model approach. IEEE Trans. on Systems, Man, and Cybernetics: Systems, 2018, 50 (4): 1- 10. |
| 7 |
LI L, LUO H, DING S X, et al Performance-based fault detection and fault-tolerant control for automatic control systems. Automatica, 2019, 99, 308- 316.
doi: 10.1016/j.automatica.2018.10.047 |
| 8 | ZHANG Y, JIANG J Integrated deisgn of reconfigurable fault-tolerant control systems. Journal of Guidance, Control, and Dynamics, 2012, 24 (1): 133- 136. |
| 9 | STAROSWIECKI M, GEHIN A L. Analysis of system reconfigurability using generic component models. Proc. of the UKACC International Conference on Control, 1998: 1157–1162. |
| 10 |
WU N E, ZHOU K, SALOMON G Control reconfigurability of linear time-invariant systems. Automatica, 2000, 36 (11): 1767- 1771.
doi: 10.1016/S0005-1098(00)00080-7 |
| 11 | GEHIN A L, STAROSWIECKI M Reconfiguration analysis using generic component models. IEEE Trans. on Systems, Man, and Cybernetics—Part A: Systems and Humans, 2011, 38 (3): 575- 583. |
| 12 | STAROSWIECKI M On reconfigurability with respect to actuator failures. IFAC Proceedings Volumes, 2002, 35 (1): 257- 262. |
| 13 |
HUANG J, WU N E Fault-tolerant placement of phasor measurement units based on control reconfigurability. Control Engineering Practice, 2013, 21 (1): 1- 11.
doi: 10.1016/j.conengprac.2012.09.001 |
| 14 | QIU Q, WU N E. Control reconfigurability-based placement strategy for facts devices. Proc. of American Control Conference, 2013. DOI:10.1109/ACC.2013.6580623. |
| 15 | SANJUAN A, NEJJARI F, SARRATE R. Reconfigurability analysis of multirotor UAVs under actuator faults. Proc. of the 4th Conference on Control and Fault Tolerant Systems, 2019: 26–31. |
| 16 | MACCOTTA M, LOVERA M. Reconfigurability analysis of multirotor UAVs. Proc. of the 5th CEAS Specialist Conference on Guidance, Navigation and Control, 2019: 1–21. |
| 17 |
HU T, LIN Z, CHEN B M An analysis and design method for linear systems subject to actuator saturation and disturbance. Automatica, 2002, 38 (2): 351- 359.
doi: 10.1016/S0005-1098(01)00209-6 |
| 18 |
MOORE B C Principal component analysis in linear systems: controllability, observability, and model reduction. IEEE Trans. on Automatic Control, 1981, 26 (1): 17- 32.
doi: 10.1109/TAC.1981.1102568 |
| 19 | FREI C W, KRAUS F J, BLANKET M. Recoverability viewed as a system property. Proc. of the European Control Conference, 1999: 2197–2202. |
| 20 | ZHOU K, DOYLE J C, GLOVER K. Robust and optimal control. New Jersey: Prentice-Hall, 1996. |
| 21 |
FANG H, LIN Z, HU T Analysis of linear systems in the presence of actuator saturation and L2-disturbances . Automatica, 2004, 40 (7): 1229- 1238.
doi: 10.1016/j.automatica.2004.02.009 |
| 22 | HINDI H, BOYD S. Analysis of linear systems with saturation using convex optimization. Proc. of the IEEE Conference on Decision & Control, 1998: 903–908. |
| [1] | Steven Xianchuan DING, Linlin LI, Bin JIANG. Unified control and detection framework and its applications: a review, some new results, and future perspectives [J]. Journal of Systems Engineering and Electronics, 2021, 32(5): 995-1013. |
| [2] | Sader MALIKA, Fuyong WANG, Zhongxin LIU, Zengqiang CHEN. Distributed fuzzy fault-tolerant consensus of leader-follower multi-agent systems with mismatched uncertainties [J]. Journal of Systems Engineering and Electronics, 2021, 32(5): 1031-1040. |
| [3] | Ziquan YU, Youmin ZHANG, Bin JIANG. PID-type fault-tolerant prescribed performance control of fixed-wing UAV [J]. Journal of Systems Engineering and Electronics, 2021, 32(5): 1053-1061. |
| [4] | Guangbin CAI, Yushan ZHAO, Yang ZHAO, Changhua HU. Consensus of multi-vehicle cooperative attack with stochastic multi-hop time-varying delay and actuator fault [J]. Journal of Systems Engineering and Electronics, 2021, 32(1): 228-242. |
| [5] | Enjiao ZHAO, Zenan ZHONG, Xin ZHENG. Finite-time control of formation system for multiple flight vehicles subject to actuator saturation [J]. Journal of Systems Engineering and Electronics, 2020, 31(5): 1019-1030. |
| [6] | Maopeng Ran, Qing Wang, Chaoyang Dong, and Maolin Ni. Simultaneous anti-windup synthesis for linear systems subject to actuator saturation [J]. Journal of Systems Engineering and Electronics, 2015, 26(1): 119-. |
| [7] | Haibin Sun, Shihua Li, and Changyin Sun. Adaptive fault-tolerant controller design for airbreathing hypersonic vehicle with input saturation [J]. Journal of Systems Engineering and Electronics, 2013, 24(3): 488-. |
| [8] | Yufei Xu, Bin Jiang, Zhifeng Gao, and Ke Zhang. Fault tolerant control for near space vehicle: a survey and some new results [J]. Journal of Systems Engineering and Electronics, 2011, 22(1): 88-94. |
| [9] | Fu Chen, Guangzhou Zhao, and Xiaoming Yu. Stabilizing model predictive control scheme for piecewise affine systems with maximal positively invariant terminal set [J]. Journal of Systems Engineering and Electronics, 2010, 21(6): 1090-1094. |
| [10] | Yanyan Yin and Fei Liu. Constrained predictive control of nonlinear stochastic systems [J]. Journal of Systems Engineering and Electronics, 2010, 21(5): 859-867. |
| [11] | Xiaodong Han1, 2,*, Jiangong Liu1, Dexiao Xie2, Dengfeng Zhang2, and Zhiquan Wan. Robust H∞ guaranteed cost satisfactory fault-tolerant control for discrete-time systems with quadratic D stabilizability [J]. Journal of Systems Engineering and Electronics, 2010, 21(3): 496-502. |
| [12] | Meng Lingya & Jiang Bin. Backstepping-based active fault-tolerant control for a class of uncertain SISO nonlinear systems? [J]. Journal of Systems Engineering and Electronics, 2009, 20(6): 1263-1270. |
| [13] | Huo Zhihong, Zhang Zhixue & Fang Huajing. Research on fault-tolerant control of networked control systems based on information scheduling [J]. Journal of Systems Engineering and Electronics, 2008, 19(5): 1024-1028. |
| [14] | Chen Xueqin, Geng Yunhai, Zhang Yingchun & Wang Feng. Fault-tolerant control of linear uncertain systems using H∞ robust predictive control [J]. Journal of Systems Engineering and Electronics, 2008, 19(3): 571-577. |
| [15] | Cui Ping, Weng Zhengxin, Patton Ron. Novel active fault-tolerant control scheme and its application to a double inverted pendulum system [J]. Journal of Systems Engineering and Electronics, 2008, 19(1): 134-140. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||