
Journal of Systems Engineering and Electronics ›› 2022, Vol. 33 ›› Issue (1): 180-187.doi: 10.23919/JSEE.2022.000018
• CONTROL THEORY AND APPLICATION • Previous Articles Next Articles
Xinjian MA( ), Shiqian LIU*(), Huihui CHENG()
), Shiqian LIU*(), Huihui CHENG()
Received:2020-12-22
Accepted:2021-11-10
Online:2022-01-18
Published:2022-02-22
Contact:
Shiqian LIU
E-mail:Espada@sjtu.edu.cn;liushiqian@sjtu.edu.cn;chenghh@sjtu.edu.cn
About author:Supported by:Xinjian MA, Shiqian LIU, Huihui CHENG. Civil aircraft fault tolerant attitude tracking based on extended state observers and nonlinear dynamic inversion[J]. Journal of Systems Engineering and Electronics, 2022, 33(1): 180-187.
Add to citation manager EndNote|Reference Manager|ProCite|BibTeX|RefWorks
Fig 1
Attitude control scheme"
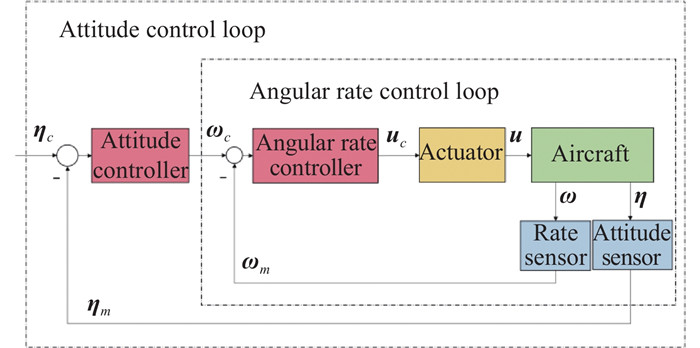
Fig 2
FTC design based on ESO and NDI"
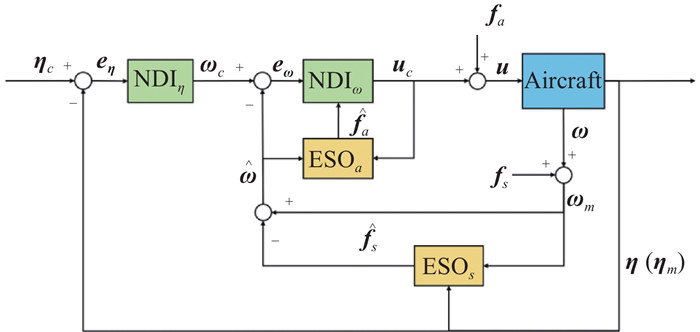
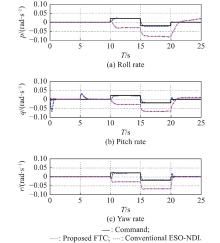
Fig 3
Angular rate tracking responses"
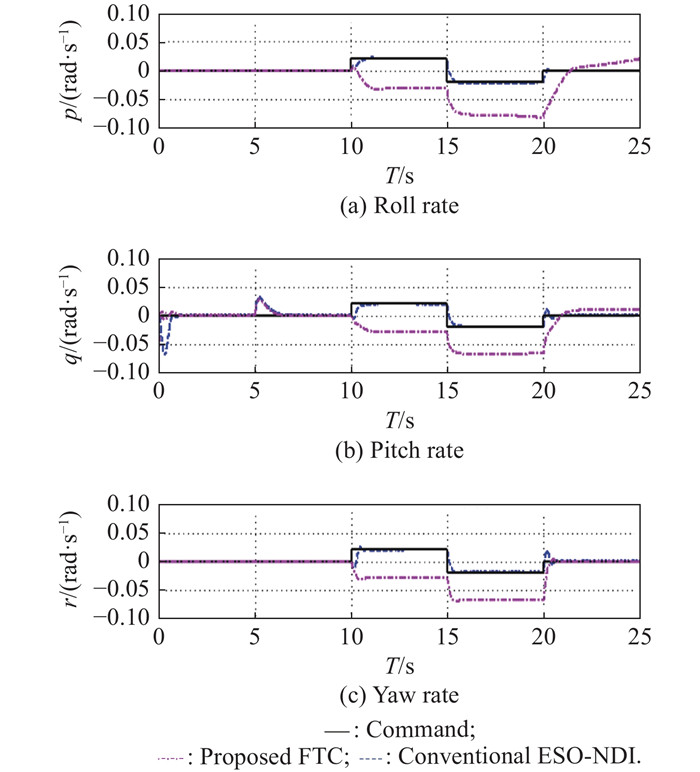
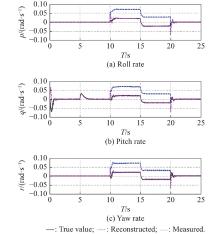
Fig 4
Angular rate signal reconstruction results"
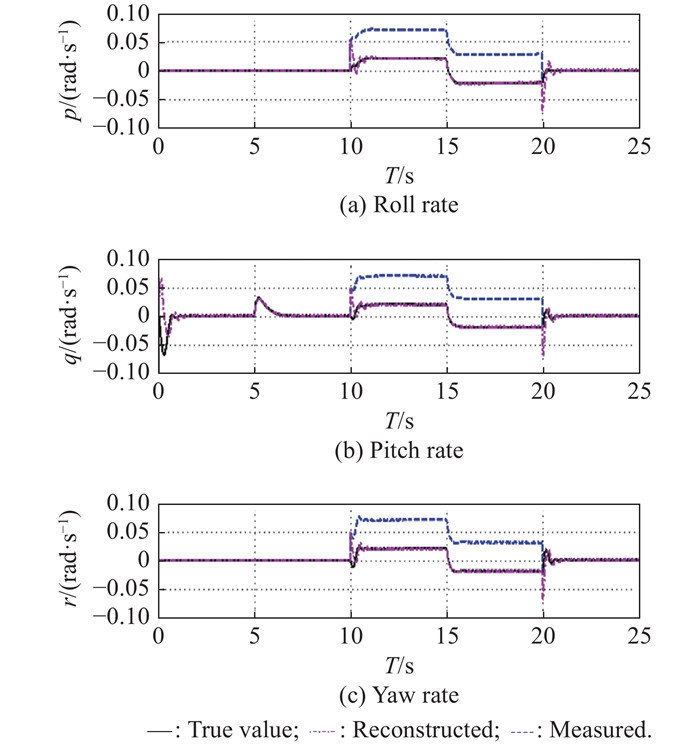
Fig 5
Attitude tracking response"
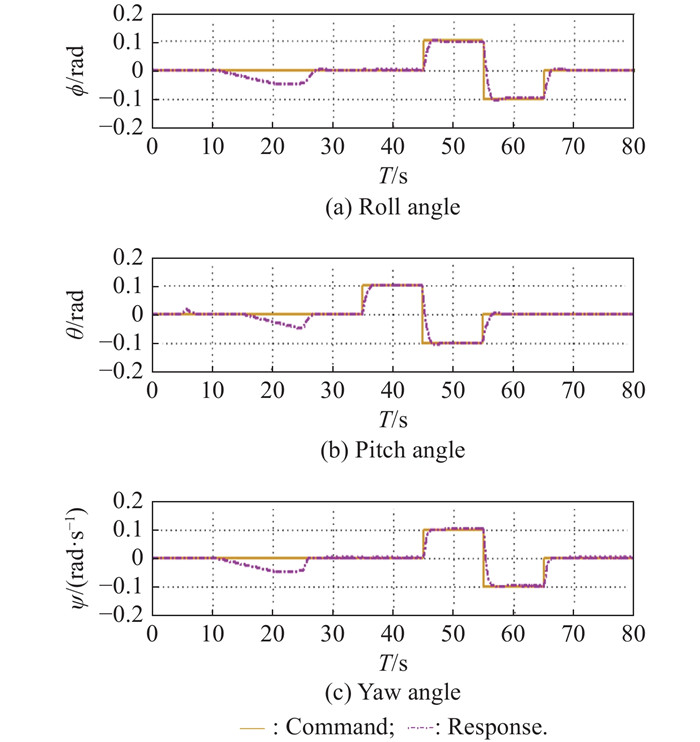
Fig 6
"
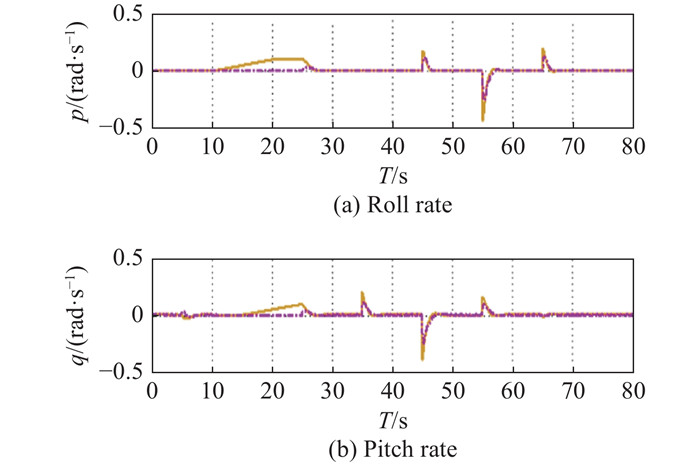
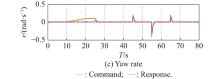
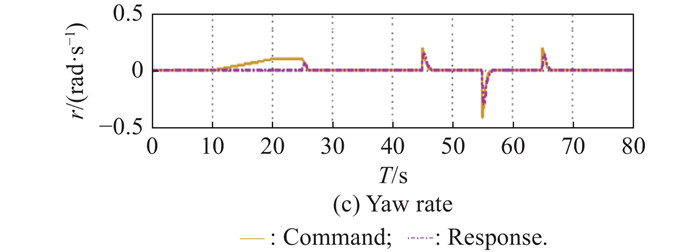
Fig 6
Angular rate tracking response"
| 1 | ALWI H, EDWARDS C An adaptive sliding mode differentiator for actuator oscillatory failure case reconstruction. Automatica, 2013, 49 (6): 642- 651. |
| 2 | ALWI H, EDWARDS C. Robust actuator fault reconstruction for LPV systems using sliding mode observers. Proc. of the IEEE Conference on Decision and Control, 2010: 84−89. |
| 3 | QUAN L. Sliding mode observer-based fault diagnosis for flight control systems. Nanjing: Nanjing University of Aeronautics and Astronautics, 2019. (in Chinese) |
| 4 | LU P, KAPEN E, VISSER C, et al. Aircraft fault-tolerant trajectory control using incremental nonlinear dynamic inversion. Control Engineering Practice, 2016, 57(9): 126−141. |
| 5 | CHENG H H, LIU S Q, MA X J Neural network incremental nonlinear dynamic inversion-based trajectory tracking control of an aircraft with pilot mishandling. Journal of Aeronautics, Astronautics and Aviation, 2021, 53 (1): 45- 58. |
| 6 | LEE H, SNYDER S, HOVAKIMYAN N. An adaptive unknown input observer for fault detection and isolation of aircraft actuator faults. Proc. of the American Institute of Aeronautics and Astronautics Guidance, Navigation, & Control Conference, 2015: 266−273. |
| 7 |
YU X, FU Y, ZHANG Y, et al Fault-tolerant aircraft control based on self-constructing fuzzy neural networks and multivariable SMC under actuator faults. IEEE Trans. on Fuzzy Systems, 2018, 26 (4): 2324- 2325.
doi: 10.1109/TFUZZ.2017.2773422 |
| 8 | WANG X D, LIU S Q, CHENG H H, et al Stable inversion based fault-tolerant trajectory tracking control of civil aircrafts autolanding. Journal of Aeronautics, Astronautics and Aviation, 2020, 52 (3): 229- 250. |
| 9 | LIU S Q, SANG Y J, WHIDBORNE J F Adaptive sliding-mode-backstepping trajectory tracking control of underactuated airships. Aerospace Science and Technology, 2020, 97 (1): 1- 13. |
| 10 |
XU X G, WEI Z Y, REN Z, et al Time-varying fault-tolerant formation tracking based cooperative control and guidance for multiple cruise missile systems under actuator failures and directed topologies. Journal of Systems Engineering and Electronics, 2019, 30 (3): 587- 600.
doi: 10.21629/JSEE.2019.03.16 |
| 11 |
XU X, JIANG Z, HU H S Cascade ADRC-based fault-tolerant control for a PVTOL aircraft with potential actuator failures. International Journal of Modelling Identification and Control, 2017, 28 (3): 212- 218.
doi: 10.1504/IJMIC.2017.086559 |
| 12 |
GUO Y Y, JIANG B, ZHANG Y M A novel robust attitude control for quadrotor aircraft subject to actuator faults and wind gusts. IEEE/CAA Journal of Automatica Sinica, 2018, 5 (1): 292- 230.
doi: 10.1109/JAS.2017.7510679 |
| 13 |
SHANG W, TANG S J, GUO J, et al Robust sliding mode control with ESO for dual-control missile. Journal of Systems Engineering and Electronics, 2016, 27 (5): 1073- 1082.
doi: 10.21629/JSEE.2016.05.15 |
| 14 | LI R H, LI T S, BU R X, et al Active disturbance rejection with sliding mode control based course and path following for underactuated ships. Mathematical Problems in Engineering, 2013, (13): 1- 9. |
| 15 | YAN K, CHEN M, WU Q X, et al. Extended state observer-based sliding mode fault-tolerant control for unmanned autonomous helicopter with wind gusts. IET Control Theory and Applications, 2019, 13(10): 1500−1513. |
| 16 | YUAN R Y, FAN G L, YI J Q. Robust attitude controller for unmanned aerial vehicle using dynamic inversion and extended state observer. Proc. of the 2nd International Conference on Intelligent Computation Technology and Automation, 2009: 850−853. |
| 17 | FALCONI G P, HEISE H D, HOLZAPFEL F. Fault-tolerant position tracking of a hexacopter using an extended state observer. Proc. of the 6th International Conference on Automation, Robotics and Applications, 2015: 550−556. |
| 18 | ERAZO C, ANGULO F, OLIVAR G Stability analysis of the extended state observers by Popov criterion. Theoretical & Applied Mechanics Letters, 2012, 2 (7): 306- 309. |
| 19 | GUO B Z, ZHAO Z L On the convergence of an extended state observer for nonlinear systems with uncertainty. System & Control Letters, 2011, 60 (4): 420- 430. |
| 20 | EDWARDS C, TAN C P Sensor fault tolerant control using sliding mode observers. Control Engineering Practice, 2006, 14 (7): 897- 908. |
| 21 | XIA J, XU J J. Observer-based Sensor Fault Detection and Signal Reconstruction Method. Journal of Beijing University of Aeronautics and Astronautics, 2013, 39(11): 1529−1535. (in Chinese) |
| 22 | JOHANSEN T A, CRISTOFARO A, SORENSEN K, et al. On estimation of wind velocity, angle-of-attack and sideslip angle of small UAVs using standard sensor. Proc. of the International Conference on Unmanned Aircraft Systems, 2015: 510−519. |
| 23 | LI P H. Research on sensor information reconfiguration of the flight control system. Xi’an, China: Northwestern Polytechnical University, 2014. (in Chinese) |
| 24 | CHEN F Y, NIU J, JIANG G Q Nonlinear fault-tolerant control for hypersonic flight vehicle with multi-sensor faults. IEEE Access, 2018, 6 (5): 427- 436. |
| 25 | YANG B J, SONG Z R. Reconfiguration of the Angle of Attack Signal in Disability of Sensors. Aeronautical Science & Technology, 2018, 29(8): 33-40. (in Chinese) |
| 26 | LU P, EYKEREN L V, KAMPEN E V, et al. Adaptive Three-Step Kalman Filter for Air Data Sensor Fault Detection and Diagnosis. Journal of Guidance Control & Dynamics, 2015. DOI: 10.251411.G001313. |
| 27 | LU P, KAMPEN E V, VISSER C D, et al Nonlinear aircraft sensor fault reconstruction in the presence of disturbances validated by real flight data. Control Engineering Practice, 2016, 49 (2): 112- 128. |
| 28 | LU P, KAMPEN E V, VISSER C D, et al Framework for simultaneous sensor and actuator fault-tolerant flight control. Journal of Guidance, Control, and Dynamics, 2017, 40 (8): 2127- 2135. |
| 29 | LIU S Q. Flight dynamics and control of modern aircrafts. 2nd Ed. Shanghai: Shanghai Jiao Tong University Press, 2018. (in Chinese) |
| 30 | VADIVELU P , LAKSHMANAN D , NAVEEN R, et al. Numerical study on longitudinal control of cessna 172 skyhawk aircraft by tail arm length. Proc. of the Institute of Physics Conference Series Materials Science and Engineering, 2020, 764(1): 012026. |
| [1] | Hang GUO, Zheng WANG, Bin FU, Kang CHEN, Wenxing FU, Jie YAN. Impact angle constrained fuzzy adaptive fault tolerant IGC method for Ski-to-Turn missiles with unsteady aerodynamics and multiple disturbances [J]. Journal of Systems Engineering and Electronics, 2022, 33(5): 1210-1226. |
| [2] | Zhiyuan SHEN, Qianqian WANG, Xinmiao CHENG. A sparsity adaptive compressed signal reconstruction based on sensing dictionary [J]. Journal of Systems Engineering and Electronics, 2021, 32(6): 1345-1353. |
| [3] | Yiru ZOU, Chunsheng LIU, Ke LU. Extended state observer based smooth switching control for tilt-rotor aircraft [J]. Journal of Systems Engineering and Electronics, 2020, 31(4): 815-825. |
| [4] | Ligang GONG, Qing WANG, Chaoyang DONG. Switching disturbance rejection attitude control of near space vehicles with variable structure [J]. Journal of Systems Engineering and Electronics, 2019, 30(1): 167-179. |
| [5] | Yuhang YUN, Shengjing TANG, Jie GUO, Wei SHANG. Robust controller design for compound control missile with fixed bounded convergence time [J]. Journal of Systems Engineering and Electronics, 2018, 29(1): 116-133. |
| [6] | Aibing QIU, Jing ZHANG, Bin JIANG, Juping GU. Event-triggered sampling and fault-tolerant control co-design based on fault diagnosis observer [J]. Journal of Systems Engineering and Electronics, 2018, 29(1): 176-186. |
| [7] | Wei Shang, Shengjing Tang, Jie Guo, Yueyue Ma, and Yuhang Yun. Robust sliding mode control with ESO for dual-control missile [J]. Journal of Systems Engineering and Electronics, 2016, 27(5): 1073-1082. |
| [8] | Yueyue Ma, Jie Guo, and Shengjing Tang. BTT autopilot design for agile missiles with aerodynamic uncertainty [J]. Journal of Systems Engineering and Electronics, 2015, 26(4): 802-. |
| [9] | Xunhong Lv, Bin Jiang, Ruiyun Qi, and Jing Zhao. Survey on nonlinear reconfigurable flight control [J]. Journal of Systems Engineering and Electronics, 2013, 24(6): 971-983. |
| [10] | Zakwan Skaf, Hong Wang, and Lei Guo. Fault tolerant control based on stochastic distribution via RBF neural networks [J]. Journal of Systems Engineering and Electronics, 2011, 22(1): 63-69. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||