
Journal of Systems Engineering and Electronics ›› 2023, Vol. 34 ›› Issue (1): 197-213.doi: 10.23919/JSEE.2022.000132
• CONTROL THEORY AND APPLICATION • Previous Articles Next Articles
Jing LUO1,2, Qianchao LIANG1, Hao LI2,*( )
)
Received:2021-02-18
Accepted:2022-07-15
Online:2023-02-18
Published:2023-03-03
Contact:
Hao LI
E-mail:afeu_li@163.com
About author:Supported by:Jing LUO, Qianchao LIANG, Hao LI. UAV penetration mission path planning based on improved holonic particle swarm optimization[J]. Journal of Systems Engineering and Electronics, 2023, 34(1): 197-213.
Add to citation manager EndNote|Reference Manager|ProCite|BibTeX|RefWorks
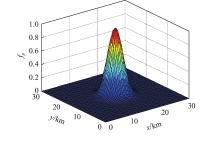
Fig 1
Three-dimensional mountain peak threat probability model"
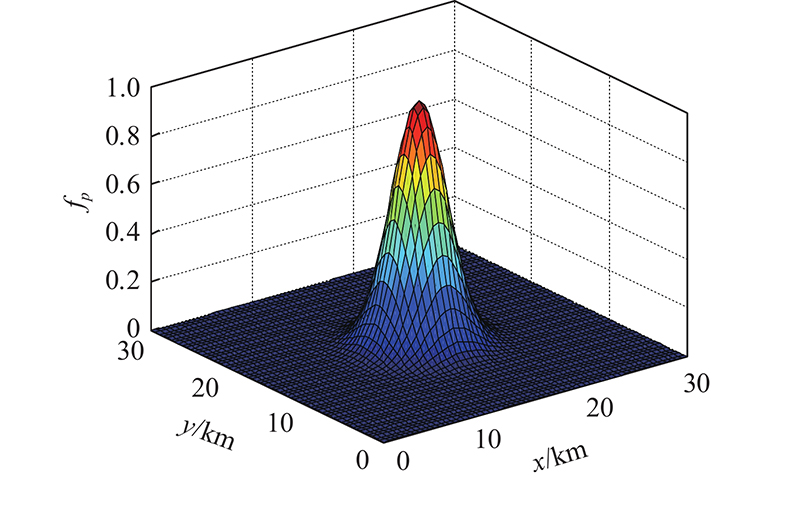
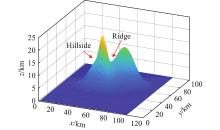
Fig 2
Schematic diagram of combined mountain"
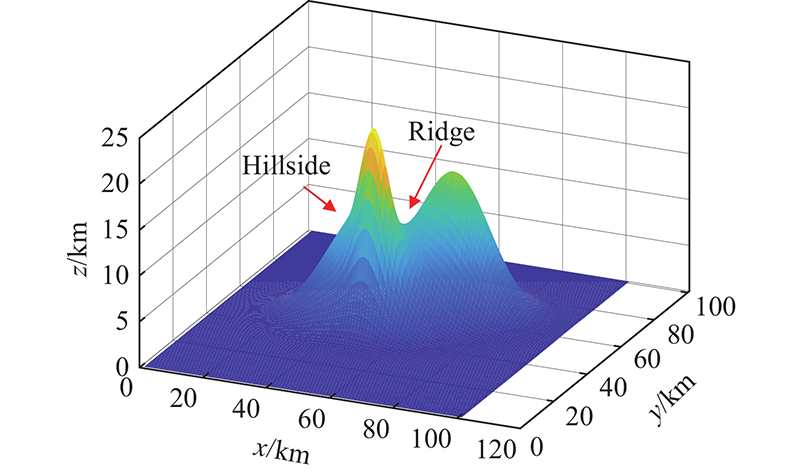

Fig 3
Schematic diagram of random surface"

Fig 4
Global height formation process"

Fig 5
Height line smoothing process"
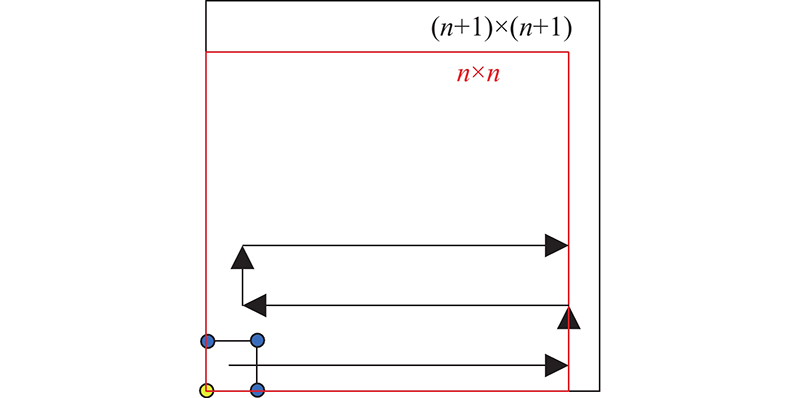
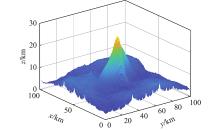
Fig 6
Surface height map after smoothing"
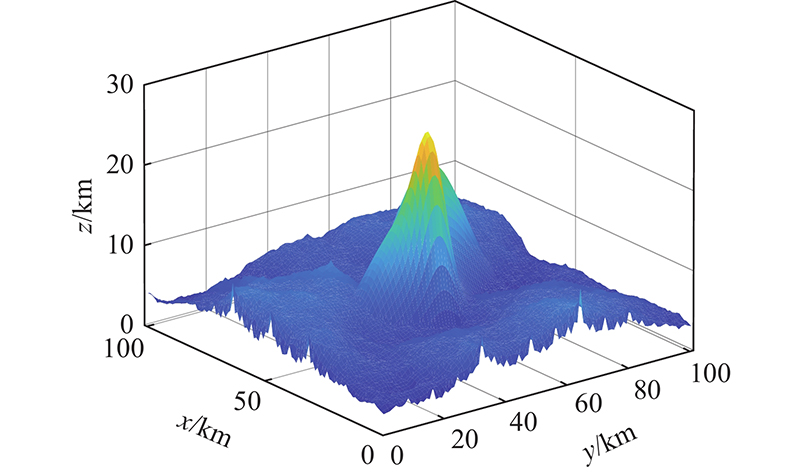

Fig 7
Space situation map of UAV and networking radar"
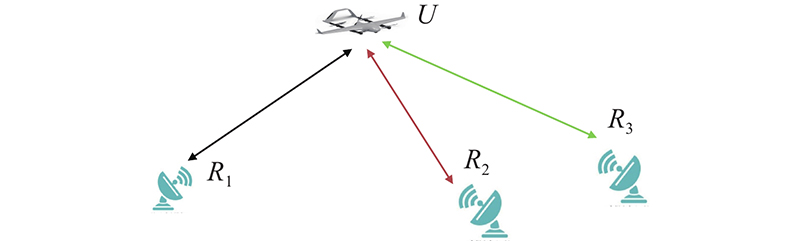
Fig 8
UAV model and body coordinate definition"
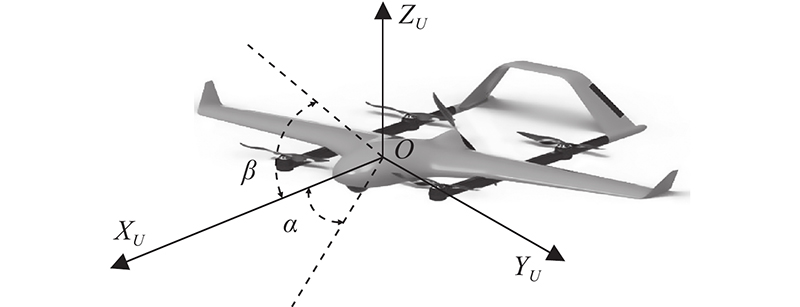
Fig 9
RCS distribution of UAVs at different pitch angles"
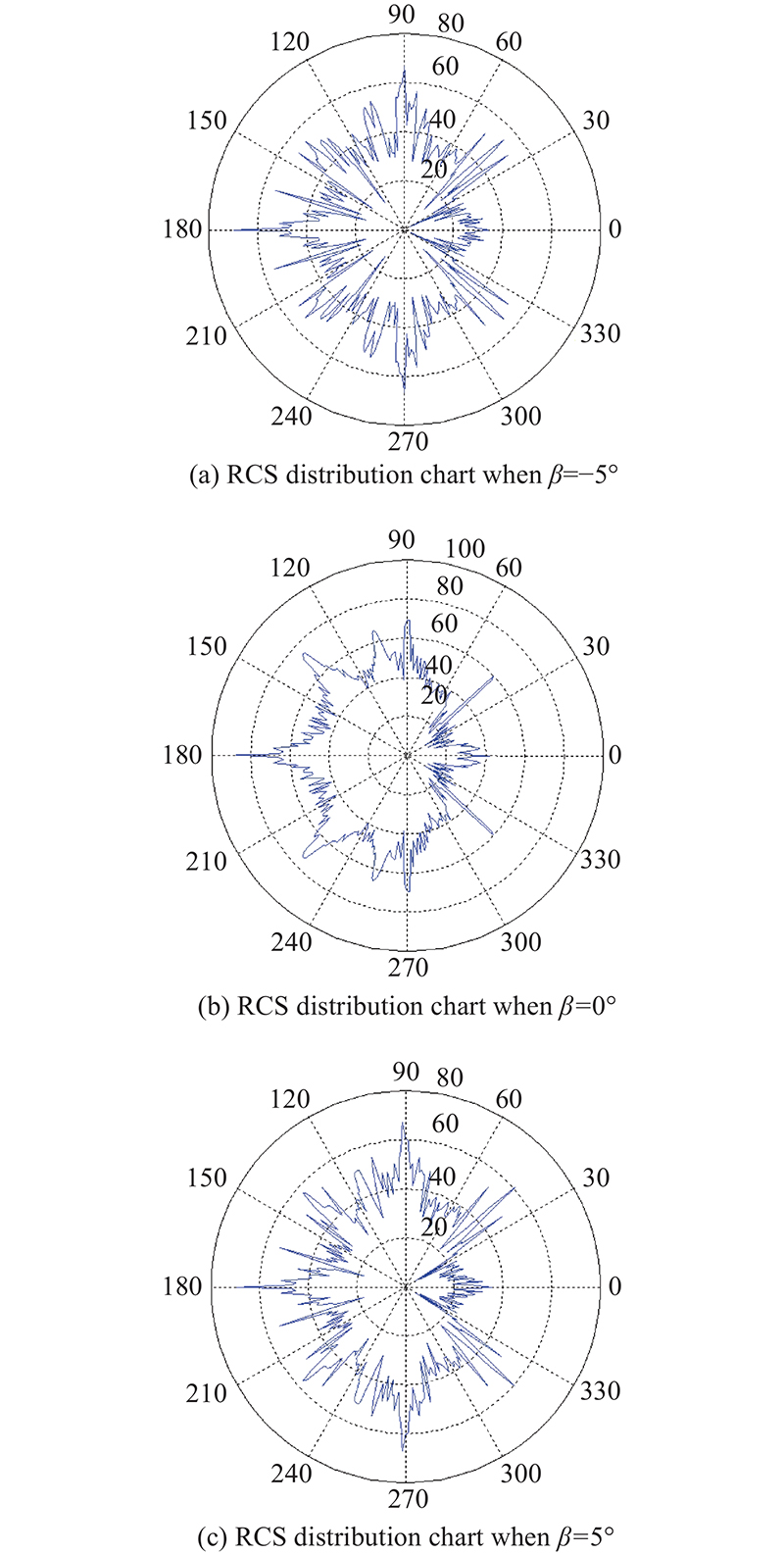
Fig 10
HPSO algorithm flow"
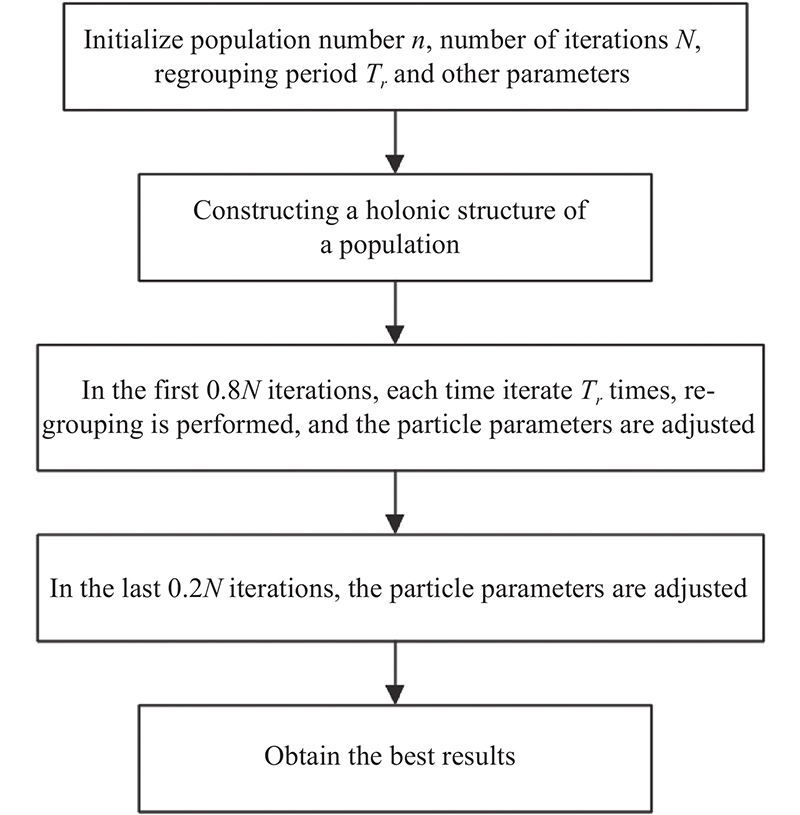
Table 1
Grouping and search strategy combination"
| Scheme | First stage extensive search | Second stage accurate search |
| Scheme 1 | System clustering method | System clustering method |
| Scheme 2 | Information entropy method | Information entropy method |
| Scheme 3 | System clustering method | Information entropy method |
| Scheme 4 | Information entropy method | System clustering method |
Fig 11
IHPSO algorithm flow"
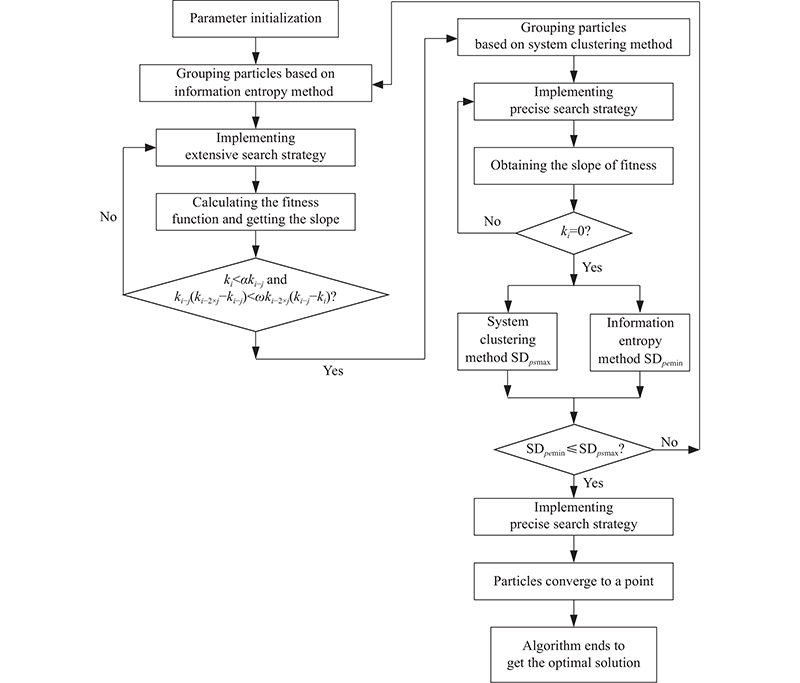
Fig 12
Track planning process based on IHPSO algorithm"
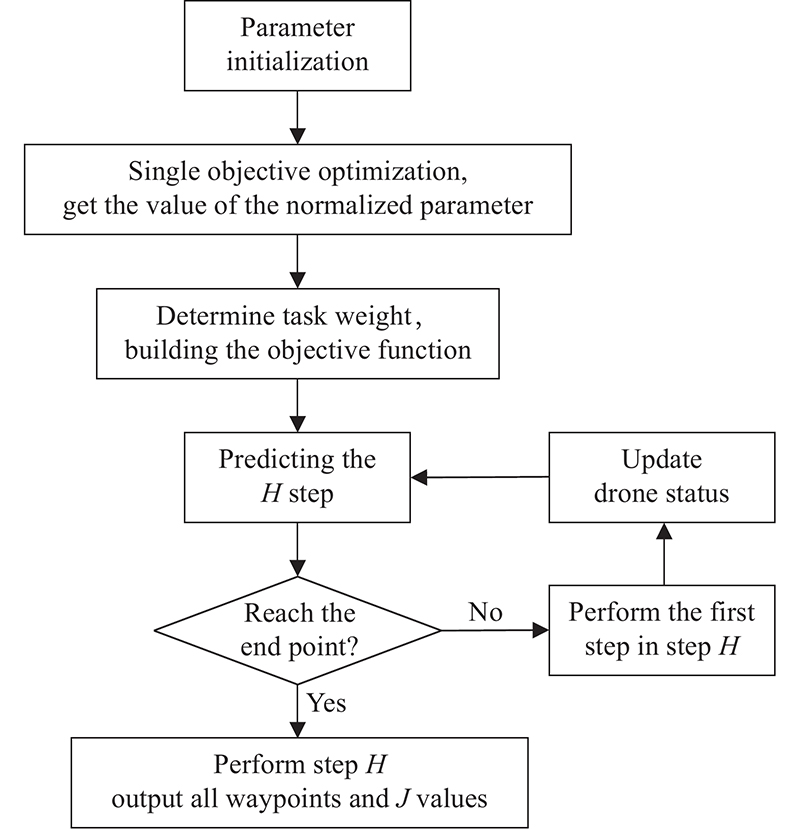
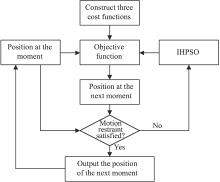
Fig 13
Algorithm logic diagram"
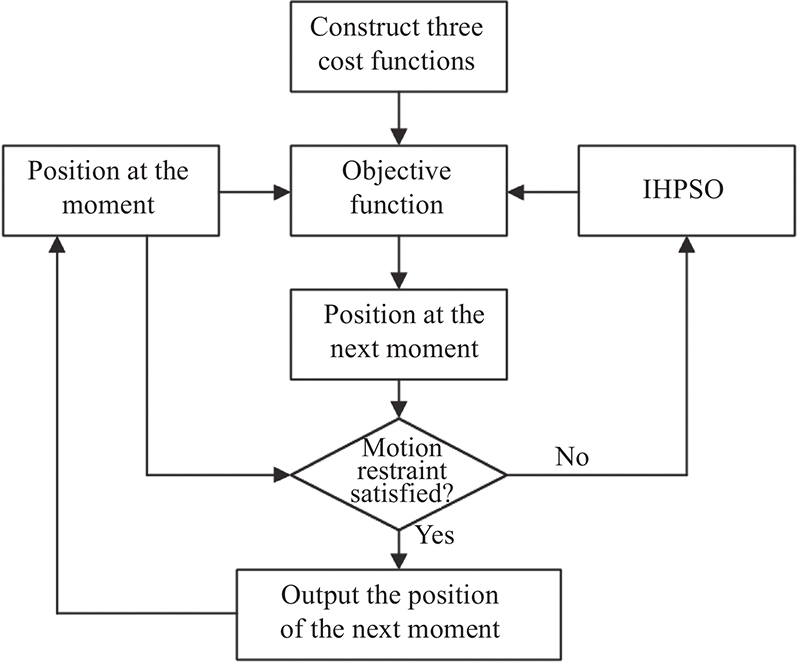
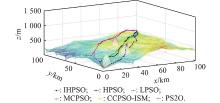
Fig 14
Comparison of track planning (ωe=0.3, ωr=0.4, ωs=0.3) "
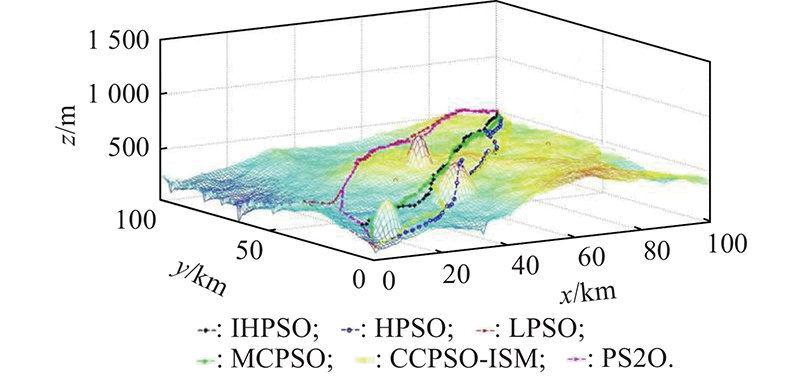
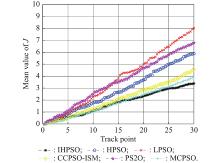
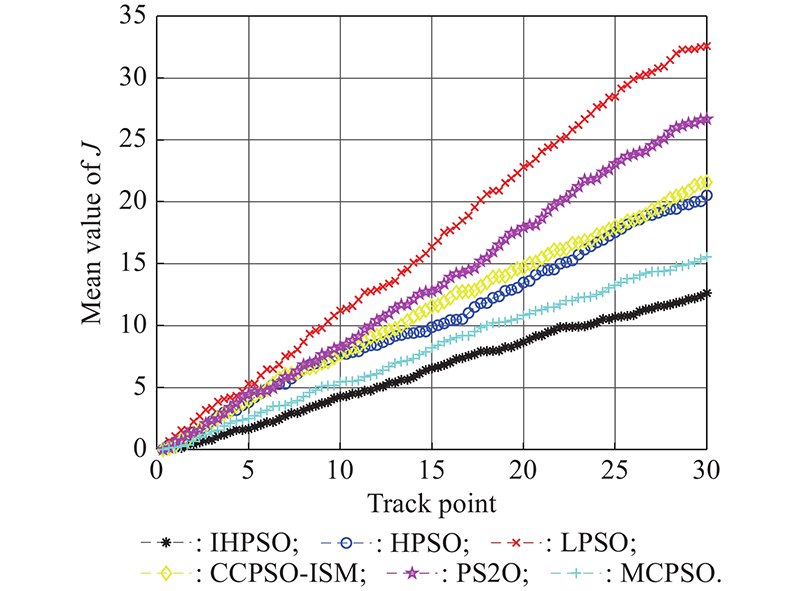
Fig 15
Relationship between the mean value of the objective function J and the track points (ωe =0.3, ωr=0.4, ωs=0.3) "
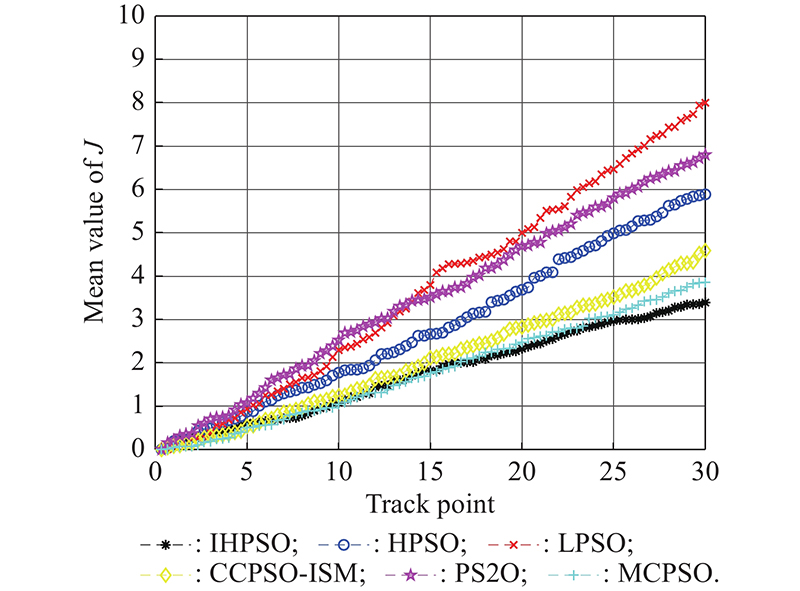
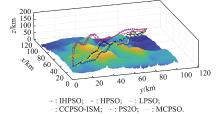
Fig 16
Comparison of track planning (ωe =0.3, ωr=0.5, ωs=0.2) "
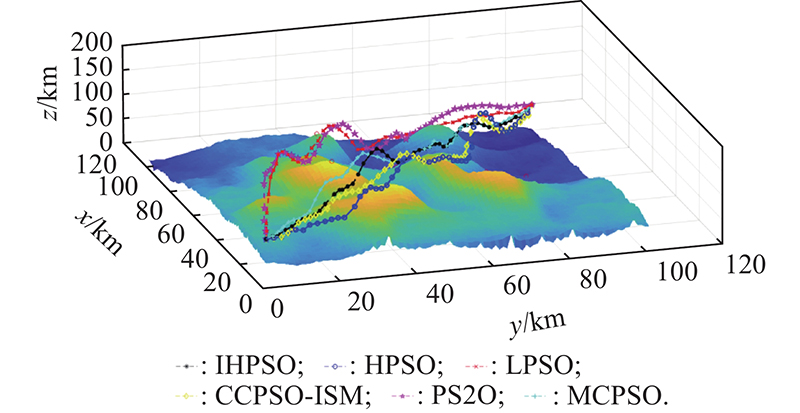
Fig 17
Top view of track planning"
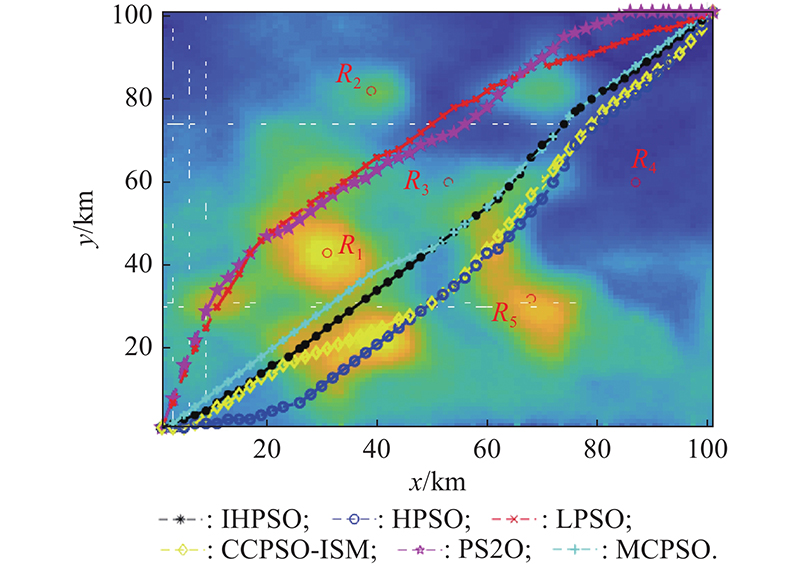
Fig 18
Relationship between the mean value of the objective function J and the track points (ωe =0.3, ωr=0.4, ωs=0.3) "
| 1 |
WANG L, LIU Z, CHEN C L P, et al A UKF-based predictable SVR learning controller for biped walking. IEEE Trans. on Systems, Man, and Cybernetics: Systems, 2013, 43 (6): 1440- 1450.
doi: 10.1109/TSMC.2013.2242887 |
| 2 |
WANG H C, WANG J L, DING G R, et al Completion time minimization with path planning for fixed-wing UAV communications. IEEE Trans. on Wireless Communications, 2019, 18 (7): 3485- 3499.
doi: 10.1109/TWC.2019.2914203 |
| 3 |
ZHANG H D, HE Y Q, LI D C, et al Marine UAV-USV marsupial platform: system and recovery technic verification. Applied Sciences, 2020, 10 (5): 1583.
doi: 10.3390/app10051583 |
| 4 |
MARDANI A, CHIABERGE M, GIACCONE P Communication-aware UAV path planning. IEEE Access, 2019, 7, 52609- 52621.
doi: 10.1109/ACCESS.2019.2911018 |
| 5 |
CHUANG H M, HE D, NAMIKI A Autonomous target tracking of UAV using high-speed visual feedback. Applied Sciences, 2019, 9 (21): 4552.
doi: 10.3390/app9214552 |
| 6 | GIUSTI A, GUZZI J, CIRESAN D C, et al A machine learning approach to visual perception of forest trails for mobile robots. IEEE Robotics and Automation Letters, 2015, 1 (2): 661- 667. |
| 7 | WANG J G, WANG Y F, ZHANG J M, et al Resolution calculation and analysis in bistatic SAR with geostationary illuminator. IEEE Geoscience and Remote Sensing Letters, 2012, 10 (1): 194- 198. |
| 8 |
YANG P, TANG K, LOZANO J A, et al Path planning for single unmanned aerial vehicle by separately evolving waypoints. IEEE Trans. on Robotics, 2015, 31 (5): 1130- 1146.
doi: 10.1109/TRO.2015.2459812 |
| 9 |
VAN NGUYEN H, REZATOFIGHI H, VO B N, et al Online UAV path planning for joint detection and tracking of multiple radio-tagged objects. IEEE Trans. on Signal Processing, 2019, 67 (20): 5365- 5379.
doi: 10.1109/TSP.2019.2939076 |
| 10 |
KUMAR P, GARG S, SINGH A, et al MVO-based 2-D path planning scheme for providing quality of service in UAV environment. IEEE Internet of Things Journal, 2018, 5 (3): 1698- 1707.
doi: 10.1109/JIOT.2018.2796243 |
| 11 | LIU Y S, WANG Q X, HU H S, et al A novel real-time moving target tracking and path planning system for a quadrotor UAV in unknown unstructured outdoor scenes. IEEE Trans. on Systems, Man, and Cybernetics: Systems, 2018, 49 (11): 2362- 2372. |
| 12 |
GALCERAN E, CARRERAS M A survey on coverage path planning for robotics. Robotics and Autonomous Systems, 2013, 61 (12): 1258- 1276.
doi: 10.1016/j.robot.2013.09.004 |
| 13 |
LIU C, ZHANG S H, AKBAR A Ground feature oriented path planning for unmanned aerial vehicle mapping. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2019, 12 (4): 1175- 1187.
doi: 10.1109/JSTARS.2019.2899369 |
| 14 |
WU Z Y, LI J H, ZUO J M, et al Path planning of UAVs based on collision probability and Kalman filter. IEEE Access, 2018, 6, 34237- 34245.
doi: 10.1109/ACCESS.2018.2817648 |
| 15 |
WAI R J, PRASETIA A S Adaptive neural network control and optimal path planning of UAV surveillance system with energy consumption prediction. IEEE Access, 2019, 7, 126137- 126153.
doi: 10.1109/ACCESS.2019.2938273 |
| 16 |
LI Y, CHEN H, ER M J, et al Coverage path planning for UAVs based on enhanced exact cellular decomposition method. Mechatronics, 2011, 21 (5): 876- 885.
doi: 10.1016/j.mechatronics.2010.10.009 |
| 17 |
SUN Z C, WU J J, YANG J Y, et al Path planning for GEO-UAV bistatic SAR using constrained adaptive multiobjective differential evolution. IEEE Trans. on Geoscience and Remote Sensing, 2016, 54 (11): 6444- 6457.
doi: 10.1109/TGRS.2016.2585184 |
| 18 |
LEVIN J M, NAHON M, PARANJAPE A A Real-time motion planning with a fixed-wing UAV using an agile maneuver space. Autonomous Robots, 2019, 43, 2111- 2130.
doi: 10.1007/s10514-019-09863-2 |
| 19 |
ZHU M N, ZHANG X H, LUO H, et al Optimization dubins path of multiple UAVs for post-earthquake rapid-assessment. Applied Sciences, 2020, 10 (4): 1388.
doi: 10.3390/app10041388 |
| 20 | SUN L L, CAO Y H, WU W H, et al A multi-target tracking algorithm based on Gaussian mixture model. Journal of Systems Engineering and Electronics, 2020, 31 (3): 482- 487. |
| 21 |
QIE H, SHI D X, SHEN T L, et al Joint optimization of multi-UAV target assignment and path planning based on multi-agent reinforcement learning. IEEE Access, 2019, 7, 146264- 146272.
doi: 10.1109/ACCESS.2019.2943253 |
| 22 | YUE W, GUAN X H, WANG L Y. A novel searching method using reinforcement learning scheme for multi-UAVs in unknown environments. Applied Sciences 2019, 9(22): 4964. |
| 23 | ZHANG W. Coarse-to-fine UAV target tracking with deep reinforcement learning. IEEE Trans. on Automation Science and Engineering 2018, 16(4): 1522−1530. |
| 24 |
DUAN H B, LI P, SHI Y H, et al Interactive learning environment for bio-inspired optimization algorithms for UAV path planning. IEEE Trans. on Education, 2015, 58 (4): 276- 281.
doi: 10.1109/TE.2015.2402196 |
| 25 |
YANG Q, YOO S J Optimal UAV path planning: sensing data acquisition over IoT sensor networks using multi-objective bio-inspired algorithms. IEEE Access, 2018, 6, 13671- 13684.
doi: 10.1109/ACCESS.2018.2812896 |
| 26 |
SHAO Z Path planning for multi-UAV formation rendezvous based on distributed cooperative particle swarm optimization. Applied Sciences, 2019, 9 (13): 2621.
doi: 10.3390/app9132621 |
| 27 | ROBERGE V, TARBOUCHI M, LABONTE G Comparison of parallel genetic algorithm and particle swarm optimization for real-time UAV path planning. IEEE Trans. on Industrial Informatics, 2012, 9 (1): 132- 141. |
| 28 |
WANG Y B, BAI P, LIANG X L, et al Reconnaissance mission conducted by UAV swarms based on distributed PSO path planning algorithms. IEEE Access, 2019, 7, 105086- 105099.
doi: 10.1109/ACCESS.2019.2932008 |
| 29 | ROSHANZAMIE M, BALAFAR M A, RAZAVI S N Empowering particle swarm optimization algorithm using multi agents ’ capability: a holonic approach. Knowledge-Based Systems, 2017, 136 (11): 58- 74. |
| 30 |
ZENGIN U, DOGAN A Real-time target tracking for autonomous UAVs in adversarial environments: a gradient search algorithm. IEEE Trans. on Robotics, 2007, 23 (2): 294- 307.
doi: 10.1109/TRO.2006.889490 |
| 31 | GILLES L On determining the flyability of airplane rectilinear trajectories at constant velocity. Advances in Aircraft and Spacecraft Science, 2018, 5 (5): 551- 579. |
| 32 | LIU L, QU G Q, KONG W UAV 3D trajectory planning by using dynamic programming and potential theory. Computer Engineering and Applications, 2013, 49 (20): 235- 239. |
| 33 | SUGANTHAN P N Particle swarm optimiser with neighbourhood operator. Proc. of the Congress on Evolutionary Computation, 1999, 3, 1958- 1962. |
| 34 |
CHEN H N, ZHU Y L Optimization based on symbiotic multi-species coevolution. Applied Mathematics and Computation, 2008, 205 (1): 47- 60.
doi: 10.1016/j.amc.2008.05.148 |
| 35 | NIU B, ZHU Y L, HE X X Multi-population cooperative particle swarm optimization. Proc. of the European Conference on Artificial Life, 2005, 874- 883. |
| 36 | LI Y, ZHAN Z H, LIN S, et al Competitive and cooperative particle swarm optimization with information sharing mechanism for global optimization problems. Information Sciences, 2015, 293 (2): 370- 382. |
| [1] | Lanyong ZHANG, Ruixuan ZHANG. Research on UAV cloud control system based on ant colony algorithm [J]. Journal of Systems Engineering and Electronics, 2022, 33(4): 805-811. |
| [2] | Gang LIU, Zhibiao AN, Songyang LAO, Wu LI. Firepower distribution method of anti-ship missile based on coupled path planning [J]. Journal of Systems Engineering and Electronics, 2022, 33(4): 1010-1024. |
| [3] | Alireza MOHSENI, Vincent DUCHAINE, Tony WONG. Experimental study of path planning problem using EMCOA for a holonomic mobile robot [J]. Journal of Systems Engineering and Electronics, 2021, 32(6): 1450-1462. |
| [4] | Zhen XU, Enze ZHANG, Qingwei CHEN. Rotary unmanned aerial vehicles path planning in rough terrain based on multi-objective particle swarm optimization [J]. Journal of Systems Engineering and Electronics, 2020, 31(1): 130-141. |
| [5] | Qiming YANG, Jiandong ZHANG, Guoqing SHI. Modeling of UAV path planning based on IMM under POMDP framework [J]. Journal of Systems Engineering and Electronics, 2019, 30(3): 545-554. |
| [6] | Zhenxing ZHANG, Rennong YANG, Huanyu LI, Yuhuan FANG, Zhenyu HUANG, Ying ZHANG. Antlion optimizer algorithm based on chaos search and its application [J]. Journal of Systems Engineering and Electronics, 2019, 30(2): 352-365. |
| [7] | Xiaoxuan Hu, Yanhong Liu, and Guoqiang Wang. Optimal search for moving targets with sensing capabilities using multiple UAVs [J]. Systems Engineering and Electronics, 2017, 28(3): 526-535. |
| [8] | Yani Cui, Jia Ren, Wencai Du, and Jingguo Dai. UAV target tracking algorithm based on task allocation consensus [J]. Journal of Systems Engineering and Electronics, 2016, 27(6): 1207-1218. |
| [9] | Mingyong Liu, Baogui Xu, and Xingguang Peng. Cooperative path planning for multi-AUV in time-varying ocean flows [J]. Systems Engineering and Electronics, 2016, 27(3): 612-618. |
| [10] | Xiang Gao, Yangwang Fang, and Youli Wu. Fuzzy Q learning algorithm for dual-aircraft path planning to cooperatively detect targets by passive radars [J]. Journal of Systems Engineering and Electronics, 2013, 24(5): 800-810. |
| [11] | Yuxing Mao, Ching Y. Suen, and Wei He. Extraction of affine invariant features for shape recognition based on ant colony optimization [J]. Journal of Systems Engineering and Electronics, 2011, 22(6): 1003-1009. |
| [12] | Xin Liu, Chengping Zhou, and Mingyue Ding. 3D multipath planning for UAV based on network graph [J]. Journal of Systems Engineering and Electronics, 2011, 22(4): 640-646. |
| [13] | Wang Lingxiao & Zhou Deyun. Effective path planning method for low detectable aircraft [J]. Journal of Systems Engineering and Electronics, 2009, 20(4): 784-789. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||