
Journal of Systems Engineering and Electronics ›› 2024, Vol. 35 ›› Issue (1): 186-194.doi: 10.23919/JSEE.2023.000111
• CONTROL THEORY AND APPLICATION • Previous Articles
Jianping ZHOU1,2( ), Wenjie ZHANG3,*(), Hang ZHOU1(), Qiang LI4(), Qunli XIA1()
), Wenjie ZHANG3,*(), Hang ZHOU1(), Qiang LI4(), Qunli XIA1()
Received:2022-03-14
Online:2024-02-18
Published:2024-03-05
Contact:
Wenjie ZHANG
E-mail:6043105@qq.com;l013763956@qq.com;1797779122@qq.com;liqiang2568837@126.com;1010@bit.edu.cn
About author:Jianping ZHOU, Wenjie ZHANG, Hang ZHOU, Qiang LI, Qunli XIA. Design of integral sliding mode guidance law based on disturbance observer[J]. Journal of Systems Engineering and Electronics, 2024, 35(1): 186-194.
Add to citation manager EndNote|Reference Manager|ProCite|BibTeX|RefWorks

Fig 1
Missile-target relative motion in the longitudinal plane"
Table 1
Parameters of missile"
| Variable | Value |
| 600 | |
| 300 | |
| 0 | |
| 0 | |
| 40 | |
| 4330 | |
| 2500 | |
| 0 | |
| 0.5 | |
| 20 |
Table 2
Comparison among the simulation results"
| Guidance law | |||
| ISMGL | 13.38 | 0.38 | 19.95 |
| LSMGL | 13.32 | 0.45 | 19.90 |
| TSGL | 13.62 | 7.1 | 179 |
| ISMGL | 16.72 | 0.42 | 20.03 |
| LSMGL | 16.58 | 0.58 | 20.06 |
| TSGL | 16.38 | 16.0 | -68 |
Fig 2
Relative motion curves between the missile and target"
Fig 3
Curves of the line-of-sight angle"
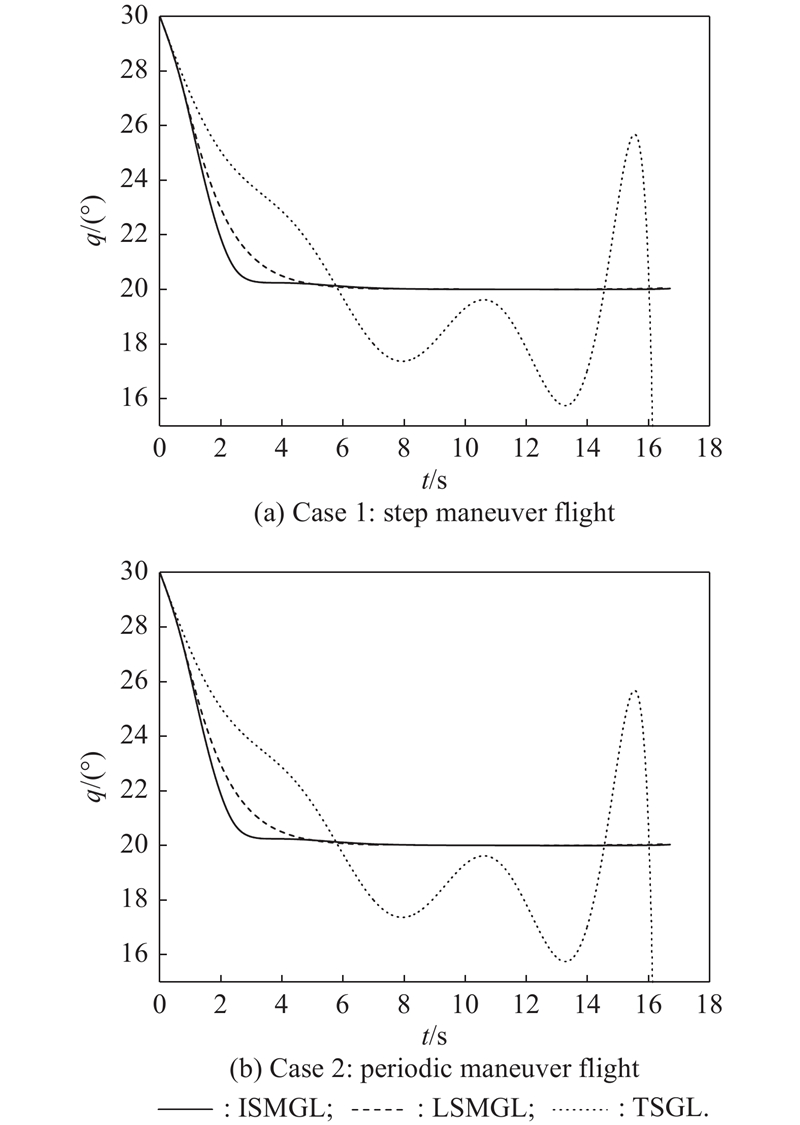
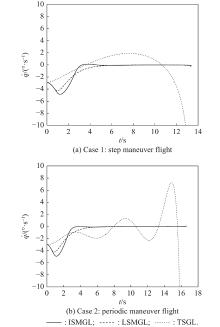
Fig 4
Curves of line-of-sight angle rate"
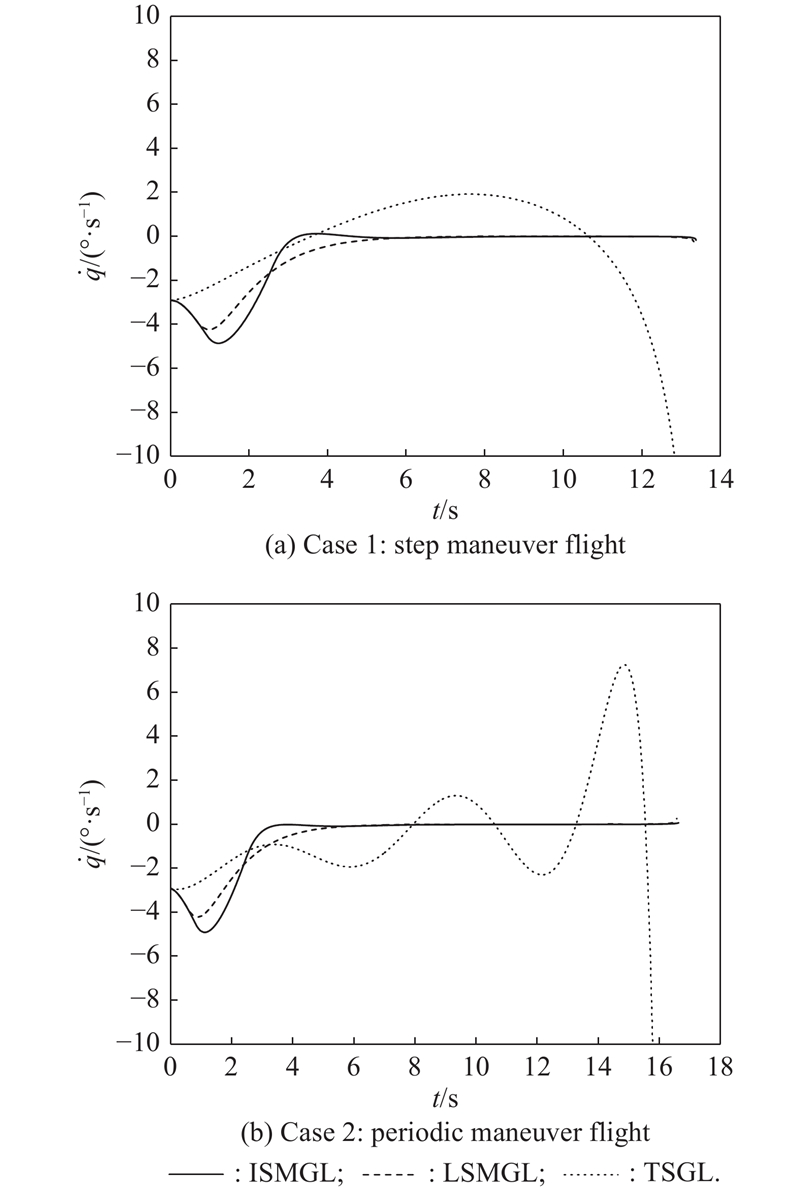
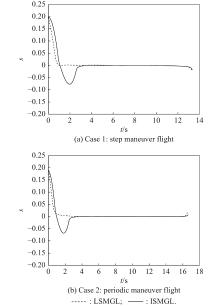
Fig 5
Curves of the sliding mode surface"
Fig 6
ISMGL curves of the normal overload"
Fig 7
LSMGL curves of the normal overload"
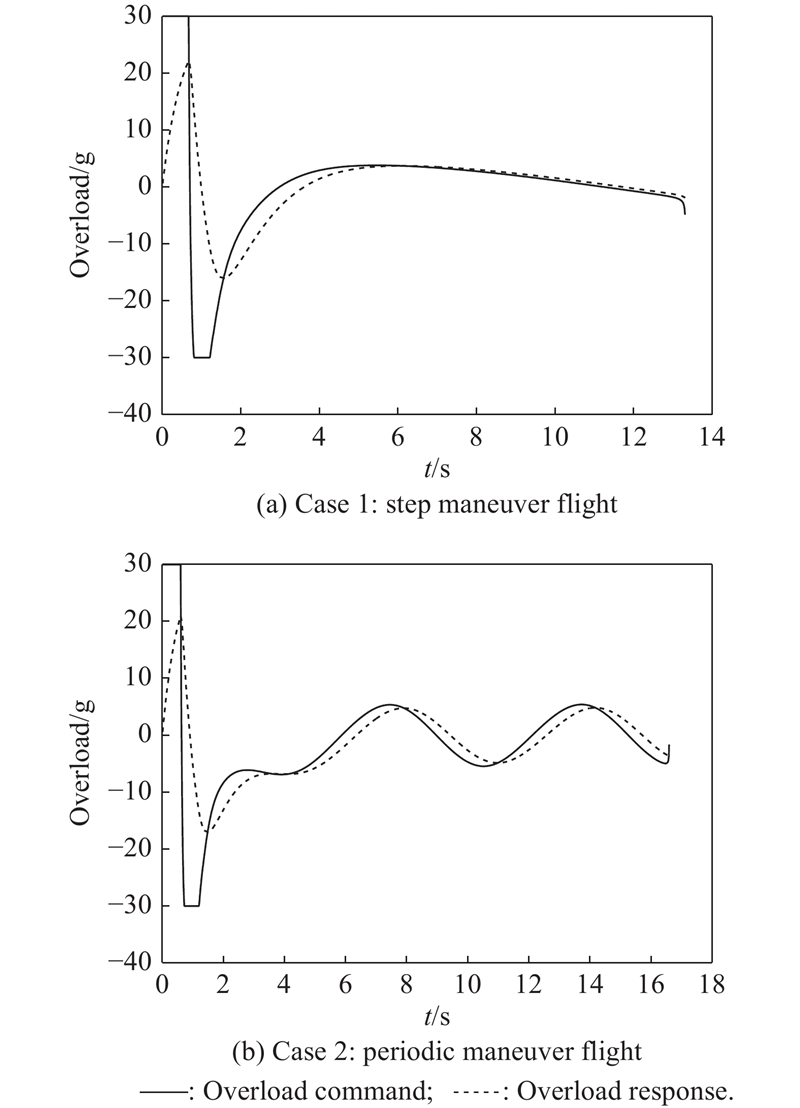
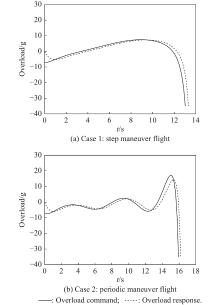
Fig 8
TSGL curves of the normal overload"
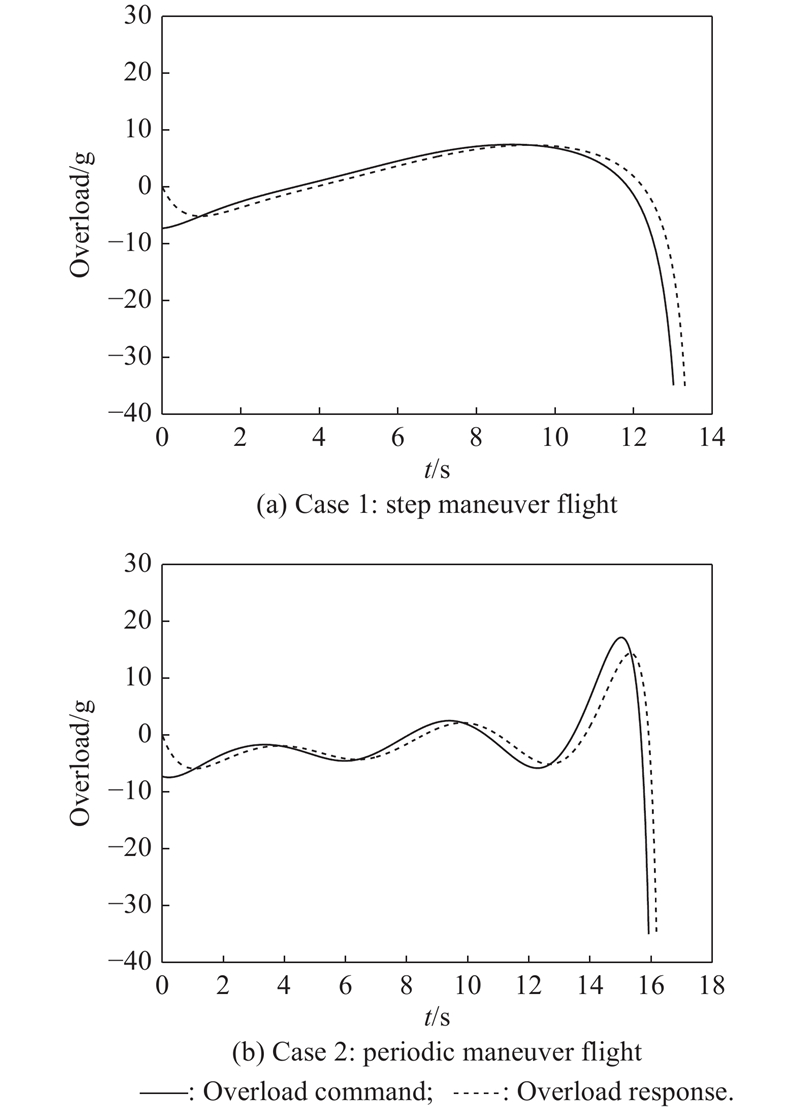
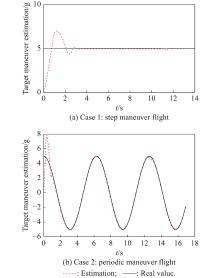
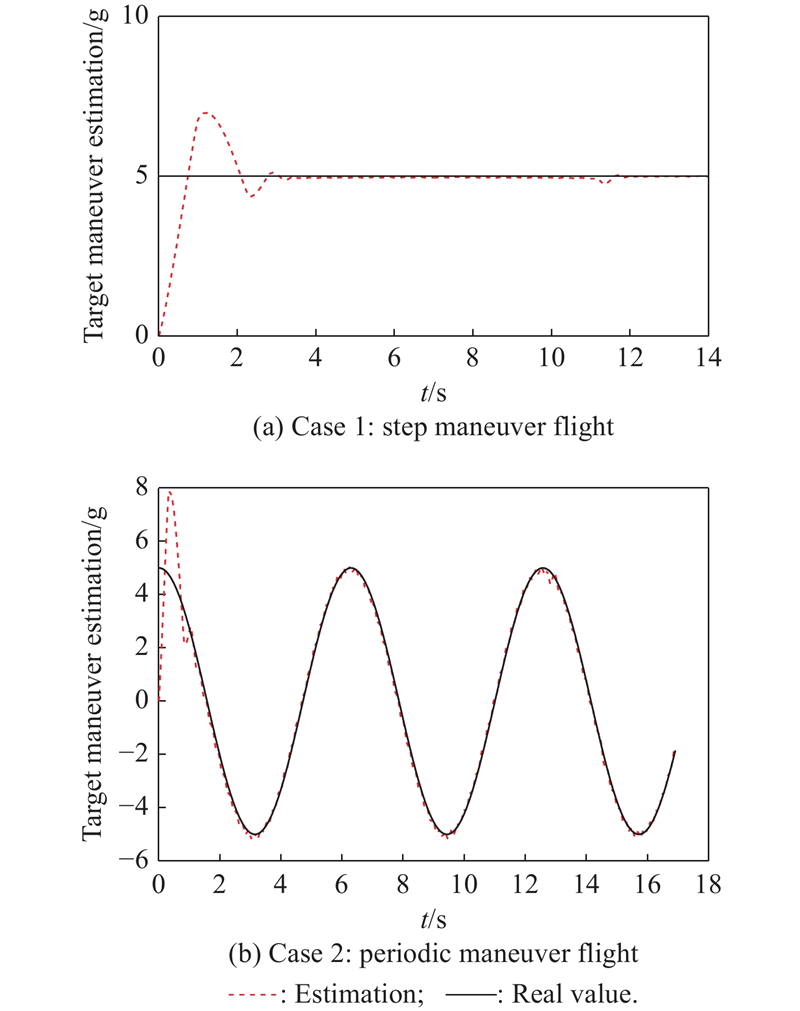
Fig 9
Target maneuvers estimation"
| 1 | MA K M, HE F H, YAO Y Estimation of target maneuver acceleration and guidance law implementation in homing terminal guidance. Journal of Astronautics, 2009, 30 (6): 2213- 2219. |
| 2 |
KIM B S, LEE J G, HAN H S Biased PNG law for impact with angular constraint. IEEE Trans. on Aerospace and Electronic Systems, 1998, 34 (1): 277- 288.
doi: 10.1109/7.640285 |
| 3 | HE S, LEE C H. Optimality of error dynamics in missile guidance problems. Journal of Guidance Control and Dynamics, 2018, 41(7): 1624−1633. |
| 4 |
LIU X F, SHEN Z J, LU P Closed-loop optimization of guidance gain for constrained impact. Journal of Guidance Control and Dynamics, 2017, 40 (2): 453- 460.
doi: 10.2514/1.G000323 |
| 5 | LI W, WEN Q Q, HE L, et al Three-dimensional impact angle constrained distrubuted cooperative guidance law for anti-ship missiles. Journal of Systems Engineering and Electronics, 2021, 32 (2): 447- 459. |
| 6 | ERER K S, OZGOREN M K. Control of impact angle using biased proportional navigation. Proc. of the AIAA Guidance Navigation, and Control Conference, 2013. DOI: 10.2514/6.2013-5113. |
| 7 | FU S N, ZHOU G Q, XIA Q L A trajectory shaping guidance law with field-of-view angle constraint and terminal limits. Journal of Systems Engineering and Electronics, 2022, 33 (2): 426- 437. |
| 8 | ERER K S, TEKIN R, OZGOREN M K. Biased proportional navigation with exponentially decaying error for impact angle control and path following. Proc. of the 24th Mediterranean Conference on Control and Automation, 2016: 238−243. |
| 9 |
KIM T H, LEE C H, JEON I S, et al Augmented polynomial guidance with impact time and angle constraints. IEEE Trans. on Aerospace and Electronic Systems, 2013, 49 (4): 2806- 2817.
doi: 10.1109/TAES.2013.6621856 |
| 10 |
ERER K S, TEKON R Impact time and angle control based on constrained optimal solutions. Journal of Guidance Control and Dynamics, 2016, 39 (10): 2448- 2454.
doi: 10.2514/1.G000414 |
| 11 | FU S N, WANG L, XIA Q L Trajectory optimization of a reentry vehicle based on artificial emotion memory optimization. Journal of Systems Engineering and Electronics, 2021, 32 (3): 668- 680. |
| 12 | QIAN X F, LIN R X, ZHAO Y A. Missile flight mechanics. Beijing: Beijing Institute of Technology Press, 2000. |
| 13 | ZHANG Y, GUO J, TANG S J, et al. A novel sliding mode guidance law with impact angle constraint for maneuvering target interception. Acta Armamentarii, 2015, 36(8): 1443−1457. |
| 14 | WANG X F, ZHENG Y Y, LIN H Sliding mode guidance law with impact angle constraint based on disturbance observer. Systems Engineering and Electronics, 2014, 36 (1): 111- 116. |
| 15 | HE S M. Research on sliding mode control-based precise guidance technology. Beijing: Beijing Institute of Technology, 2015. (in Chinese) |
| 16 | ZHOU H B. Study on guidance law and cooperative guidance for multi-missiles based on finite-time and sliding mode theory. Harbin: Harbin Institute of Technology, 2015. (in Chinese) |
| 17 |
YU S H, YU X H, SHIRINZADEH B Continuous finite-time control for robotic manipulators with terminal sliding mode. Automatica, 2005, 41 (11): 1957- 1964.
doi: 10.1016/j.automatica.2005.07.001 |
| 18 | LEVANT A Higher-order sliding modes: differentiation and output-feedback control. International Journal of Control, 2003, 76 (9): 427- 434. |
| [1] | Xiaolong CHEN, Jian GUAN, Jibin ZHENG, Yue ZHANG, Xiaohan YU. Radar fast long-time coherent integration via TR-SKT and robust sparse FRFT [J]. Journal of Systems Engineering and Electronics, 2023, 34(5): 1116-1129. |
| [2] | Zhuanhua ZHANG, Gongjian ZHOU. Maneuvering target state estimation based on separate modeling of target trajectory shape and dynamic characteristics [J]. Journal of Systems Engineering and Electronics, 2022, 33(5): 1195-1209. |
| [3] | Hang GUO, Zheng WANG, Bin FU, Kang CHEN, Wenxing FU, Jie YAN. Impact angle constrained fuzzy adaptive fault tolerant IGC method for Ski-to-Turn missiles with unsteady aerodynamics and multiple disturbances [J]. Journal of Systems Engineering and Electronics, 2022, 33(5): 1210-1226. |
| [4] | Shengnan FU, Guanqun ZHOU, Qunli XIA. A trajectory shaping guidance law with field-of-view angle constraint and terminal limits [J]. Journal of Systems Engineering and Electronics, 2022, 33(2): 426-437. |
| [5] | Fuhui GUO, Pingli LU. Fast self-adapting high-order sliding mode control for a class of uncertain nonlinear systems [J]. Journal of Systems Engineering and Electronics, 2021, 32(3): 690-699. |
| [6] | Wei LI, Qiuqiu WEN, Lei HE, Qunli XIA. Three-dimensional impact angle constrained distributed cooperative guidance law for anti-ship missiles [J]. Journal of Systems Engineering and Electronics, 2021, 32(2): 447-459. |
| [7] | Hongyin SHI, Yue LIU, Jianwen GUO, Mingxin LIU. ISAR autofocus imaging algorithm for maneuvering targets based on deep learning and keystone transform [J]. Journal of Systems Engineering and Electronics, 2020, 31(6): 1178-1185. |
| [8] | Zhen SHI, Yaen XIE, Chengchen DENG, Kun ZHAO, Yushan HE, Yong HAO. Disturbance observer based finite-time coordinated attitude tracking control for spacecraft on SO(3) [J]. Journal of Systems Engineering and Electronics, 2020, 31(6): 1274-1285. |
| [9] | Biao YANG, Wuxing JING, Changsheng GAO. Three-dimensional cooperative guidance law for multiple missiles with impact angle constraint [J]. Journal of Systems Engineering and Electronics, 2020, 31(6): 1286-1296. |
| [10] | Zhichao BAO, Qiuxi JIANG, Fangzheng LIU. Multiple model efficient particle filter based track-before-detect for maneuvering weak targets [J]. Journal of Systems Engineering and Electronics, 2020, 31(4): 647-656. |
| [11] | Gongguo XU, Ganlin SHAN, Xiusheng DUAN. Sensor scheduling for ground maneuvering target tracking in presence of detection blind zone [J]. Journal of Systems Engineering and Electronics, 2020, 31(4): 692-702. |
| [12] | Wenjie ZHANG, Shengnan FU, Wei LI, Qunli XIA. An impact angle constraint integral sliding mode guidance law for maneuvering targets interception [J]. Journal of Systems Engineering and Electronics, 2020, 31(1): 168-184. |
| [13] | Hongwei ZHANG, Weixin XIE. Constrained auxiliary particle filtering for bearings-only maneuvering target tracking [J]. Journal of Systems Engineering and Electronics, 2019, 30(4): 684-695. |
| [14] | Tianqing CHANG, Quandong WANG, Lei ZHANG, Na HAO, Wenjun DAI. Battlefield dynamic scanning and staring imaging system based on fast steering mirror [J]. Journal of Systems Engineering and Electronics, 2019, 30(1): 37-56. |
| [15] | Jingshuai HUANG, Hongbo ZHANG, Guojian TANG, Weimin BAO. Extended differential geometric guidance law for intercepting maneuvering targets [J]. Journal of Systems Engineering and Electronics, 2018, 29(5): 1046-1057. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||