
Journal of Systems Engineering and Electronics ›› 2023, Vol. 34 ›› Issue (6): 1409-1418.doi: 10.23919/JSEE.2023.000140
• AUTONOMOUS DECISION AND COOPERATIVE CONTROL OF UAV SWARMS • Previous Articles Next Articles
Jianhong WANG1,*( ), RAMIREZ-MENDOZA Ricardo A.1(), Yang XU2()
), RAMIREZ-MENDOZA Ricardo A.1(), Yang XU2()
Received:2022-11-07
Online:2023-12-18
Published:2023-12-29
Contact:
Jianhong WANG
E-mail:wang.jiahong@tec.mx;ricardo.ramirez@tec.mx;yang.xu@nwpu.edu.cn
About author:Supported by:Jianhong WANG, RAMIREZ-MENDOZA Ricardo A., Yang XU. Nonlinear direct data-driven control for UAV formation flight system[J]. Journal of Systems Engineering and Electronics, 2023, 34(6): 1409-1418.
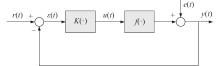
Fig 1
Nonlinear closed-loop system"
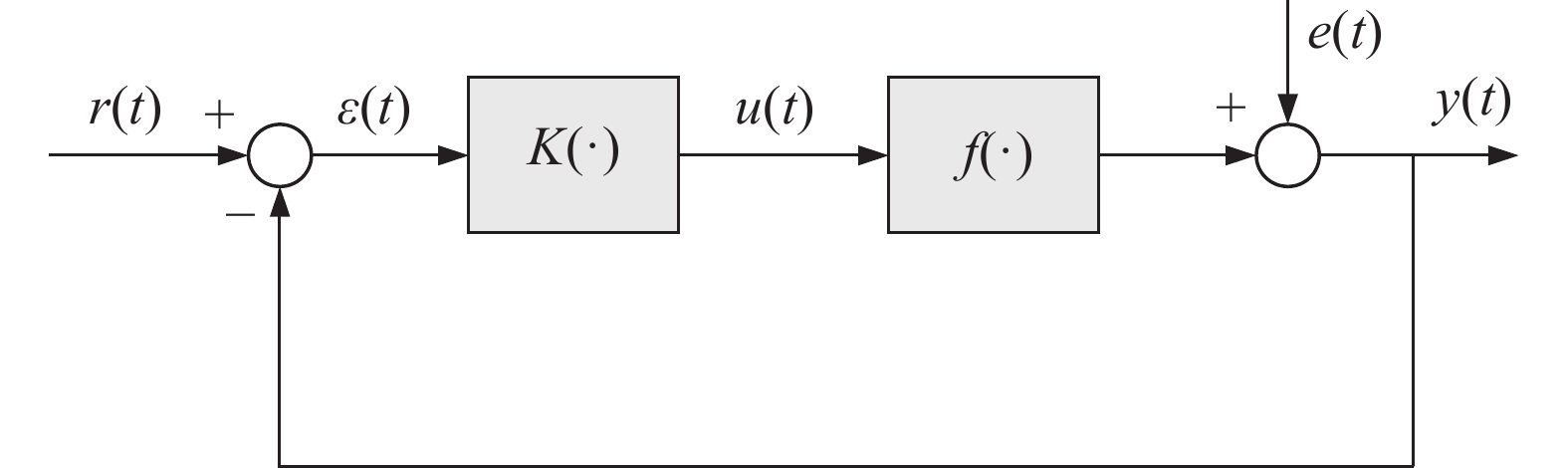
Fig 2
Approximated controller analysis"
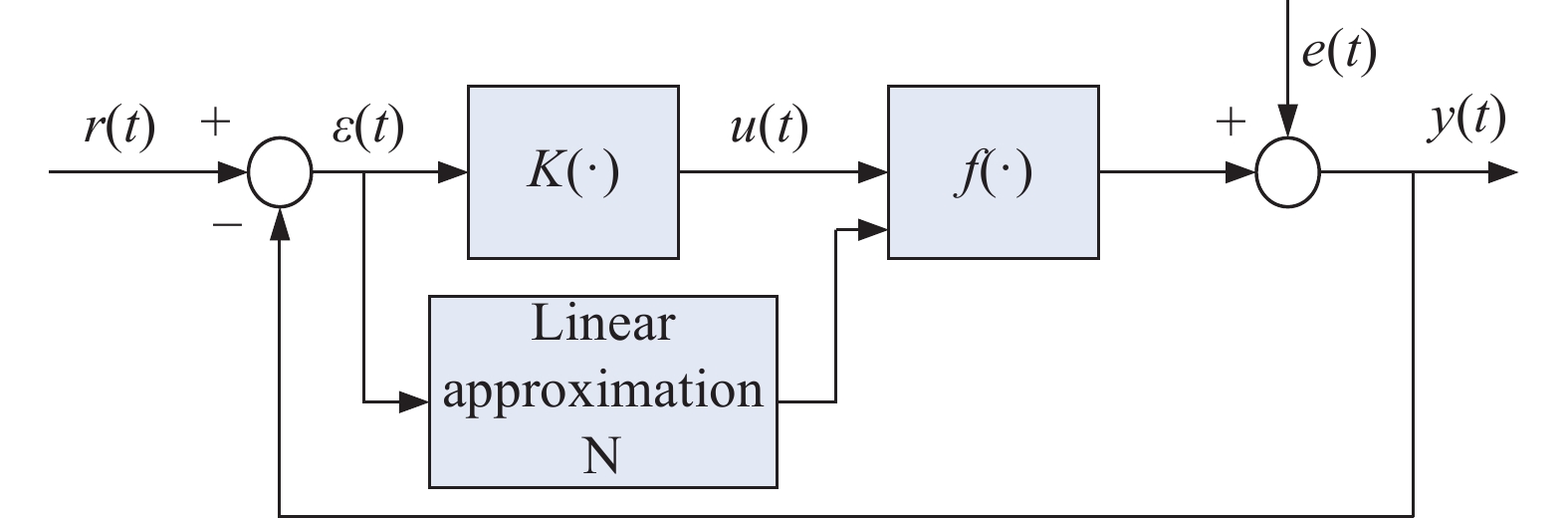

Fig 3
Centralized linear approximation"
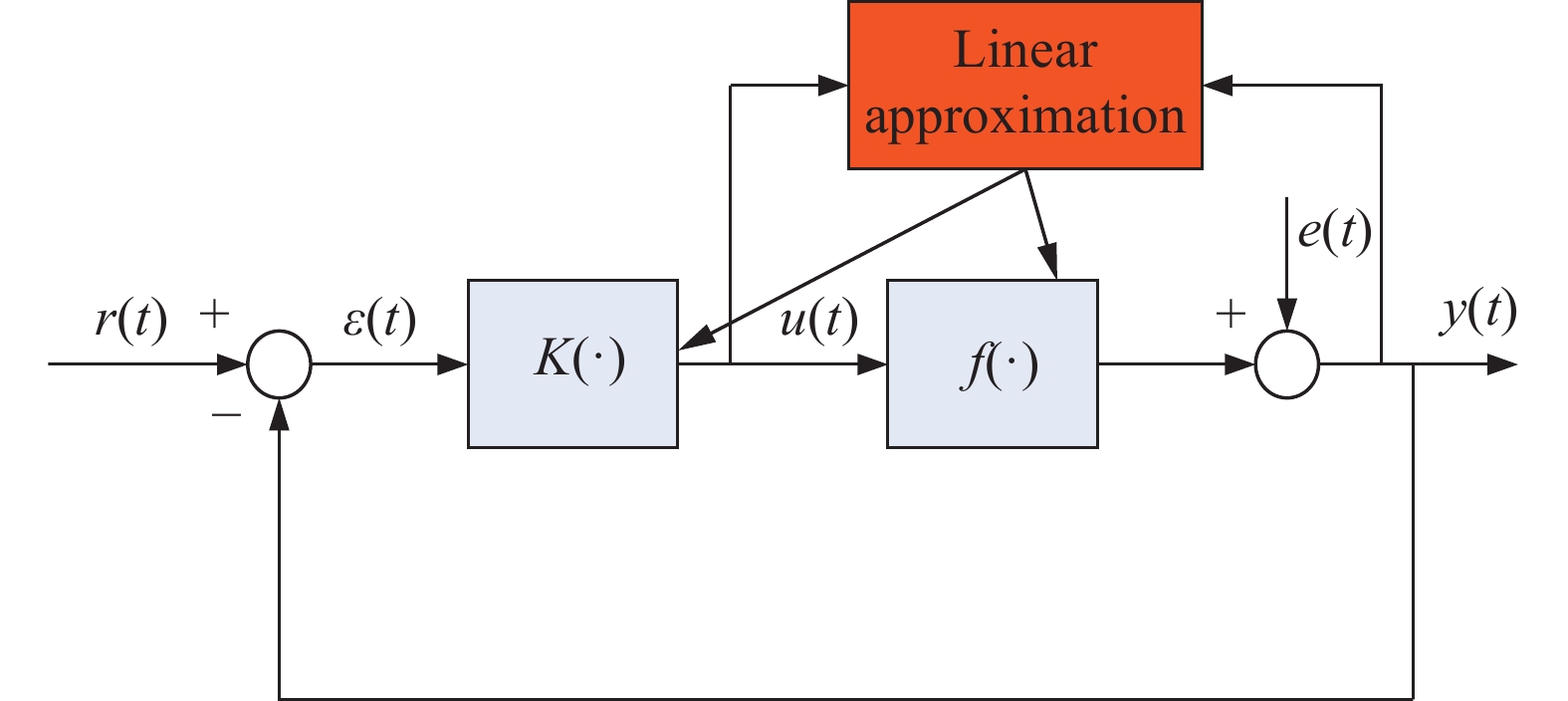
Fig 4
Distributed linear approximation"
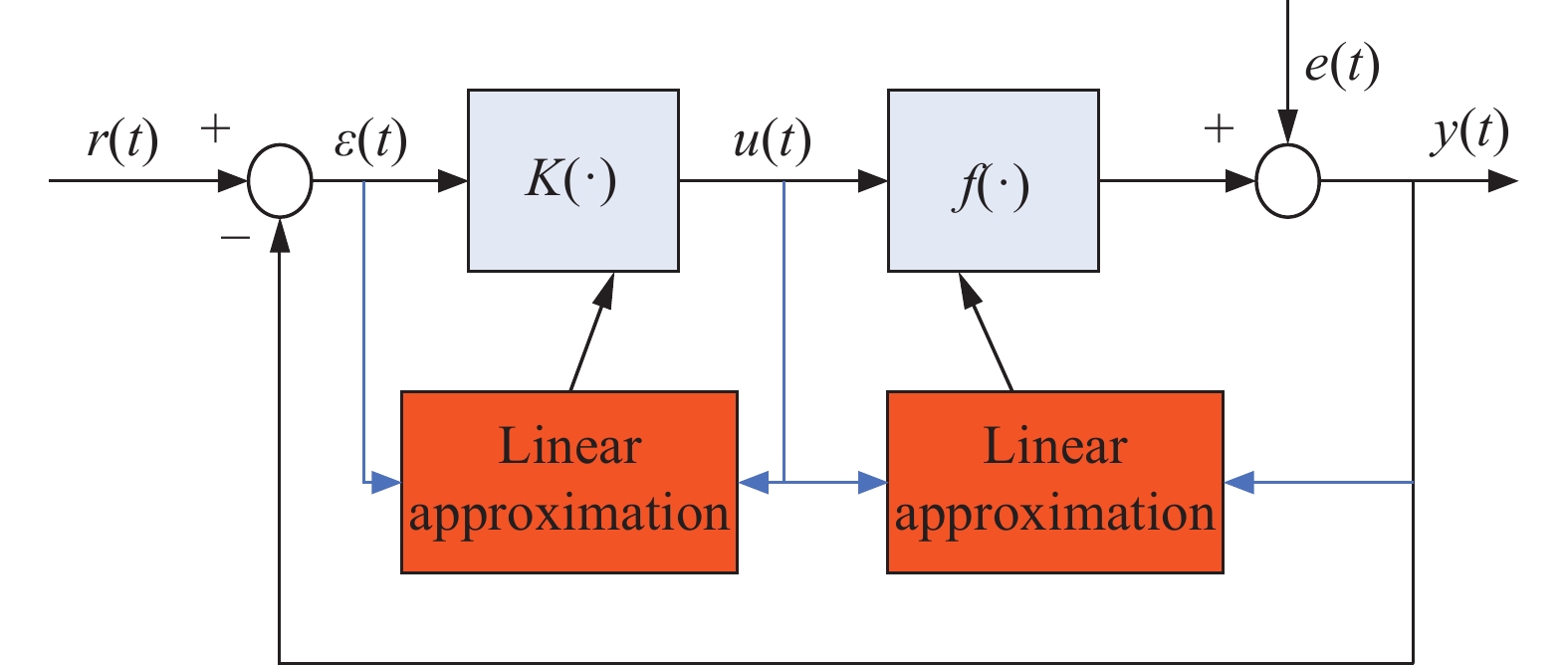

Fig 5
UAV formation flight structure"

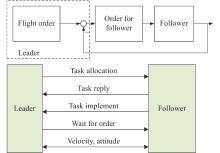
Fig 6
Leader-follower mode"
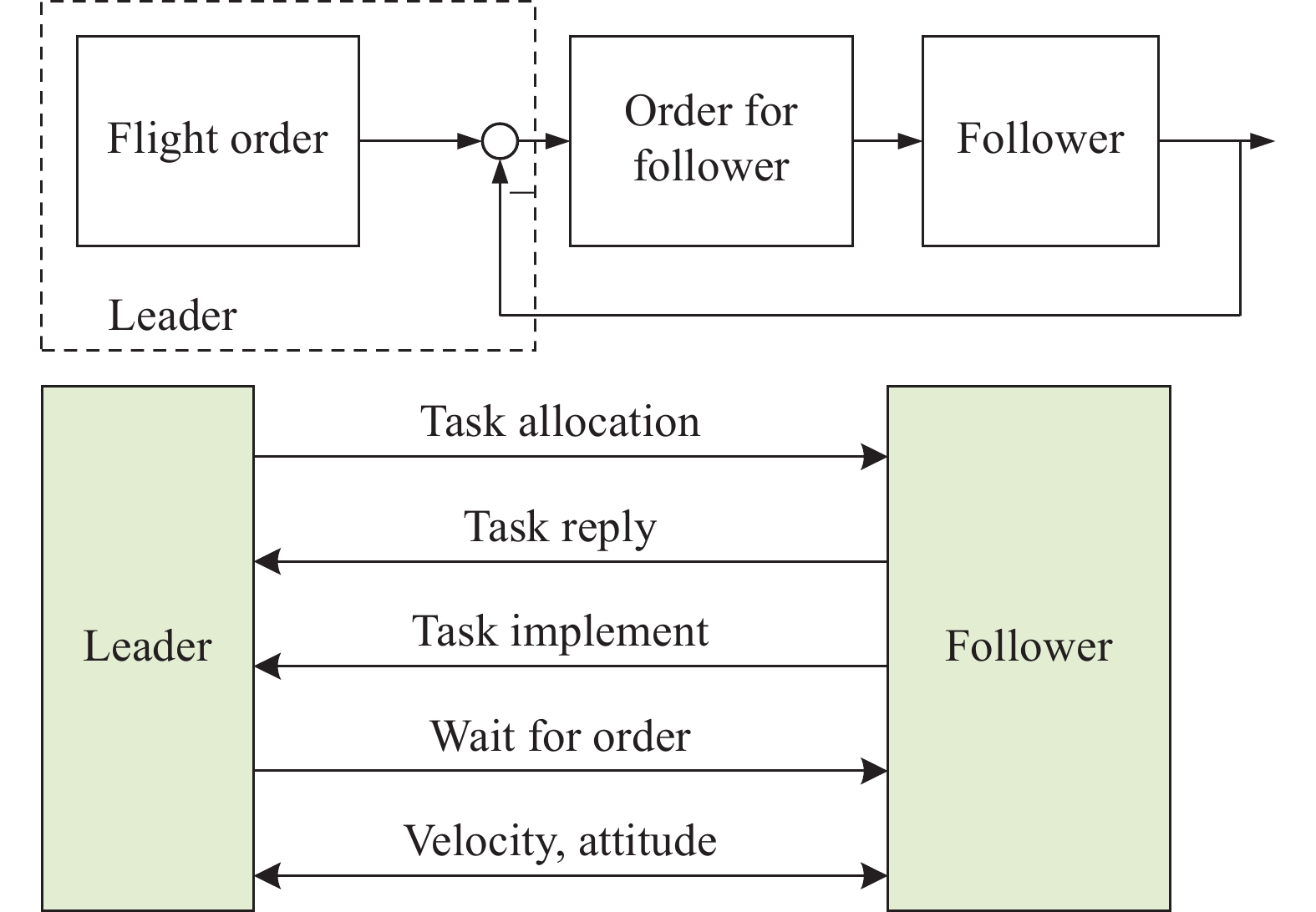
Fig 7
Formation flight control structure"
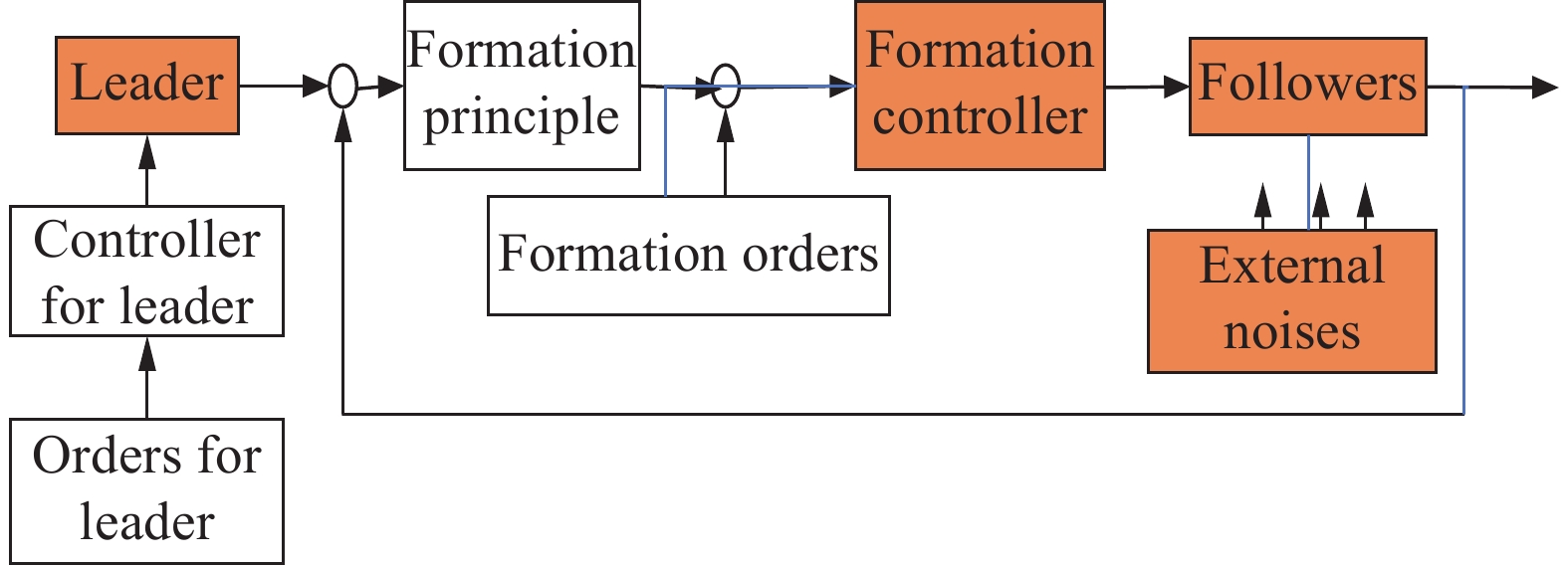
Fig 8
Extracted formation flight control system"
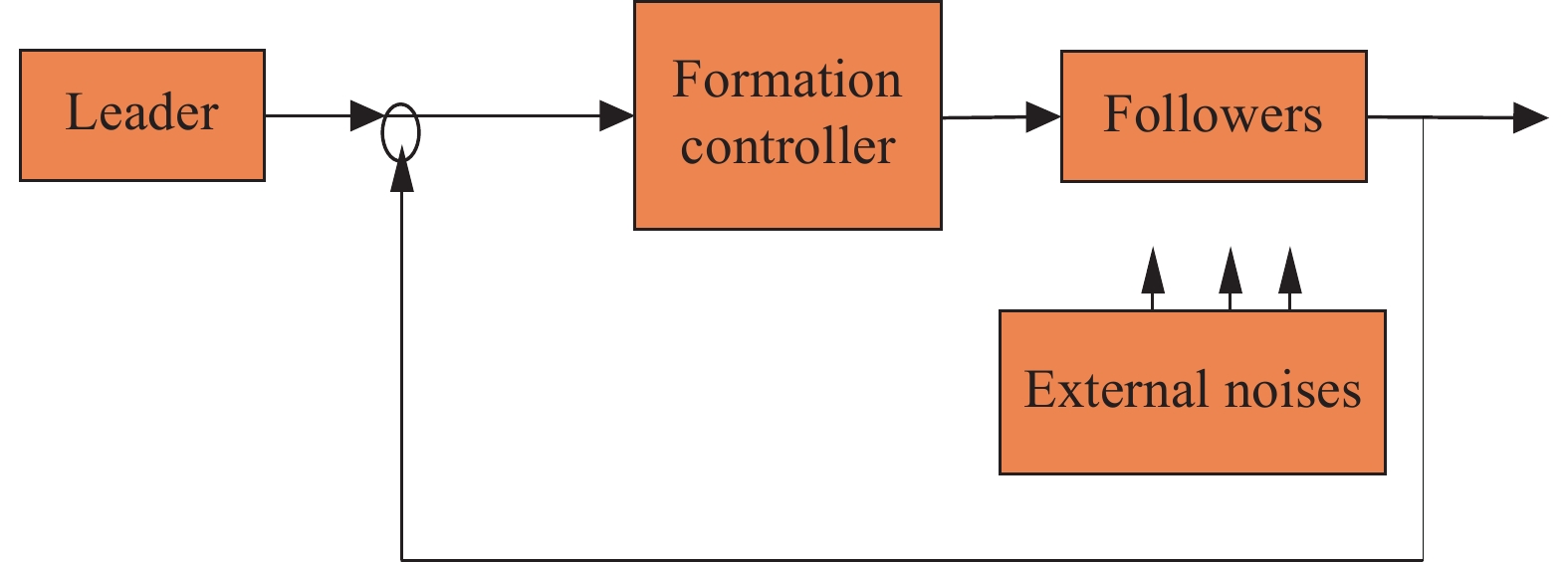
Fig 9
Applied input signal"
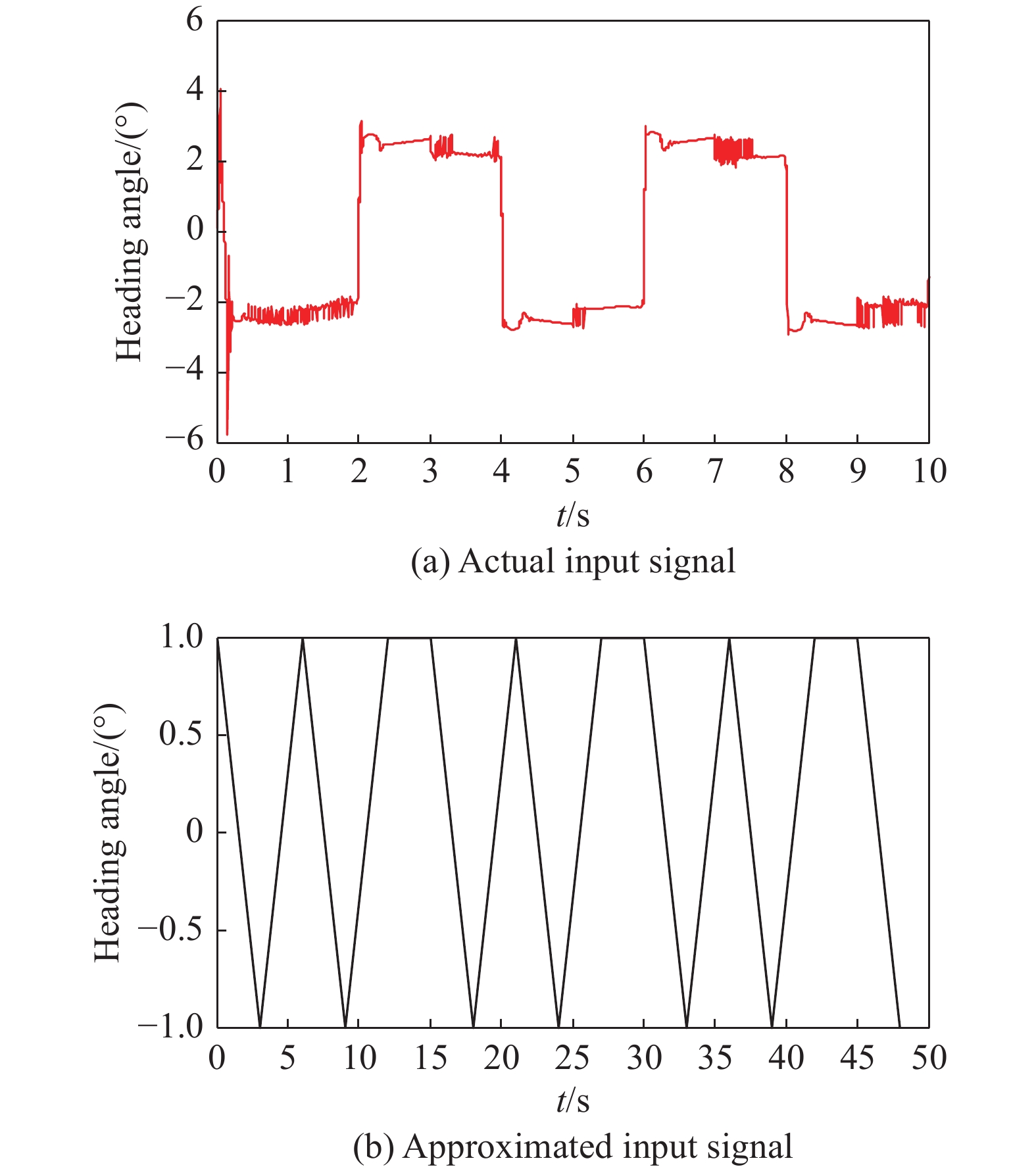
Fig 10
Observed output signal"
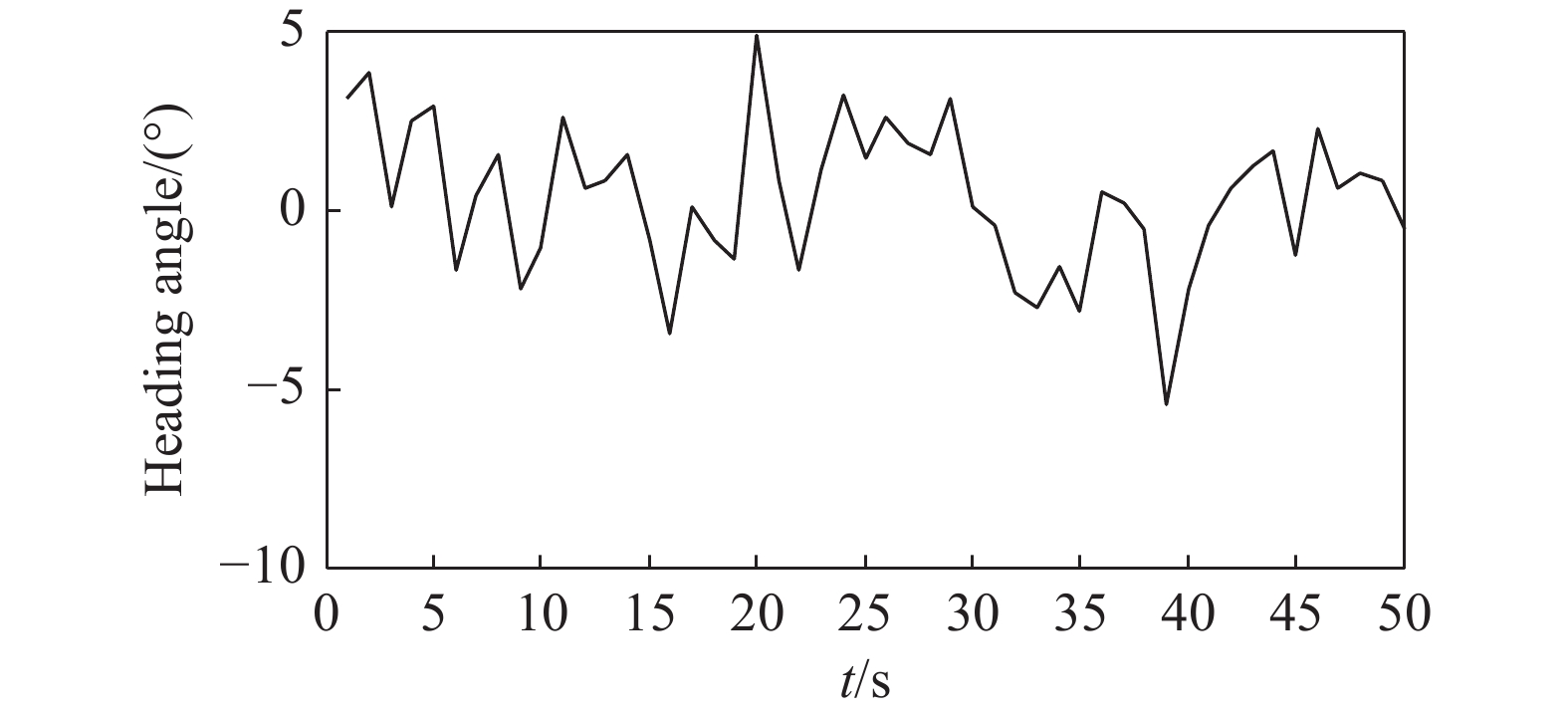
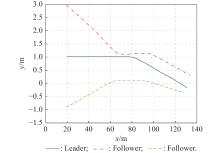
Fig 11
Whole flight trajectories for the UAV group"
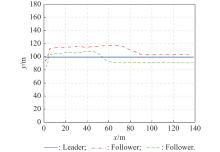
Fig 12
Horizontal velocity varying curve"
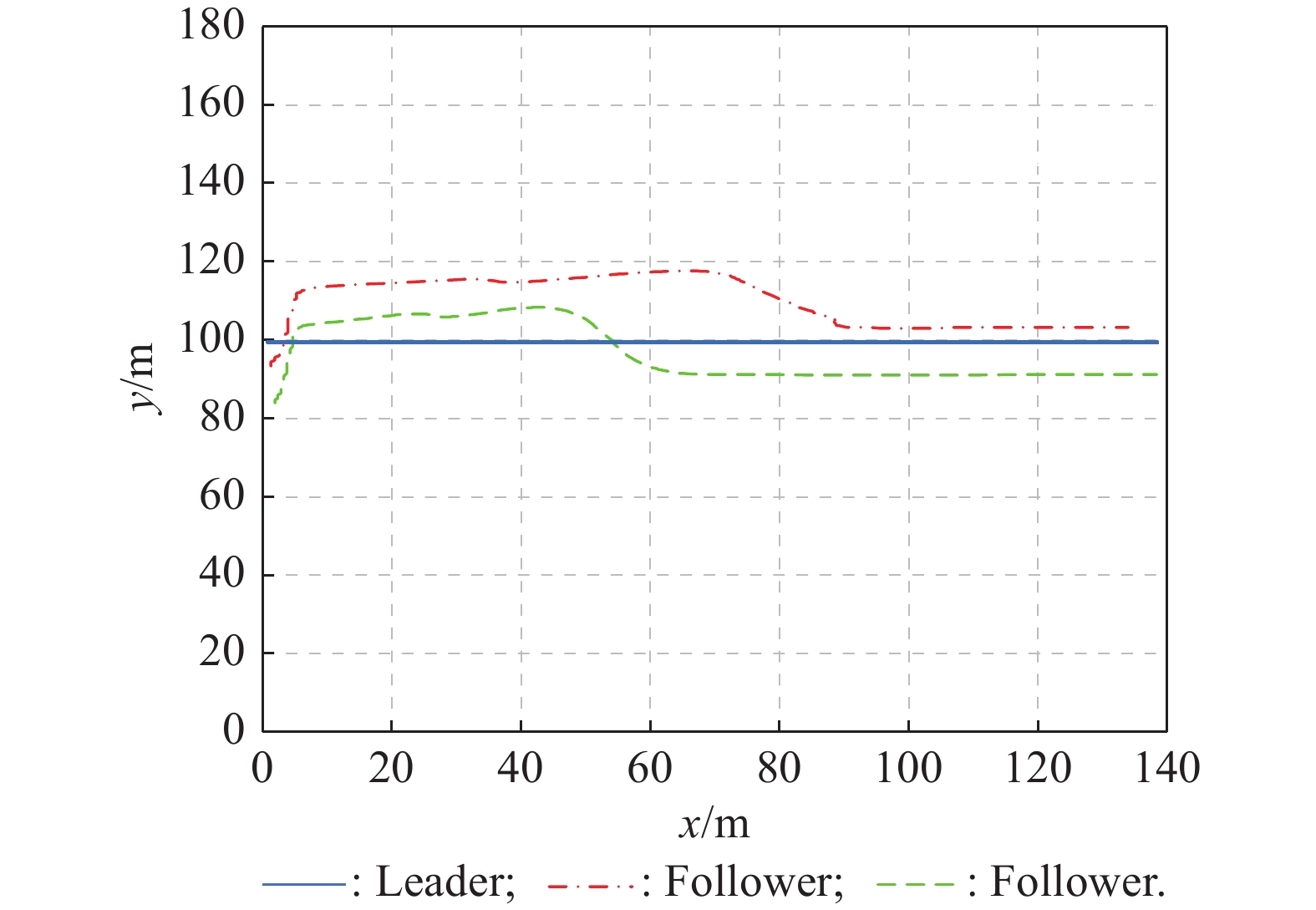
Fig 13
Heading angle varying curve"
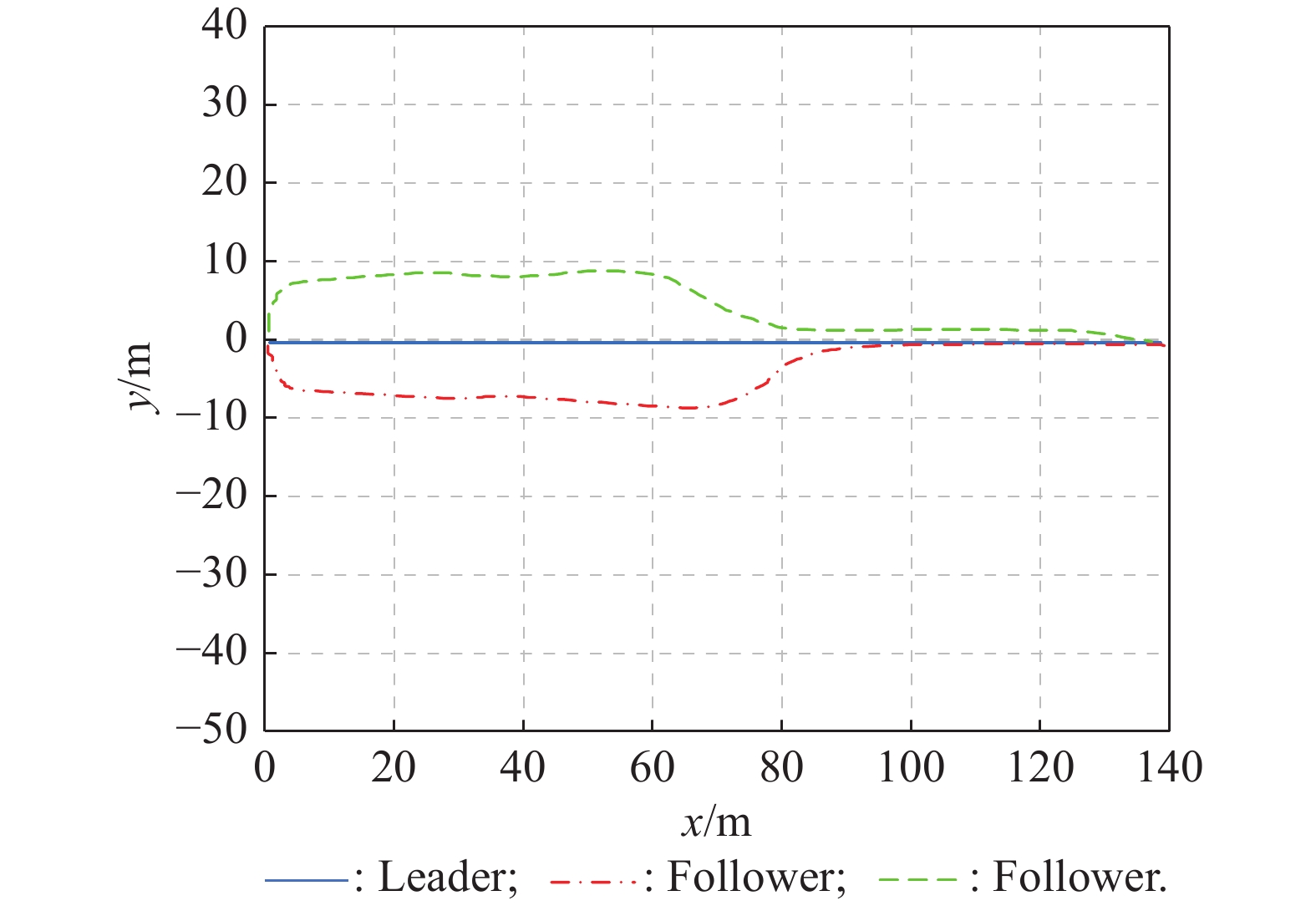

Fig 14
Two flight trajectories for leader and follower"
| 1 | PETER C. Robotics and control: fundamental algorithms in MATLAB. Switzerland: Springer Nature, 2022. |
| 2 | LOUIS G B, GILBERT A. Modelling and simulation: exploring dynamic system behavior. 3rd edition. Switzerland: Springer Nature, 2019. |
| 3 | ALBERTO I. Nonlinear control systems. 3rd edition. London: Springer Verlag, 1995. |
| 4 |
HOU Z S, WANG Z From model-based control to data-driven control: survey, classification and perspective. Information Sciences, 2013, 235, 3- 35.
doi: 10.1016/j.ins.2012.07.014 |
| 5 | PRECUP R E, ROMAN R C, SAFAEI A. Data-driven model-free controllers. Boca Raton: CRC Press, 2022. |
| 6 |
YU C P, LI Y, FANG H, et al System identification approach for inverse optimal control of finite-horizon linear quadratic regulators. Automatica, 2021, 129, 109636.
doi: 10.1016/j.automatica.2021.109636 |
| 7 | GAO R Z, XIA Y Q, DAI LI, et al Design and implementation of data-driven predictive cloud control system. Journal of Systems Engineering and Electronics, 2022, 33 (6): 1258- 1268. |
| 8 |
MILANESE M, NOVARA C Set membership prediction of nonlinear time series. IEEE Trans. on Automatic Control, 2005, 50 (11): 1655- 1669.
doi: 10.1109/TAC.2005.858693 |
| 9 | MILANESE M, NOVARA C. Set membership identification of nonlinear systems. Automatica, 2004, 40(2): 957–975. |
| 10 |
TANASKOVIC M, FAGIANO L, SMITH R, et al Adaptive receding horizon control for constrained MIMO systems. Automatica, 2014, 50 (12): 3019- 3029.
doi: 10.1016/j.automatica.2014.10.036 |
| 11 |
OHLSSON H, LJUNG L Identification of switched linear regression models using sum of norms regularization. Automatica, 2013, 49 (4): 1045- 1050.
doi: 10.1016/j.automatica.2013.01.031 |
| 12 |
LAUER F, BLOCH G A continuous optimization framework for hybrid system identification. Automatica, 2011, 47 (3): 608- 613.
doi: 10.1016/j.automatica.2011.01.020 |
| 13 | LAUER F On the complexity of switching linear regression. Automatica, 2016, 74 (12): 80- 83. |
| 14 | WANG J H, RAMIREZ-MENDOZA R A Stability analysis for nonlinear closed loop system structure. Systems Science & Control Engineering, 2020, 8 (1): 339- 349. |
| 15 |
WANG J H, RAMIREZ-MENDOZA R A Data driven strategy for linear parameter varying control design. IEEE Access, 2022, 10, 70068- 70077.
doi: 10.1109/ACCESS.2022.3187968 |
| 16 |
WANG J H, RAMIREZ-MENDOZA R A Direct data driven model reference control for flight simulation table. IEEE Access, 2022, 10, 34415- 34427.
doi: 10.1109/ACCESS.2022.3162204 |
| 17 | WANG J H, RAMIREZ-MENDOZA R A Synthesis analysis for data driven model reference control. Systems Science & Control Engineering, 2022, 10 (1): 79- 89. |
| 18 | WANG J H, RAMIREZ-MENDOZA R A Adaptive direct data driven design for two degrees of freedom controllers. International Journal of Innovative, Computing, Information and Control, 2022, 18 (3): 783- 800. |
| 19 | ZEILINGER M N, MORARI M Soft constrained model predictive control with robust stability guarantees. IEEE Trans. on Automatic Control, 2022, 59 (5): 1190- 1202. |
| 20 | SIEBER J, ZANELLI A System level disturbance reachable sets and their application to tube based MPC. European Journal of Control, 2022, 68 (3): 413- 423. |
| 21 |
LI D Y, GE S S, LEE T H Fixed-time synchronized consensus control of multi-agent systems. IEEE Trans. on Control of Network Systems, 2021, 8 (1): 89- 98.
doi: 10.1109/TCNS.2020.3034523 |
| 22 | XU Y, ZHENG W M, LUO D L, et al Dynamic affine formation control of networked under-actuated quad-rotor UAVs with three-dimensional patterns. Journal of Systems Engineering and Electronics, 2022, 33 (6): 1269- 1285. |
| 23 | WANG X Y, SUN S J, XIAO F, et al Dynamic event-triggered formation control of second-order nonholonomic systems. Journal of Systems Engineering and Electronics, 2023, 34 (2): 501- 514. |
| 24 |
LI D Y, CAO K, KONG L H, et al Fully distributed cooperative circumnavigation of networked unmanned aerial vehicles. IEEE/ASME Trans. on Mechatronics, 2021, 26 (2): 709- 718.
doi: 10.1109/TMECH.2021.3055654 |
| 25 |
GONG X, BASIN M V, FENG Z G, et al Resilient time-varying formation-tracking of multi-UAV systems against composite attacks: a two-layered framework. IEEE/CAA Journal of Automatica Sinica, 2023, 10 (4): 969- 984.
doi: 10.1109/JAS.2023.123339 |
| [1] | Haichao ZHU, Weiyao LAN. Robust output regulation problem with prescribed performance for nonlinear strict feedback systems [J]. Journal of Systems Engineering and Electronics, 2023, 34(4): 1033-1041. |
| [2] | Abdollah AZIZI, Mehdi FOROUZANFAR. Stabilizing controller design for nonlinear fractional order systems with time varying delays [J]. Journal of Systems Engineering and Electronics, 2021, 32(3): 681-689. |
| [3] | Hongwei WANG, Penglong FENG. Fuzzy modeling of multirate sampled nonlinear systems based on multi-model method [J]. Journal of Systems Engineering and Electronics, 2020, 31(4): 761-769. |
| [4] | Lixiong LIN, Qing WANG, Bingwei HE, Xiafu PENG. Evaluation of fault diagnosability for nonlinear uncertain systems with multiple faults occurring simultaneously [J]. Journal of Systems Engineering and Electronics, 2020, 31(3): 634-646. |
| [5] | Ligang GONG, Qing WANG, Chaoyang DONG. Switching disturbance rejection attitude control of near space vehicles with variable structure [J]. Journal of Systems Engineering and Electronics, 2019, 30(1): 167-179. |
| [6] | Jianguo GUO, Yuchao LIU, Jun ZHOU. Integral terminal sliding mode control for nonlinear systems [J]. Journal of Systems Engineering and Electronics, 2018, 29(3): 571-579. |
| [7] | Guifang LI, CHEN Ye-Hwa. Controller design for stochastic nonlinear systems with matched conditions [J]. Journal of Systems Engineering and Electronics, 2018, 29(1): 160-165. |
| [8] | Bomin Huang, Lingmei Chen, and Weiyao Lan. Global robust output regulation for a class of affine singular nonlinear systems [J]. Systems Engineering and Electronics, 2017, 28(4): 745-. |
| [9] | Ri Liu, Xiuxia Sun, Wenhan Dong, and Dong Wang. Finite-time adaptive sliding mode control for heavyweight airdrop operations [J]. Systems Engineering and Electronics, 2017, 28(2): 338-346. |
| [10] | Zhanshan Zhao, Hongru Gu, Jing Zhang, and Gang Ding. Terminal sliding mode control based on super-twisting algorithm [J]. Systems Engineering and Electronics, 2017, 28(1): 145-. |
| [11] | Junjie Huang, Zhen Jiang2, and Junwei Zhao. Component fault diagnosis for nonlinear systems [J]. Journal of Systems Engineering and Electronics, 2016, 27(6): 1283-1290. |
| [12] | Yueneng Yang and Ye Yan. Decoupled nonsingular terminal sliding mode control for affine nonlinear systems [J]. Systems Engineering and Electronics, 2016, 27(1): 192-. |
| [13] | Yuanliang Zhang and Kil To Chong. Model algorithm control using neural networks for input delayed nonlinear control system [J]. Journal of Systems Engineering and Electronics, 2015, 26(1): 142-. |
| [14] | Yinqiu Wang, Qinghe Wu, Yao Wang, and Di Yu. Consensus algorithm for multiple quadrotor systems under fixed and switching topologies [J]. Journal of Systems Engineering and Electronics, 2013, 24(5): 818-827. |
| [15] | Xuhui Bu, Fashan Yu, Zhongsheng Hou, and Haizhu Yang. Robust iterative learning control for nonlinear systems with measurement disturbances [J]. Journal of Systems Engineering and Electronics, 2012, 23(6): 906-913. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||