
Journal of Systems Engineering and Electronics ›› 2023, Vol. 34 ›› Issue (6): 1419-1431.doi: 10.23919/JSEE.2023.000141
• AUTONOMOUS DECISION AND COOPERATIVE CONTROL OF UAV SWARMS • Previous Articles Next Articles
Donghao QIN( ), Le WANG(), Jiuan GAO(), Jianxiang XI()
), Le WANG(), Jiuan GAO(), Jianxiang XI()
Received:2022-09-10
Online:2023-12-18
Published:2023-12-29
Contact:
Jianxiang XI
E-mail:42606553@qq.com;wangaz14@163.com;gaojiuan6@126.com;xijx07@mails.tsinghua.edu.cn
About author:Supported by:Donghao QIN, Le WANG, Jiuan GAO, Jianxiang XI. Minimum-energy leader-following formation of distributed multi-agent systems with communication constraints[J]. Journal of Systems Engineering and Electronics, 2023, 34(6): 1419-1431.

Fig 1
Switching set"
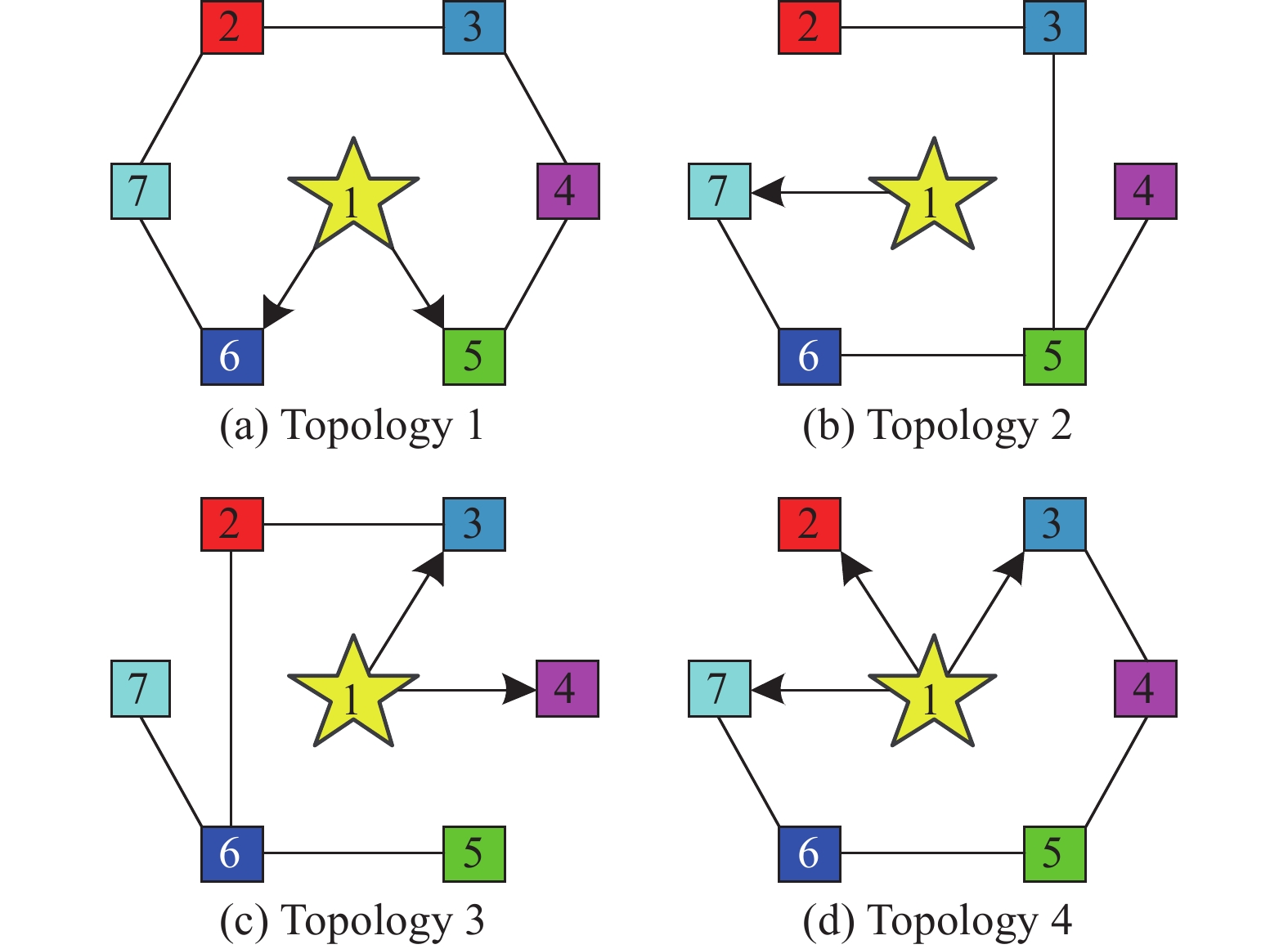
Fig 2
Switching signal"
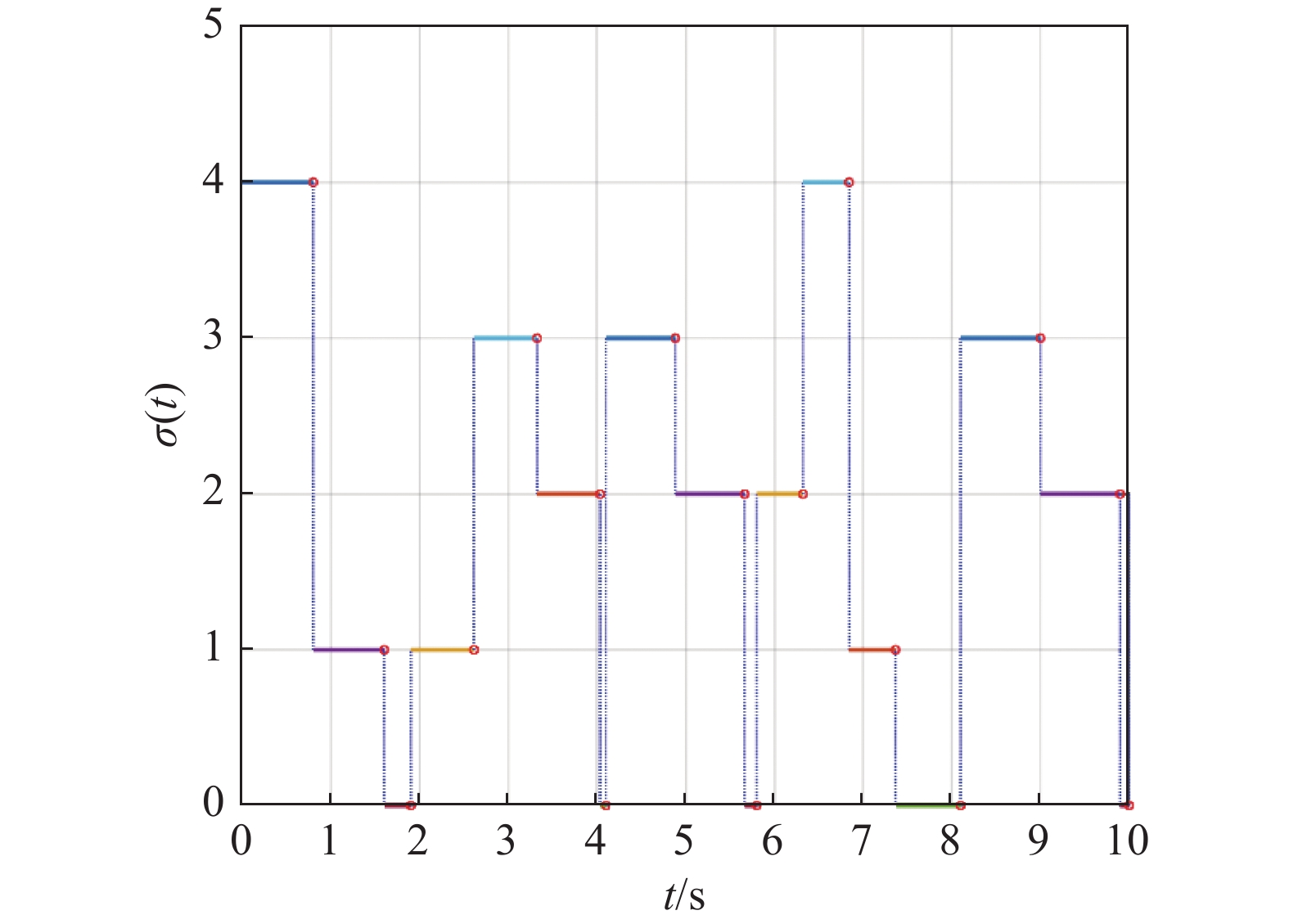
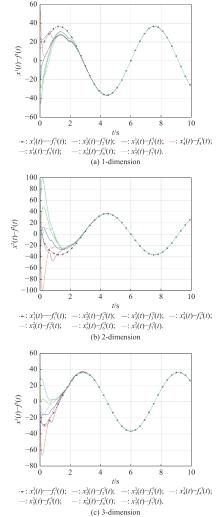
Fig 3
Trajectories of ${{\boldsymbol{x}}_{\boldsymbol{i}}}({\boldsymbol{t}}) - {{\boldsymbol{f}}_{\boldsymbol{i}}}({\boldsymbol{t}})$"
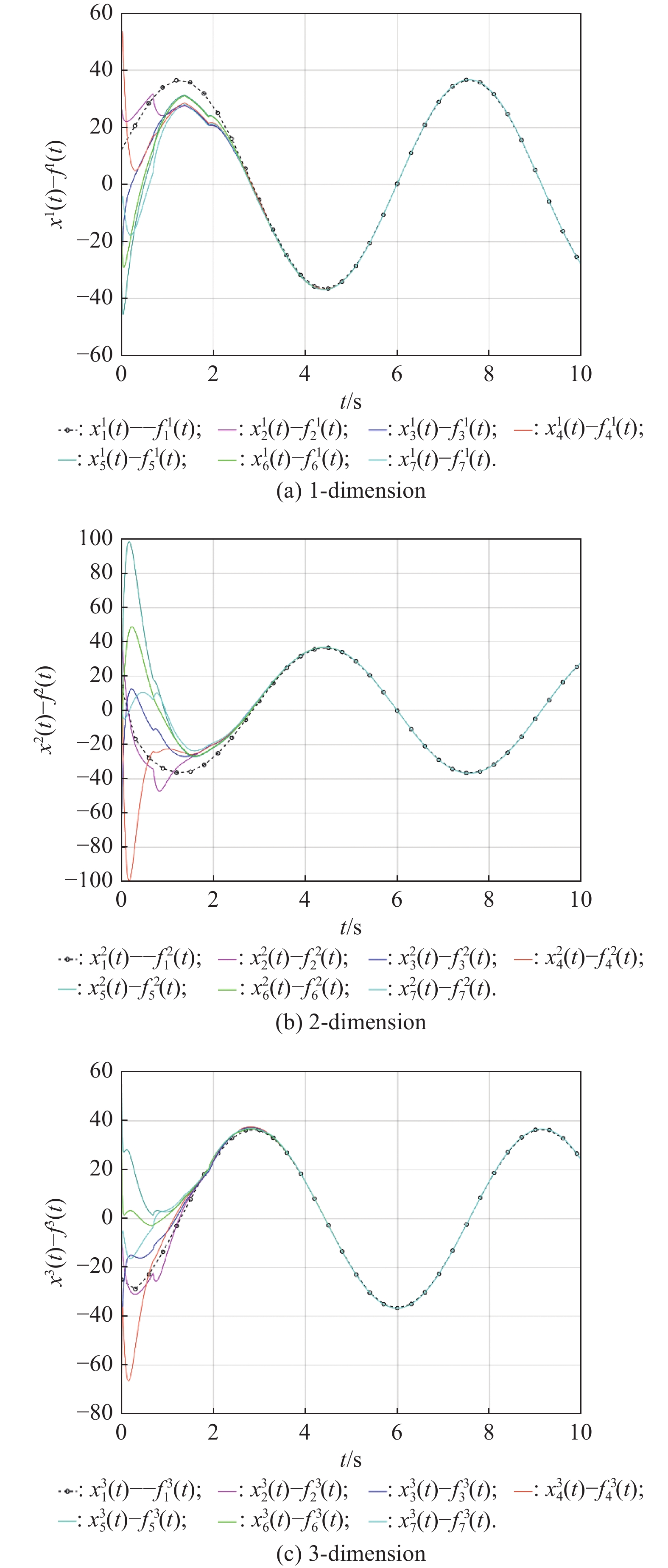
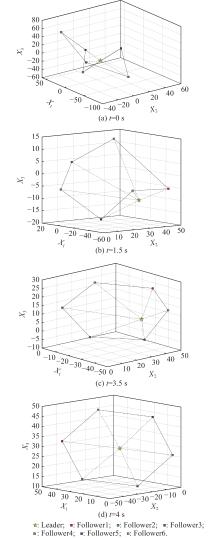
Fig 4
Position changes of the leader and six followers"
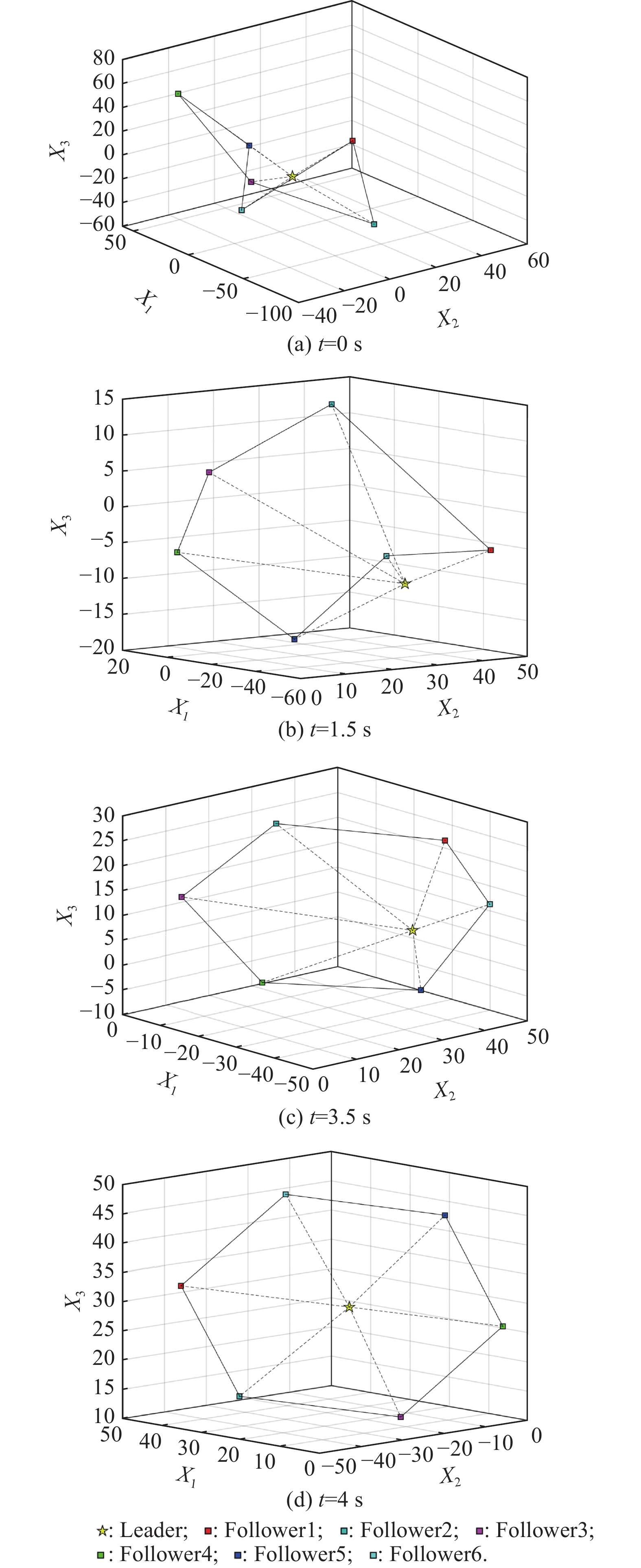
Fig 5
Trajectory of the leader"
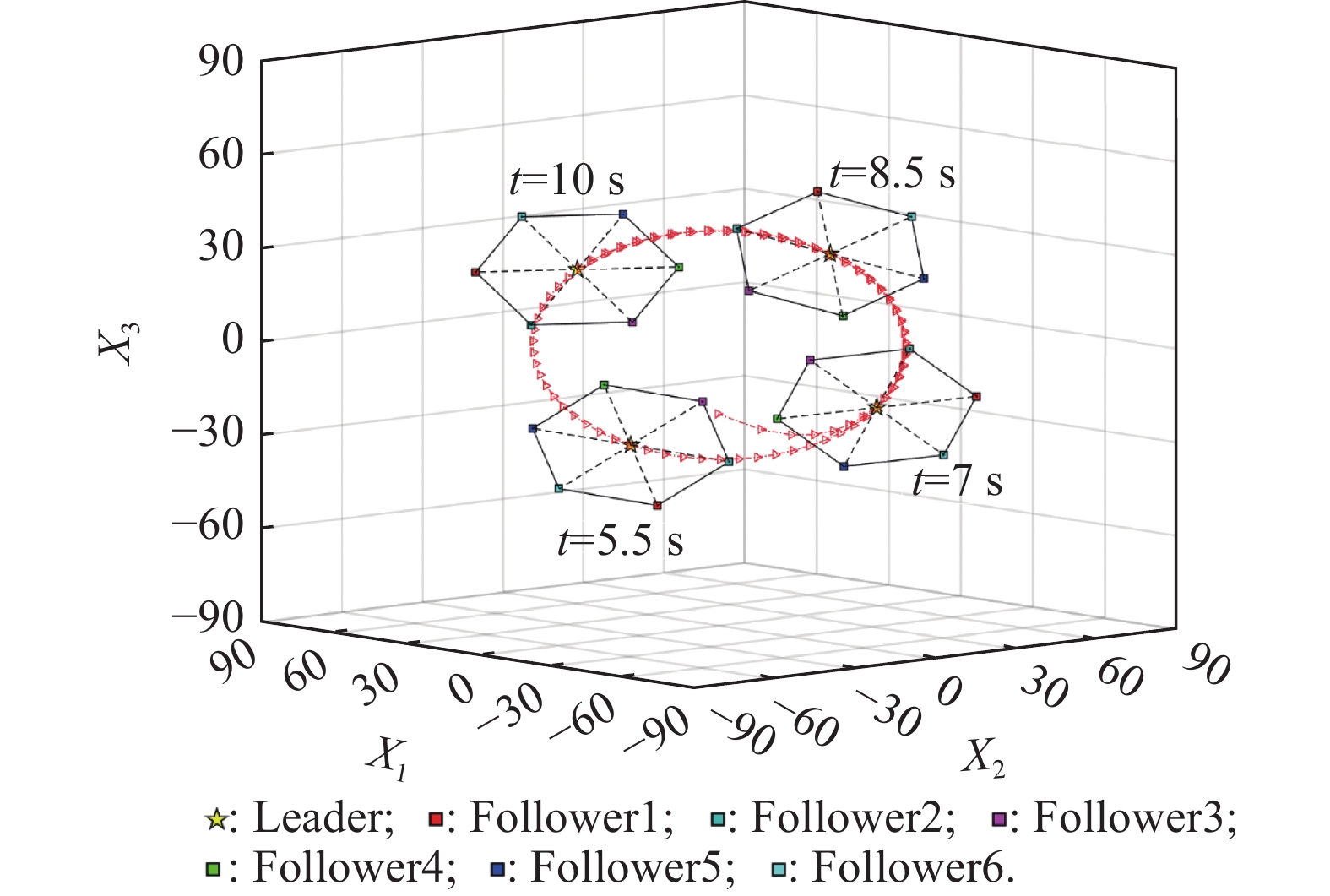
Fig 6
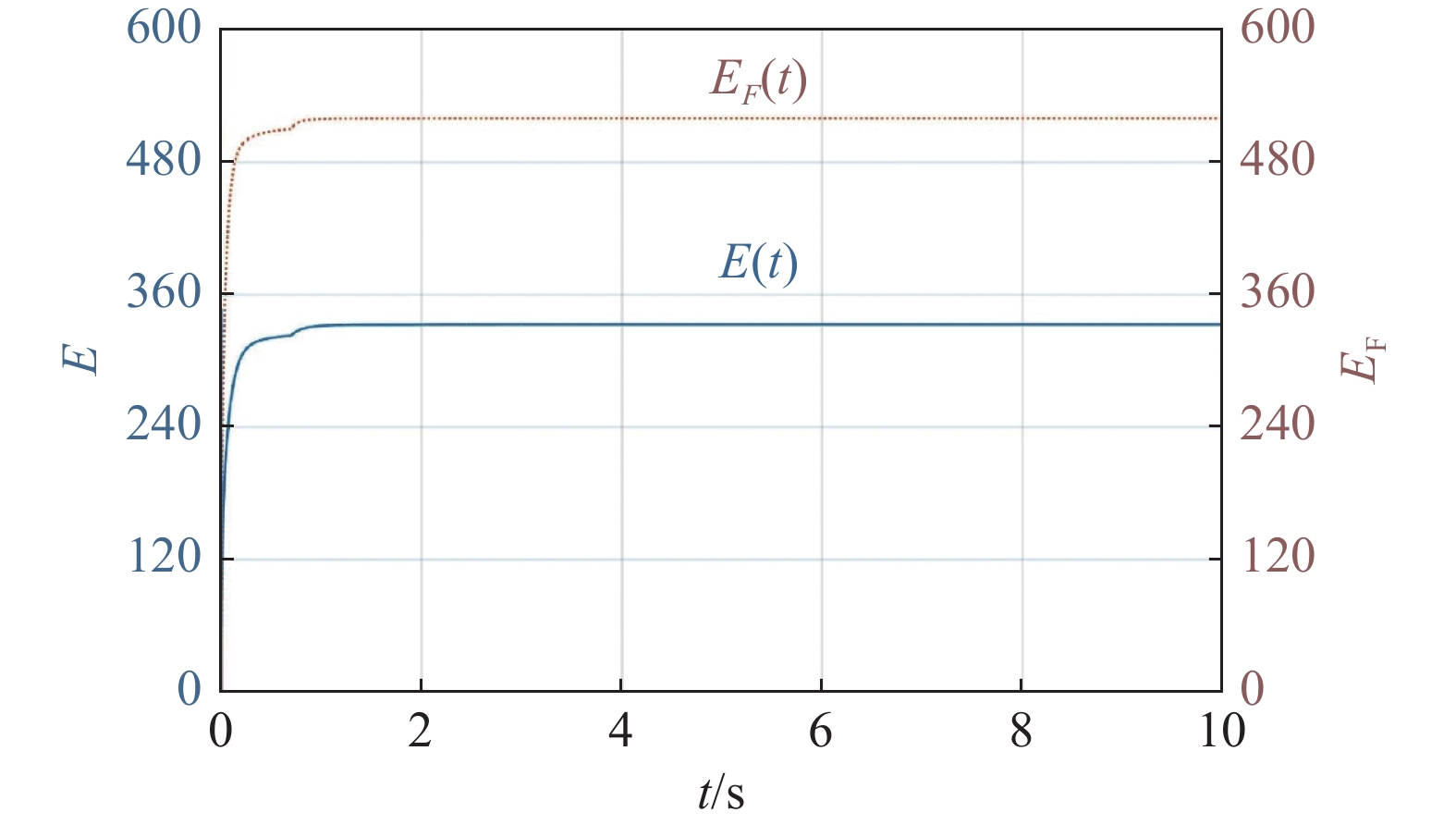
Energy consumption curves ${\boldsymbol{E}}{\boldsymbol{(t)}}$ and ${{\boldsymbol{E}}_{\boldsymbol{F}}}{\boldsymbol{(t)}}$"
| 1 | PARTOVIBAKHSH M, LIU G J An adaptive unscented Kalman filtering approach for online estimation of model parameters and state-of-charge of lithium-ion batteries for autonomous mobile robots. IEEE Trans. on Automatic Control, 2014, 23 (1): 357- 363. |
| 2 |
KIM C J, CHWA D Obstacle avoidance method for wheeled mobile robots using interval type-2 fuzzy neural network. IEEE Trans. on Fuzzy System, 2015, 23 (3): 677- 687.
doi: 10.1109/TFUZZ.2014.2321771 |
| 3 |
ZHANG D, CAI W J, XIE L H, et al Nonfragile distributed filtering for T-S fuzzy systems in sensor networks. IEEE Trans. on Fuzzy System, 2015, 23 (5): 1883- 1890.
doi: 10.1109/TFUZZ.2014.2367101 |
| 4 |
CHEN S, HO D W C, HUANG C Fault reconstruction and state estimator design for distributed sensor networks in multi target tracking. IEEE Trans. on Industrial Electronics, 2015, 62 (11): 7091- 7102.
doi: 10.1109/TIE.2015.2448685 |
| 5 |
DONG X W, YU B C, SHI Z Y, et al Time-varying formation control for unmanned aerial vehicles: theories and applications. IEEE Trans. on Control Systems Technology, 2015, 23 (1): 340- 348.
doi: 10.1109/TCST.2014.2314460 |
| 6 | QI Y H, ZHOU S L, KANG Y H, et al Formation control for unmanned aerial vehicles with directed and switching topologies. International Journal of Aerospace Engineering, 2016, 2016, 7657452. |
| 7 |
DANG Z H, ZHANG Y L Control design and analysis of an inner-formation flying system. IEEE Trans. on Aerospace and Electronic Systems, 2015, 51 (3): 1621- 1634.
doi: 10.1109/TAES.2014.130263 |
| 8 |
HUANG X L, ZHANG C, LU H Q, et al Adaptive reaching law based sliding mode control for electromagnetic formation flight with input saturation. Journal of the Franklin Institute, 2016, 353 (11): 2398- 2417.
doi: 10.1016/j.jfranklin.2016.04.004 |
| 9 |
WANG L, XI J X, HOU B, et al Limited-budget consensus design and analysis for multiagent systems with switching topologies and intermittent communications. IEEE/CAA Journal of Automatica Sinica, 2021, 8 (10): 1724- 1736.
doi: 10.1109/JAS.2021.1004000 |
| 10 |
ABBSL Y, MOOSAVIAN S A A, NOVINZADEH A B Formation control of aerial robots using virtual structure and new fuzzy based self-tuning synchronization. Transactions of the Institute Measurement and Control, 2017, 39 (12): 1906- 1919.
doi: 10.1177/0142331216649021 |
| 11 |
BALCH T, ARKIN R C Behavior-based formation control for multirobot teams. IEEE Trans. on Robot Automatic, 1998, 14 (6): 926- 939.
doi: 10.1109/70.736776 |
| 12 | LIN J L, HWANG K S, WANG Y L, et al A simple scheme for formation control based on weighted behavior learning. IEEE Trans. on Neural Networks and Learning Systems, 2013, 25 (6): 1033- 1044. |
| 13 | LORIA A, DASDEMIR J, JARQUIN N A Leader-follower formation and tracking control of mobile robots along straight paths. IEEE Trans. on Control Systems Technology, 2015, 24 (2): 727- 732. |
| 14 |
YANG X J, LIAO L J, YANG Q, et al Limited-energy output formation for multiagent systems with intermittent interactions. Journal of the Franklin Institute, 2021, 358 (13): 6462- 6489.
doi: 10.1016/j.jfranklin.2021.06.009 |
| 15 |
LI J L, XI J X, HE M, et al Formation control for networked multiagent systems with a minimum energy constraint. Chinese Journal of Aeronautics, 2023, 36 (1): 342- 355.
doi: 10.1016/j.cja.2022.01.015 |
| 16 |
REN W Consensus strategies for cooperative control of vehicle formations. IET Control Theory Application, 2007, 1 (2): 505- 512.
doi: 10.1049/iet-cta:20050401 |
| 17 |
ANDERSSON M, WALLANDER J Kin selection and reciprocity in flight formation. Behavioral Ecology, 2004, 15 (1): 158- 162.
doi: 10.1093/beheco/arg109 |
| 18 |
REN W, SORENSEN N Distributed coordination architecture for multirobot formation control. Robotics and Autonomous Systems, 2008, 56 (4): 324- 333.
doi: 10.1016/j.robot.2007.08.005 |
| 19 |
BRINON-ARRANZ L, SEURET A, CANUDAS-DE-WIT C Cooperative control design for time-varying formations of multi-agent systems. IEEE Trans. on Automatic Control, 2014, 59 (8): 2283- 2288.
doi: 10.1109/TAC.2014.2303213 |
| 20 |
YOO S J, KIM T H Distributed formation tracking of networked mobile robots under unknown slippage effects. Automatica, 2015, 54, 100- 106.
doi: 10.1016/j.automatica.2015.01.043 |
| 21 | YAN C H, ZHANG W, LI X H, et al Observer-based time-varying formation tracking for one-sided Lipschitz nonlinear systems via adaptive protocol. International Journal of Control Automation and Systems, 2020, 18 (12): 2753- 2764. |
| 22 |
LIU X F, XIE Y F, LI F B, et al Formation control of singular multiagent systems with switching topologies. International Journal of Robust Nonlinear Control, 2020, 30 (2): 652- 664.
doi: 10.1002/rnc.4789 |
| 23 |
XI J X, WANG L, ZHENG J F, et al Energy-constraint formation for multiagent systems with switching interaction topologies. IEEE Trans. on Circuits and Systems-I: Regular papers, 2020, 67 (7): 2442- 2454.
doi: 10.1109/TCSI.2020.2975383 |
| 24 | YANG X, HUA C C, YAN J, et al Adaptive formation control of cooperative teleoperators with intermittent communications. IEEE Trans. on Cybernetics, 2018, 49 (7): 2514- 2523. |
| 25 | CHAI X F, LIU J, YU Y, et al Practical fixed-time event-triggered time-varying formation tracking control for disturbed multi-agent systems with continuous communication free. Unmanned Systems, 2021, 9 (1): 1- 12. |
| 26 |
CAO Y C, REN W Optimal linear-consensus algorithms: an LQR perspective. IEEE Trans. on Systems, Man, and Cybernetics-Part B:Cybernetics, 2010, 40 (3): 819- 829.
doi: 10.1109/TSMCB.2009.2030495 |
| 27 |
ZHAO Y D, ZHANG W D Guaranteed cost consensus protocol design for linear multi-agent systems with sampled-data information: an input delay approach. ISA Transactions, 2017, 67, 87- 97.
doi: 10.1016/j.isatra.2016.12.003 |
| 28 |
WANG Z, HE M, ZHENG T, et al Guaranteed cost consensus for high-dimensional multi-agent systems with time-varying delays. IEEE/CAA Journal of Automatica Sinica, 2018, 5 (1): 181- 189.
doi: 10.1109/JAS.2017.7510430 |
| 29 |
YU J L, DONG X W, LI Q D, et al Robust guaranteed cost time-varying formation tracking for high-order multiagent systems with time-varying delays. IEEE Trans. on Systems Man Cybernetics: Systems, 2020, 50 (4): 1465- 1475.
doi: 10.1109/TSMC.2018.2883516 |
| 30 |
XI J X, WANG C, YANG X J, et al Limited-budget output consensus for descriptor multiagent systems with energy constraints. IEEE Trans. on Cybernetics, 2020, 50 (11): 4585- 4598.
doi: 10.1109/TCYB.2019.2963172 |
| 31 | GODSIL C, ROYLE G. Algebraic graph theory. New York: Springer-Verlag, 2001. |
| 32 | YU W W, CAO J D, WANG J An LMI approach to global asymptotic stability of the delayed Cohen-Grossberg neural network via nonsmooth analysis. Neural Networks, 2007, 20 (7): 810- 818. |
| 33 | ANDERSON B D O, MOORE J B. Optimal control: linear quadratic methods. New York: Dover publications, 2007. |
| 34 | LIN Z Y, DING W, YAN G F, et al. Leader-follower formation via complex Laplacian. Automatica, 2013, 49(6): 1900−1906. |
| 35 |
DONG X W, ZHOU Y, REN Z, et al Time-varying formation tracking for second-order multi-agent systems subjected to switching topologies with application to quadrotor formation flying. IEEE Trans. on Industrial Electronics, 2017, 64 (6): 5014- 5024.
doi: 10.1109/TIE.2016.2593656 |
| 36 | WANG J N, XIN M. Integrated optimal formation control of multiple unmanned aerial vehicles. IEEE Trans. on Control Systems Technology, 2013, 21(5): 1731−1744. |
| 37 | WANG J N, BI C Y, WANG D D, et al. Finite-time distributed event-triggered formation control for quadrotor UAVs with experimentation. ISA Transactions, 2022, 126: 585−596. |
| [1] | Zhengyu YE, Bin JIANG, Yuehua CHENG, Ziquan YU, Yang YANG. Distributed fault diagnosis observer for multi-agent system against actuator and sensor faults [J]. Journal of Systems Engineering and Electronics, 2023, 34(3): 766-774. |
| [2] | Pu YANG, Xukai HU, Zixin WANG, Zhiqing ZHANG. Sliding mode fault tolerant consensus control for multi-agent systems based on super-twisting observer [J]. Journal of Systems Engineering and Electronics, 2022, 33(6): 1309-1319. |
| [3] | Sader MALIKA, Fuyong WANG, Zhongxin LIU, Zengqiang CHEN. Distributed fuzzy fault-tolerant consensus of leader-follower multi-agent systems with mismatched uncertainties [J]. Journal of Systems Engineering and Electronics, 2021, 32(5): 1031-1040. |
| [4] | Duo QI, Junhua HU, Xiaolong LIANG, Jiaqiang ZHANG, Zhihao ZHANG. Research on consensus of multi-agent systems with and without input saturation constraints [J]. Journal of Systems Engineering and Electronics, 2021, 32(4): 947-955. |
| [5] |
Bingqiang LI, Tianyi LAN, Yiyun ZHAO, Shuaishuai LYU.
Open-loop and closed-loop |
| [6] | Xia WU, Yan LI, Yongjian SUN, Alei CHEN, Jianwen CHEN, Jianchao MA, Hao CHEN. Investigation of MAS structure and intelligent+ information processing mechanism of hypersonic target detection and recognition system [J]. Journal of Systems Engineering and Electronics, 2020, 31(6): 1105-1115. |
| [7] | Jie ZHANG, Gang WANG, Shaohua YUE, Yafei SONG, Jiayi LIU, Xiaoqiang YAO. Multi-agent system application in accordance with game theory in bi-directional coordination network model [J]. Journal of Systems Engineering and Electronics, 2020, 31(2): 279-289. |
| [8] | Weiwei WU, Qian MA, Yexin LIU, Yongjun KIM. A model for knowledge transfer in a multi-agent organization based on lattice kinetic model [J]. Journal of Systems Engineering and Electronics, 2020, 31(1): 156-167. |
| [9] | Dariush TAVAKOLIFAR, Hamid KHALOOZADEH, Roya AMJADIFARD. Stabilization of switched systems with all unstable modes: application to the aircraft team problem [J]. Journal of Systems Engineering and Electronics, 2019, 30(4): 792-798. |
| [10] | Xiaolei Li, Xiaoyuan Luo, Shaobao Li, Jianjin Li, and Xinping Guan. Consensus of second-order nonlinear multi-agent systems via sliding mode observer and controller [J]. Systems Engineering and Electronics, 2017, 28(4): 756-. |
| [11] | Yanchao Sun, Wenjia Wang, Guangfu Ma, Zhuo Li, and Chuanjiang Li. Backstepping-based distributed coordinated tracking for multiple uncertain Euler-Lagrange systems [J]. Journal of Systems Engineering and Electronics, 2016, 27(5): 1083-1095. |
| [12] | Jia Wei and Huajing Fang. Multi-agent consensus with time-varying delays and switching topologies [J]. Journal of Systems Engineering and Electronics, 2014, 25(3): 489-495. |
| [13] | Li Song, Qinghe Wu, Di Yu, and Yinqiu Wang. Distributed stereoscopic rotating formation control of networks of second-order agents [J]. Journal of Systems Engineering and Electronics, 2013, 24(3): 480-. |
| [14] | Xu Zhu, Jianguo Yan, and Yaohong Qu. Distributed consensus algorithm for networked Euler-Lagrange systems with self-delays and uncertainties [J]. Journal of Systems Engineering and Electronics, 2012, 23(6): 898-905. |
| [15] | Zhihai Wu and Huajing Fang. Improvement for consensus performance of multi-agent systems based on delayed-state-derivative feedback [J]. Journal of Systems Engineering and Electronics, 2012, 23(1): 137-144. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||