
Journal of Systems Engineering and Electronics ›› 2023, Vol. 34 ›› Issue (6): 1432-1446.doi: 10.23919/JSEE.2023.000162
• AUTONOMOUS DECISION AND COOPERATIVE CONTROL OF UAV SWARMS • Previous Articles Next Articles
Jialong ZHANG1,2,3( ), Kun HAN3(), Pu ZHANG4(), Zhongxi HOU3(), Lei YE3,*
), Kun HAN3(), Pu ZHANG4(), Zhongxi HOU3(), Lei YE3,*
Received:2022-10-10
Online:2023-12-18
Published:2023-12-29
Contact:
Lei YE
E-mail:zjl0117@mail.nwpu.edu.cn;hankun17@nudt.edu.cn;zhangpu@mail.nwpu.edu.cn;hzx@nudt.edu.cn
About author:Supported by:Jialong ZHANG, Kun HAN, Pu ZHANG, Zhongxi HOU, Lei YE. A survey on joint-operation application for unmanned swarm formations under a complex confrontation environment[J]. Journal of Systems Engineering and Electronics, 2023, 34(6): 1432-1446.
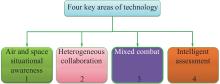
Fig 1
Technology classification of key unmanned swarm system areas"
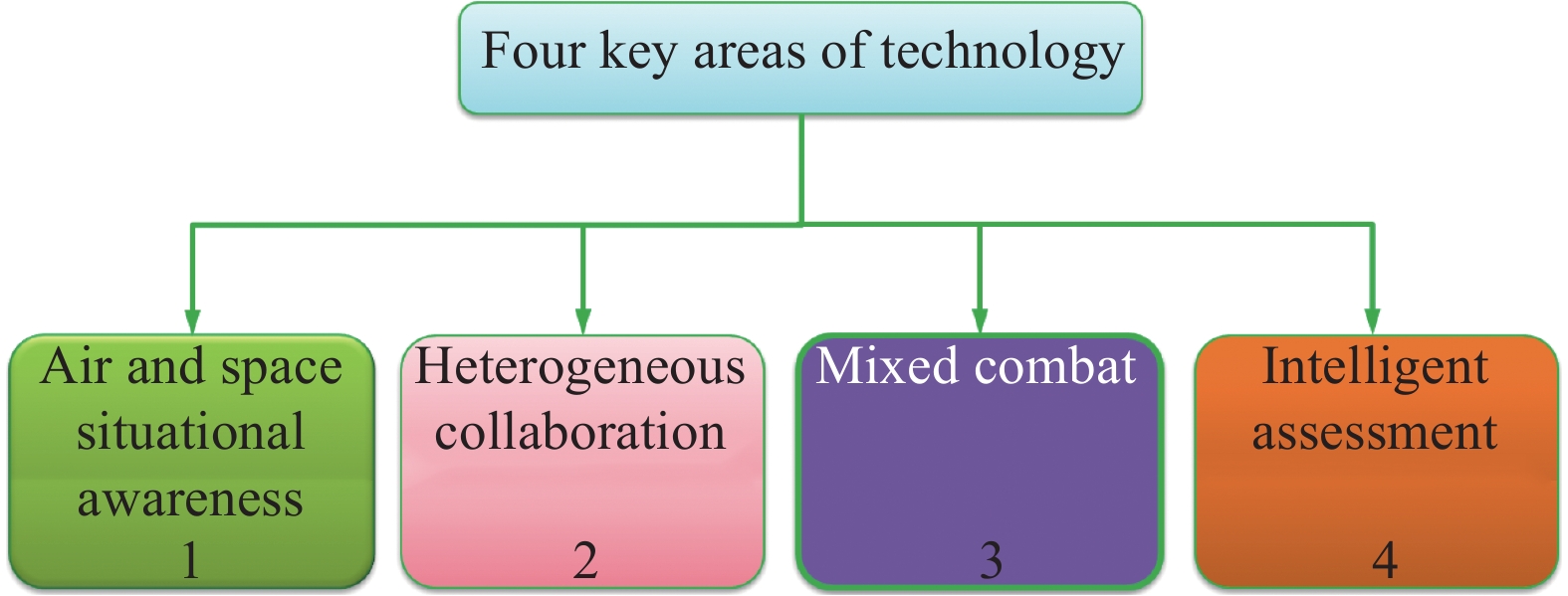

Fig 2
Schematic diagram of cluster combat task assignment"
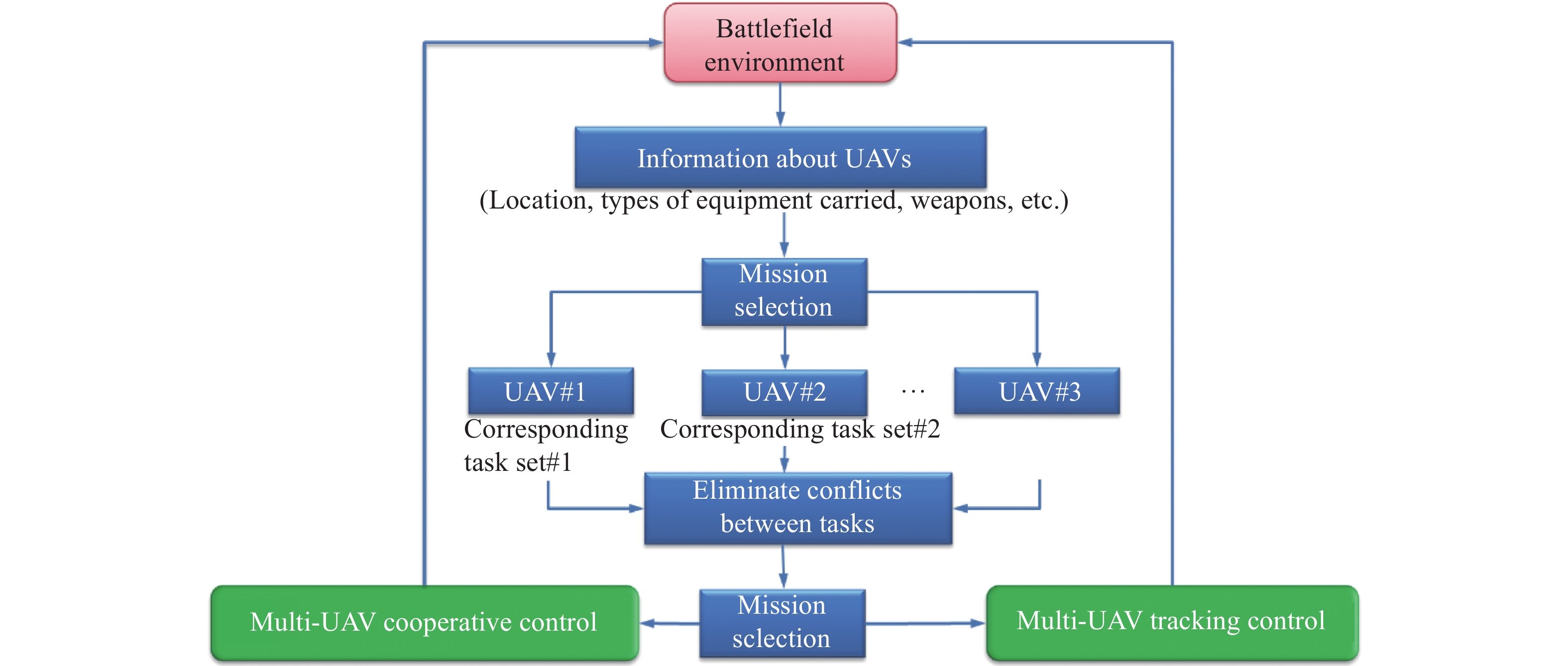

Fig 3
Cyberwarfare flowchart"
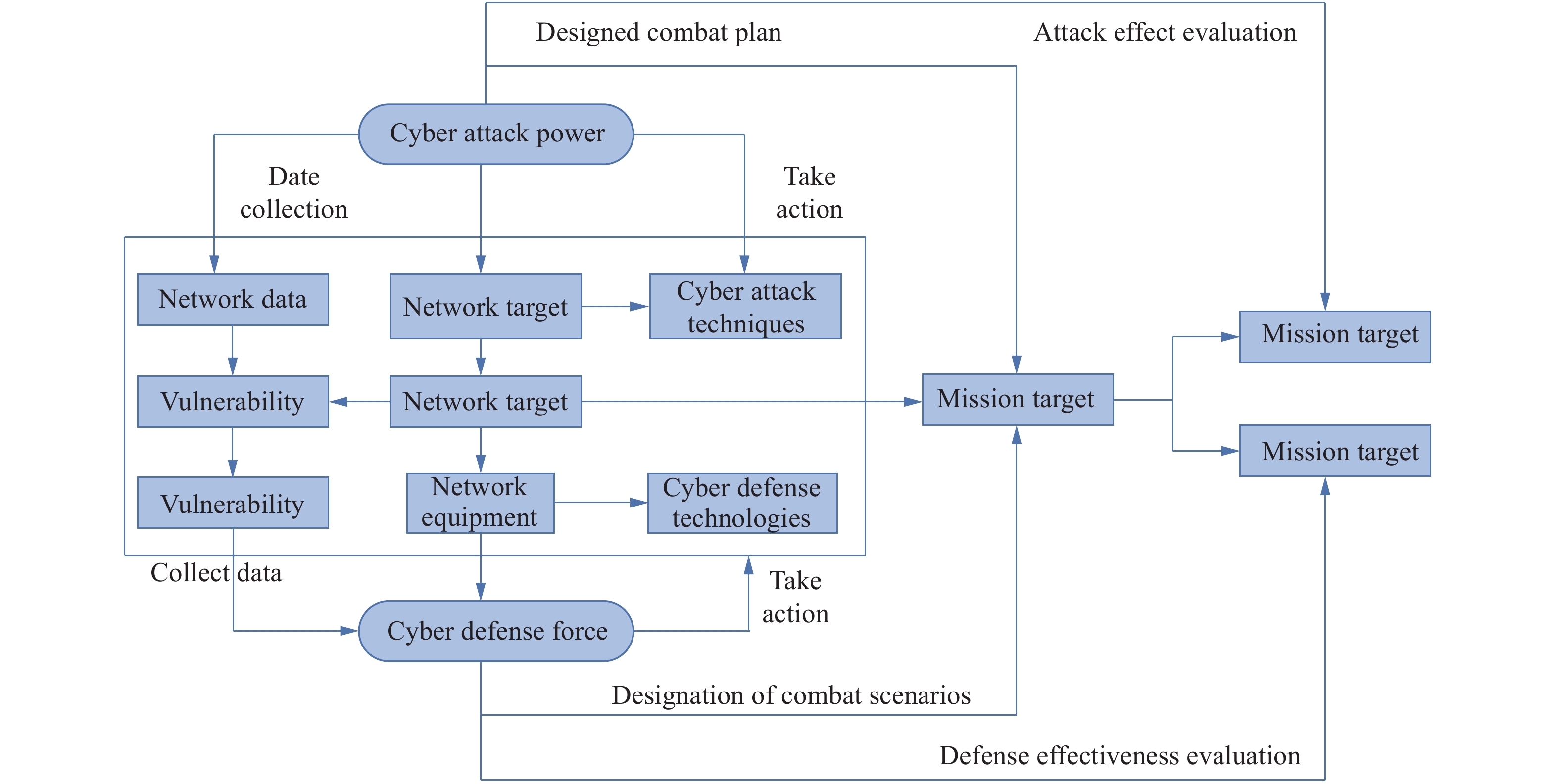

Fig 4
Unmanned swarm combat system ground station"

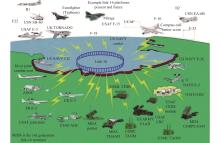
Fig 5
Diagram of the cooperative operation of heterogeneous agents"


Fig 6
Key UAV swarm cooperative operation technologies"
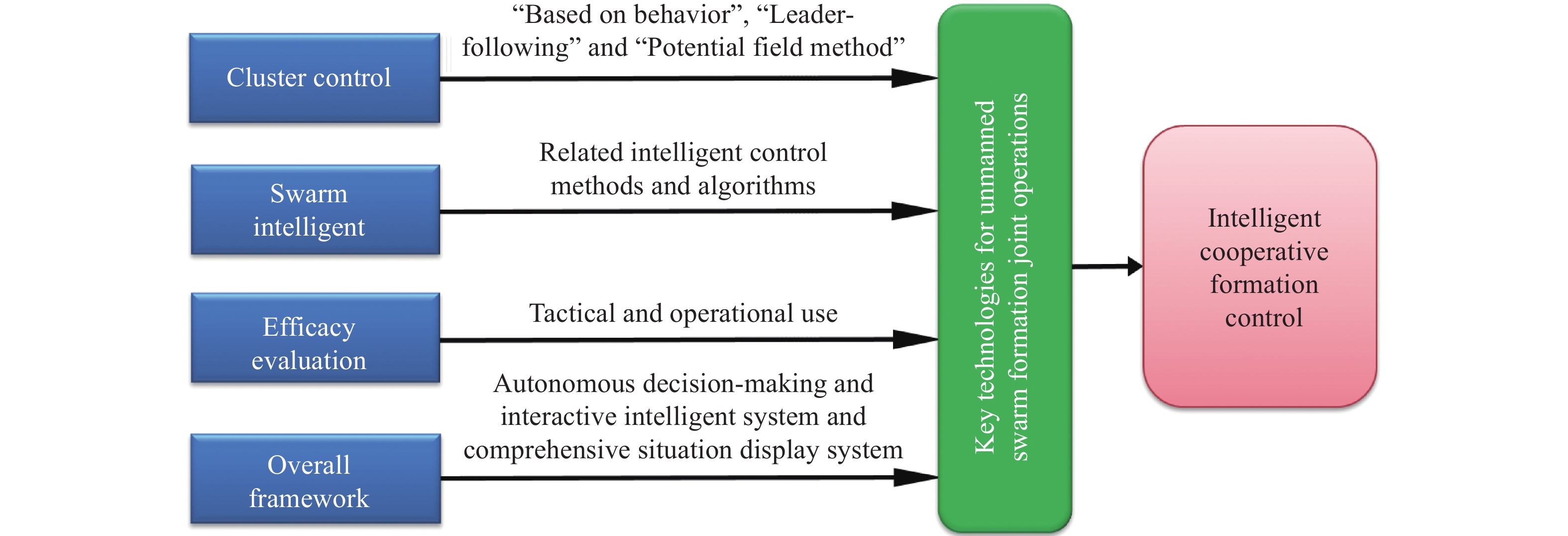

Fig 7
Digital simulation platform for unmanned swarm combat"
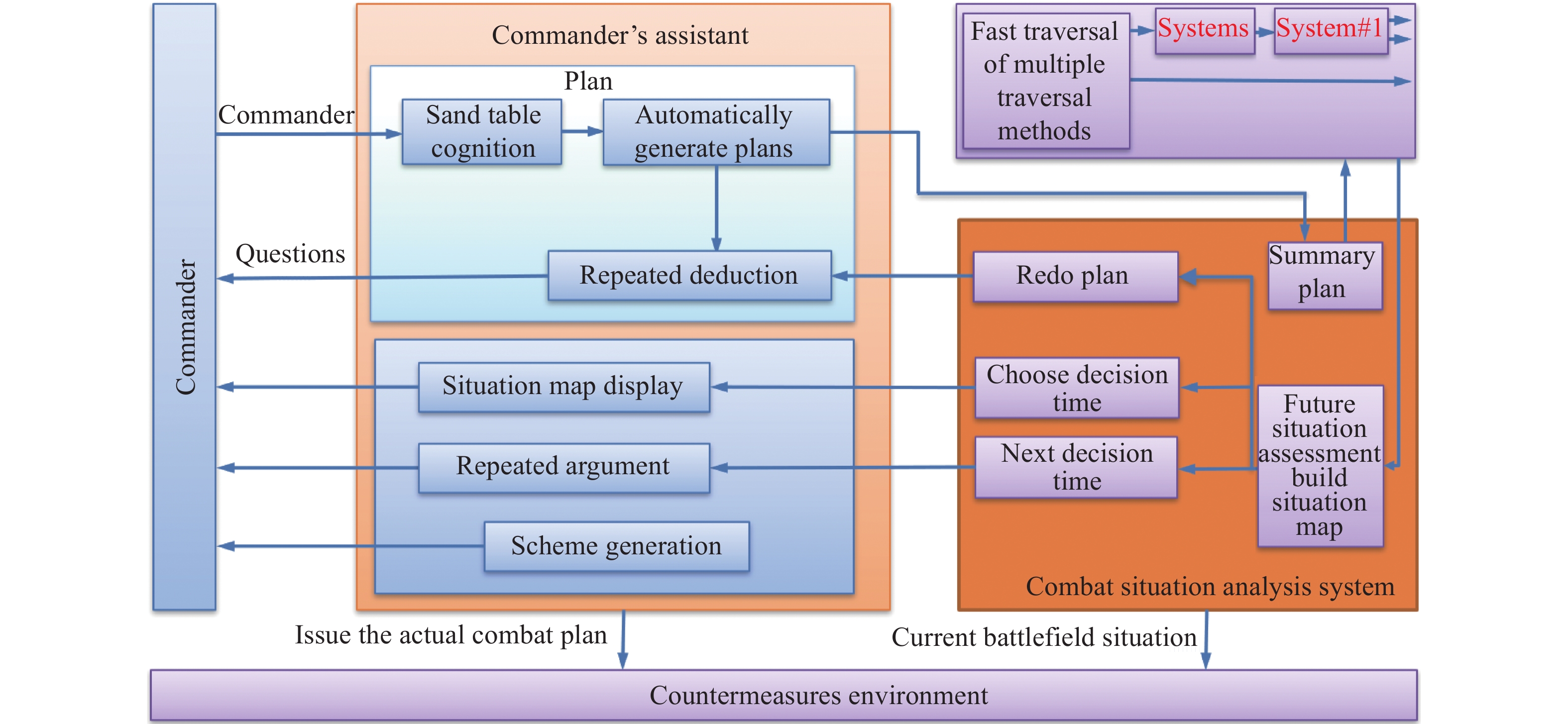

Fig 8
Examples of intelligent agent communication networks"

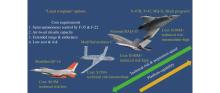
Fig 9
The loyal wingman"

| 1 | XIN X. Multi-domain unmanned systems at the frontier of the future battlefield. Beijing: Defense Express, 2022. (in Chinese) |
| 2 | LI K Research and application of situation awareness. Scientific and Technological Innovation, 2022, 3 (1): 55- 77. |
| 3 | ZHANG J, QU H, DING X Z UAV swarm operations and its key technologies. Unmanned Vehicles, 2018, 21 (4): 46- 51. |
| 4 | XING G, LIU W Joint all-domain operations with unmanned operations as the main style. Military Digest, 2021, (10): 32- 36. |
| 5 | TIAN B L, LI Z Y, WU S Y, et al Reentry trajectory optimization, guidance and control methods for reusable launch vehicles: review. Acta Aeronautica et Astronautica Sinica, 2020, 41 (1): 624072. |
| 6 | WAN Z W, LI X Y. Development status and trend of U.S. army ground unmanned combat system. Ship Electronic Engineering, 2022, 42(3): 17−19. |
| 7 | MA Z Y, HE M, LIU Z Y, et al. Survey of unmanned aerial vehicle cooperative control. Journal of Computer Applications, 2021, 41(5): 1477−1483. |
| 8 | PANG W Q, HU Y J, LI W G, et al Research on multi-UAV cooperative reconnaissance mission planning methods: an overview. Telecommunication Engineering, 2019, 59 (6): 741- 748. |
| 9 | YAO C H, AN L. Autonomous collaborative optimization of UAV swarms for multi-mode. Telecommunication Engineering, 2022. https://kns.cnki.net/kcms/detail/51.1267.TN.20220601.1139.002html. |
| 10 | LIU B, YI J C, YAO L, et al. Situational awareness ontology for threat from space cyber operations. Systems Engineering and Electronics, 2022. https://kns.cnki.net/kcms/detail/11.2422.TN.20220330.1628.007.html. (in Chinese) |
| 11 | WANG X F, LI D, LU W W, et al Analysis of example of unmanned vehicle swarms and research of operation. Ship Electronic Engineering, 2020, 40 (11): 16- 20. |
| 12 | ZOU L Y, ZHANG M Z, BAI J R, et al A survey of modeling and simulation of UAS swarm operation. Tactical Missile Technology, 2021, 3, 98- 108. |
| 13 | WANG K. Research on U.S. army UAV combat development under the background of intelligentization. Artificial Intelligent. 2022, 42(4): 14−17. (in Chinese) |
| 14 |
MESKIN N, KHORASANI K Actuator fault detection and isolation for a network of unmanned vehicles. IEEE Trans. on Automatic Control, 2009, 54 (4): 835- 840.
doi: 10.1109/TAC.2008.2009675 |
| 15 |
KELIRIS C, POLYCARPOU M M, PARISINI T A distributed fault detection filtering approach for a class of interconnected continuous-time nonlinear systems. IEEE Trans. on Automatic Control, 2013, 58 (8): 2032- 2047.
doi: 10.1109/TAC.2013.2253231 |
| 16 |
ZHANG X D, ZHANG Q Distributed fault diagnosis in a class of interconnected nonlinear uncertain systems. International Journal of Control, 2012, 85 (11): 1644- 1662.
doi: 10.1080/00207179.2012.696146 |
| 17 | GUO Z Z Scheme of self-healing control frame of power grid. Automation of Electric Power Systems, 2005, 29 (10): 85- 91. |
| 18 | ZHANG Y W, LIU J C, ZHANG S Y Reliable control for a class of interconnected systems. Control and Decision, 2005, 20 (8): 901- 904, 908. |
| 19 | LIU L, WANG Z S, ZHANG H G. Adaptive fault-tolerant tracking control for MIMO discrete-time systems via reinforcement learning algorithm with less learning parameters. IEEE Trans. on Automation Science and Engineering. DOI: 10.1109/TASE.2016.2517155. |
| 20 | WANG Z S, LIU L, ZHANG H G, et al. Fault-tolerant controller design for a class of nonlinear MIMO discrete-time systems via online reinforcement learning algorithm. IEEE Trans. on Systems, Man, and Cybernetics: Systems, 2016, 46(5): 611−622. |
| 21 |
LIU L, WANG Z S, ZHANG H G Adaptive NN fault-tolerant control for discrete-time systems in triangular forms with actuator fault. Neurocomputing, 2015, 152, 209- 221.
doi: 10.1016/j.neucom.2014.10.076 |
| 22 | ZHANG J L, YAN J G, ZHANG P Multi-UAV formation forming reconfiguration control based on back-stepping method. Acta Aeronautica et Astronautica Sinica, 2019, 40 (11): 208- 220. |
| 23 | STIPANOVIC D M, NALHAN G, TEO R, et al Decentralized overlapping control of a formation of unmanned aerial vehicles. Automatica, 2004, 40 (8): 1285- 1296. |
| 24 | XU X Q, WANG Y M, MAO Y Path planning of mobile robot based on improved artificial potential field. Journal of Computer Application, 2020, 40 (12): 3508- 3512. |
| 25 | JING J, REN H J Study on path planning of mobile robot based on improved artificial potential field method. Automation Application, 2017, (8): 80- 81. |
| 26 | WU Y B, LI X G, CHEN D R, et al Obstacle avoidance research of the automated guided vehicle based on improved artificial potential field method with chaotic optimization. Science & Technology Innovation Herald, 2017, 14 (17): 150- 153. |
| 27 | WANG X B, SONG G D, YANG F UAV active SLAM trajectory programming based on optimal control. Ordnance Industry Automation, 2018, 37 (12): 55- 57. |
| 28 | CHENG C, ZHANG Y, CHU H R, el at Simulation of distribution cooperative formation control for multi-UAVs. Computer Simulation, 2019, 36 (5): 31- 37. |
| 29 | QU Y H, DING Y S, HAO K G, et al March-inspired multi-robot compact formation strategy. CAAI Transactions on Intelligent Systems, 2018, (5): 673- 679. |
| 30 | MAO Q, LI X M, WANG Z J Formation and reformation control method for UAVs formation shape based on rules. System Engineering and Electronics, 2019, 41 (5): 1118- 1126. |
| 31 | WANG W N. Research on formation reconfiguration and formation keeping control algorithm for three-dimensional unmanned aerial vehicles. Shenyang: Shenyang Aerospace University, 2018. (in Chinese) |
| 32 |
STIPANOVIC D M, NALHAN G, TEO R, et al Decentralized overlapping control of a formation of unmanned aerial vehicles. Automatica, 2004, 40 (8): 1285- 1296.
doi: 10.1016/j.automatica.2004.02.017 |
| 33 | BRAD S, GU Y, MARCELLO R N, et al. Three-aircraft formation flight experiment. Proc. of the IEEE Mediterranean Conference on Control and Automation, 2006. DOI: 10.1109/MED.2006.328710. |
| 34 |
KEVICZKY T, BORRELLI F, FREGENE K, et al Decentralized receding horizon control and coordination of autonomous vehicle formations. IEEE Trans. on Control Systems Technology, 2008, 16 (1): 19- 33.
doi: 10.1109/TCST.2007.903066 |
| 35 |
ROSA M R, BALDI S, WANG X, et al Adaptive hierarchical formation control for uncertain Euler-Lagrange systems using distributed inverse dynamics. European Journal of Control, 2019, 48, 52- 65.
doi: 10.1016/j.ejcon.2018.11.001 |
| 36 |
ROCCHI A B C Decentralized hybrid model predictive control of a formation of unmanned aerial vehicles. IFAC Proceedings Volumes, 2011, 44 (1): 11900- 11906.
doi: 10.3182/20110828-6-IT-1002.00942 |
| 37 |
ARCAK M, SERON M, BRASLAVSKY J, et al Robustification of backstepping against input unmodeled dynamics. IEEE Trans. on Automatic Control, 2000, 45 (7): 1358- 1363.
doi: 10.1109/9.867048 |
| 38 | KRSTIC M, KANELLAKOPOULOS I, KOKOTOVIC P V. Nonlinear and adaptive control design. New York: Wiley-Inter Science, 1995. |
| 39 | FASANO G Multisensor based fully autonomous non-cooperative collision avoidance system for UAVs. Journal of Aerospace Computing Information & Communication, 2008, 5 (10): 338- 360. |
| 40 | KUWATA Y, HOW J P. Robust cooperative decentralized trajectory optimization using receding horizon MILP. Proc. of the American Control Conference, 2007: 522−527. |
| 41 |
FLOCCHINI P, PRENCIPE G, SANTORO N, et al Distributed computing by mobile robots: uniform circle formation. Distributed Computing, 2017, 30, 413- 457.
doi: 10.1007/s00446-016-0291-x |
| 42 | BRAD S, GU Y, MARCELLO R N, et al. 3-aircraft formation flight experiment. Proc. of the IEEE 14th Mediterranean Conference on Control and Automation, 2006. DOI: 10.1109/MED.2006.328710. |
| 43 | HOW J, KING E, KUWATA Y. Flight demonstrations of cooperative control for UAV teams. Proc. of the 3rd AIAA Unmanned Unlimited Technical Conference, Workshop and Exhibit, 2004: 1−9. |
| 44 |
ZAVLNOS M M, PAPPAS G J Potential fields for maintaining connectivity of mobile networks. IEEE Trans. on Robotics, 2007, 23 (4): 812- 816.
doi: 10.1109/TRO.2007.900642 |
| 45 | ATINC G M, STIPANOVIC D M, VOULGARIS P G, et al. Collision-free trajectory tracking while preserving connectivity in unicycle multi-agent systems. Proc. of the IEEE American Control Conference, 2013: 5392−5397. |
| 46 | WILLIAM G, WAGENER N, GOLDFAIN B, et al. Information theoretic MPC for model-based reinforcement learning. Proc. of the IEEE International Conference on Robotics and Automation, 2017: 1714−1721. |
| 47 |
OLFATI-SABER R, FAX J A, MURRAY R M Consensus and cooperation in networked multi-agent systems. Proceedings of the IEEE, 2007, 95 (1): 215- 233.
doi: 10.1109/JPROC.2006.887293 |
| 48 | WEI R, SORENSEN N Distributed coordination architecture for multi-robot formation control. Robotics & Autonomous Systems, 2008, 56 (4): 324- 333. |
| 49 | REN W Consensus tracking under directed interaction topologies: algorithms and experiments. IEEE Trans. on Control Systems Technology, 2009, 18 (1): 230- 237. |
| 50 |
MENG Z, REN W, CAO Y, et al Leaderless and leader-following consensus with communication and input delays under a directed network topology. IEEE Trans. on Systems, Man, and Cybernetics, Part B (Cybernetics), 2011, 41 (1): 75- 88.
doi: 10.1109/TSMCB.2010.2045891 |
| 51 | YOSHIOKA C, NAMERIKAWA T. Observer-based consensus control strategy for multi-agent system with communication time delay. Proc. of the IEEE International Conference on Control Applications, 2008: 1037−1042. |
| 52 | KAWAKNMI H, NAMERIKAWA T. Cooperative target-capturing strategy for multi-vehicle systems with dynamic network topology. Proc. of the IEEE American Control Conference, 2009: 635−640. |
| 53 | KURIKI Y, NAMERIKAWA T. Formation control of UAVs with a fourth-order flight dynamics. Proc. of the IEEE Decision and Control, 2014: 6706−6711. |
| 54 | KURIKI Y, NNAMERIKAWA T. Consensus-based cooperative formation control with collision avoidance for a multi-UAV system. Proc. of the IEEE American Control Conference, 2014: 2077−2082. |
| 55 | ZHANG J L, YAN J G, ZHANG P, et al Collision avoidance of unmanned aerial vehicle formation based on consensus control algorithm. Journal of Xi’an Jiaotong University, 2018, 52 (9): 168- 174. |
| 56 | JENNIFER G, RAHUL R, KAMESH S. Aircraft conflict detection and resolution using mixed geometric and collision cone approaches. Proc. of the AIAA Guidance, Navigation, and Control Conference and Exhibit, 2004. DOI: 10.2514/6.2004-4879. |
| 57 | CHOI H, KIM Y, HWANG I. Vision-based reactive collision avoidance algorithm for unmanned aerial vehicle. Proc. of the AIAA Guidance, Navigation, and Control Conference, 2013. DOI: 10.257416.2011-6603. |
| 58 | PORTILLA E, FUNG A, CHEN W Z, et al. Sense and avoid & traffic alert and collision avoidance system integration for unmanned aerial system. Proc. of the AIAA Infotech@Aerospace Conference and Exhibit, 2007. DOI: 10.2514/6.2007-3004. |
| 59 | FASANO G, ACCARDO D, MOCCIA A, et al Multi-sensor-based fully autonomous non-cooperative collision avoidance system for unmanned air vehicles. Journal of Aerospace Computing Information & Communication, 2008, 5 (10): 338- 360. |
| 60 | LI C X Research on key technologies of network security situational awareness system. Electronic Technology & Software Engineering, 2022, 28 (1): 231- 233. |
| 61 | WU Y, LI L, SHEN C, et al. AFRL seeks network communication technology for autonomous system of “Loyal Wingman” project. http://war.163.com/1. |
| 62 | YANG C F. The effectiveness evaluation for cooperative combat of manned vehicle/unmanned aerial vehicle based on threat environment. Proc. of the 8th Chinese Aeronautical Society Youth Science and Technology Forum, 2018: 717−722. (in Chinese) |
| 63 | ERIC B, MARCO D, GUY T. Swarm intelligence-from natural to artificial systems. Oxford: Oxford Univertity, 1999. |
| [1] | Minggang YU, Yanjie NIU, Xueda LIU, Dongge ZHANG, Peng ZHENG, Ming HE, Ling LUO. Adaptive dynamic reconfiguration mechanism of unmanned swarm topology based on an evolutionary game [J]. Journal of Systems Engineering and Electronics, 2023, 34(3): 598-614. |
| [2] | Zhigeng FANG, Shuang WU, Xiaoli ZHANG, Yunke SUN. ADC-GERT network parameter estimation model for mission effectiveness of joint operation system [J]. Journal of Systems Engineering and Electronics, 2021, 32(6): 1394-1406. |
| [3] | Lin Yang, Minggang Yu, and Qingchao Dong. Autonomous process collaboration framework for C4ISR system interoperation#br# [J]. Journal of Systems Engineering and Electronics, 2017, 28(6): 1098-1113. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||