
Journal of Systems Engineering and Electronics ›› 2024, Vol. 35 ›› Issue (1): 233-241.doi: 10.23919/JSEE.2023.000166
• CONTROL THEORY AND APPLICATION • Previous Articles
Shihua ZHANG( ), Xiaohui QI(), Sen YANG()
), Xiaohui QI(), Sen YANG()
Received:2022-10-20
Online:2024-02-18
Published:2024-03-05
Contact:
Shihua ZHANG
E-mail:zsh3991171@126.com;qi-xh@163.com;sanmu_oec@163.com
About author:Supported by:Shihua ZHANG, Xiaohui QI, Sen YANG. An extended state observer with adjustable bandwidth for measurement noise[J]. Journal of Systems Engineering and Electronics, 2024, 35(1): 233-241.
Add to citation manager EndNote|Reference Manager|ProCite|BibTeX|RefWorks
Fig 1
The desired trajectory $ {\boldsymbol{r}}{\boldsymbol{(t)}} $ and total disturbance $ {\boldsymbol{d}}{\boldsymbol{(t,x)}} $"
Table 1
Mean error indexes"
| Index | Expression |
Table 2
LESO mean error indexes with the bandwidth changing from 4 to 10"
| Index | wo | ||||||
| 4 | 5 | 6 | 7 | 8 | 9 | 10 | |
| 1.76 | 1.68 | 1.65 | 1.66 | 1.72 | 1.74 | 1.77 | |
| 10.79 | 10.73 | 11.53 | 12.75 | 14.85 | 16.83 | 17.21 | |
| 26.03 | 26.32 | 28.73 | 33.48 | 40.43 | 48.91 | 59.03 | |

Fig 2
LESO performances in estimating compound disturbances with measurement noise"
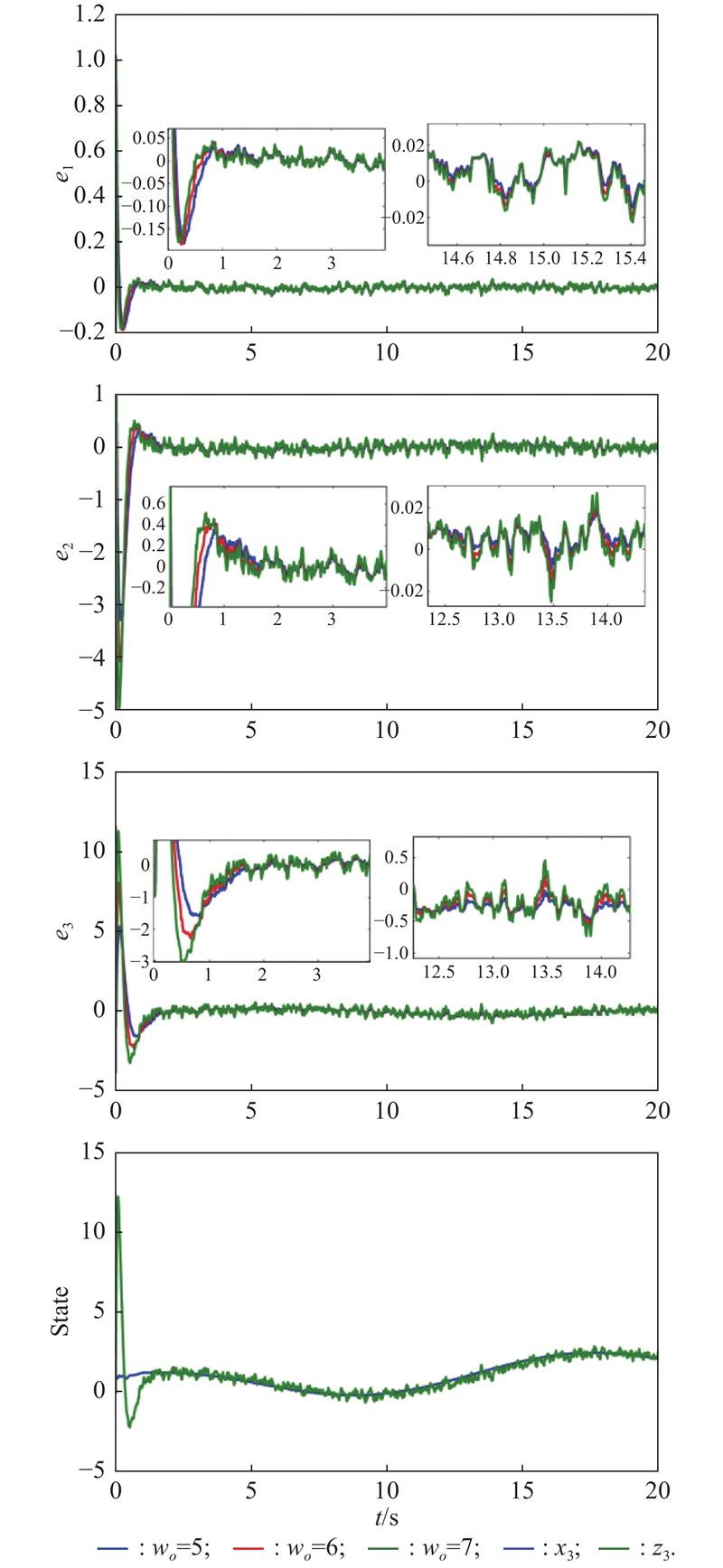
Table 3
Rise time and peakings of LESO for bandwidth changing from 5 to 7"
| Index | |||||||||
| 5 | 6 | 7 | |||||||
| 0.7 | 0.64 | 2.09 | 0.62 | 0.52 | 1.56 | 0.5 | 0.46 | 1.34 | |
| 0.04 | 0.39 | 0.53 | 0.04 | 0.43 | 0.62 | 0.05 | 0.51 | 0.73 | |
Table 4
BESO mean error indexes with the bandwidth changing from 4 to 10"
| Index | |||||||
| 4 | 5 | 6 | 7 | 8 | 9 | 10 | |
| 2.84 | 2.76 | 2.68 | 2.59 | 2.78 | 2.66 | 2.77 | |
| 19.91 | 23.34 | 25.85 | 27.97 | 34.49 | 35.36 | 39.93 | |
| 39.10 | 53.34 | 70.59 | 89.23 | 119.52 | 142.82 | 171.19 | |
Table 5
Rise time and peakings of BESO for bandwidth changing from 5 to 7"
| Index | |||||||||
| 5 | 6 | 7 | |||||||
| 0.64 | 0.57 | 2.22 | 0.51 | 0.47 | 2.22 | 0.47 | 0.39 | 2.22 | |
| 0.06 | 0.61 | 0.94 | 0.06 | 0.71 | 1.26 | 0.06 | 0.97 | 1.64 | |

Fig 3
BESO performances in estimating compound disturbances with measurement noise"
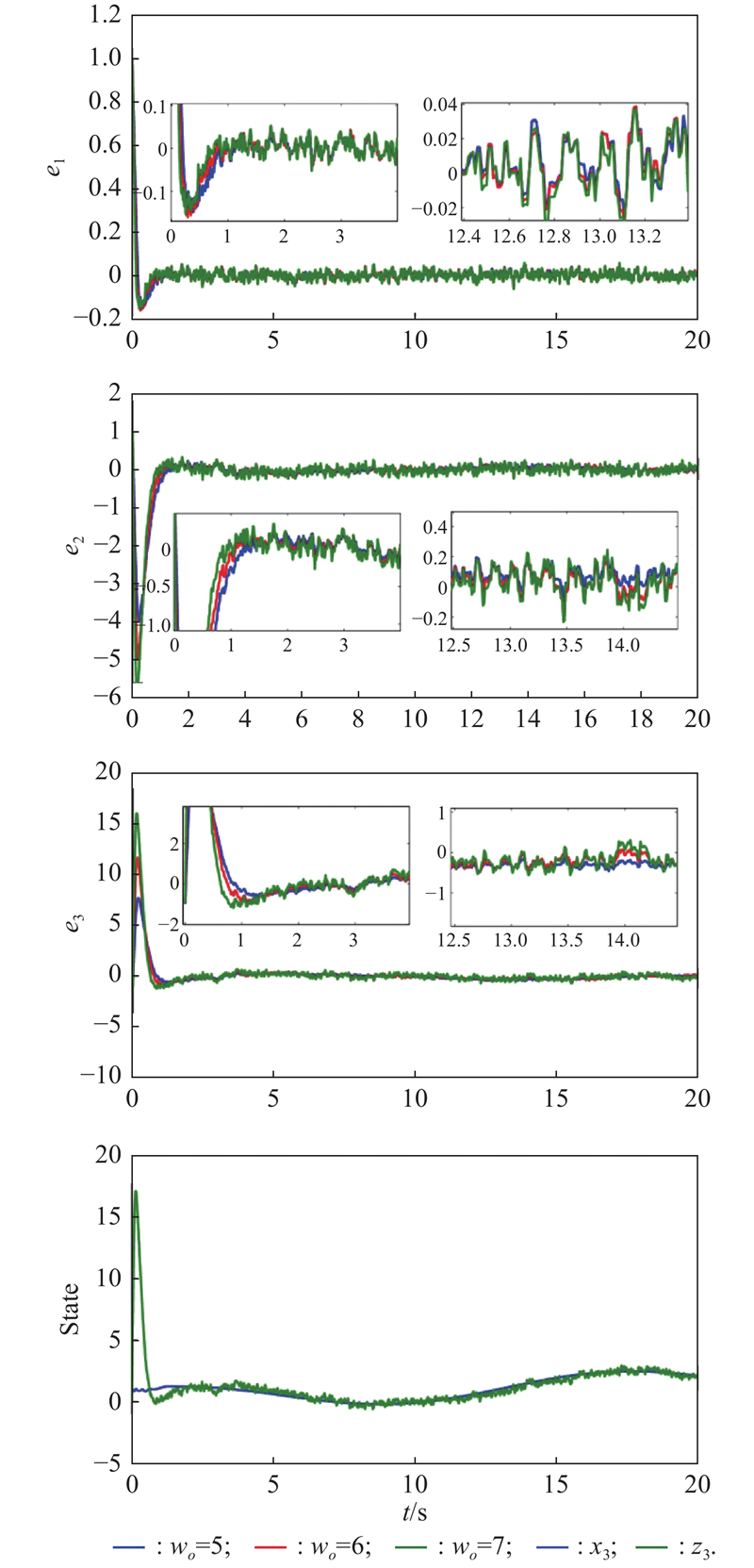
Table 6
ABESO mean error indexes with the bandwidth changing from 4 to 10"
| Index | |||||||
| 4 | 5 | 6 | 7 | 8 | 9 | 10 | |
| 1.57 | 1.50 | 1.54 | 1.57 | 1.67 | 1.72 | 1.87 | |
| 8.97 | 8.81 | 10.10 | 11.03 | 14.13 | 15.63 | 21.54 | |
| 23.26 | 22.67 | 25.05 | 28.37 | 38.32 | 46.61 | 63.23 | |
Table 7
Rise time and peakings of ABESO for bandwidth changing from 5 to 7"
| Index | |||||||||
| 5 | 6 | 7 | |||||||
| 0.63 | 0.54 | 2.09 | 0.51 | 0.47 | 1.56 | 0.48 | 0.41 | 1.33 | |
| 0.04 | 0.36 | 0.53 | 0.04 | 0.41 | 0.62 | 0.04 | 0.48 | 0.73 | |
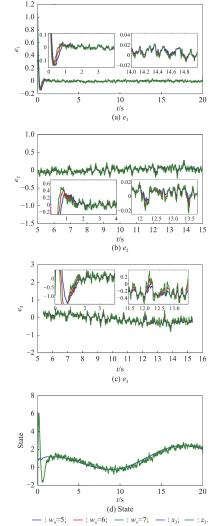
Fig 4
ABESO performances in estimating compound disturbances with measurement noise"
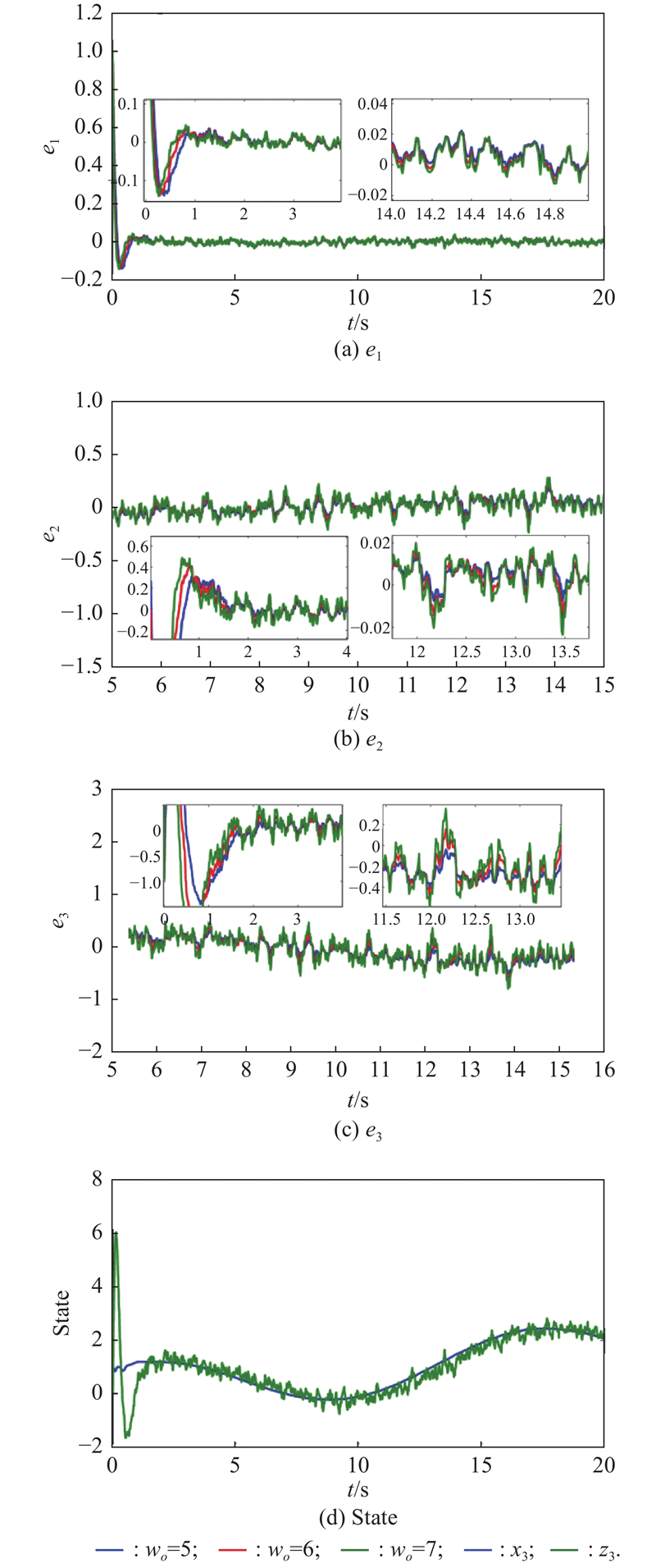
Table 8
Comparison of performance indexes of ABESO and LESO with $ {{\boldsymbol{w}}_{\boldsymbol{o}}} = {\boldsymbol{7}} $"
| Algorithm | Index | |||||
| LESO | 1.66 | 12.75 | 33.48 | 0.5 | 0.46 | 1.34 |
| BESO | 2.59 | 27.97 | 89.23 | 0.47 | 0.39 | 2.22 |
| ABESO | 1.57 | 11.03 | 28.37 | 0.48 | 0.41 | 1.33 |
| Reduction1/% | 4.89 | 13.46 | 15.28 | 4 | 10.87 | 0.75 |
| Reduction2/% | 39.26 | 60.56 | 68.21 | -2.13 | -5.13 | 40.09 |
| 1 |
HAN J Q From PID to active disturbance rejection control. IEEE Trans. on Industrial Electronics, 2009, 56 (3): 900- 906.
doi: 10.1109/TIE.2008.2011621 |
| 2 |
SHI D, WU Z, CHOU W S Generalized extended state observer based high precision attitude control of quadrotor vehicles subject to wind disturbance. IEEE Access, 2018, 6, 32349- 32359.
doi: 10.1109/ACCESS.2018.2842198 |
| 3 | GRELEWICZ P, NOWAK P, CZECZOT J, et al Increment count method and its PLC-based implementation for autotuning of reduced-order ADRC with smith predictor. IEEE Trans. on Industrial Electronics, 2021, 68 (12): 12554- 12564. |
| 4 | TIAN J Y, ZHANG S F, YANG H B Enhanced extended state observer based control for missile acceleration autopilot. ISA Transactions, 2020, 96, 143- 154. |
| 5 |
SUN H, MADONSKI R, LI S H, et al Composite control design for dystems with uncertainties and noise using combined extended state observer and kalman filter. IEEE Trans. on Industrial Electronics, 2022, 69 (4): 4119- 4128.
doi: 10.1109/TIE.2021.3075838 |
| 6 |
ABDUL-ADHEEM W R, AZAR A T, IBRAHEEM K I, et al Novel active disturbance rejection control based on nested linear extended state observers. Applied Sciences, 2020, 10 (12): 4069.
doi: 10.3390/app10124069 |
| 7 |
LAKOMY K, MADONSKI R Cascade extended state observer for active disturbance rejection control applications under measurement noise. ISA Transactions, 2021, 109, 1- 10.
doi: 10.1016/j.isatra.2020.09.007 |
| 8 |
SUN L, ZHENG Z W Disturbance-observer-based robust backstepping attitude stabilization of spacecraft under input saturation and measurement uncertainty. IEEE Trans. on Industrial Electronics, 2017, 64 (10): 7994- 8002.
doi: 10.1109/TIE.2017.2694349 |
| 9 | WANG H Y, ZUO Z Q, WANG Y J, et al Composite nonlinear extended state observer and its application to unmanned ground vehicles. Control Engineering Practice, 2021, 109, 10734. |
| 10 | XUE W C, ZHANG X C, SUN L, et al Extended state filter based disturbance and uncertainty mitigation for nonlinear uncertain systems with application to fuel cell temperature control. IEEE Trans. on Industrial Electronics, 2020, 67 (12): 10682- 10692. |
| 11 |
BATTILOTTI S Robust observer design under measurement noise with gain adaptation and saturated estimates. Automatica, 2017, 81, 75- 86.
doi: 10.1016/j.automatica.2017.02.008 |
| 12 |
AHRENS J H, KAALIL H K High-gain observers in the presence of measurement noise: a switched-gain approach. Automatica, 2009, 45 (4): 936- 943.
doi: 10.1016/j.automatica.2008.11.012 |
| 13 |
YANG L Y, LIU L L, ZHANG J A bi-bandwidth extended state observer for a system with measurement noise and its application to aircraft with abrupt structural damage. Aerospace Science and Technology, 2021, 114, 106742.
doi: 10.1016/j.ast.2021.106742 |
| 14 |
PRASOV A A, KHALIL H K A nonlinear high-gain observer for systems with measurement noise in a feedback control framework. IEEE Trans. on Automatic Control, 2013, 58 (3): 569- 580.
doi: 10.1109/TAC.2012.2218063 |
| 15 | GAO Z Q. Scaling and bandwidth-parameterization based controller tuning. Proc. of the American Control Conference, 2003: 4989−4996. |
| 16 | LIN H, ANTSAKLIS P J Stability and stabilizability of switched linear systems: a survey of recent results. IEEE Trans. on Automatic Control, 2009, 54 (2): 308- 322. |
| [1] | Xinjian MA, Shiqian LIU, Huihui CHENG. Civil aircraft fault tolerant attitude tracking based on extended state observers and nonlinear dynamic inversion [J]. Journal of Systems Engineering and Electronics, 2022, 33(1): 180-187. |
| [2] | Yiru ZOU, Chunsheng LIU, Ke LU. Extended state observer based smooth switching control for tilt-rotor aircraft [J]. Journal of Systems Engineering and Electronics, 2020, 31(4): 815-825. |
| [3] | Ligang GONG, Qing WANG, Chaoyang DONG. Switching disturbance rejection attitude control of near space vehicles with variable structure [J]. Journal of Systems Engineering and Electronics, 2019, 30(1): 167-179. |
| [4] | Yuhang YUN, Shengjing TANG, Jie GUO, Wei SHANG. Robust controller design for compound control missile with fixed bounded convergence time [J]. Journal of Systems Engineering and Electronics, 2018, 29(1): 116-133. |
| [5] | Wei Shang, Shengjing Tang, Jie Guo, Yueyue Ma, and Yuhang Yun. Robust sliding mode control with ESO for dual-control missile [J]. Journal of Systems Engineering and Electronics, 2016, 27(5): 1073-1082. |
| [6] | Yueyue Ma, Jie Guo, and Shengjing Tang. BTT autopilot design for agile missiles with aerodynamic uncertainty [J]. Journal of Systems Engineering and Electronics, 2015, 26(4): 802-. |
| [7] | Bingqiang Li, Hui Lin, and Hualing Xing. Adaptive adjustment of iterative learning control gain matrix in harsh noise environment [J]. Journal of Systems Engineering and Electronics, 2013, 24(1): 128-134. |
| [8] | Ren Haipeng & Liu Ding. Synchronization of chaos using radial basis functions neural networks [J]. Journal of Systems Engineering and Electronics, 2007, 18(1): 83-88. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||