
Journal of Systems Engineering and Electronics ›› 2024, Vol. 35 ›› Issue (4): 999-1012.doi: 10.23919/JSEE.2024.000081
• CONTROL THEORY AND APPLICATION • Previous Articles
Yanjun YU1( ), Chengfei YUE2,*(), Huayi LI1(), Yunhua WU3(), Xueqin CHEN1()
), Chengfei YUE2,*(), Huayi LI1(), Yunhua WU3(), Xueqin CHEN1()
Received:2023-03-14
Online:2024-08-18
Published:2024-08-06
Contact:
Chengfei YUE
E-mail:yuyanjun9511@163.com;yuechengfei@hit.edu.cn;lihuayi@hit.edu.cn;yunhuawu@nuaa.edu.cn;cxqhit@163.com
About author:Supported by:Yanjun YU, Chengfei YUE, Huayi LI, Yunhua WU, Xueqin CHEN. Modified filter for mean elements estimation with state jumping[J]. Journal of Systems Engineering and Electronics, 2024, 35(4): 999-1012.
Add to citation manager EndNote|Reference Manager|ProCite|BibTeX|RefWorks
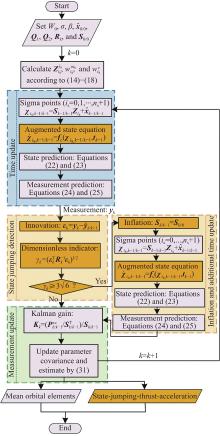
Fig 1
Procedures of the MASUKF-based MOEs estimator"
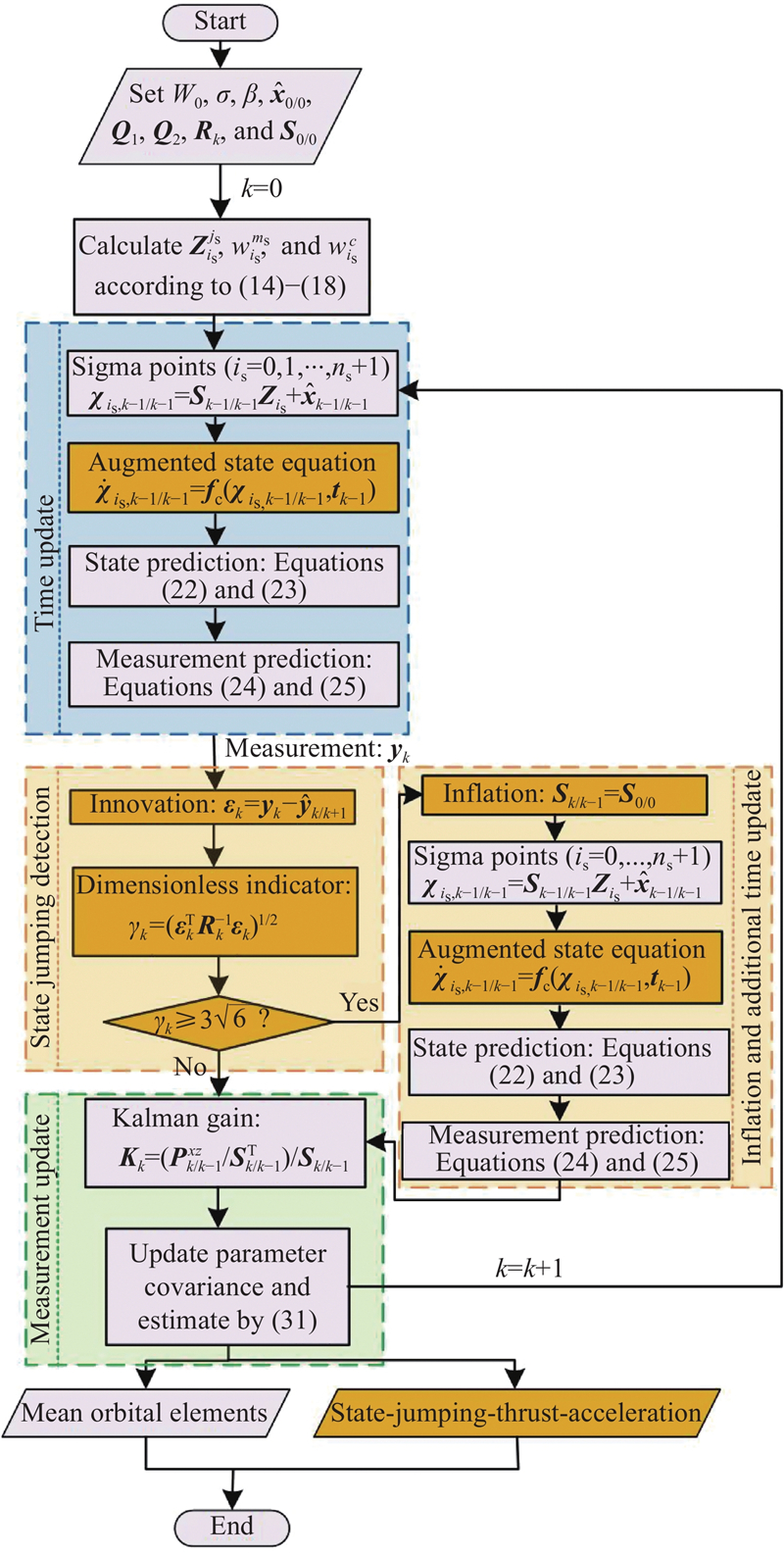
Table 1
Initial MOEs values"
| Parameter | Value |
| Semi-major axis/km | |
| Eccentricity | 0.02 |
| Inclination/(°) | 45 |
| RAAN/(°) | 20 |
| Argument of the periapsis/(°) | 20 |
| Mean anomaly/(°) | 20 |
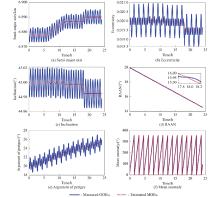
Fig 2
Sample single simulation comparing OOEs and estimated MOEs"
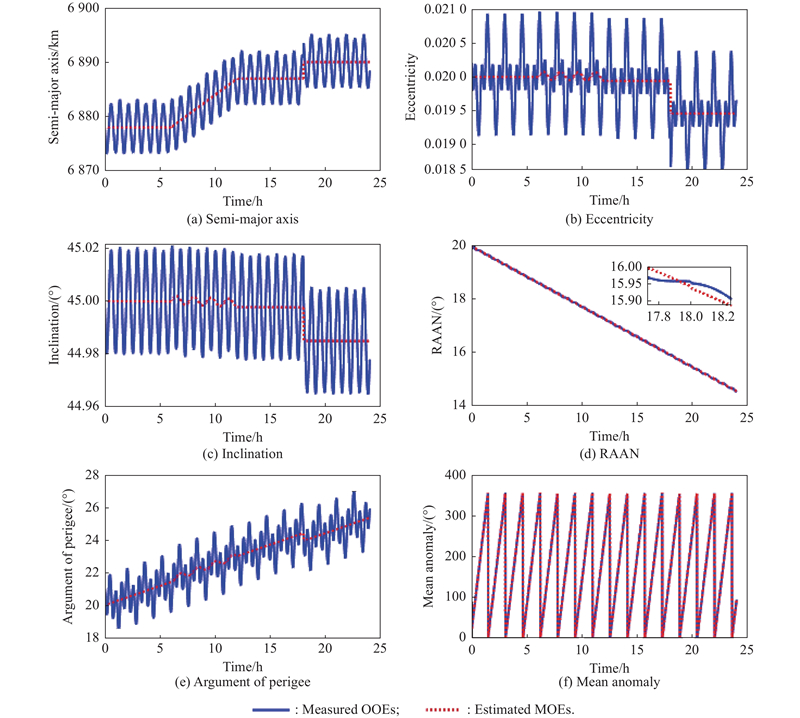
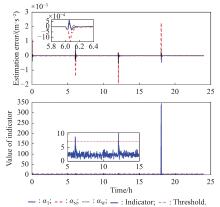
Fig 3
Thrust acceleration estimation error and the variation of the indicator"
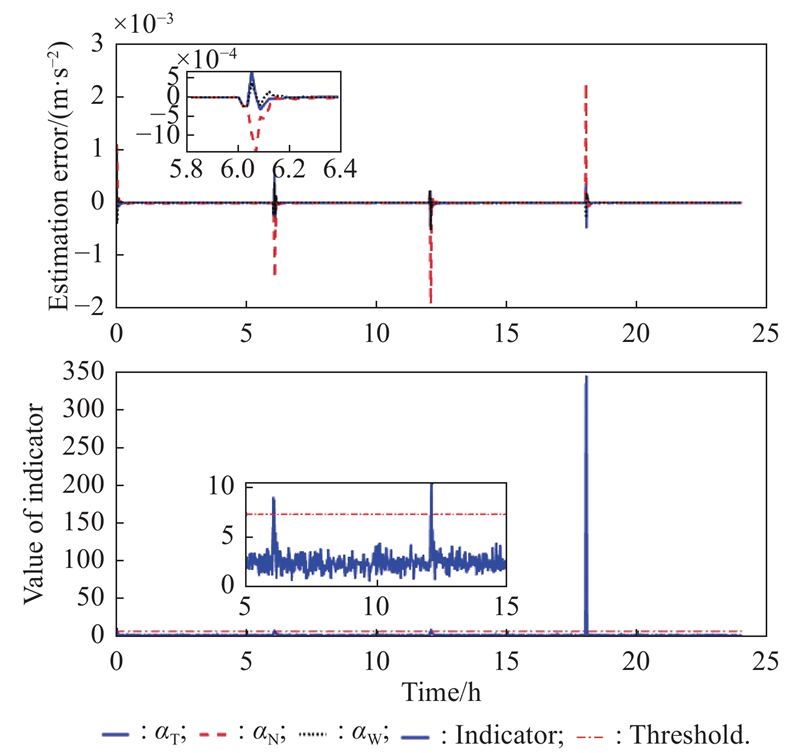

Fig 4
Sample single simulation run comparing mean-elements estimation errors as obtained from SRUKF and MASUKF"
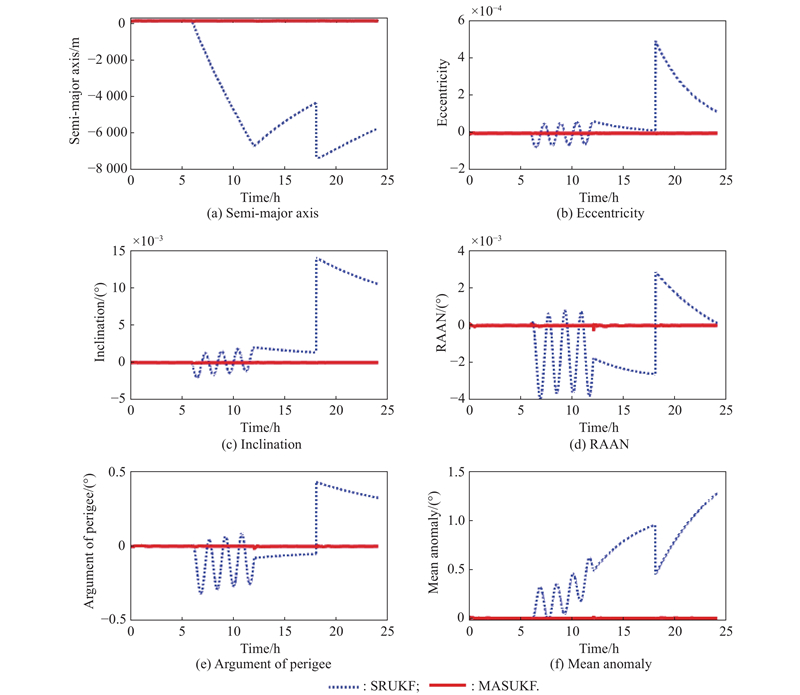
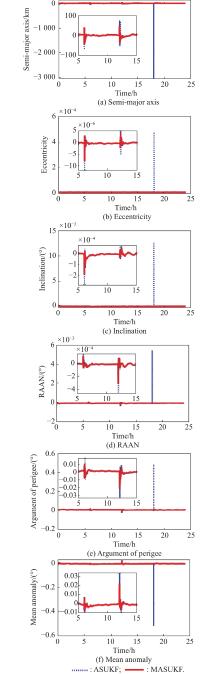
Fig 5
Sample single simulation run comparing mean-elements estimation errors as obtained from ASUKF and MASUKF"
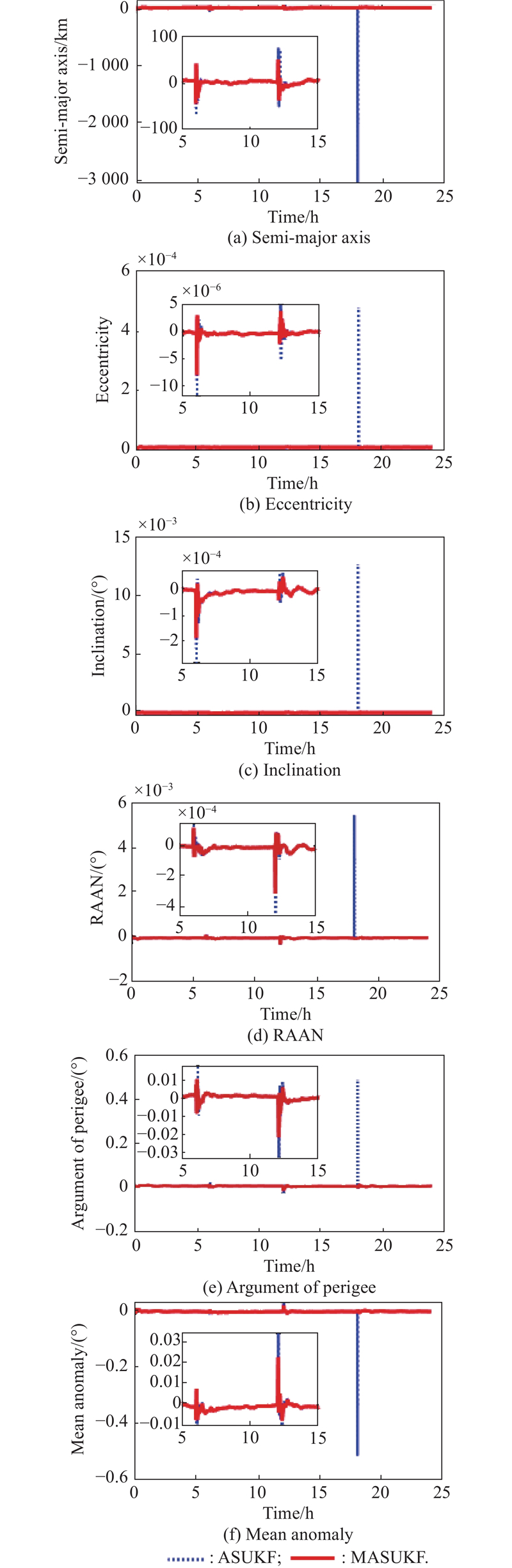

Fig 6
Comparison between RMSE of estimated MOEs using MASUKF and DM method"
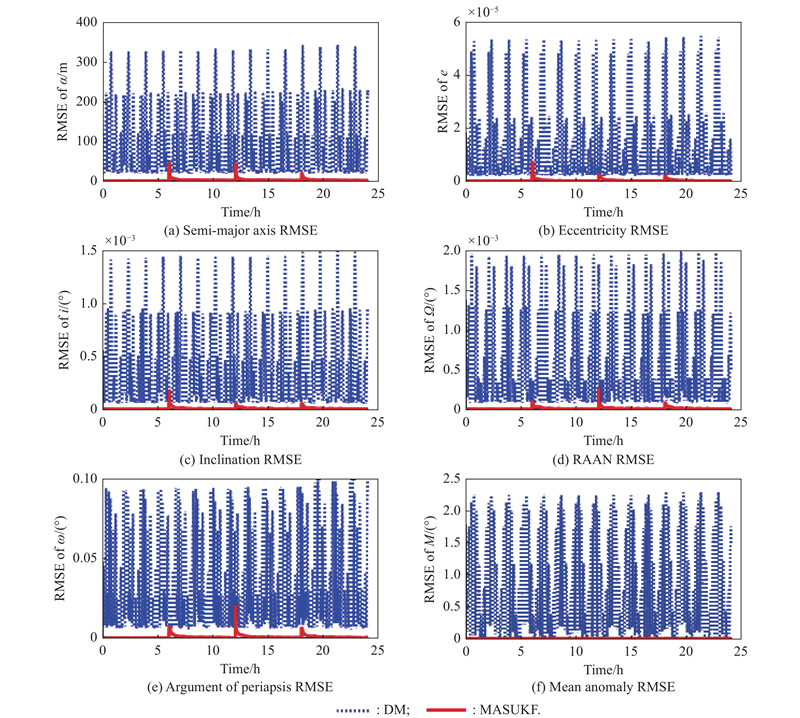
Table 2
ARMSE of MASUKF and DM method"
| ARMSE parameter | Method | |
| MASUKF | DM | |
| Semi-major axis/m | 2.855 | 104.1 |
| Eccentricity | 2.439×10−7 | 1.421×10−5 |
| Inclination/(°) | 6.110×10−6 | 4.292×10−4 |
| RAAN/(°) | 8.797×10−6 | 6.311×10−4 |
| Argument of the periapsis/(°) | 6.703×10−4 | 3.677×10−2 |
| Mean anomaly/(°) | 7.027×10−4 | |
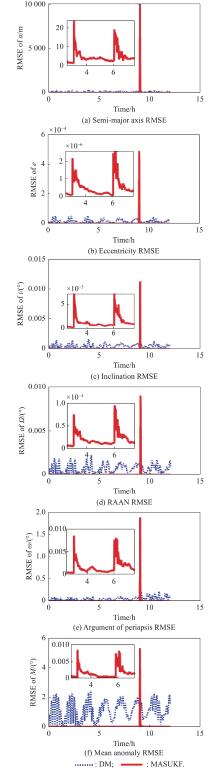
Fig 7
RMSE comparison between DM method and MASUKF"
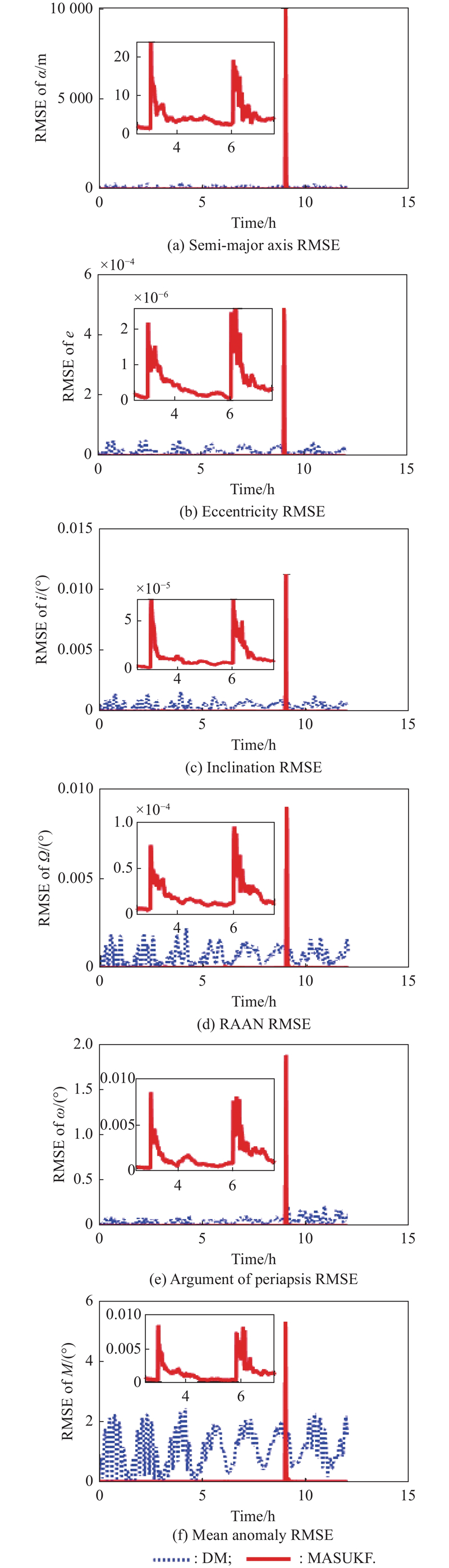
Table 3
ARMSE of MASUKF and DM method in the time domain"
| ARMSE parameter | Method | |
| MASUKF | DM | |
| Semi-major axis/m | 3.655 | 127.3 |
| Eccentricity | 3.529×10−7 | 1.747×10−5 |
| Inclination/(°) | 9.440×10−6 | 5.167×10−4 |
| RAAN/(°) | 1.415×10−5 | 7.648×10−4 |
| Argument of periapsis/(°) | 1.050×10−3 | 6.480×10−2 |
| Mean anomaly/(°) | 1.105×10−4 | 1.210 |
Fig 8
Variation of delay time with time step and magnitude of state-jumping-thrust-acceleration"
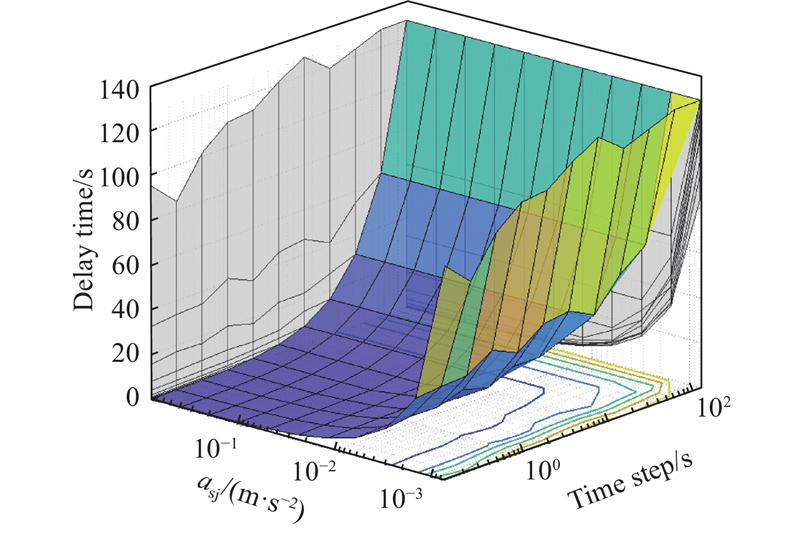
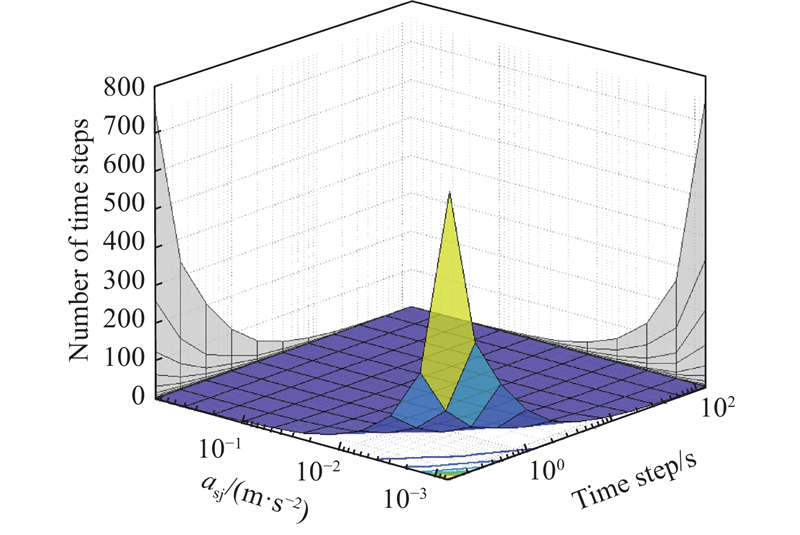
Fig 9
Variation of the number of time steps contained in delay time with time step and magnitude of state-jumping-thrust-acceleration"
| 1 | CAO X, LI N, QIU S, et al Research on the method of searching and tracking of the time-sensitive target through the mega-constellation. Aerospace Science and Technology, 2023, 137, 108299. |
| 2 | INIGO D P, BRUCE G C, EDWARD F C A technical comparison of three low earth orbit satellite constellation systems to provide global broadband. Acta Astronautica, 2019, 159 (6): 123- 135. |
| 3 |
TAO X F, LI Z, XU C, et al Track-to-object association algorithm based on TLE filtering. Advances in Space Research, 2021, 67 (8): 2304- 2318.
doi: 10.1016/j.asr.2021.01.036 |
| 4 | KUAI Z Z, CAO X L, SHEN H X, et al. Maneuver planning of geostationary satellites using mean orbital elements. Proc. of the Chinese Automation Congress, 2020: 6596−6600. (in Chinese) |
| 5 | PAN X, XU M, DONG Y F Low-thrust displaced orbits by weak Hamiltonian-structure-preserving control. Communications in Nonlinear Science and Numerical Simulation, 2018, 62 (9): 282- 306. |
| 6 | ASRAF A, SURAYUDA R H, RIBAH A Z, et al. Determination of mean orbital elements using GPS data for LAPAN satellite daily operation. Proc. of the IEEE International Conference on Aerospace Electronics and Remote Sensing Technology, 2021. DOI: 10.1109/ICARES53960.2021.9665177. |
| 7 | KOZAI Y The motion of a close Earth satellite. Astronomical Journal, 1959, 64 (11): 367- 377. |
| 8 | KOZAI Y Effect of precession and nutation on the orbital elements of a close earth satellite. Astronomical Journal, 1960, 65 (10): 621- 623. |
| 9 | BROUWER D Solution of the problem of artificial satellite theory without drag. Astronomical Journal, 1959, 64 (11): 378- 396. |
| 10 | CHEN H Y, WU H Y, ZHOU M J, et al. Orbit engineering application and STK simulation for micro-satellite. Beijing: China Science Publishing & Media Ltd., 2016. (in Chinese) |
| 11 |
SETTY S, CEFOLA P, MONTENBRUCK O, et al Application of semi-analytical satellite theory orbit propagator to orbit determination for space object catalog maintenance. Advances in Space Research, 2016, 57 (10): 2218- 2233.
doi: 10.1016/j.asr.2016.02.028 |
| 12 | DUTT P, ANILKUMAR A K. Orbit propagation using semi-analytical theory and its applications in space debris field. Astrophysics and Space Science, 2017, 362: 35. |
| 13 | LARA M, SAN J F, HAUTESSERRES D, et al. A mean elements orbit propagator program for highly elliptical orbits. CEAS Space Journal, 2018, 10(5): 3−23. |
| 14 | NIE T, GURFIL P. Reducing inter-satellite drift of low Earth orbit constellations using short-periodic corrections. Celestial Mechanics and Dynamical Astronomy, 2021, 133: 19. |
| 15 | VNIE T, GURFIL P. Long-term evolution of orbital inclination due to third-body inclination. Celestial Mechanics and Dynamical Astronomy, 2021, 133: 1. |
| 16 | JULIER S, UHLMANN J K, DURRANT-WHYTE H. A new approach for filtering nonlinear systems. Proc. of the American Control Conference, 1995: 1628−1632. |
| 17 | MERWE R, WAN E. The square-root unscented Kalman filter for state and parameter-estimation. Proc. of the IEEE International Conference on Acoustics, 2001: 3461−3464. |
| 18 |
LI K Y, GUO Z K, ZHOU G J State estimation in range coordinate using range-only measurements. Journal of Systems Engineering and Electronics, 2022, 33 (3): 497- 510.
doi: 10.23919/JSEE.2022.000050 |
| 19 | GONG B C, WANG S, HAO M R, et al Range-based collaborative relative navigation for multiple unmanned aerial vehicles using consensus extended Kalman filter. Aerospace Science and Technology, 2021, 112, 106647. |
| 20 |
WANG K, CHEN T, XU S J Determination and estimation of differential mean orbital elements for formation-flying missions. Journal of Guidance, Control, and Dynamics, 2014, 37 (1): 86- 97.
doi: 10.2514/1.61623 |
| 21 | WANG K, CHEN T, XU S J. A comparison of algorithms for computing differential mean orbital elements in formation flying missions. Proc. of the AIAA Guidance, Navigation, and Control Conference, 2013. DOI: 10.2514/6.2013-4542. |
| 22 |
ZHONG W C, GURFIL P Mean orbital elements estimation for autonomous satellite guidance and orbit control. Journal of Guidance, Control, and Dynamics, 2013, 36 (6): 1624- 1641.
doi: 10.2514/1.60701 |
| 23 | LI L C, ZHANG J R, ZHAO S G, et al Autonomous onboard estimation of mean orbital elements for geostationary electric-propulsion satellites. Aerospace Science and Technology, 2019, 94, 105369. |
| 24 | ZHAI G, ZHAO H Y, WEN Q Q, et al Relative motion and thrust estimation of a non-cooperative maneuvering target with adaptive filter. Acta Astronautica, 2019, 162 (9): 98- 108. |
| 25 |
WANG Y D, SUN S M, LI L Adaptively robust unscented Kalman filter for tracking a maneuvering vehicle. Journal of Guidance, Control, and Dynamics, 2014, 37 (5): 1696- 1701.
doi: 10.2514/1.G000257 |
| 26 | JIANG Y Z, BAOYIN H X, MA P B Augmented unbiased minimum-variance input and state estimation for tracking a maneuvering satellite. Acta Astronautica, 2019, 163, 96- 107. |
| 27 | KO H C, SCHEERES D J Orbit determination across unknown maneuvers using the essential thrust-Fourier-coefficients. Acta Astronautica, 2016, 118 (1/2): 90- 95. |
| 28 | ZHAI G, BI X Z, ZHAO H Y, et al Non-cooperative maneuvering spacecraft tracking via a variable structure estimator. Aerospace Science and Technology, 2018, 79 (8): 352- 363. |
| 29 |
NASTASI K M, BLACK J T Adaptively tracking maneuvering spacecraft with a globally distributed, diversely populated surveillance network. Journal of Guidance, Control, and Dynamics, 2019, 42 (5): 1033- 1048.
doi: 10.2514/1.G003743 |
| 30 |
YU Y J, YUE C F, LI N, et al Onboard estimation of mean orbital elements extended to state jumping case. Journal of Guidance, Control, and Dynamics, 2022, 45 (11): 1996- 2012.
doi: 10.2514/1.G006468 |
| 31 | LIU L, TANG J S. Satellite orbit theory and application. Beijing: Publishing House of Electronics Industry, 2015. (in Chinese) |
| 32 |
SCHAUB H, ALFRIEND K Impulsive feedback control to establish specific mean orbit elements of spacecraft formations. Journal of Guidance, Control, and Dynamics, 2001, 24 (4): 739- 745.
doi: 10.2514/2.4774 |
| 33 | BATTIN R. An introduction to the mathematics and methods of astrodynamics. Reston: AIAA Education Series, 1999. |
| 34 | JULIER S. The spherical simplex unscented transformation. Proc. of the American Control Conference, 2003: 2430−2434. |
| [1] | Xu LYU, Ziyang MENG, Chunyu LI, Zhenyu CAI, Yi HUANG, Xiaoyong LI, Xingkai YU. A dual adaptive unscented Kalman filter algorithm for SINS-based integrated navigation system [J]. Journal of Systems Engineering and Electronics, 2024, 35(3): 732-740. |
| [2] | Guoqing SHI, Boyan ZHANG, Jiandong ZHANG, Qiming YANG, Xiaofeng HUANG, Jianyao QUE, Junwei PU, Xiutang GENG. Manipulator tracking technology based on FSRUKF [J]. Journal of Systems Engineering and Electronics, 2024, 35(2): 473-484. |
| [3] | Jianhong WANG, RAMIREZ-MENDOZA Ricardo A., Yang XU. Nonlinear direct data-driven control for UAV formation flight system [J]. Journal of Systems Engineering and Electronics, 2023, 34(6): 1409-1418. |
| [4] | Haichao ZHU, Weiyao LAN. Robust output regulation problem with prescribed performance for nonlinear strict feedback systems [J]. Journal of Systems Engineering and Electronics, 2023, 34(4): 1033-1041. |
| [5] | Minghong ZHU, Shu XIAO, Fei YU. Torque estimation for robotic joint with harmonic drive transmission based on system dynamic characteristics [J]. Journal of Systems Engineering and Electronics, 2022, 33(6): 1320-1331. |
| [6] | Keyi LI, Zhengkun GUO, Gongjian ZHOU. State estimation in range coordinate using range-only measurements [J]. Journal of Systems Engineering and Electronics, 2022, 33(3): 497-510. |
| [7] | Abdollah AZIZI, Mehdi FOROUZANFAR. Stabilizing controller design for nonlinear fractional order systems with time varying delays [J]. Journal of Systems Engineering and Electronics, 2021, 32(3): 681-689. |
| [8] | Muhammad WASIM, Ahsan ALI. Airship aerodynamic model estimation using unscented Kalman filter [J]. Journal of Systems Engineering and Electronics, 2020, 31(6): 1318-1329. |
| [9] | Hongwei WANG, Penglong FENG. Fuzzy modeling of multirate sampled nonlinear systems based on multi-model method [J]. Journal of Systems Engineering and Electronics, 2020, 31(4): 761-769. |
| [10] | Lixiong LIN, Qing WANG, Bingwei HE, Xiafu PENG. Evaluation of fault diagnosability for nonlinear uncertain systems with multiple faults occurring simultaneously [J]. Journal of Systems Engineering and Electronics, 2020, 31(3): 634-646. |
| [11] | Ligang GONG, Qing WANG, Chaoyang DONG. Switching disturbance rejection attitude control of near space vehicles with variable structure [J]. Journal of Systems Engineering and Electronics, 2019, 30(1): 167-179. |
| [12] | Jianguo GUO, Yuchao LIU, Jun ZHOU. Integral terminal sliding mode control for nonlinear systems [J]. Journal of Systems Engineering and Electronics, 2018, 29(3): 571-579. |
| [13] | Yongfang NIE, Tao ZHANG. Scaling parameters selection principle for the scaled unscented Kalman filter [J]. Journal of Systems Engineering and Electronics, 2018, 29(3): 601-610. |
| [14] | Guifang LI, CHEN Ye-Hwa. Controller design for stochastic nonlinear systems with matched conditions [J]. Journal of Systems Engineering and Electronics, 2018, 29(1): 160-165. |
| [15] | Bomin Huang, Lingmei Chen, and Weiyao Lan. Global robust output regulation for a class of affine singular nonlinear systems [J]. Systems Engineering and Electronics, 2017, 28(4): 745-. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||