
Journal of Systems Engineering and Electronics ›› 2024, Vol. 35 ›› Issue (3): 732-740.doi: 10.23919/JSEE.2024.000060
• CONTROL THEORY AND APPLICATION • Previous Articles
Xu LYU1( ), Ziyang MENG1(), Chunyu LI1(), Zhenyu CAI2,*(), Yi HUANG3(), Xiaoyong LI3(), Xingkai YU4()
), Ziyang MENG1(), Chunyu LI1(), Zhenyu CAI2,*(), Yi HUANG3(), Xiaoyong LI3(), Xingkai YU4()
Received:2023-12-14
Online:2024-06-18
Published:2024-06-19
Contact:
Zhenyu CAI
E-mail:lvlay@163.com;ziyangmeng@tsinghua.edu.cn;lcyfly1@163.com;592178236@qq.com;lx_bird@126.com;2016301610349@whu.edu.cn;yuxingkai2007@163.com
About author:Supported by:Xu LYU, Ziyang MENG, Chunyu LI, Zhenyu CAI, Yi HUANG, Xiaoyong LI, Xingkai YU. A dual adaptive unscented Kalman filter algorithm for SINS-based integrated navigation system[J]. Journal of Systems Engineering and Electronics, 2024, 35(3): 732-740.
Add to citation manager EndNote|Reference Manager|ProCite|BibTeX|RefWorks

Fig 1
Flow chart of Dual-AUKF"
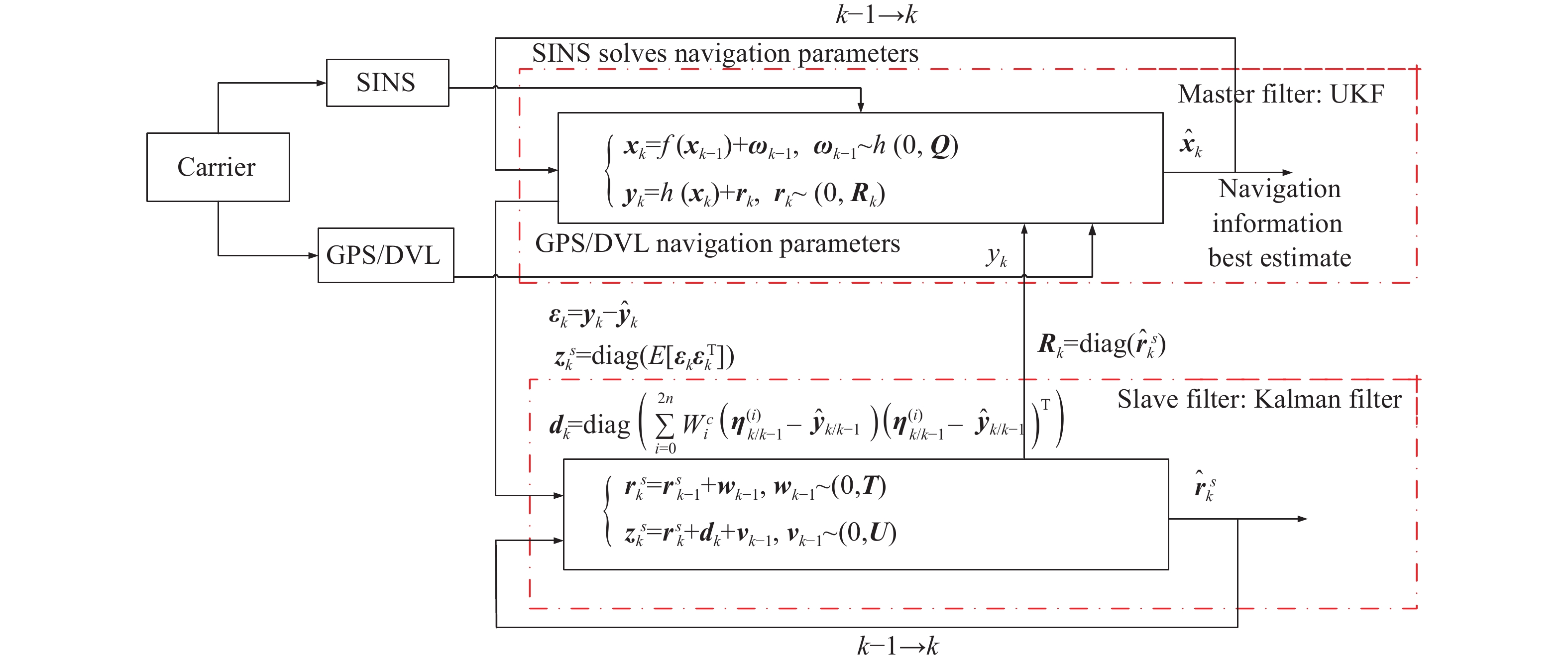

Fig 2
Trajectory of the car"

Table 1
Specifications of STIM300"
| Quantity | Gyro | Accelerometer |
| Dynamic range | ||
| Bias | ||
| Update rate |
Fig 3
Yaw estimate errors"

Fig 4
Latitude estimate errors"
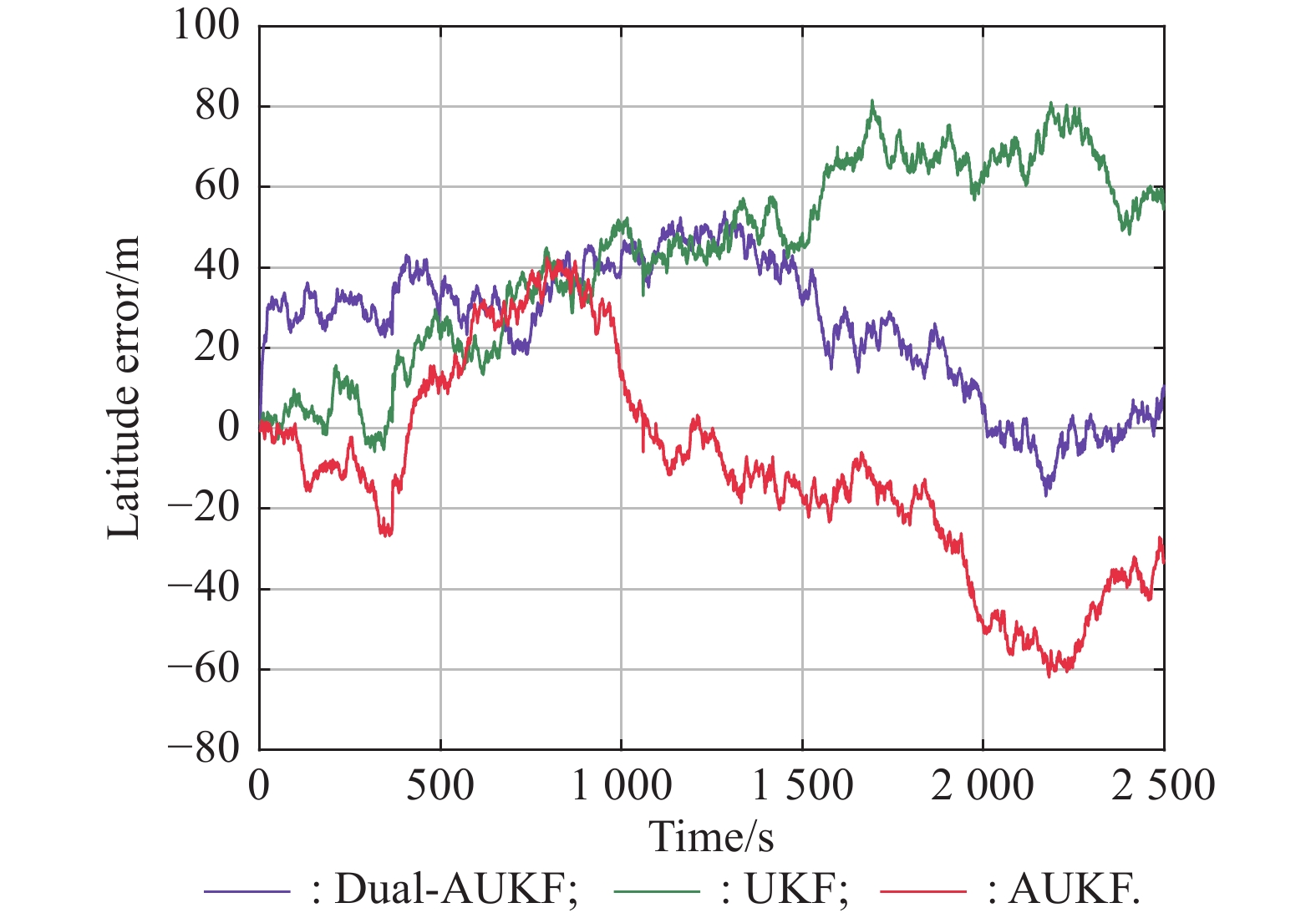
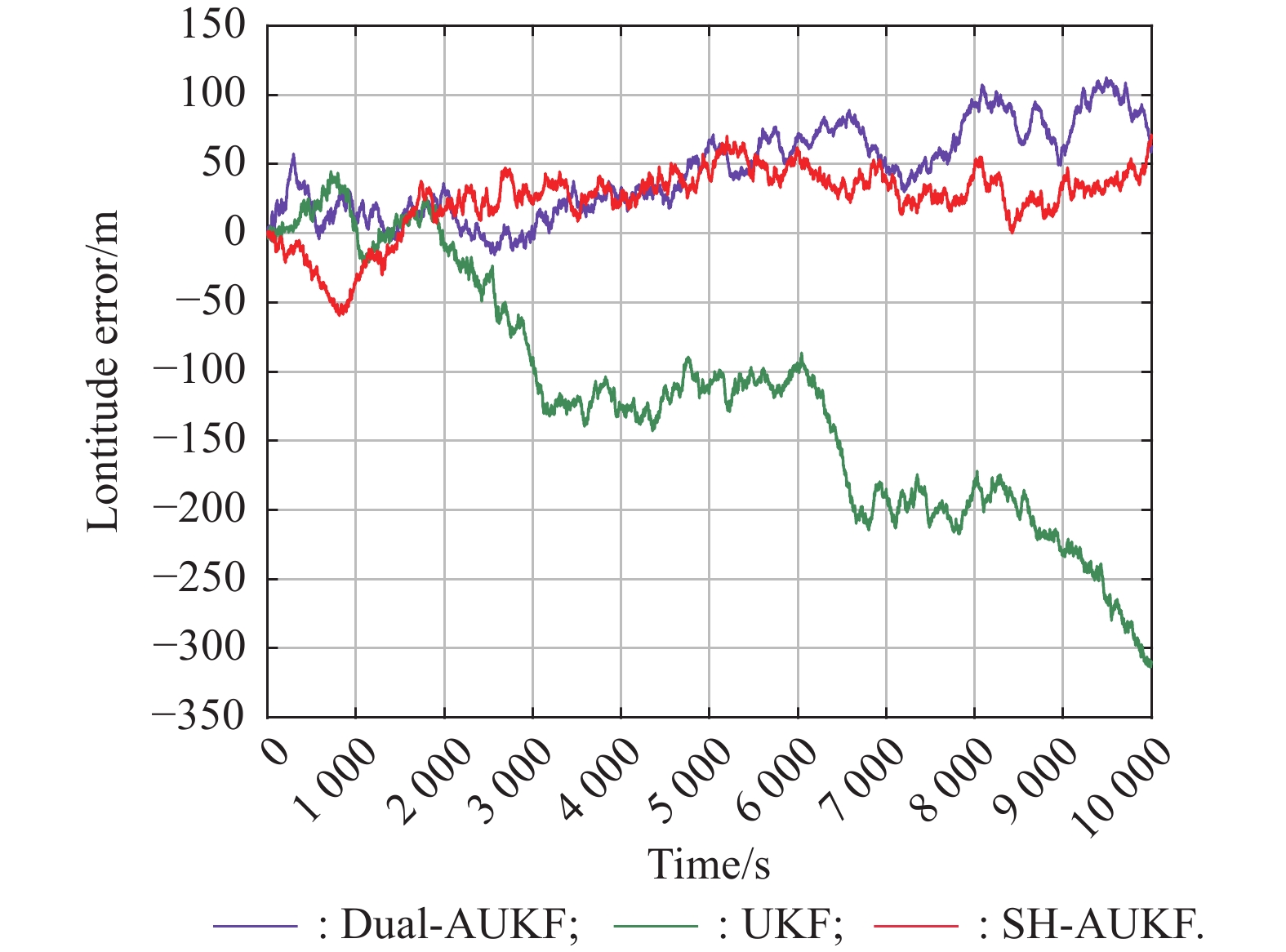
Fig 5
Longitude estimate errors"
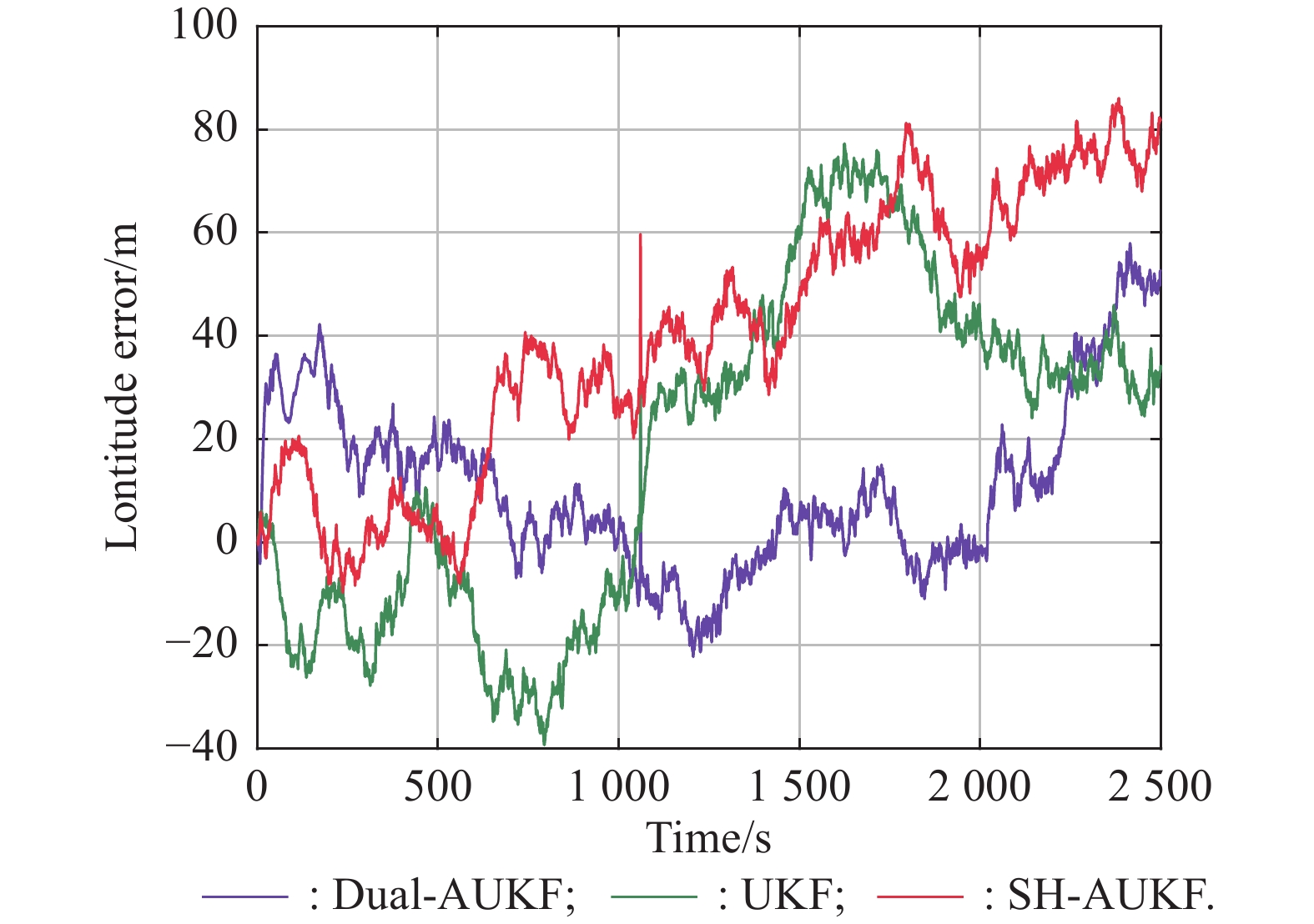
Table 2
Mean of state errors"
| Average estimation error | UKF | SH-AUKF | Dual-AUKF |
| Pitch error/(°) | 0.2835 | 0.2682 | 0.2596 |
| Roll error/(°) | 0.3940 | 0.3965 | 0.3762 |
| Yaw error/(°) | 1.2798 | 1.2079 | 1.0744 |
| East velocity error/(m·s−1) | 0.0207 | 0.0312 | 0.0034 |
| North velocity error/(m·s−1) | 0.0323 | 0.0078 | −0.0221 |
| Latitude error/m | 33.0567 | −5.6838 | −35.8853 |
| Latigude error/m | 37.8510 | 42.4647 | −5.3834 |
Table 3
Specifications of SINS"
| Quantity | Gyro | Accelerometer |
| Dynamic range | ||
| Bias | ||
| Update rate |
Table 4
Specifications of DVL"
| Quantity | DVL |
| Speed range/kn | |
| Bias/(cm/s) | |
| Update rate/Hz | |
| Depth of the botton track/m |

Fig 6
Trajectory of shipboard test"

Fig 7
Pitch estimate errors"
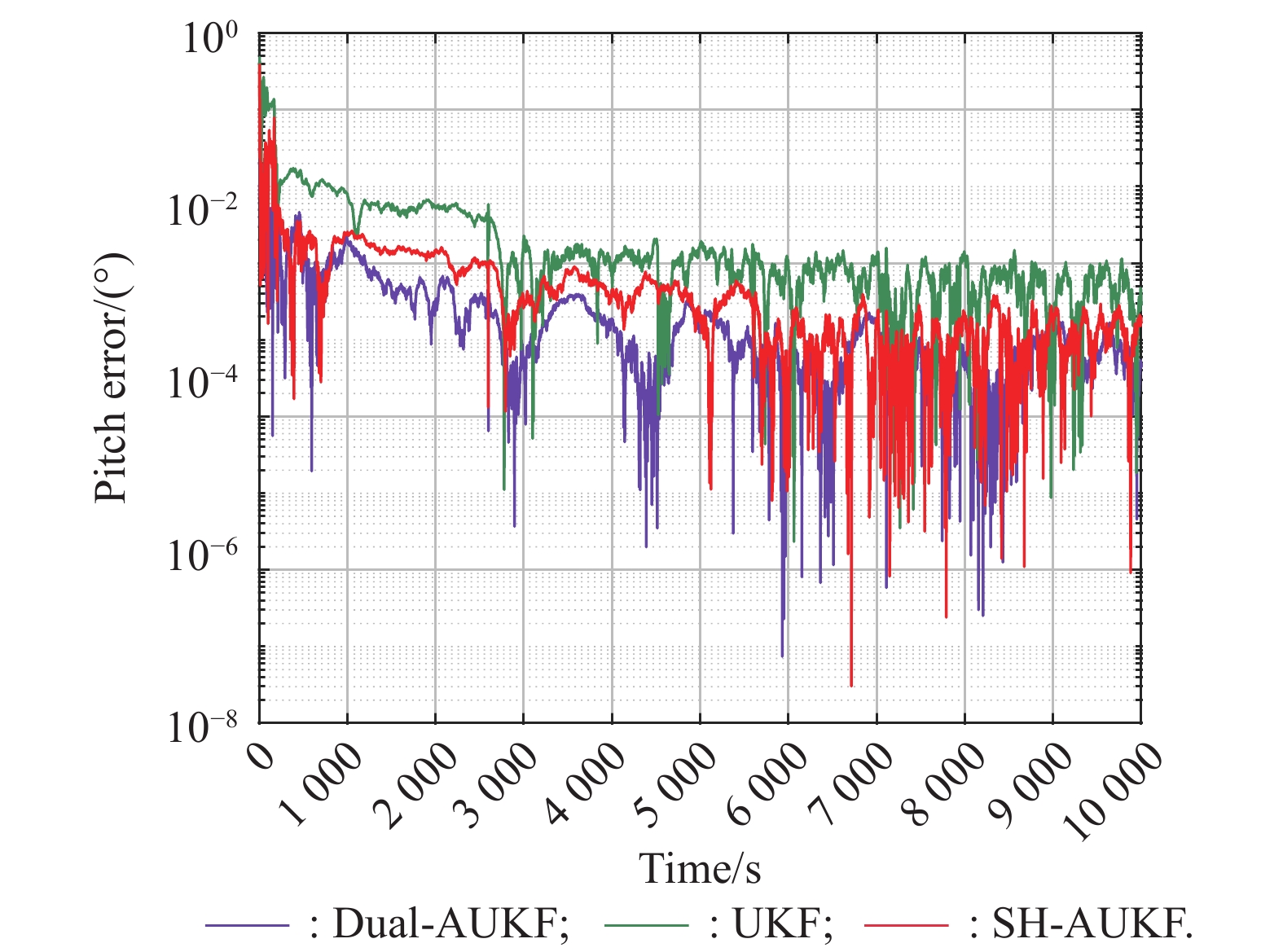
Fig 8
Roll estimate errors"
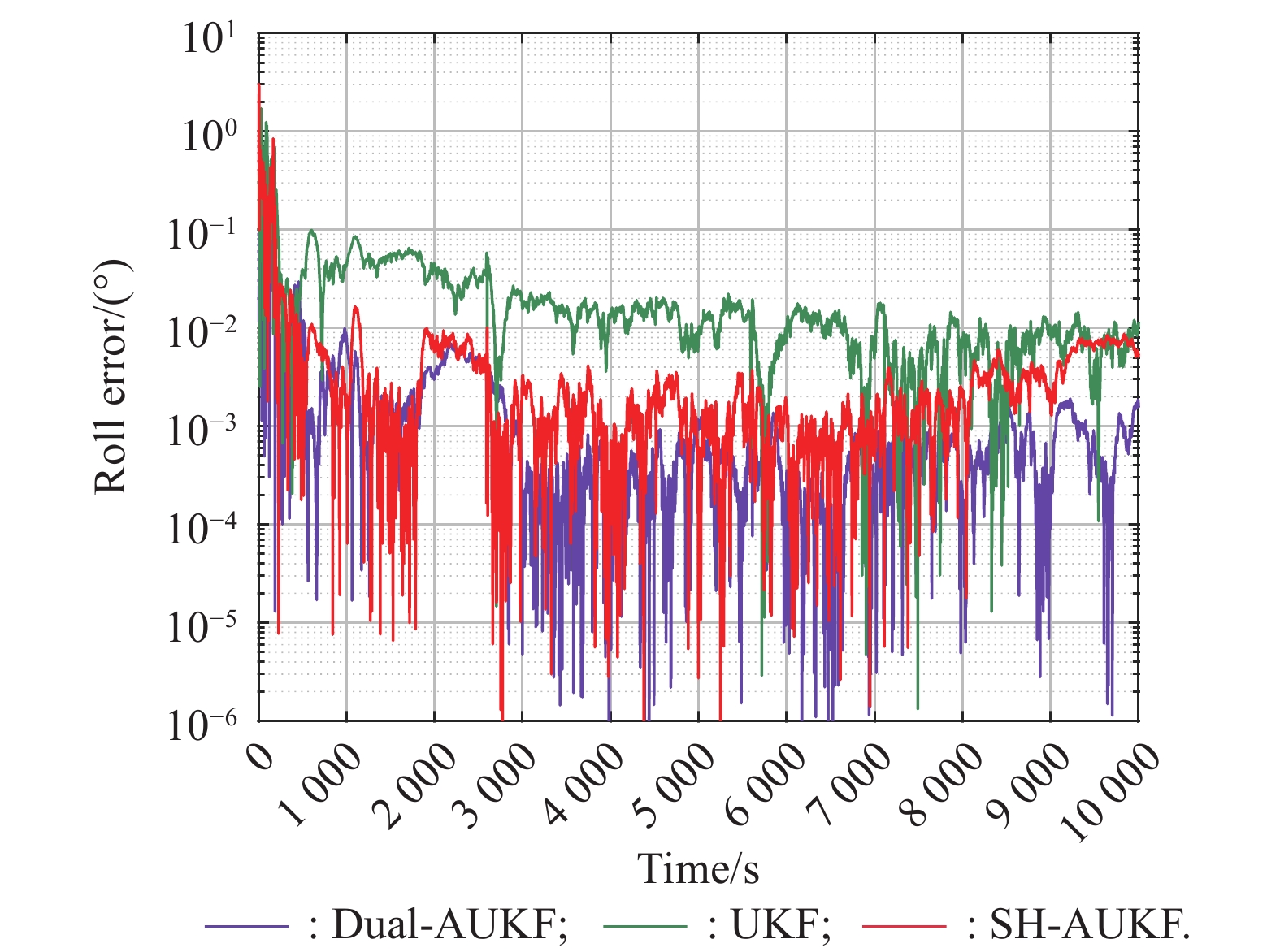
Fig 9
Yaw estimate errors"
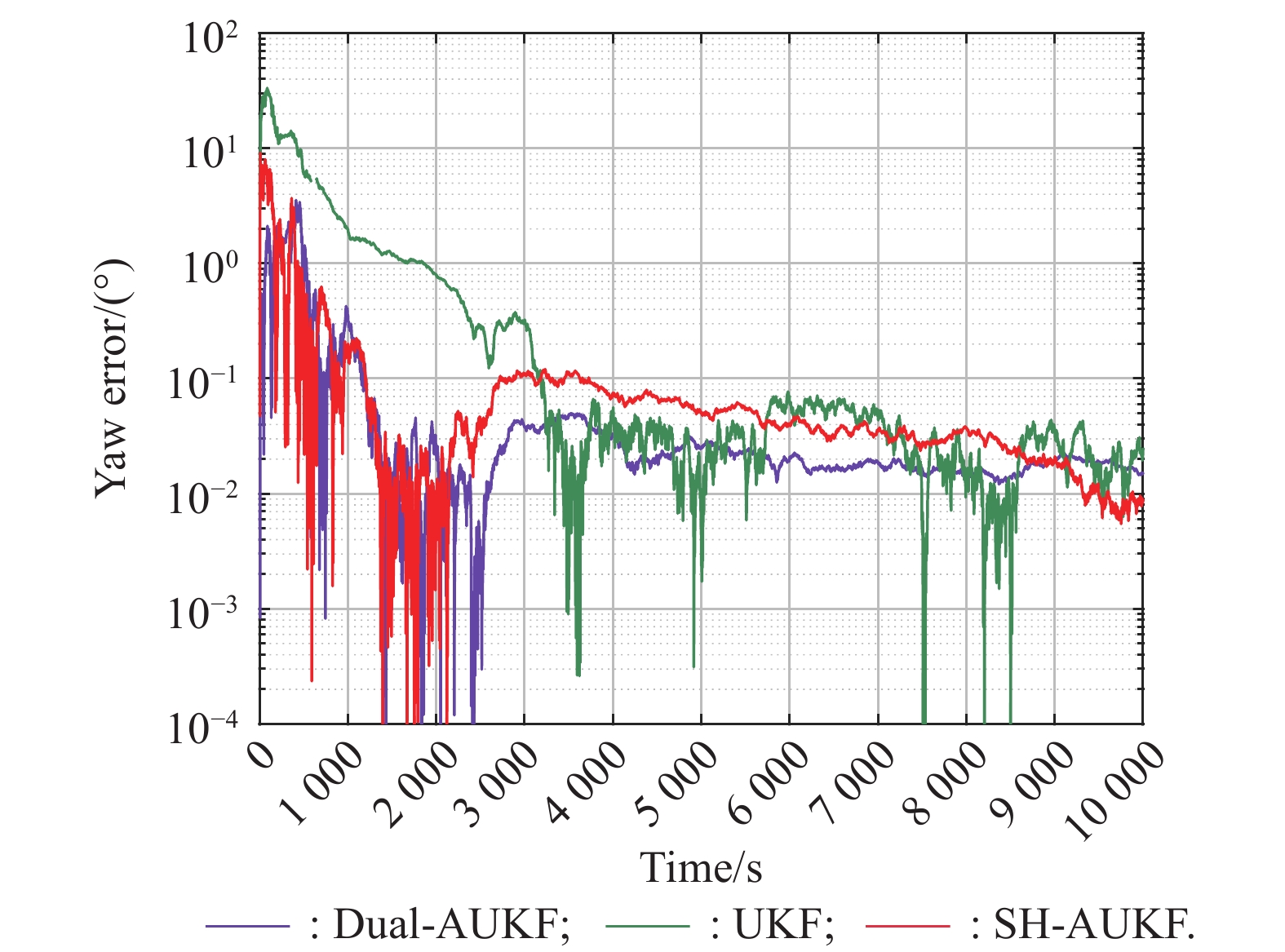
Fig 10
Latitude estimate errors"
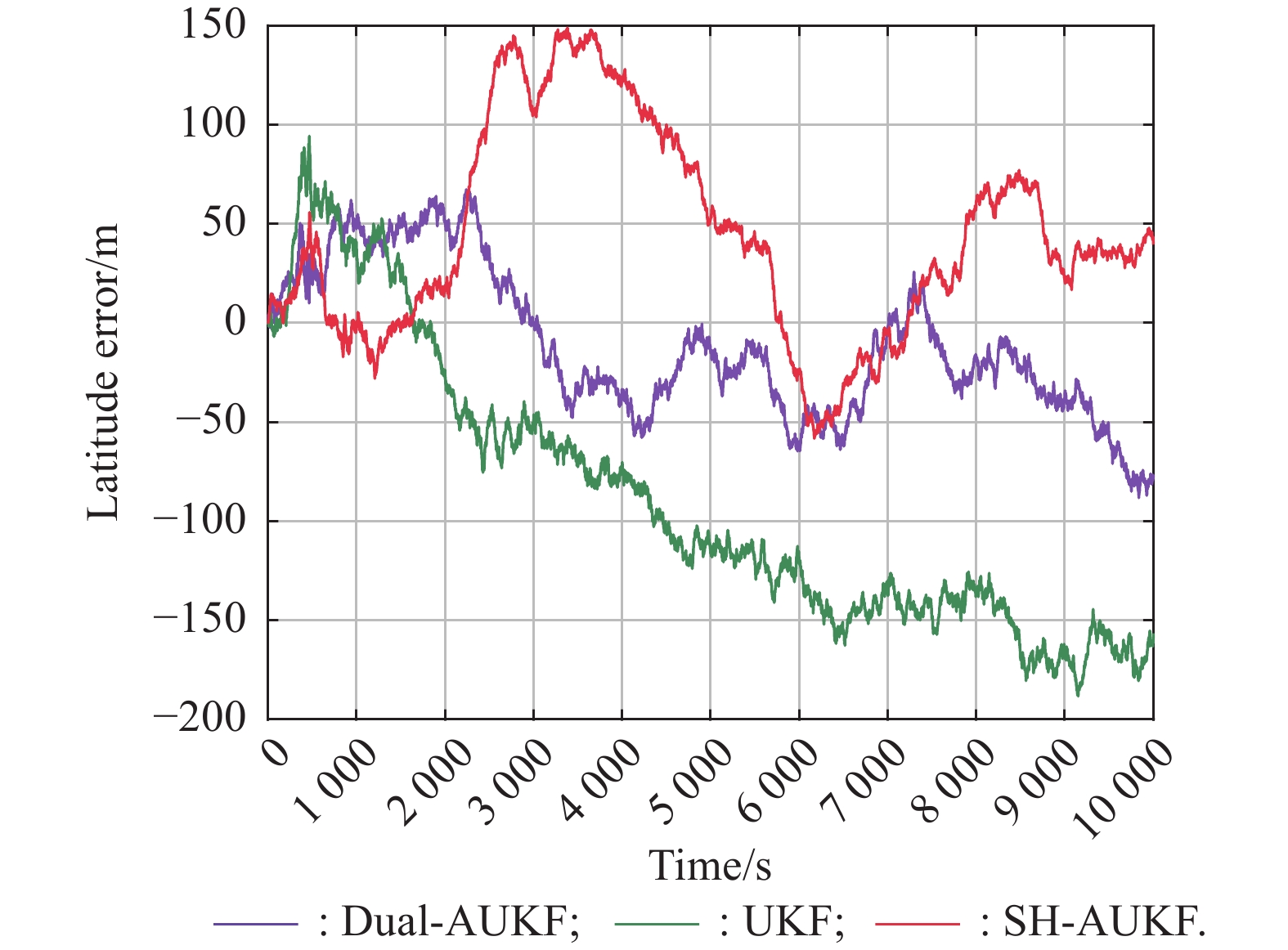
Fig 11
Longitude estimate errors"
| 1 |
LYU X, HU B Q, DAI Y B, et al Gaussian process regression-based quaternion unscented Kalman robust filter for integrated SINS/GNSS. Journal of Systems Engineering and Electronics, 2022, 33 (5): 1079- 1088.
doi: 10.23919/JSEE.2022.000105 |
| 2 | LI K L, LU X, LI W K Nonlinear error model based on quaternion for the INS: analysis and comparison. IEEE Trans. on Vehicular Technology, 2020, 70 (1): 263- 272. |
| 3 |
CHANG L, NIU X J, LIU T Y GNSS/IMU/ODO/LiDAR-SLAM integrated navigation system using IMU/ODO pre-integration. Sensors, 2020, 20 (17): 4702.
doi: 10.3390/s20174702 |
| 4 | LYU X, HU B Q, WANG Z, et al A SINS/GNSS/VDM integrated navigation fault-tolerant mechanism based on adaptive information sharing factor. IEEE Trans. on Instrumentation and Measurement, 2022, 71, 9506913. |
| 5 | WANG D, XU X S, YAO Y Q, et al A novel SINS/DVL tightly integrated navigation method for complex environment. IEEE Trans. on Instrumentation and Measurement, 2019, 69 (7): 5183- 5196. |
| 6 |
FENG K Q, LI J, ZHANG X, et al An improved strong tracking cubature Kalman filter for GPS/INS integrated navigation systems. Sensors, 2018, 18 (6): 1919.
doi: 10.3390/s18061919 |
| 7 |
LI K L, HU B Q, CHANG L B, et al Comparison of direct navigation mode and indirect navigation mode for integrated SINS/GPS. Transactions of the Institute of Measurement and Control, 2016, 38 (1): 3- 13.
doi: 10.1177/0142331214568236 |
| 8 | CHANG L B, LI J S, CHENG S Y Initial alignment by attitude estimation for strapdown inertial navigation systems. IEEE Trans. on Instrumentation and Measurement, 2014, 64 (3): 784- 794. |
| 9 | KARAMAT T B, LINS R G, GIVIGI S N, et al, Novel EKF-based vision/inertial system integration for improved navigation. IEEE Trans. on Instrumentation and Measurement, 2018, 67(1): 116−125. |
| 10 |
ZHU T G, LI A, LI K L, et al The quaternion based error model based on SE(3) of the INS. IEEE Sensors Journal, 2022, 22 (13): 13067- 13077.
doi: 10.1109/JSEN.2022.3174596 |
| 11 |
LI K L, CHANG L B, HU B Q A variational Bayesian-based unscented Kalman filter with both adaptivity and robustness. IEEE Sensors Journal, 2016, 16 (18): 6966- 6976.
doi: 10.1109/JSEN.2016.2591260 |
| 12 |
LYU X, HU B Q, LI K L, et al An adaptive and robust UKF approach based on gaussian process regression-aided variational bayesian. IEEE Sensors Journal, 2021, 21 (7): 9500- 9514.
doi: 10.1109/JSEN.2021.3055846 |
| 13 |
GAO D Y, HU B Q, CHANG L B, et al An aided navigation method based on strapdown gravity gradiometer. Sensors, 2021, 21 (3): 829.
doi: 10.1109/JSEN.2020.3045950 |
| 14 | NARSIMHAPPA M, MAHINDRAKAR A D, et al. An improved Sage Husa adaptive robust Kalman filter for de-noising the MEMS IMU drift signal. Proc. of the IEEE Indian Control Conference, 2018: 229−234. |
| 15 |
MEHRA R On the identification of variances and adaptive Kalman filtering. IEEE Trans. on Automatic Control, 1970, 15 (2): 175- 184.
doi: 10.1109/TAC.1970.1099422 |
| 16 | SUN J R, TAO L, NIU Z, et al An improved adaptive unscented kalman filter with application in the deeply integrated BDS/INS navigation system. IEEE Access, 2020, 8, 95321- 95332. |
| 17 | XU Y L, LIU W Q, DING X Q, et al. USBL positioning system based adaptive kalman filter in AUV. Proc. of the OCEANS-MTS/IEEE Kobe Techno-Oceans Conference, 2018: 28−31. |
| 18 |
HOU L H, XU X S, YAO Y Q, et al Improved exponential weighted moving average based measurement noise estimation for strapdown inertial navigation system/ Doppler velocity log integrated system. The Journal of Navigation, 2021, 74 (2): 467- 487.
doi: 10.1017/S0373463320000570 |
| 19 |
MENG Y, GAO S S, ZHONG Y M, et al Covariance matching based adaptive unscented Kalman filter for direct filtering in INS/GNSS integration. Acta Astronautica, 2016, 120 (3): 171- 181.
doi: 10.1016/j.actaastro.2015.12.014 |
| 20 |
ASROZA R, ALESSANDRI A, CONTE J P A dual adaptive filtering approach for nonlinear finite element model updating accounting for modeling uncertainty. Mechanical Systems and Signal Processing, 2019, 115, 782- 800.
doi: 10.1016/j.ymssp.2018.06.014 |
| 21 |
SONG M, ASTROZA R, EBRAHIMIAN H, et al Adaptive Kalman filters for nonlinear finite element model updating. Mechanical Systems and Signal Processing, 2020, 143, 106837.
doi: 10.1016/j.ymssp.2020.106837 |
| 22 |
GUO F, HU G D, XIANG S, et al A multi-scale parameter adaptive method for state of charge and parameter estimation of lithium-ion batteries using dual Kalman filters. Energy, 2019, 178 (7): 79- 88.
doi: 10.1016/j.energy.2019.04.126 |
| 23 |
LI J B, YE M, GAO K P, et al Joint estimation of state of charge and state of health for lithium-ion battery based on dual adaptive extended Kalman filter. International Journal of Energy Research, 2021, 45 (9): 13307- 13322.
doi: 10.1002/er.6658 |
| 24 |
JULIER S J, UHLMAN J K Unscented filtering and nonlinear estimation. Proceedings of the IEEE, 2004, 92 (3): 401- 422.
doi: 10.1109/JPROC.2003.823141 |
| [1] | Yuqi YUAN, Di ZHOU, Junlong LI, Chaofei LOU. Time-varying parameters estimation with adaptive neural network EKF for missile-dual control system [J]. Journal of Systems Engineering and Electronics, 2024, 35(2): 451-462. |
| [2] | Guoqing SHI, Boyan ZHANG, Jiandong ZHANG, Qiming YANG, Xiaofeng HUANG, Jianyao QUE, Junwei PU, Xiutang GENG. Manipulator tracking technology based on FSRUKF [J]. Journal of Systems Engineering and Electronics, 2024, 35(2): 473-484. |
| [3] | Muhammad WASIM, Ahsan ALI, Mohammad Ahmad CHOUDHRY, Inam Ul Hasan SHAIKH, Faisal SALEEM. Robust design of sliding mode control for airship trajectory tracking with uncertainty and disturbance estimation [J]. Journal of Systems Engineering and Electronics, 2024, 35(1): 242-258. |
| [4] | Shuisheng ZHOU, Wenmeng ZHANG, Li CHEN, Mingliang XU. Robust least squares projection twin SVM and its sparse solution [J]. Journal of Systems Engineering and Electronics, 2023, 34(4): 827-838. |
| [5] | Haichao ZHU, Weiyao LAN. Robust output regulation problem with prescribed performance for nonlinear strict feedback systems [J]. Journal of Systems Engineering and Electronics, 2023, 34(4): 1033-1041. |
| [6] | Yamin FAN, Duanjin ZHANG. Robust fault detection for delta operator switched fuzzy systems with bilateral packet losses [J]. Journal of Systems Engineering and Electronics, 2023, 34(1): 214-223. |
| [7] | Hailong ZHANG, Gong ZHANG, Biao XUE, Jiawen YUAN. Mainlobe jamming suppression via improved BSS method for rotated array radar [J]. Journal of Systems Engineering and Electronics, 2022, 33(6): 1151-1158. |
| [8] | Minghong ZHU, Shu XIAO, Fei YU. Torque estimation for robotic joint with harmonic drive transmission based on system dynamic characteristics [J]. Journal of Systems Engineering and Electronics, 2022, 33(6): 1320-1331. |
| [9] | Xu LYU, Baiqing HU, Yongbin DAI, Mingfang SUN, Yi LIU, Duanyang GAO. Gaussian process regression-based quaternion unscented Kalman robust filter for integrated SINS/GNSS [J]. Journal of Systems Engineering and Electronics, 2022, 33(5): 1079-1088. |
| [10] | Bing WANG, Pengfei ZHANG, Yufeng HE, Xiaozhi WANG, Xianxia ZHANG. Scenario-oriented hybrid particle swarm optimization algorithm for robust economic dispatch of power system with wind power [J]. Journal of Systems Engineering and Electronics, 2022, 33(5): 1143-1150. |
| [11] | Yangjun GAO, Guangyun LI, Zhiwei LYU, Lundong ZHANG, Zhongpan LI. Improved adaptively robust estimation algorithm for GNSS spoofer considering continuous observation error [J]. Journal of Systems Engineering and Electronics, 2022, 33(5): 1237-1248. |
| [12] | Keyi LI, Zhengkun GUO, Gongjian ZHOU. State estimation in range coordinate using range-only measurements [J]. Journal of Systems Engineering and Electronics, 2022, 33(3): 497-510. |
| [13] | Shenghua WANG, Yunhe CAO, Yutao LIU. A method of Robust low-angle target height and compound reflection coefficient joint estimation [J]. Journal of Systems Engineering and Electronics, 2022, 33(2): 322-329. |
| [14] | Mingyi YOU, Annan LU. A robust TDOA based solution for source location using mixed Huber loss [J]. Journal of Systems Engineering and Electronics, 2021, 32(6): 1375-1380. |
| [15] | Zining WANG, Min LIN, Xiaogang TANG, Kefeng GUO, Shuo HUANG, Ming CHENG. Multi-objective robust secure beamforming for cognitive satellite and UAV networks [J]. Journal of Systems Engineering and Electronics, 2021, 32(4): 789-798. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||