
Journal of Systems Engineering and Electronics ›› 2025, Vol. 36 ›› Issue (1): 155-175.doi: 10.23919/JSEE.2025.000012
• SYSTEMS ENGINEERING • Previous Articles
Yuelong LUO1( ), Xiuqiang JIANG1,2,3,*(), Suchuan ZHONG1(), Yuandong JI1,2,3()
), Xiuqiang JIANG1,2,3,*(), Suchuan ZHONG1(), Yuandong JI1,2,3()
Received:2023-04-06
Online:2025-02-18
Published:2025-03-18
Contact:
Xiuqiang JIANG
E-mail:yuelong@stu.scu.edu.cn;jiangxiuqiang@scu.edu.cn;sczhong@scu.edu.cn;jyd1127@scu.edu.cn
About author:Supported by:Yuelong LUO, Xiuqiang JIANG, Suchuan ZHONG, Yuandong JI. Air-to-ground reconnaissance-attack task allocation for heterogeneous UAV swarm[J]. Journal of Systems Engineering and Electronics, 2025, 36(1): 155-175.
Add to citation manager EndNote|Reference Manager|ProCite|BibTeX|RefWorks
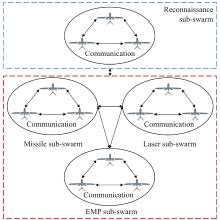
Fig 1
Heterogeneous UAV swarm structure"
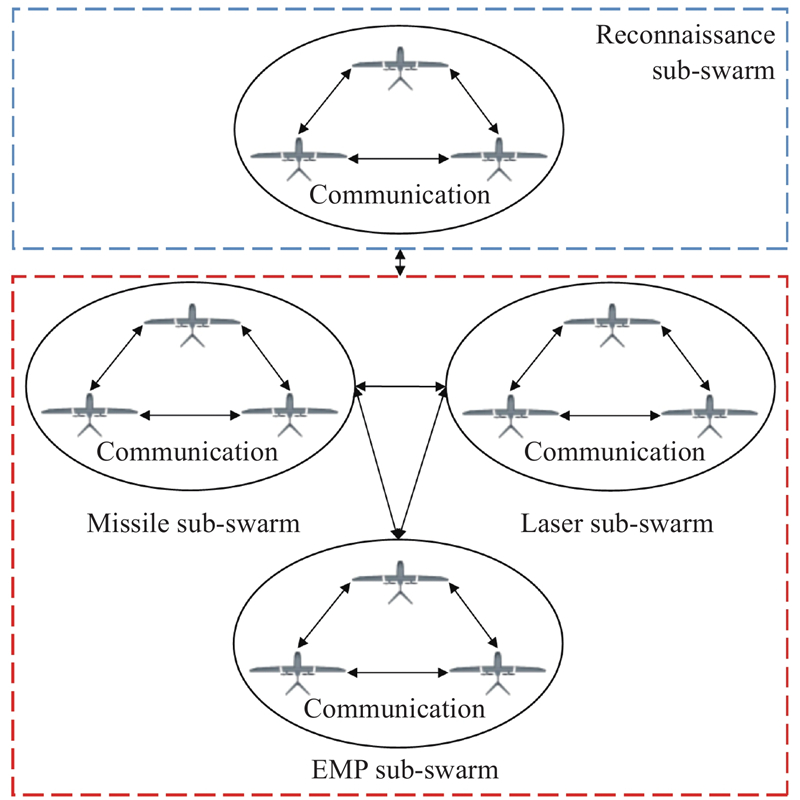
Fig 2
Schematic diagram of task cooperative allocation for the initial target unknown scenario"
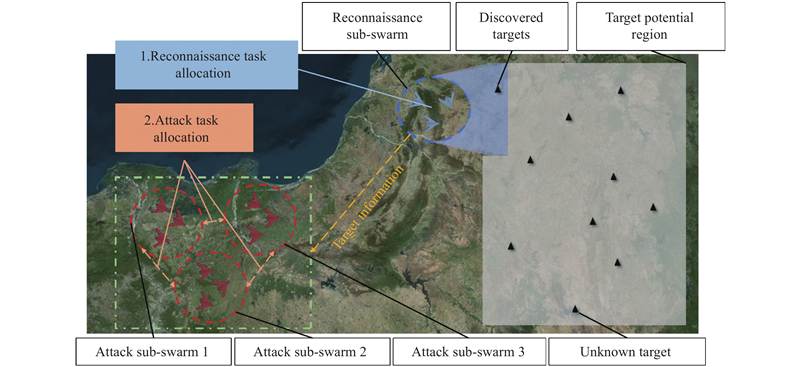
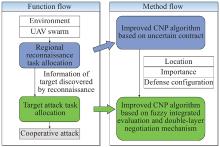
Fig 3
Overall flowchart of collaborative task allocation in incomplete information environments"
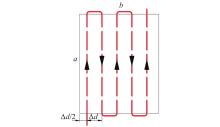
Fig 4
Lawnmower search pattern"
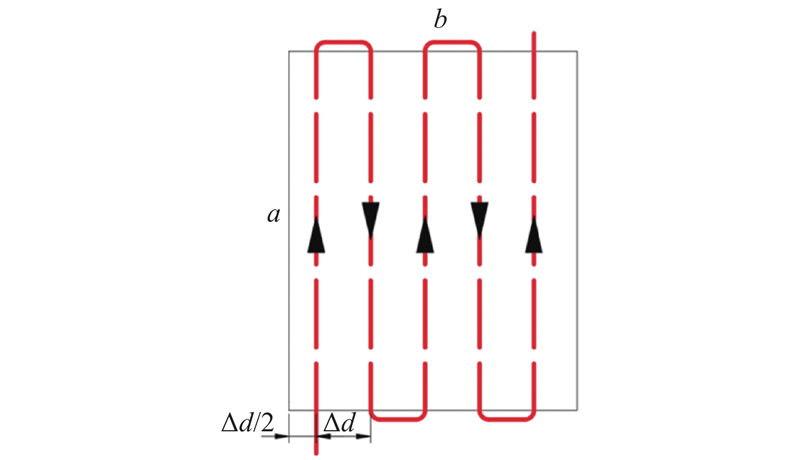
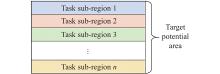
Fig 5
Reconnaissance region division"
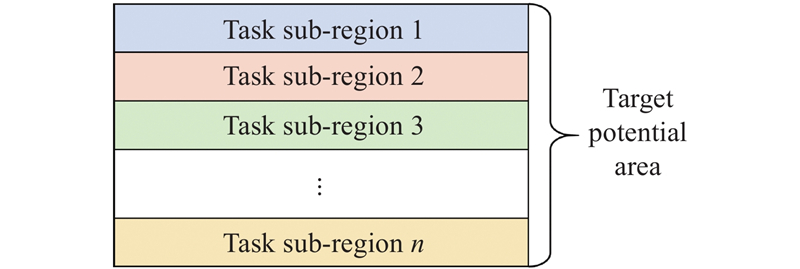

Fig 6
Diagram of the uncertain contract based improved CNP algorithm"
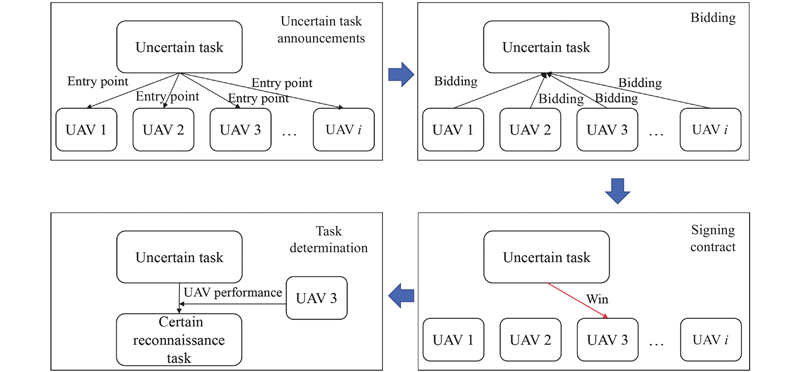
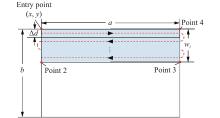
Fig 7
Schematic diagram of the ith reconnaissance sub-region"
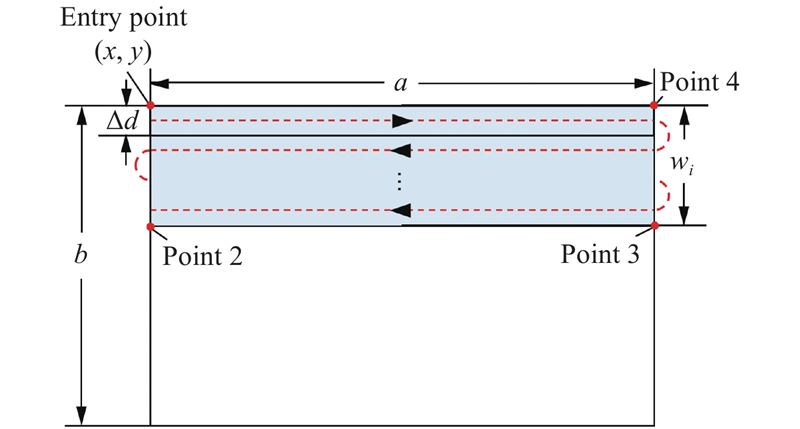
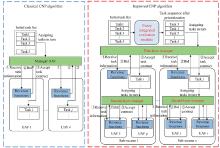
Fig 8
Comparison of classical CNP algorithm and improved CNP algorithm"
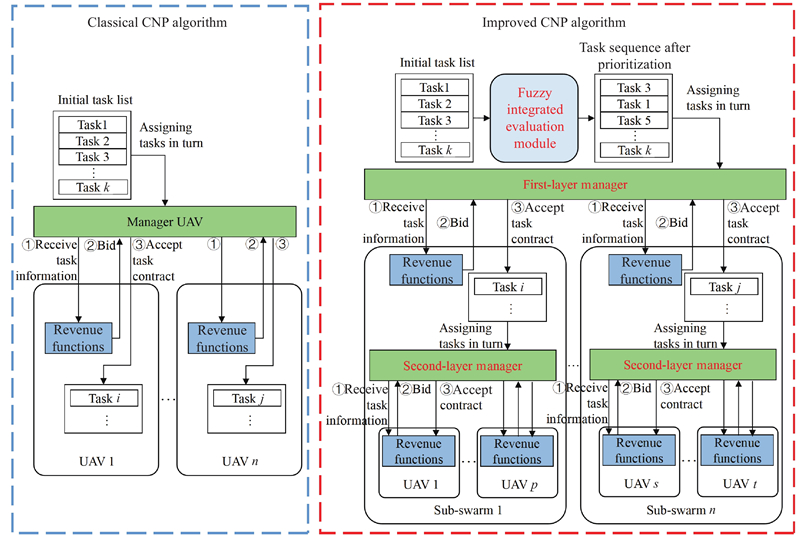
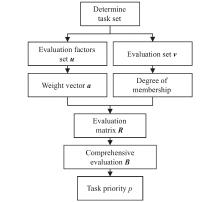
Fig 9
Flow of task assessment based on the fuzzy integrated evaluation"
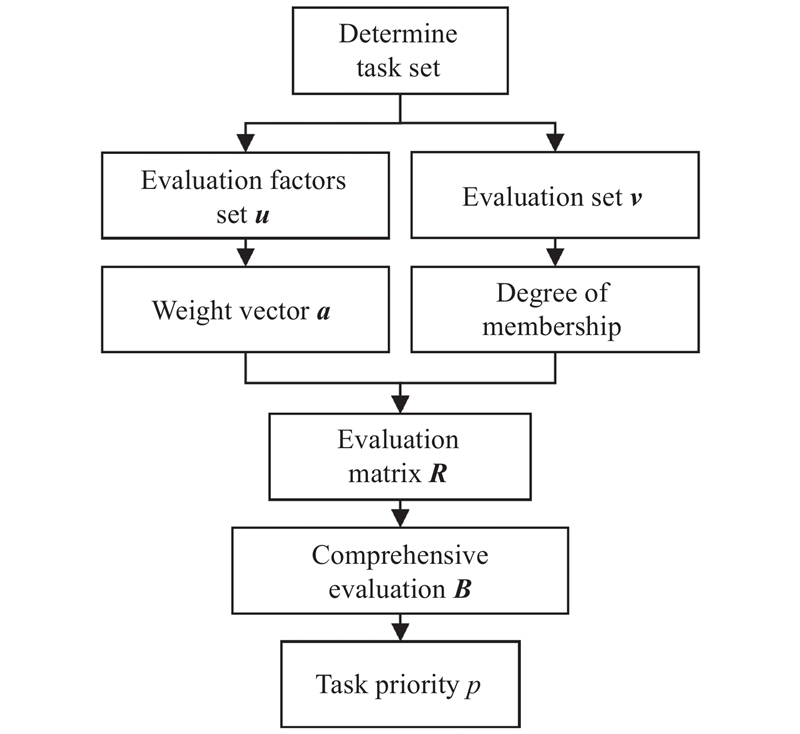
Table 1
Four evaluation sets"
| Evaluation set | Definition |
| Urgency evaluation set | |
| Importance evaluation set | |
| Execution time evaluation set | |
| Complexity evaluation set |

Fig 10
Membership function of four evaluation sets"
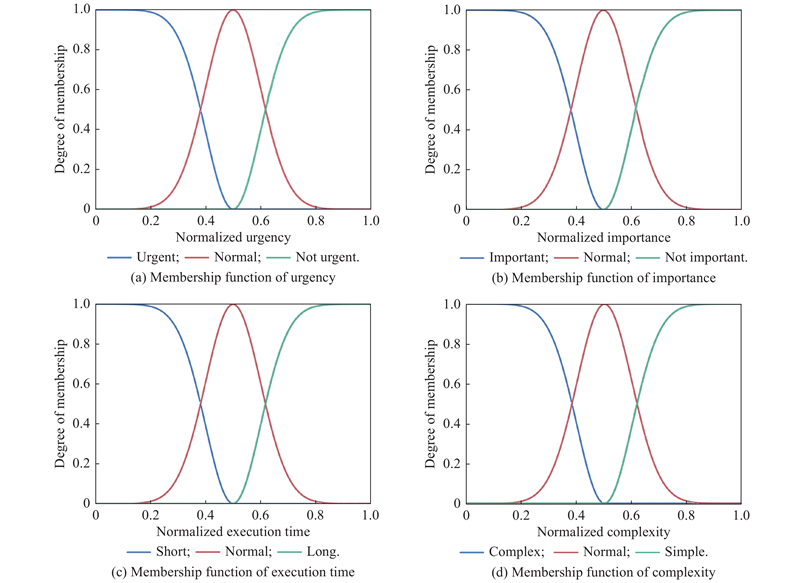

Fig 11
Diagram of dynamic task reallocation"
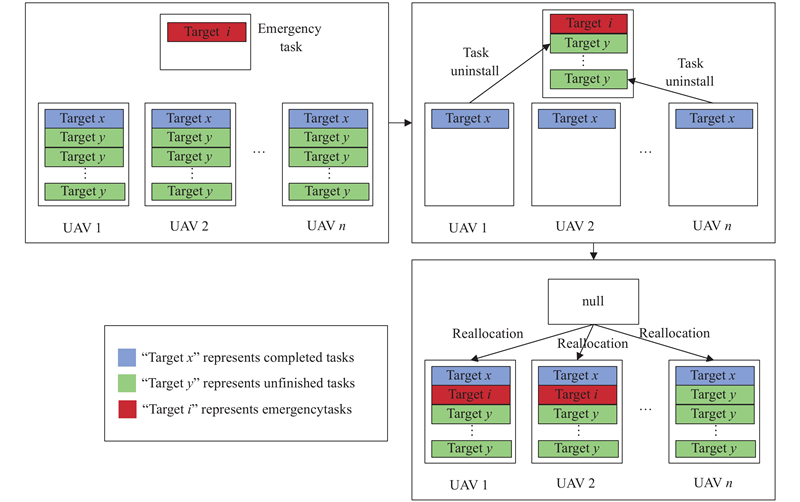
Table 2
Target parameter setting"
| Target | Location/km | Missile defense capability | Laser defense capability | EMP defense capability | Attack revenue | Latest time/h | Number of UAVs required |
| Target 1 | (185,153) | 65 | 22 | 81 | 10 | 1.2 | 5 |
| Target 2 | (293,151) | 43 | 20 | 57 | 20 | 2.7 | 4 |
| Target 3 | (289,209) | 95 | 76 | 29 | 30 | 2 | 5 |
| Target 4 | (260,189) | 97 | 18 | 25 | 40 | 2.8 | 4 |
| Target 5 | (86,166) | 31 | 77 | 73 | 50 | 1 | 6 |
| Target 6 | (288,188) | 73 | 47 | 24 | 60 | 2.6 | 5 |
| Target 7 | (28,151) | 33 | 52 | 48 | 70 | 2.8 | 6 |
| Target 8 | (194,160) | 92 | 68 | 42 | 80 | 1.2 | 7 |
| Target 9 | (18,295) | 60 | 57 | 41 | 90 | 1.9 | 7 |
| Target 10 | (226,272) | 42 | 70 | 88 | 100 | 2.7 | 7 |
Table 3
Detection alert area parameter setting"
| Area | Center location/km | Radius/km |
| Area 1 | (165, 39) | 18 |
| Area 2 | (270, 60) | 15 |
| Area 3 | (240, 210) | 45 |
| Area 4 | (105, 105) | 21 |
| Area 5 | (186, 171) | 42 |
| Area 6 | (69, 195) | 50 |
Fig 12
Simulation map setting"
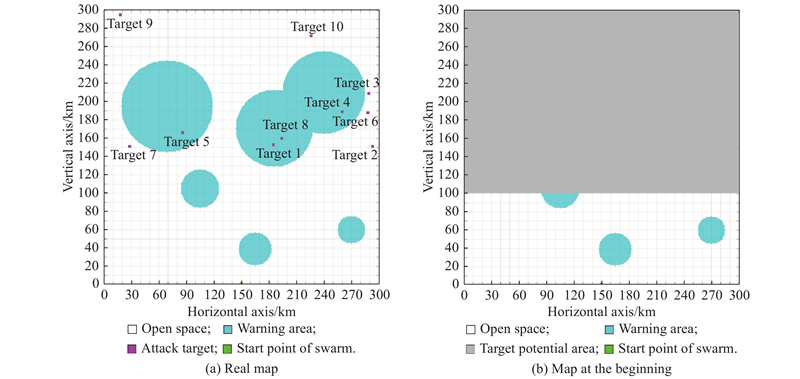
Table 4
Parameter of the reconnaissance sub-swarm"
| ID | Detection width/km | Flight velocity/(km/h) | Current location/km | Current task execution time/h |
| UAV_r 1 | 20 | (150,1) | 0 | |
| UAV_r 2 | 20 | (150,1) | 0 | |
| UAV_r 3 | 20 | (150,1) | 0 | |
| UAV_r 4 | 20 | (150,1) | 0 | |
| UAV_r 5 | 20 | (150,1) | 0 |
Table 5
Parameters of three attack UAV sub-swarms"
| ID | Sub-swarm | Task volume | Survival capability (0-100) | Flight velocity (km/h) | Attack capability (0-100) |
| UAV 1 | Missile | 3 | 28 | 84 | |
| UAV 2 | Missile | 3 | 85 | 89 | |
| UAV 3 | Missile | 3 | 76 | 100 | |
| UAV 4 | Missile | 3 | 2 | 77 | |
| UAV 5 | Missile | 3 | 77 | 91 | |
| UAV 6 | Missile | 3 | 44 | 80 | |
| UAV 7 | Missile | 3 | 61 | 91 | |
| UAV 8 | Missile | 3 | 14 | 96 | |
| UAV 9 | Missile | 3 | 55 | 80 | |
| UAV 10 | Missile | 3 | 17 | 85 | |
| UAV 11 | Laser | 3 | 67 | 77 | |
| UAV 12 | Laser | 3 | 7 | 98 | |
| UAV 13 | Laser | 3 | 3 | 79 | |
| UAV 14 | Laser | 3 | 73 | 88 | |
| UAV 15 | Laser | 3 | 3 | 99 | |
| UAV 16 | Laser | 3 | 12 | 94 | |
| UAV 17 | Laser | 3 | 57 | 82 | |
| UAV 18 | Laser | 3 | 5 | 91 | |
| UAV 19 | Laser | 3 | 4 | 83 | |
| UAV 20 | Laser | 3 | 73 | 87 | |
| UAV 21 | EMP | 3 | 99 | 80 | |
| UAV 22 | EMP | 3 | 70 | 88 | |
| UAV 23 | EMP | 3 | 70 | 95 | |
| UAV 24 | EMP | 3 | 29 | 96 | |
| UAV 25 | EMP | 3 | 80 | 76 | |
| UAV 26 | EMP | 3 | 56 | 91 | |
| UAV 27 | EMP | 3 | 45 | 91 | |
| UAV 28 | EMP | 3 | 89 | 98 | |
| UAV 29 | EMP | 3 | 82 | 85 | |
| UAV 30 | EMP | 3 | 58 | 81 |
Fig 13
Reconnaissance task allocation results"
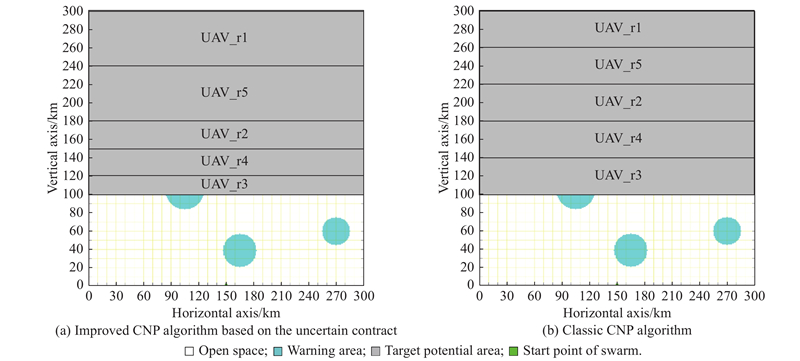
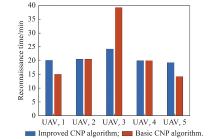
Fig 14
Comparison diagram of reconnaissance time of two algorithms"
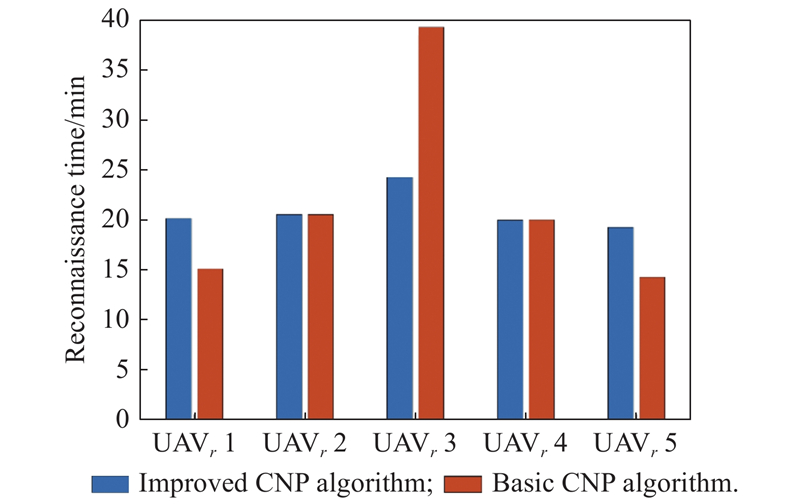
Fig 15
Comparison chart of reconnaissance time metrics of the two algorithms"
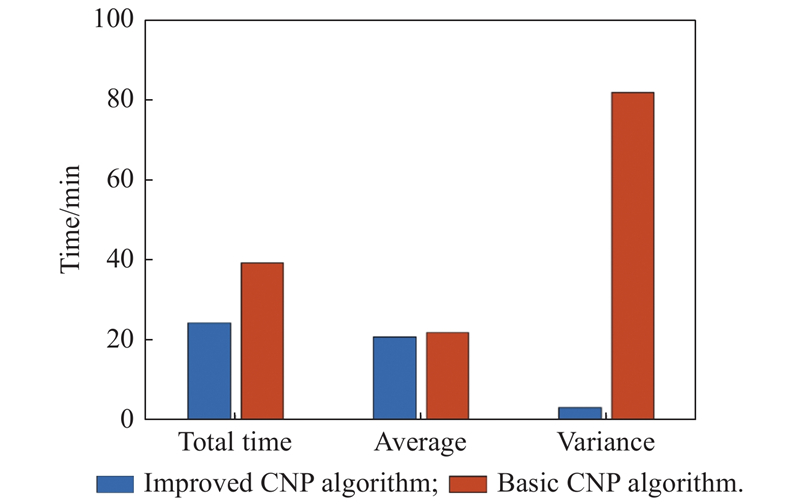
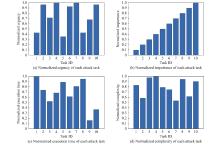
Fig 16
Four normalized evaluation factors of each attack task"
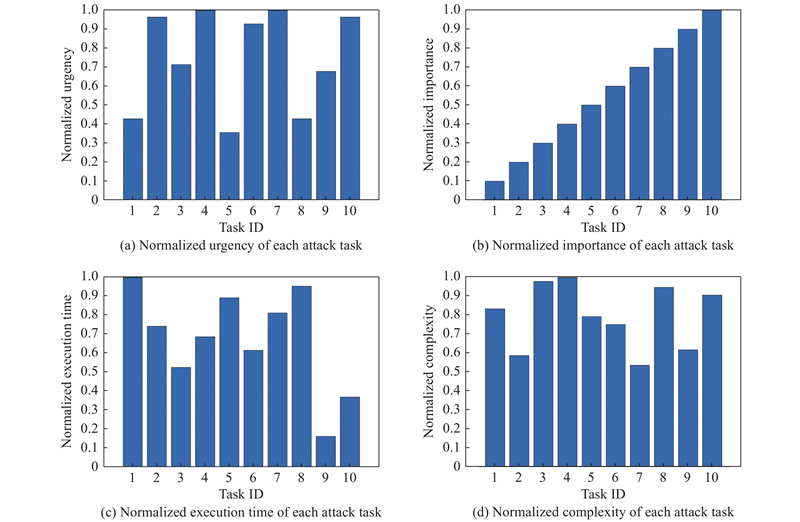
Table 6
Task priority assessment results"
| Task number | Task priority |
| No. 7 | 95 |
| No. 8 | 92 |
| No. 6 | 87 |
| No. 4 | 84 |
| No. 10 | 79 |
| No. 5 | 79 |
| No. 2 | 77 |
| No. 1 | 72 |
| No. 9 | 70 |
| No. 3 | 68 |
Table 7
Results of the first-layer negotiation"
| Attack UAV sub-swarm | Number of tasks |
| Missile sub-swarm | 7, 10, 5 |
| Laser sub-swarm | 4, 2, 1 |
| EMP sub-swarm | 8, 6, 9, 3 |

Fig 17
Revenue function of the missile sub-swarm in each round of negotiation"
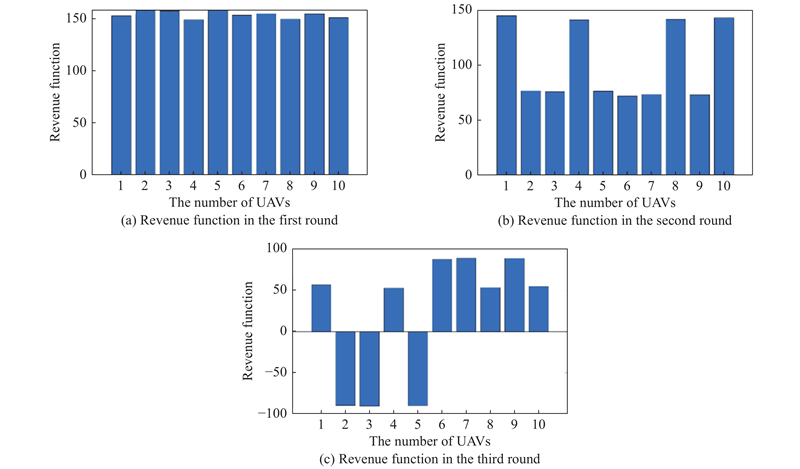
Fig 18
Revenue function of the laser sub-swarm in each round of negotiation"
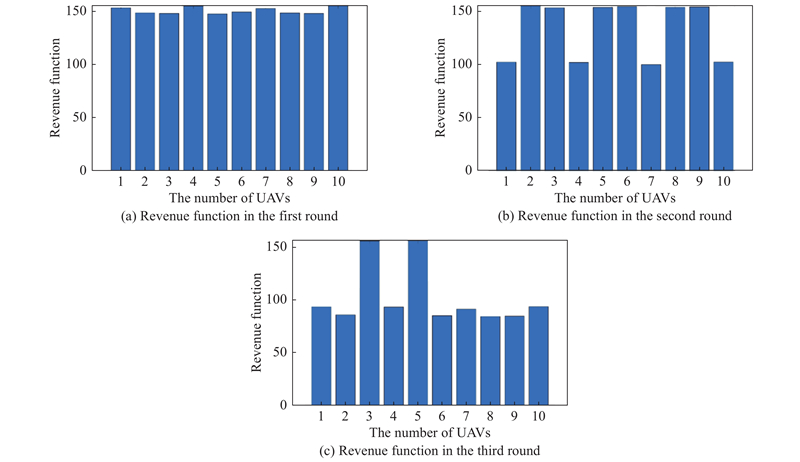
Fig 19
Revenue function of the EMP sub-swarm in each round of negotiation"
Table 8
Results of the double-layer negotiation"
| Sub-swarm | UAV number | Task number |
| Missile sub-swarm | UAV1 | 10, 5 |
| UAV2 | 7, 10 | |
| UAV3 | 7, 10 | |
| UAV4 | 10 | |
| UAV5 | 7, 10 | |
| UAV6 | 7, 5 | |
| UAV7 | 7, 5 | |
| UAV8 | 10, 5 | |
| UAV9 | 7, 5 | |
| UAV10 | 10, 5 | |
| Laser sub-swarm | UAV11 | 4, 1 |
| UAV12 | 2 | |
| UAV13 | 1 | |
| UAV14 | 4, 1 | |
| UAV15 | 1 | |
| UAV16 | 2 | |
| UAV17 | 4 | |
| UAV18 | 2 | |
| UAV19 | 2 | |
| UAV20 | 4, 1 | |
| EMP sub-swarm | UAV21 | 8, 6, 3 |
| UAV22 | 8, 9 | |
| UAV23 | 8, 9 | |
| UAV24 | 6, 3 | |
| UAV25 | 8, 6, 3 | |
| UAV26 | 6, 9 | |
| UAV27 | 6, 9 | |
| UAV28 | 8, 9, 3 | |
| UAV29 | 8, 9, 3 | |
| UAV30 | 8, 9 |
Fig 20
Attack task allocation results of the missile sub-swarm"
Fig 21
Attack task allocation results of the laser sub-swarm"
Fig 22
Attack task allocation results of the EMP sub-swarms"
Table 9
Comparison of the performance of the two methods"
| Evaluation metrics | Improved CNP algorithm | Basic CNP algorithm |
| Average attack effectiveness | 55.61 | 35.68 |
| Allocation time/s | 0.341 | 0.627 |
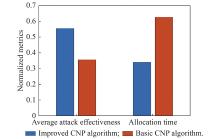
Fig 23
Comparison chart of normalized assessment metrics for both algorithms"
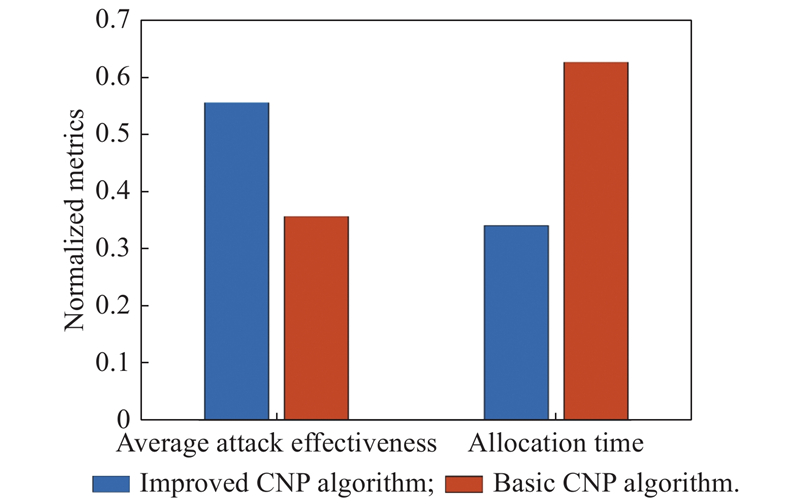
Table 10
Information on the new emergency tasks"
| Parameter | Location/km | Missile defense capability | Laser defense capability | EMP defense capability | Attack revenue | Latest time/h | Number of UAVs required |
| Task 11 | (100,10) | 36 | 21 | 61 | 100 | 1.2 | 5 |
| Task 12 | (140,30) | 65 | 19 | 49 | 100 | 1.2 | 4 |
| Task 13 | (170,40) | 85 | 67 | 24 | 100 | 1.2 | 5 |
Table 11
Final reallocation results"
| Formation | UAV number | Task number |
| Missile sub-swarm | UAV1 | 12, 10, 5 |
| UAV2 | 7, 10 | |
| UAV3 | 7, 10 | |
| UAV4 | 12, 10 | |
| UAV5 | 7, 10 | |
| UAV6 | 7, 5 | |
| UAV7 | 7, 5 | |
| UAV8 | 12, 10, 5 | |
| UAV9 | 7, 5 | |
| UAV10 | 12, 10, 5 | |
| Laser sub-swarm | UAV11 | 4, 1 |
| UAV12 | 11, 2 | |
| UAV13 | 2, 2 | |
| UAV14 | 4, 1 | |
| UAV15 | 11, 1 | |
| UAV16 | 11, 2 | |
| UAV17 | 4 | |
| UAV18 | 11, 1 | |
| UAV19 | 11, 2 | |
| UAV20 | 4, 1 | |
| EMP sub-swarm | UAV21 | 8, 6, 9 |
| UAV22 | 8, 13, 3 | |
| UAV23 | 8, 13, 3 | |
| UAV24 | 6, 9 | |
| UAV25 | 8, 6, 9 | |
| UAV26 | 6, 9, 3 | |
| UAV27 | 6, 9, 3 | |
| UAV28 | 8, 13, 9 | |
| UAV29 | 8, 13, 9 | |
| UAV30 | 8, 13, 3 |
Table 12
Comparison of the initial allocation time and reallocation time s"
| Allocation time | Reallocation time |
| 0.341 | 0.404 |
| 1 |
SU J L, WANG H An improved adaptive differential evolution algorithm for single unmanned aerial vehicle multitasking. Defence Technology, 2021, 17 (6): 1967- 1975.
doi: 10.1016/j.dt.2021.07.008 |
| 2 |
WANG Z, LIU L, LONG T, et al Multi-UAV reconnaissance task allocation for heterogeneous targets using an opposition-based genetic algorithm with double-chromosome encoding. Chinese Journal of Aeronautics, 2018, 31 (2): 339- 350.
doi: 10.1016/j.cja.2017.09.005 |
| 3 |
HAN B, JIANG J, YU C J Distributed fault-tolerant formation control for multiple unmanned aerial vehicles under actuator fault and intermittent communication interrupt. Proceedings of the Institution of Mechanical Engineers. Part I, Journal of Systems and Control Engineering, 2021, 235 (7): 1064- 1083.
doi: 10.1177/0959651820979088 |
| 4 | YE Z P, ZHOU Q R Performance evaluation indicators of space dynamic networks under broadcast mechanism. Space: Science and Technology, 2021, 2021, 9826517. |
| 5 |
HUANG S H, HUANG Y H, BLAZQUEZ C A, et al Solving the vehicle routing problem with drone for delivery services using an ant colony optimization algorithm. Advanced Engineering Informatics, 2022, 51, 101536.
doi: 10.1016/j.aei.2022.101536 |
| 6 |
BI J, ZHOU G, ZHOU Y Q, et al Artificial electric field algorithm with greedy state transition strategy for spherical multiple traveling salesmen problem. International Journal of Computational Intelligence Systems, 2022, 15, 5.
doi: 10.1007/s44196-021-00059-0 |
| 7 |
KLOSTER K, MOEINI M, VIGO D, et al The multiple traveling salesman problem in presence of drone- and robot-supported packet stations. European Journal of Operational Research, 2023, 305 (2): 630- 643.
doi: 10.1016/j.ejor.2022.06.004 |
| 8 |
QIU H F, GOOI H B A unified MILP solution framework for adaptive robust scheduling problems with mixed-integer recourse objective. IEEE Trans. on Power Systems, 2023, 38 (1): 952- 955.
doi: 10.1109/TPWRS.2022.3207067 |
| 9 |
ZHU D Q, HUANG H, YANG S X Dynamic task assignment and path planning of multi-AUV system based on an improved self-organizing map and velocity synthesis method in three-dimensional underwater workspace. IEEE Trans. on Cybernetics, 2013, 43 (2): 504- 514.
doi: 10.1109/TSMCB.2012.2210212 |
| 10 |
SHIMA T, RASMUSSEN S J, SPARKS A G, et al Multiple task assignments for cooperating uninhabited aerial vehicles using genetic algorithms. Computers and Operations Research, 2006, 33 (11): 3252- 3269.
doi: 10.1016/j.cor.2005.02.039 |
| 11 |
ZHOU H, ZHAO H, HUANG H Q, et al Integrated guidance and control design of the suicide UCAV for terminal attack. Journal of Systems Engineering and Electronics, 2017, 28 (3): 546- 555.
doi: 10.21629/JSEE.2017.03.14 |
| 12 | YUAN M S, ZHOU T L, CHEN M Improved lazy theta* algorithm based on octree map for path planning of UAV. Defence Technology, 2023, 23, 8- 18. |
| 13 |
XING H X, WU H, CHEN Y, et al A cooperative interference resource allocation method based on improved firefly algorithm. Defence Technology, 2021, 17 (4): 1352- 1360.
doi: 10.1016/j.dt.2020.07.006 |
| 14 |
LIU P X, WU Z, GU W, et al An improved spatial branch-and-bound algorithm for non-convex optimal electricity-gas flow. IEEE Trans. on Power Systems, 2022, 37 (2): 1326- 1339.
doi: 10.1109/TPWRS.2021.3101883 |
| 15 | SHI Z M, GONG D W, YAO X J, et al. New task oriented recommendation method based on Hungarian algorithm in crowdsourcing platform. Proc. of the IEEE World Congress on Services, 2020: 134−144. |
| 16 |
MOON S T, LEE D H, LEE D, et al Energy-efficient swarming flight formation transitions using the improved fair Hungarian algorithm. Sensors, 2021, 21 (4): 1260.
doi: 10.3390/s21041260 |
| 17 |
WU H S, LI H, XIAO R B A blockchain bee colony double inhibition labor division algorithm for spatio-temporal coupling task with application to UAV swarm task allocation. Journal of Systems Engineering and Electronics, 2021, 32 (5): 1180- 1199.
doi: 10.23919/JSEE.2021.000101 |
| 18 |
ZHENG Z X, GUO J, GILL E Swarm satellite mission scheduling and planning using Hybrid dynamic mutation genetic algorithm. Acta Astronautica, 2017, 137, 243- 253.
doi: 10.1016/j.actaastro.2017.04.027 |
| 19 |
JIA Z Y, YU J Q, AI X L, et al Cooperative multiple task assignment problem with stochastic velocities and time windows for heterogeneous unmanned aerial vehicles using a genetic algorithm. Aerospace Science and Technology, 2018, 76, 112- 125.
doi: 10.1016/j.ast.2018.01.025 |
| 20 |
GONG D W, PENG C, YAO X J, et al A model of new workers’ accurate acceptance of tasks using capable sensing. Swarm and Evolutionary Computation, 2020, 59, 100732.
doi: 10.1016/j.swevo.2020.100732 |
| 21 |
HU J Q, WU H S, ZHAN R J, et al Self-organized search-attack mission planning for UAV swarm based on wolf pack hunting behavior. Journal of Systems Engineering and Electronics, 2021, 32 (6): 1463- 1476.
doi: 10.23919/JSEE.2021.000124 |
| 22 |
AWAD F H, AL-KUBAISI A, MAHMOOD M Large-scale timetabling problems with adaptive tabu search. Journal of Intelligent Systems, 2022, 31 (1): 168- 176.
doi: 10.1515/jisys-2022-0003 |
| 23 | LIU J M, CHEN Y G, WANG R, et al Complex task planning method of space-aeronautics cooperative observation based on multi-layer interaction. Journal of Systems Engineering and Electronics, 2023, 34 (6): 1550- 1564. |
| 24 |
ZHAI L Z, FENG S H A novel evacuation path planning method based on improved genetic algorithm. Journal of Intelligent and Fuzzy Systems, 2022, 42 (3): 1813- 1823.
doi: 10.3233/JIFS-211214 |
| 25 | QI X G, LI B, FAN Y S, et al A survey of mission planning on UAVs systems based on multiple constraints. CAAI Trans. on Intelligent Systems, 2020, 15 (2): 204- 217. |
| 26 | JIA G W, WANG J F Research review of UAV swarm mission planning method. Systems Engineering and Electronics, 2021, 43 (1): 99- 111. |
| 27 |
ZHEN Z Y, WEN L D, WANG B L, et al Improved contract network protocol algorithm based cooperative target allocation of heterogeneous UAV swarm. Aerospace Science and Technology, 2021, 119, 107054.
doi: 10.1016/j.ast.2021.107054 |
| 28 |
ZHANG C, CHEN J Y, LI Y B, et al Satellite group autonomous operation mechanism and planning algorithm for marine target surveillance. Chinese Journal of Aeronautics, 2019, 32 (4): 991- 998.
doi: 10.1016/j.cja.2019.02.005 |
| 29 | WANG R R, WEI W L, YANG M C, et al Task allocation of multiple UAVs considering cooperative route planning. Acta Aeronautica et Astronautica Sinica, 2020, 41 (S2): 724234. |
| 30 |
YAO W R, QI N M, WAN N, et al An iterative strategy for task assignment and path planning of distributed multiple unmanned aerial vehicles. Aerospace Science and Technology, 2019, 86, 455- 464.
doi: 10.1016/j.ast.2019.01.061 |
| 31 | ARAUJO J F, SUJIT P B, SOUSA J B. Multiple UAV area decomposition and coverage. Proc. of the IEEE Symposium on Computational Intelligence for Security and Defense Applications, 2013: 30−37. |
| 32 |
ZHAO X Y, ZONG Q, TIAN B L, et al Fast task allocation for heterogeneous unmanned aerial vehicles through reinforcement learning. Aerospace Science and Technology, 2019, 92, 588- 594.
doi: 10.1016/j.ast.2019.06.024 |
| 33 |
YAO F, LI J T, CHEN Y N, et al Task allocation strategies for cooperative task planning of multi-autonomous satellite constellation. Advances in Space Research, 2019, 63 (2): 1073- 1084.
doi: 10.1016/j.asr.2018.10.002 |
| 34 |
LI Z Q, DOU Y J, XIA B Y, et al System portfolio selection based on GRA method under hesitant fuzzy environment. Journal of Systems Engineering and Electronics, 2022, 33 (1): 120- 133.
doi: 10.23919/JSEE.2022.000013 |
| 35 |
LUO Y L, JIANG X Q, ZHONG S C, et al Multisatellite task allocation and orbit planning for asteroid terminal defence. Aerospace, 2022, 9 (7): 364.
doi: 10.3390/aerospace9070364 |
| [1] | Boyu QIN, Dong ZHANG, Shuo TANG, Yang XU. Two-layer formation-containment fault-tolerant control of fixed-wing UAV swarm for dynamic target tracking [J]. Journal of Systems Engineering and Electronics, 2023, 34(6): 1375-1396. |
| [2] | Zhiwen XIAO, Xiaowei FU. A cooperative detection game: UAV swarm vs. one fast intruder [J]. Journal of Systems Engineering and Electronics, 2023, 34(6): 1565-1575. |
| [3] | Jie LI, Xiaoyu DANG, Sai LI. DQN-based decentralized multi-agent JSAP resource allocation for UAV swarm communication [J]. Journal of Systems Engineering and Electronics, 2023, 34(2): 289-298. |
| [4] | Yaozhong ZHANG, Yike LI, Zhuoran WU, Jialin XU. Deep reinforcement learning for UAV swarm rendezvous behavior [J]. Journal of Systems Engineering and Electronics, 2023, 34(2): 360-373. |
| [5] | Hao LI, Hemin SUN, Ronghua ZHOU, Huainian ZHANG. Hybrid TDOA/FDOA and track optimization of UAV swarm based on A-optimality [J]. Journal of Systems Engineering and Electronics, 2023, 34(1): 149-159. |
| [6] | Yangyang JIANG, Yan GAO, Wenqi SONG, Yue LI, Quan QUAN. Bibliometric analysis of UAV swarms [J]. Journal of Systems Engineering and Electronics, 2022, 33(2): 406-425. |
| [7] | Jinqiang HU, Husheng WU, Renjun ZHAN, Rafik MENASSEL, Xuanwu ZHOU. Self-organized search-attack mission planning for UAV swarm based on wolf pack hunting behavior [J]. Journal of Systems Engineering and Electronics, 2021, 32(6): 1463-1476. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||