
Journal of Systems Engineering and Electronics ›› 2025, Vol. 36 ›› Issue (3): 736-753.doi: 10.23919/JSEE.2025.000073
• SYSTEMS ENGINEERING • Previous Articles
Ning WANG1,2( ), Xiaolong LIANG1,2,*(), Zhe LI1,2(), Yueqi HOU1,2(), Aiwu YANG1,2()
), Xiaolong LIANG1,2,*(), Zhe LI1,2(), Yueqi HOU1,2(), Aiwu YANG1,2()
Received:2023-09-05
Online:2025-06-18
Published:2025-07-10
Contact:
Xiaolong LIANG
E-mail:wnlearning@163.com;lxllearning@163.com;kongyanshi@126.com;afeu_hyq@163.com;ai_five@163.com
About author:Ning WANG, Xiaolong LIANG, Zhe LI, Yueqi HOU, Aiwu YANG. Joint planning method for cross-domain unmanned swarm target assignment and mission trajectory[J]. Journal of Systems Engineering and Electronics, 2025, 36(3): 736-753.
Add to citation manager EndNote|Reference Manager|ProCite|BibTeX|RefWorks

Fig 1
Task assignment scheme coding method"
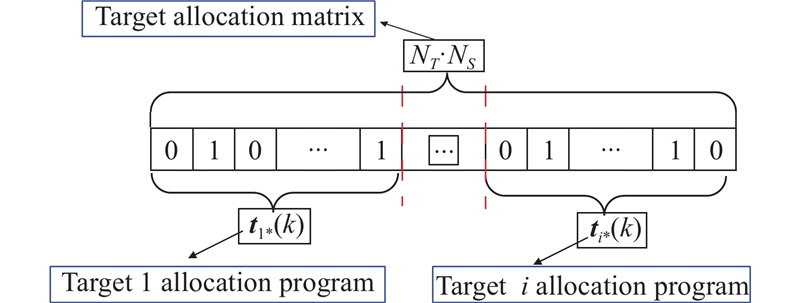

Fig 2
Crossover operation in trajectory optimisation problem-solving"
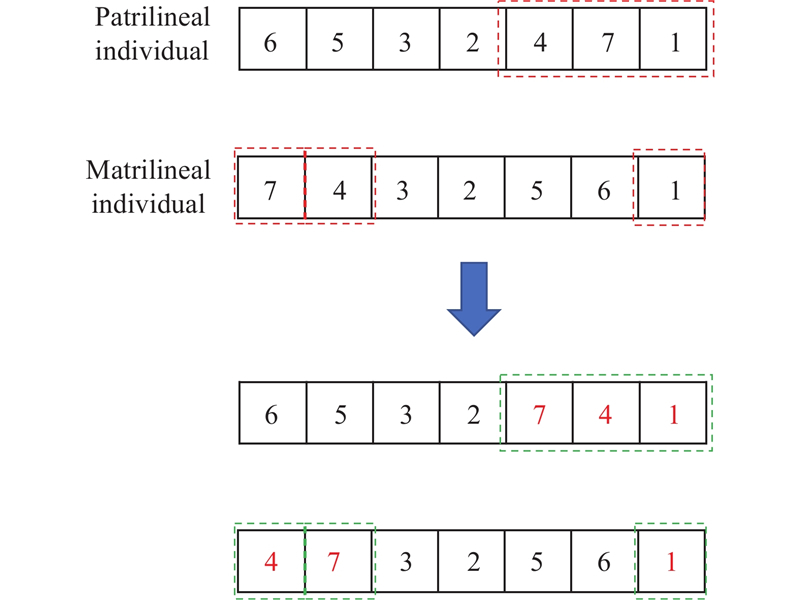

Fig 3
Mutation operation in the optimal solution of the trajectory"
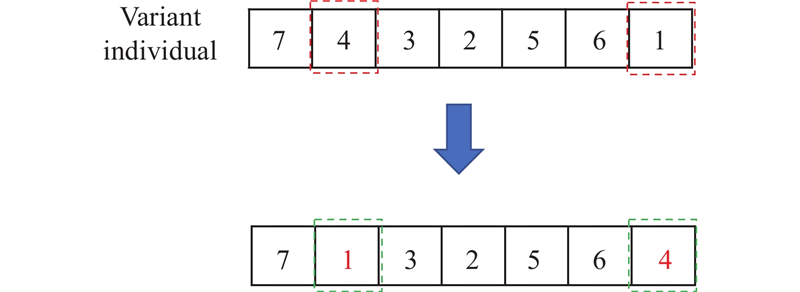
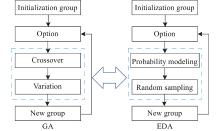
Fig 4
Basic procedures of EDA and GA"
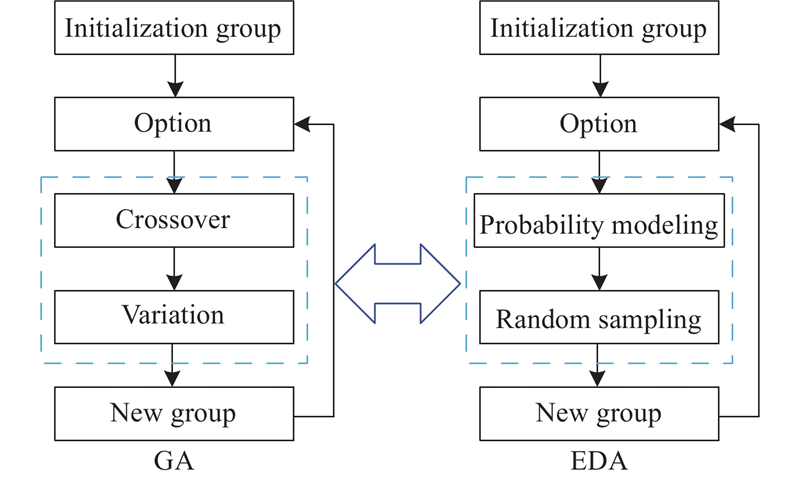
Fig 5
Hybrid EDA-GA algorithm"
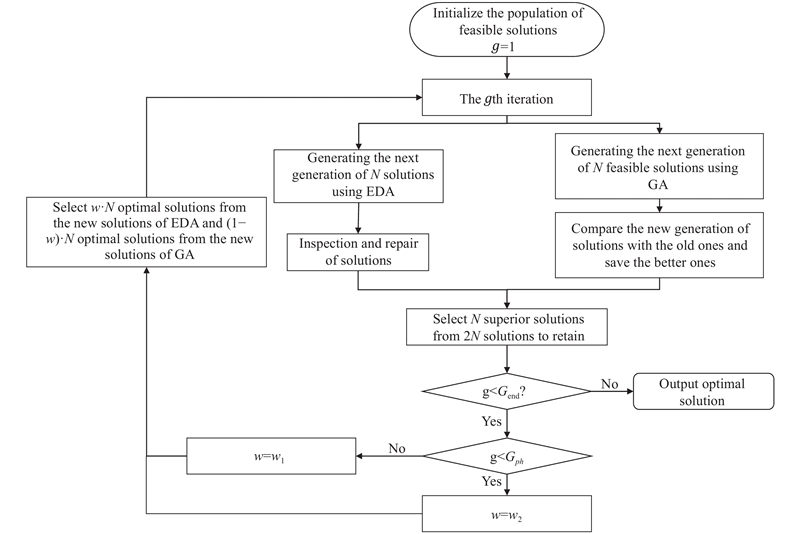
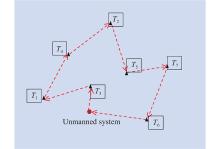
Fig 6
Closed-loop trajectory planning schematic"
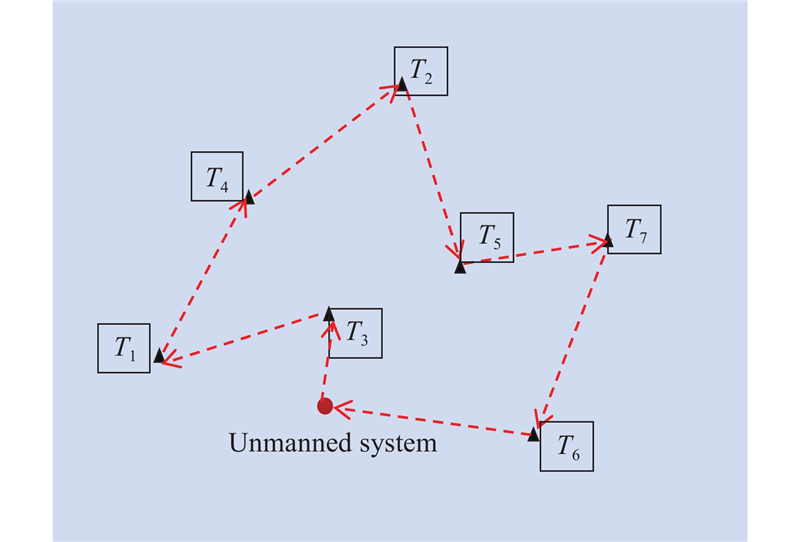
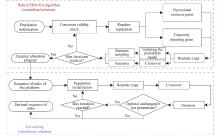
Fig 7
Cross-domain unmanned swarm mission planning framework"
Table 1
Target attribute values"
| Target | Service demand | Position | Requirement complexity |
| {0,0,1,0,0} | (24.11,26.67) | 1 | |
| {0,1,0,0,0} | (13.29,23.03) | 1 | |
| {1,0,1,0,0} | (21.05,9.91) | 2 | |
| {0,1,0,1,0} | (37.13,4.41) | 2 | |
| {1,1,0,0,1} | (11.45,22.48) | 3 | |
| {1,1,0,1,0} | (44.91,7.86) | 3 | |
| {1,1,1,1,0) | (28.48,5.23) | 4 | |
| {1,1,1,0,1} | (30.56,23.95) | 4 | |
| {1,2,1,1,0} | (11.35,24.21) | 5 | |
| {1,1,2,1,0} | (31.63,2.05) | 5 | |
| {2,2,1,0,1} | (32.65,10.17) | 6 | |
| {1,2,2,1,0} | (46.19,9.45) | 6 | |
| {0,0,0,0,1} | (52.52,14.72) | 1 | |
| {1,0,1,0,0} | (44.53,8.82) | 2 | |
| {0,1,0,1,1} | (55.76,33.87) | 3 | |
| {0,0,1,0,0} | (55.95,15.44) | 1 | |
| {0,0.0,0,0} | (57.1,37.21) | 0 | |
| {0,0.1,0.1} | (26.96.28.77) | 2 | |
| {1,1,0,0,0} | (30.23,14.84) | 2 | |
| {1,1,0,0,1} | (48.14,7.05) | 3 | |
| {0,0,1,0,0} | (5.27,15.65) | 1 | |
| {0,0,1,1,1} | (26.96,4.47) | 3 | |
| {0,0,0,1,1} | (39.92,39.66) | 2 | |
| {0,0,1,0,0) | (33.37,26.74) | 1 | |
| {0,1,0,1,1} | (13.06,29.17) | 3 | |
| {1,0,1,0,0) | (44.84,17.94) | 2 | |
| {0,1,0,0,0} | (55.46,14.15) | 1 | |
| {0,0,1,0,1} | (12.25,36.42) | 2 | |
| {0,1,0,1,0} | (38.9,36.55) | 2 | |
| {1,1,1,1,1} | (21.36,18.44) | 5 | |
| {1,0,1,11} | (27.96;38.55) | 4 | |
| {0,0,1,0,1} | (50.35,25.4) | 2 | |
| {1,1,1,0,0} | (45.82,0.57) | 3 | |
| {1,1,0,1,1} | (1.74,4.17) | 4 | |
| {1,0,0,0,0} | (19.05,13.14) | 1 | |
| {1,1,0,0,1} | (37.28,13.16) | 3 | |
| {0,0,0,1,1} | (0.28,33.45) | 2 | |
| {0,0,1,1,1} | (17.76,13.52) | 3 | |
| {0,1,0,1,0} | (4.99,20.29) | 2 | |
| {0,1,0,0,1} | (52.74,37.08) | 2 |
Table 2
Value of the unmanned system attribute"
| Platform | Service provision | Position | Platform category |
| {0 0,0,2,2} | (38.89,4.34) | UUV | |
| {2,0,0,0,0} | (37.3,27.26) | UAV | |
| {1,1,2,1,2} | (54.46, 15.65) | USV | |
| {2 0,0,0,0} | (39.35,28.31) | UAV | |
| {1,1,2,1,2} | (50.53,5.21) | USV | |
| {2 0,0,1,0} | (4.21,16.25) | UAV | |
| {1,1,0,1,2} | (13.62,26.46) | USV | |
| {2,0,0,0,0} | (50.13, 24.62) | UAV | |
| {1,1,2,1,2} | (11.98, 15.3) | USV | |
| {2,0,0,1,0} | (16.82, 24.09) | UAV | |
| {0,0,0,0,2} | (36.61,3.02) | UUV | |
| {0 0,0,0,2} | (24.24, 26.24) | UUV | |
| {0,0,0,2,0} | (22.34,24.31) | UUV | |
| {2,0,0,0,0} | (46.18,22.44) | UAV | |
| {2,0,0,1,0} | (12.01,6.12) | UAV | |
| {2,0,1,0,0} | (48.1,0.55) | UAV | |
| {1,1,2,1,2} | (46.05,11.61) | USV | |
| {2,0,0,1,0} | (49.5, 28.06) | UAV | |
| {2 0,0,1,0} | (16.49,4.97) | UAV | |
| {1,1,0,1,2} | (36.29,22.81) | USV | |
| {2,0,1,0, 0} | (0.64,24.39) | UAV | |
| {2 0,0,0,0} | (29.91,20.19) | UAV | |
| {0,0,0,2,0} | (59.36, 5.38) | UUV | |
| {2,0,1,0,0} | (50.92,24.0) | UAV | |
| {2,0,1,0,0} | (13.14,19.1) | UAV |
Fig 8
Unmanned system and target distribution map"
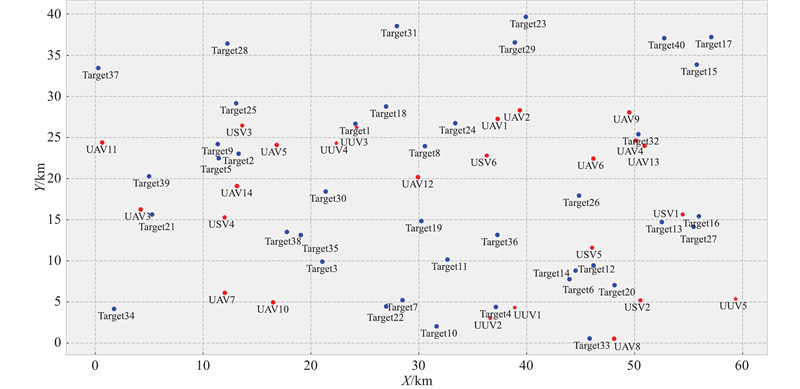
Table 3
Typical unmanned system performance indicators"
| Platform category | Model | Optical infrared detection | Interference | Anti-aircraft attack | Anti-surface attack | Anti-underwater attack |
| UAV | 1 | √√ | × | × | × | × |
| UAV | 2 | √√ | × | √ | × | × |
| UAV | 3 | √√ | × | × | √ | × |
| USV | 1 | √ | √ | × | √ | √√ |
| USV | 2 | √ | √ | √√ | √ | × |
| USV | 3 | √ | √ | √√ | √ | √√ |
| UUV | 1 | × | × | × | × | √√ |
| UUV | 2 | × | × | × | √√ | × |
| UUV | 3 | × | × | × | √√ | √√ |
Table 4
Algorithm parameters"
| Parameter | Value | Parameter | Value | |
| 40 | 25 | |||
| 1 | 1 | |||
| 3 | ||||
| 500 | ||||
| 0.4 | 0.2 | |||
| 400 | ||||
| 0.4 | 0.6 | |||
| 0.1 | 200 | |||
| 0.5 | 500 |
Table 5
Calculation results of the sample target allocation"
| Platform | Mission sequence | Track length/km | Time/s |
| 63.40 | |||
| 86.38 | |||
| 115.61 | |||
| 40.71 | |||
| 180.36 | |||
| 113.93 | |||
| 119.01 | |||
| 74.48 | |||
| 132.32 | |||
| 101.42 | |||
| 91.26 | |||
| 117.43 | |||
| 113.73 | |||
| 96.72 | |||
| 85.83 | |||
| 93.21 | |||
| 172.50 | |||
| 72.40 | |||
| 76.56 | |||
| 181.44 | |||
| 98.61 | |||
| 80.65 | |||
| 78.18 | |||
| 93.38 | |||
| 75.57 |
Fig 9
Convergence curve of the objective function"
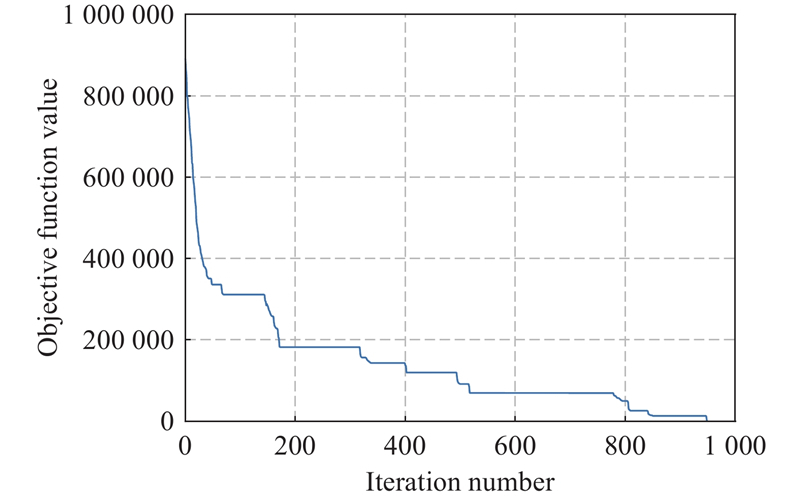
Fig 10
Convergence of the task resource constraint term"
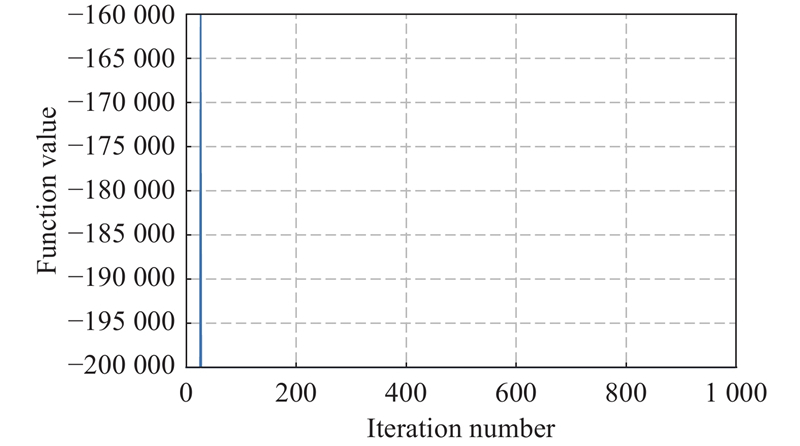
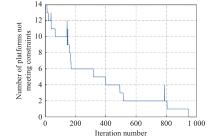
Fig 11
Convergence of the voyage constraint term"
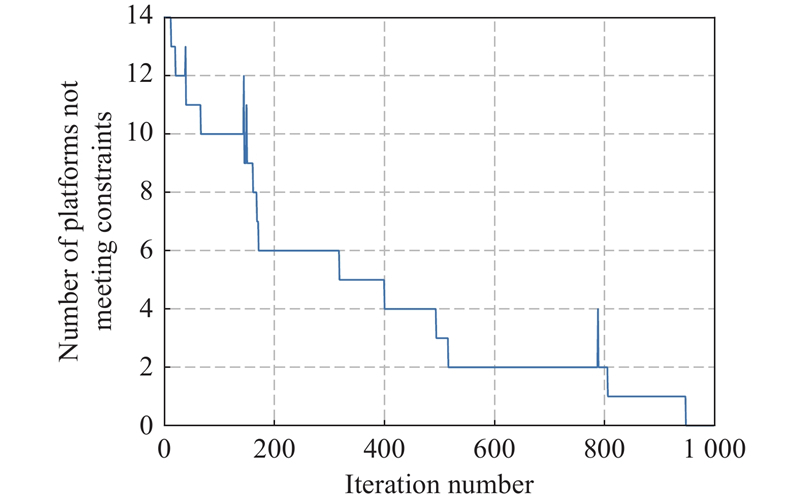
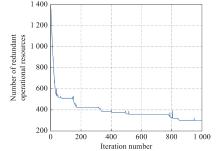
Fig 12
Convergence of redundant combat resources"
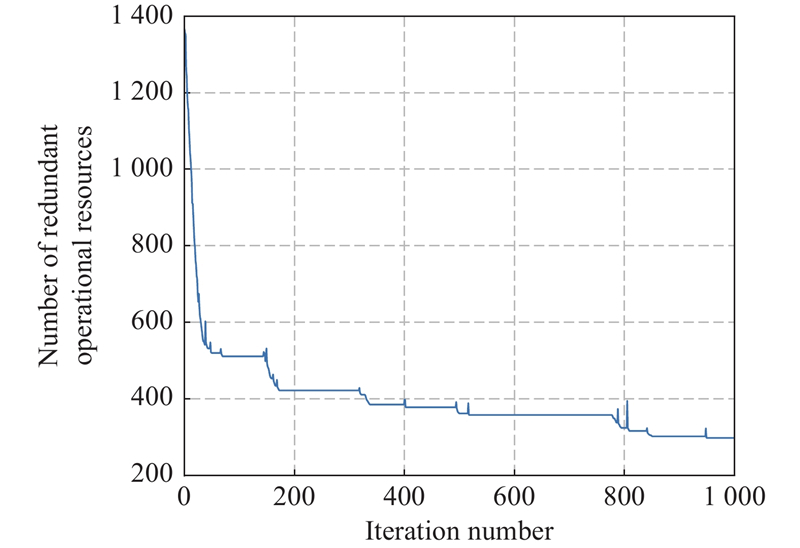
Fig 13
Task time convergence"
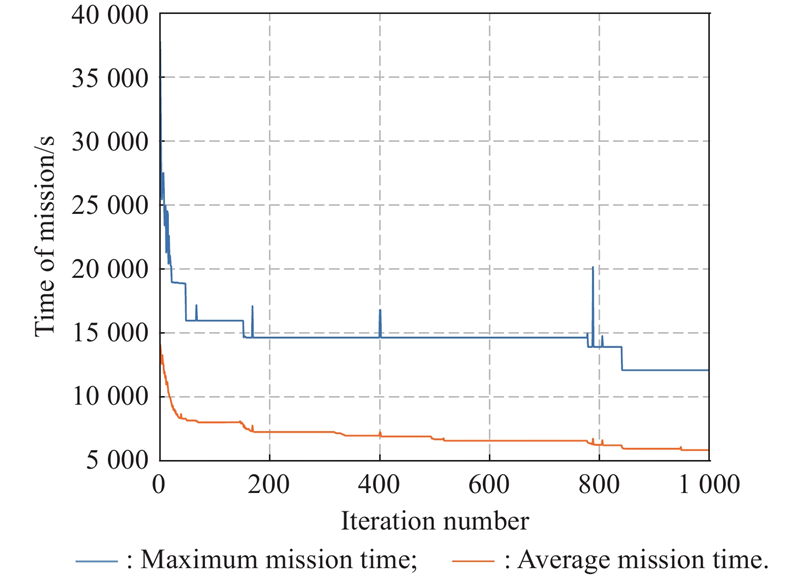
Table 6
Calculation results of the sample trajectory optimisation"
| Platform | Mission sequence | Track length/km | Time/s |
| 63.40 | |||
| 86.38 | |||
| 111.05 | |||
| 40.71 | |||
| 133.52 | |||
| 113.93 | |||
| 110.06 | |||
| 62.09 | |||
| 130.52 | |||
| 101.42 | |||
| 91.26 | |||
| 117.43 | |||
| 110.25 | |||
| 84.46 | |||
| 85.83 | 2.86 | ||
| 89.35 | |||
| 151.65 | |||
| 72.40 | |||
| 75.91 | |||
| 124.83 | |||
| 97.86 | |||
| 78.29 | |||
| 78.18 | |||
| 93.38 | |||
| 75.57 |
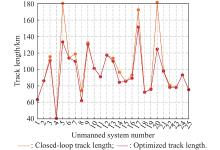
Fig 14
Unmanned swarm closed-loop trajectory with optimised trajectory length"
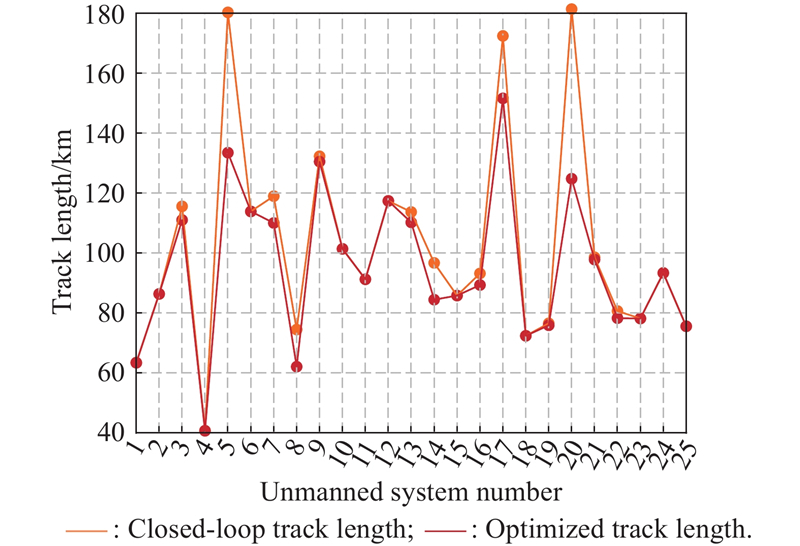
Fig 15
Unmanned swarm two-phase planning mission time comparison"
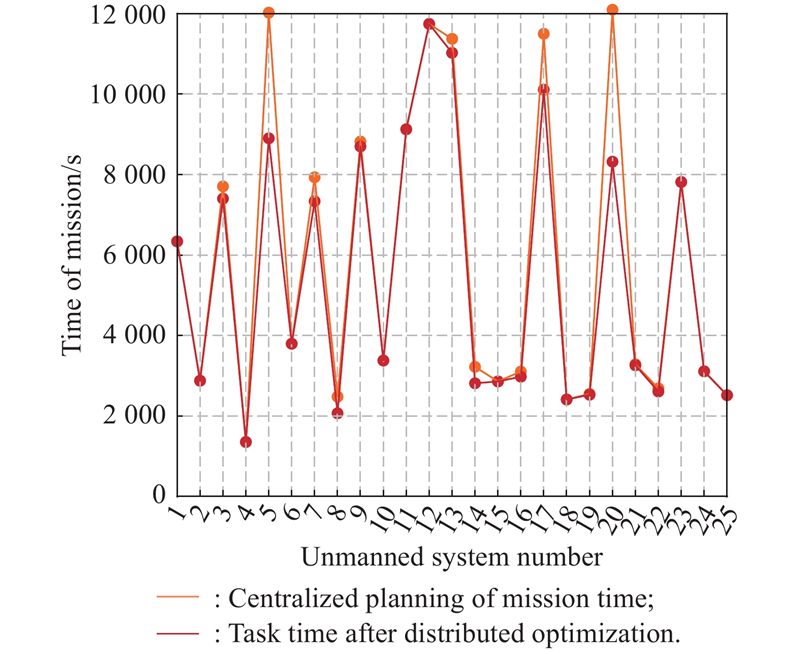
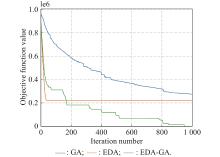
Fig 16
Convergence of the objective functions of the different algorithms"
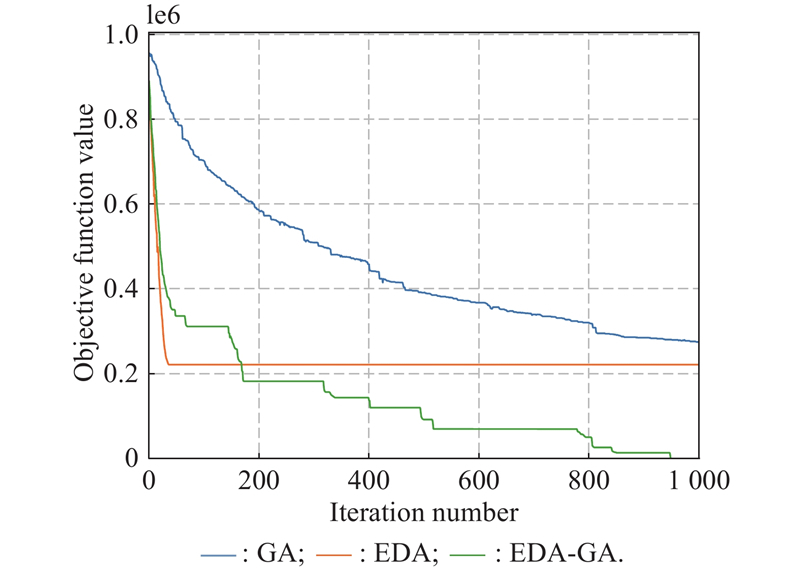
Fig 17
Unmanned system trajectories obtained by the different algorithm-based solutions"
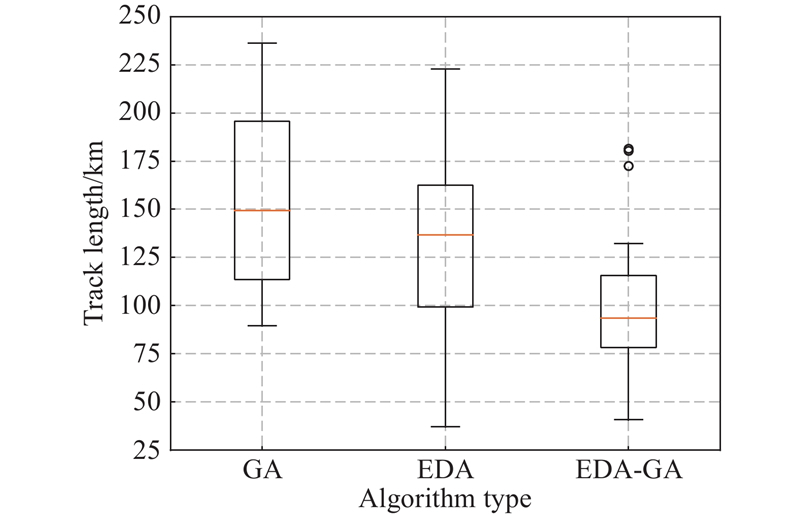
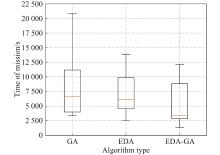
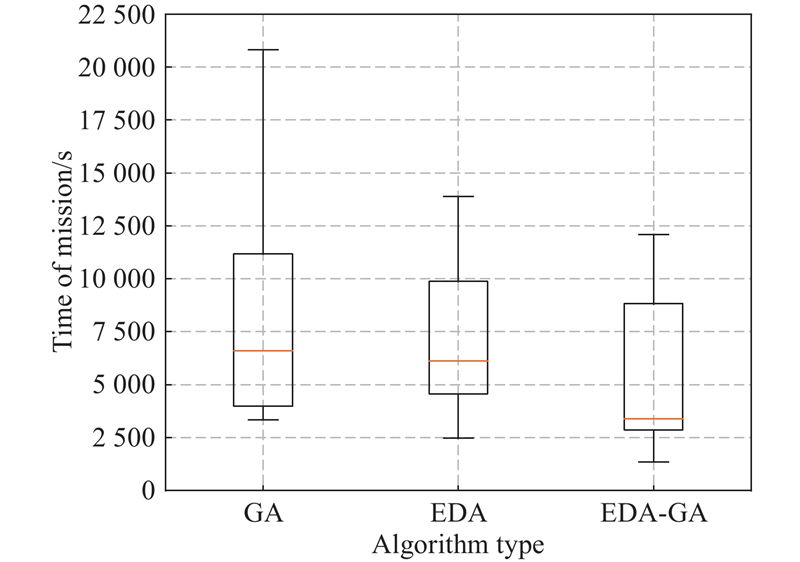
Fig 18
Mission times of unmanned systems obtained by solving the three different algorithms"
| 1 |
ZHANG Y Z, LI Y K, XU J L Deep reinforcement learning for UAV swarm rendezvous behavior. Journal of Systems Engineering and Electronics, 2023, 34 (2): 360- 373.
doi: 10.23919/JSEE.2023.000056 |
| 2 | HUANG G, LI J H AC-DSDE evolutionary algorithm-based cooperative target assignment for multiple UAVs. Acta Automatica Sinica, 2021, 47 (1): 173- 184. |
| 3 |
LI J, DANG X Y, LI S DQN-based decentralized multi-agent JSAP resource allocation for UAV swarm communication. Journal of Systems Engineering and Electronics, 2023, 34 (2): 289- 298.
doi: 10.23919/JSEE.2023.000045 |
| 4 |
WANG Y, CAI M , JIAN X L Consensus model of social network group decision-making based on trust relationship among experts and expert reliability. Journal of Systems Engineering and Electronics, 2023, 34 (6): 1576- 1588.
doi: 10.23919/JSEE.2023.000021 |
| 5 |
ZHANG J D, GUO Y K, ZHENG L H, et al Real-time UAV path planning based on LSTM network. Journal of Systems Engineering and Electronics, 2024, 35 (2): 374- 385.
doi: 10.23919/JSEE.2023.000157 |
| 6 |
WU Y, LOW K H, LV C Cooperative path planning for heterogeneous unmanned vehicles in a search-and-track mission aiming at an underwater target. IEEE Trans. on Vehicular Technology, 2020, 69 (6): 6782- 6787.
doi: 10.1109/TVT.2020.2991983 |
| 7 |
YANG K W, LI J C, LIU M D, et al Complex systems and network science: a survey. Journal of Systems Engineering and Electronics, 2023, 34 (3): 543- 573.
doi: 10.23919/JSEE.2023.000080 |
| 8 |
WANG N, LIANG X L, LI Z, et al PSE-D model-based cooperative path planning for UAV&USV systems in anti-submarine search missions. IEEE Trans. on Aerospace and Electronic Systems, 2024, 60 (5): 6224- 6240.
doi: 10.1109/TAES.2024.3400923 |
| 9 |
LU F X, DAI Q Y, YANG G, et al Online task planning method of anti-ship missile based on rolling optimization. Journal of Systems Engineering and Electronics, 2024, 35 (3): 720- 731.
doi: 10.23919/JSEE.2024.000059 |
| 10 |
CHEN C, QUAN W, SHAO Z, et al Aerial target threat assessment based on gated recurrent unit and self-attention mechanism. Journal of Systems Engineering and Electronics, 2024, 35 (2): 361- 373.
doi: 10.23919/JSEE.2023.000116 |
| 11 |
ROBERGE V, TARBOUCHI M, LABONTE G Comparison of parallel genetic algorithm and particle swarm optimization for real-time UAV path planning. IEEE Trans. on Industrial Informatics, 2013, 9 (1): 132- 141.
doi: 10.1109/TII.2012.2198665 |
| 12 |
CHEN Z W, ZHOU Z M, ZHNAG L G, et al Mission reliability modeling and evaluation for reconfigurable unmanned weapon system-of-systems based on effective operation loop. Journal of Systems Engineering and Electronics, 2023, 34 (3): 588- 597.
doi: 10.23919/JSEE.2023.000082 |
| 13 |
WEI W, WANG J J, FANG Z R, et al 3U: joint design of UAV-USV-UUV networks for cooperative target hunting. IEEE Trans. on Vehicular Technology, 2023, 72 (3): 4085- 4090.
doi: 10.1109/TVT.2022.3220856 |
| 14 |
ZHANG Q Y, LI X Y, ZU T P, et al Belief reliability: a scientific exploration of reliability engineering. Journal of Systems Engineering and Electronics, 2024, 35 (3): 619- 643.
doi: 10.23919/JSEE.2024.000029 |
| 15 |
DUAN X B, FAN Q C, WI W H, et al Belief exponential divergence for D-S evidence theory and its application in multi-source information fusion. Journal of Systems Engineering and Electronics, 2024, 35 (6): 1454- 1468.
doi: 10.23919/JSEE.2024.000101 |
| 16 | WANG F, HUANG Z L, HAN M C, et al Collaborative multi-tasking of heterogeneous UAVs based on KnCMPSO Algorithm. Acta Automatica Sinica, 2023, 49 (2): 399- 414. |
| 17 |
CHEN Y B, YANG D, YU J Q Multi-UAV task assignment with parameter and time-sensitive uncertainties using modified two-part wolf pack search algorithm. IEEE Trans. on Aerospace and Electronic Systems, 2018, 54 (6): 2853- 2872.
doi: 10.1109/TAES.2018.2831138 |
| 18 | ZHANG R P, FENG Y X, YAN Y K Hybrid particle swarm algorithm for cooperative multi-UAV mission assignment. Acta Aeronautica et Astronautica Sinica, 2022, 43 (12): 418- 433. |
| 19 |
ZHANG J, CUI Y N, REN J Dynamic mission planning algorithm for UAV formation in battlefield environment. IEEE Trans. on Aerospace and Electronic Systems, 2023, 59 (4): 3750- 3765.
doi: 10.1109/TAES.2022.3231244 |
| 20 | CAO Y, LONG T, SUN J L, et al Multi-machine distributed timing task assignment driven by non-deadlocking contract network protocol. Journal of Astronautics, 2022, 43 (5): 675- 684. |
| 21 |
LIU J M, CHEN Y G, WANG R, et al Complex task planning method of space-aeronautics cooperative observation based on multi-layer interaction. Journal of Systems Engineering and Electronics, 2023, 34 (6): 1550- 1564.
doi: 10.23919/JSEE.2022.000098 |
| 22 | DAI J, XU F, CHEN Q F Multi-UAV cooperative search area delineation and path planning. Acta Aeronautica et Astronautica Sinica, 2020, 41 (S1): 149- 156. |
| 23 | ZHANG Z X, LONG T, XU G T Revisit mechanism driven cooperative multi-UAV dynamic target search method. Acta Aeronautica et Astronautica Sinica, 2020, 41 (5): 220- 232. |
| 24 | WANG N, LI Z, LIANG X L, et al Cooperative area search by UAV swarm under restricted communication distance conditions. Systems Engineering and Electronics, 2022, 44 (5): 1615- 1625. |
| 25 |
WU Y, WU S B, HU X T Cooperative path planning of UAVs & UGVs for a persistent surveillance task in urban environments. IEEE Internet of Things Journal, 2021, 8 (6): 4906- 4919.
doi: 10.1109/JIOT.2020.3030240 |
| 26 |
ZHENG X M, MA C Y An intelligent target detection method of UAV swarms based on improved KM algorithm. Chinese Journal of Aeronautics, 2021, 34 (2): 539- 553.
doi: 10.1016/j.cja.2020.07.021 |
| 27 |
JIAO Z Q, YAO P Y, ZHANG J Y, et al MAV/UAV task coalition phased-formation method. Journal of Systems Engineering and Electronics, 2019, 30 (2): 402- 414.
doi: 10.21629/JSEE.2019.02.18 |
| 28 |
NY J, FERON E, FRAZZOLI E, et al On the dubins traveling salesman problem. IEEE Trans. on Automatic Control, 2012, 57 (1): 265- 270.
doi: 10.1109/TAC.2011.2166311 |
| 29 |
WANG Z C, ZHANG Y M, ZHOU W H, et al Solving traveling salesman problem in the Adleman-Lipton model. Applied Mathematics and Computation, 2012, 219 (4): 2267- 2270.
doi: 10.1016/j.amc.2012.08.073 |
| 30 | ZHOU S D, SUN Z Q A survey on estimation of distribution algorithms. Acta Automatica Sinica, 2007, 2, 113- 124. |
| 31 |
SUN Y A, YEN G G, YI Z Improved regularity model-based EDA for many-objective optimization. IEEE Trans. on Evolutionary Computation, 2018, 22 (5): 662- 678.
doi: 10.1109/TEVC.2018.2794319 |
| [1] | Weijian PANG, Xinyi MA, Xueming LIANG, Xiaogang LIU, Erwa DONG. Role-based Bayesian decision framework for autonomous unmanned systems [J]. Journal of Systems Engineering and Electronics, 2023, 34(6): 1397-1408. |
| [2] | Feng WU, Xiuluo LIU, Jia WANG, Chao LI, Ying LIU, Jianbin SU, Ailiang ZHANG, Min WANG. Research on agile space emergency launching mission planning simulation and verification method [J]. Journal of Systems Engineering and Electronics, 2023, 34(5): 1267-1284. |
| [3] | Dongdong YAO, Xiaofang WANG, Hai LIN, Zhuping WANG. Leader trajectory planning method considering constraints of formation controller [J]. Journal of Systems Engineering and Electronics, 2023, 34(5): 1294-1308. |
| [4] | Yang ZHAO, Jicheng LIU, Ju JIANG, Ziyang ZHEN. Shuffled frog leaping algorithm with non-dominated sorting for dynamic weapon-target assignment [J]. Journal of Systems Engineering and Electronics, 2023, 34(4): 1007-1019. |
| [5] | Gang LIU, Zhibiao AN, Songyang LAO, Wu LI. Firepower distribution method of anti-ship missile based on coupled path planning [J]. Journal of Systems Engineering and Electronics, 2022, 33(4): 1010-1024. |
| [6] | Zhanwu LI, Yizhe CHANG, Yingxin KOU, Haiyan YANG, An XU, You LI. Approach to WTA in air combat using IAFSA-IHS algorithm [J]. Journal of Systems Engineering and Electronics, 2018, 29(3): 519-529. |
| [7] | Jin ZHOU, Lei SHAO, Huaji WANG, Dayuan ZHANG, Humin LEI. Optimal midcourse trajectory planning considering the capture region [J]. Journal of Systems Engineering and Electronics, 2018, 29(3): 587-600. |
| [8] | Jiang Zhao, Rui Zhou, and Xuelian Jin. Progress in reentry trajectory planning for hypersonic vehicle [J]. Journal of Systems Engineering and Electronics, 2014, 25(4): 627-. |
| [9] | Yu Xue,Yi Zhuang, Tianquan Ni, Siru Ni, and Xuezhi Wen. Self-adaptive learning based discrete differential evolution algorithm for solving CJWTA problem [J]. Journal of Systems Engineering and Electronics, 2014, 25(1): 59-68. |
| [10] | Yu Zhang, Jing Chen, and Lincheng Shen. Hybrid hierarchical trajectory planning for a fixed-wing UCAV performing air-to-surface multi-target attack [J]. Journal of Systems Engineering and Electronics, 2012, 23(4): 536-552. |
| [11] | Jun Wang, Xiaoguang Gao, and Yongwen Zhu. Solving algorithm for TA optimization model based on ACO-SA [J]. Journal of Systems Engineering and Electronics, 2011, 22(4): 628-639. |
| [12] | Wang Yanxia, Qian Longjun, Guo Zhi & Ma Lifeng. Weapon target assignment problem satisfying expected damage probabilities based on ant colony algorithm [J]. Journal of Systems Engineering and Electronics, 2008, 19(5): 939-944. |
| [13] |
Cat Huaiping , Liu Jingxu, Chen Yingvuu & Wang Hao.
Survey of the research on dynamic weapon-target assignment problem
[J]. Journal of Systems Engineering and Electronics, 2006, 17(3): 559-565.
|
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||