
Journal of Systems Engineering and Electronics ›› 2025, Vol. 36 ›› Issue (3): 854-866.doi: 10.23919/JSEE.2025.000074
• CONTROL THEORY AND APPLICATION • Previous Articles
Hongen LI( ), Shilong LI(), Qi WANG(), Xiaoming HUANG()
), Shilong LI(), Qi WANG(), Xiaoming HUANG()
Received:2024-03-22
Online:2025-06-18
Published:2025-07-10
Contact:
Xiaoming HUANG
E-mail:980192418@qq.com;1761704166@qq.com;1623380406@qq.com;huangxm@dlut.edu.cn
About author:Supported by:Hongen LI, Shilong LI, Qi WANG, Xiaoming HUANG. AUV 3D path planning based on improved PSO[J]. Journal of Systems Engineering and Electronics, 2025, 36(3): 854-866.
Add to citation manager EndNote|Reference Manager|ProCite|BibTeX|RefWorks
Fig 1
Marine internal wave environment"
Fig 2
Path smoothing method"
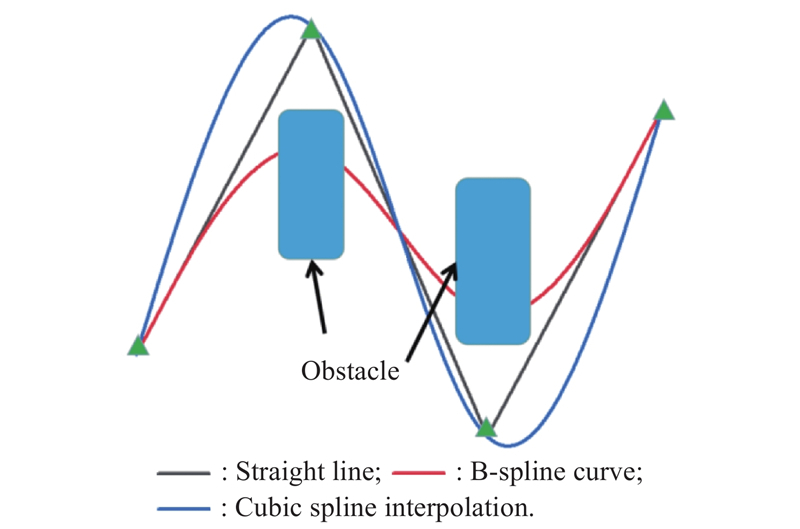

Fig 3
AUV velocity synthesis under the influence of ocean currents"
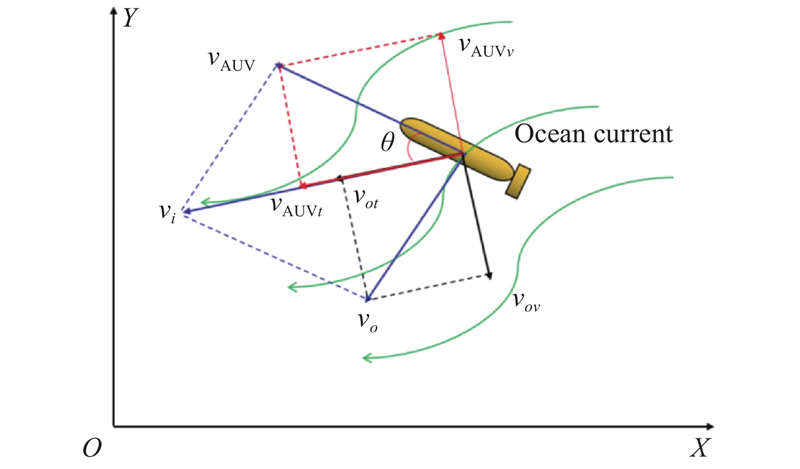
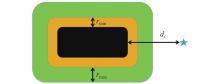
Fig 4
Secure handling of obstacles"
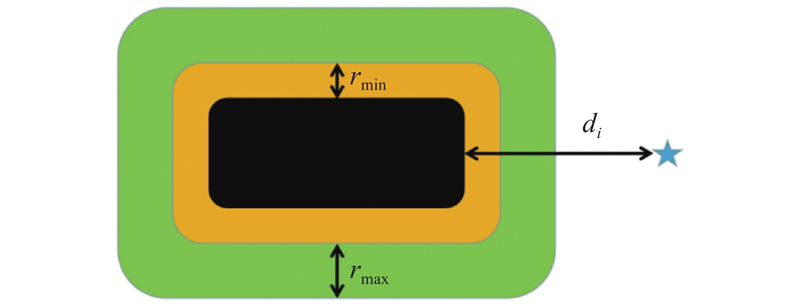
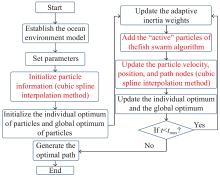
Fig 5
Flow chart of improved PSO algorithm"
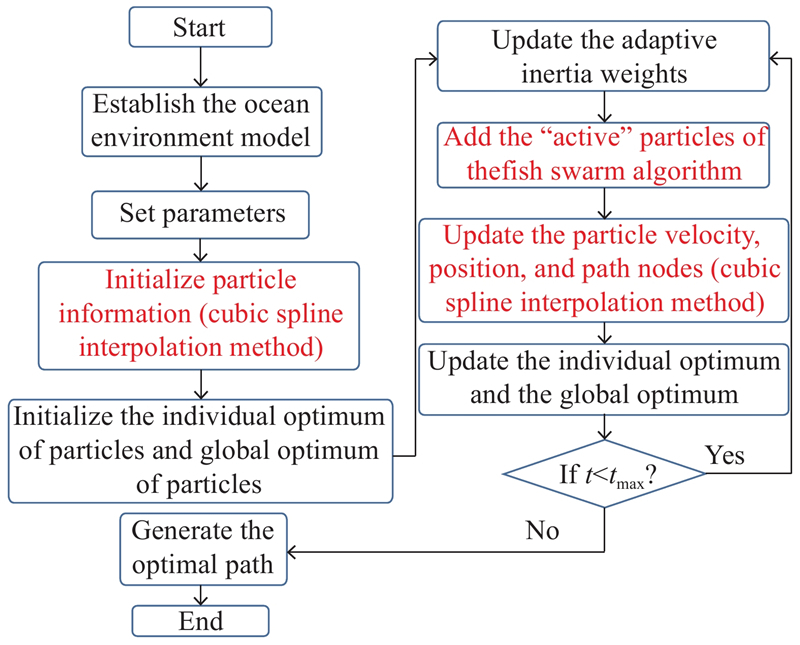
Fig 6
Scatter diagram of 100 Monte Carlo experiments"
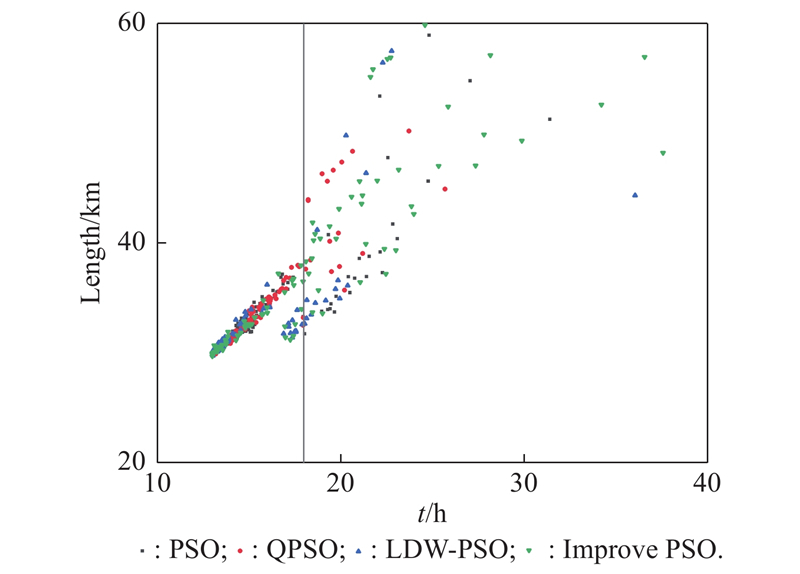
Table 1
Simulation results of 100 Monte Carlo experiments"
| Algorithm | Average time/h | Average length/km | Pass rate |
| PSO | 15.13 | 33.17 | 0.74 |
| QPSO | 15.12 | 33.10 | 0.78 |
| LDW-PSO | 14.64 | 32.28 | 0.55 |
| Improved PSO | 14.05 | 31.35 | 0.85 |
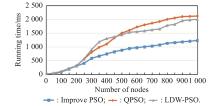
Fig 7
Algorithm running time comparison"
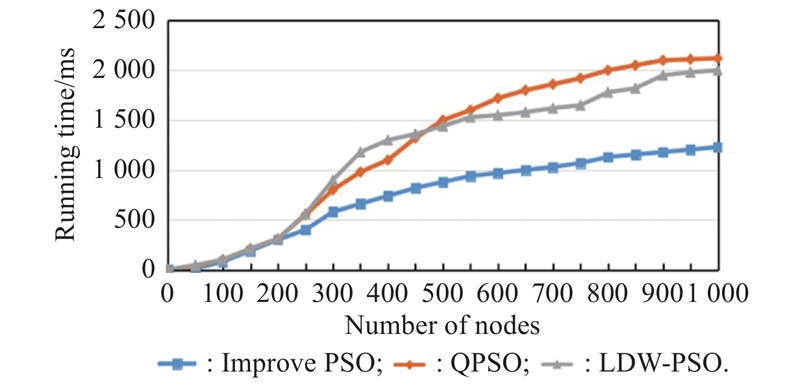
Fig 8
Convergence trajectory of under ocean currents"
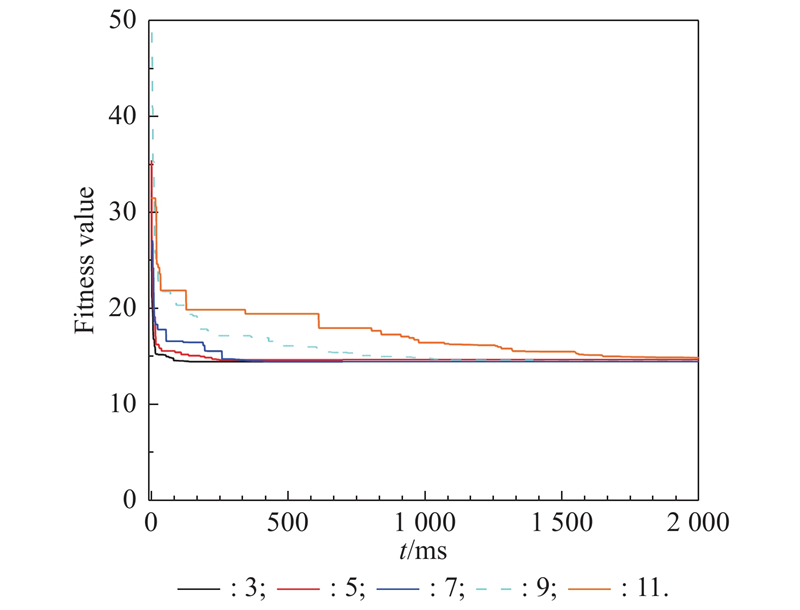
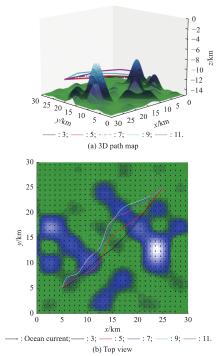
Fig 9
Path planning under ocean currents"
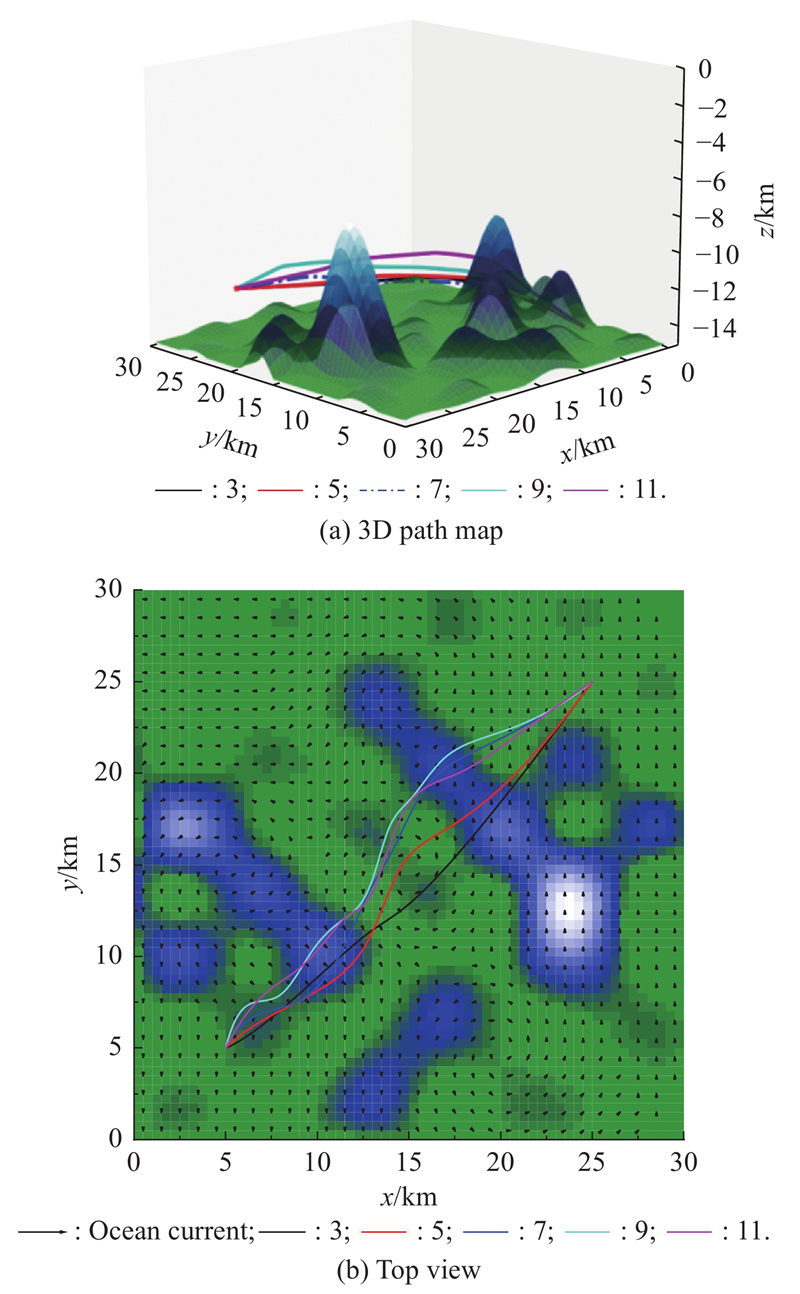
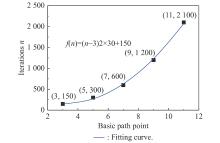
Fig 10
Convergence curves for different basic points"
Fig 11
Path planning under strong ocean currents"
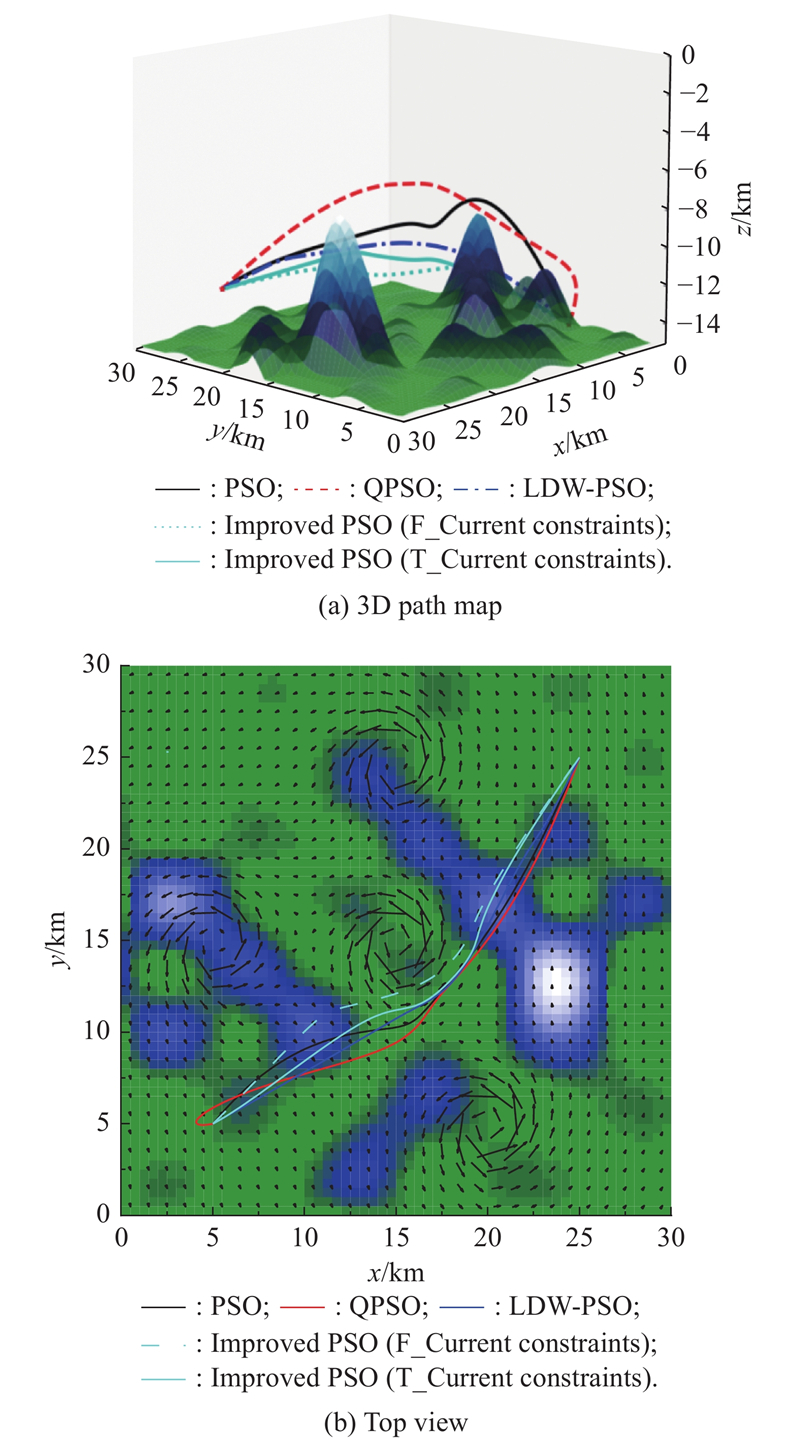
Fig 12
Convergence trajectory of under strong ocean currents"
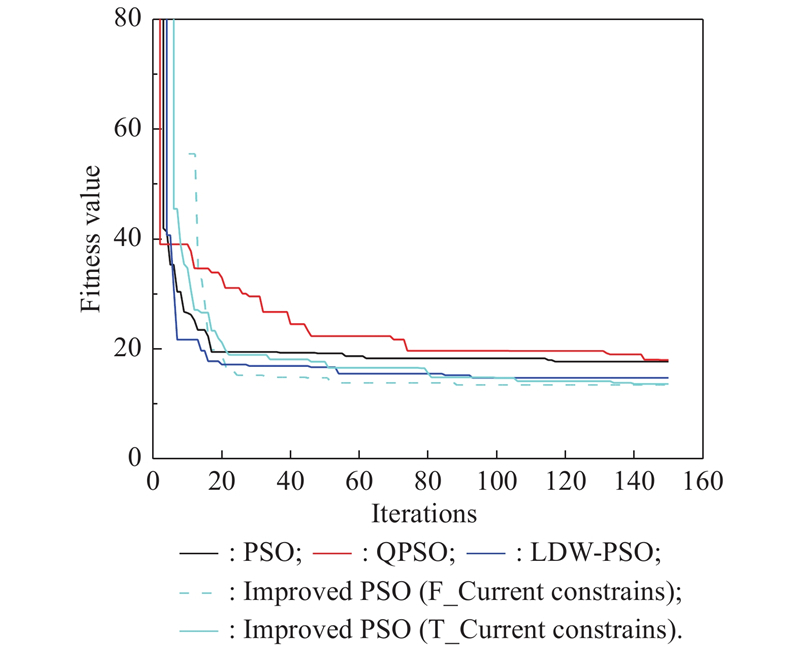
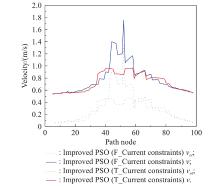
Fig 13
Path nodes velocity"
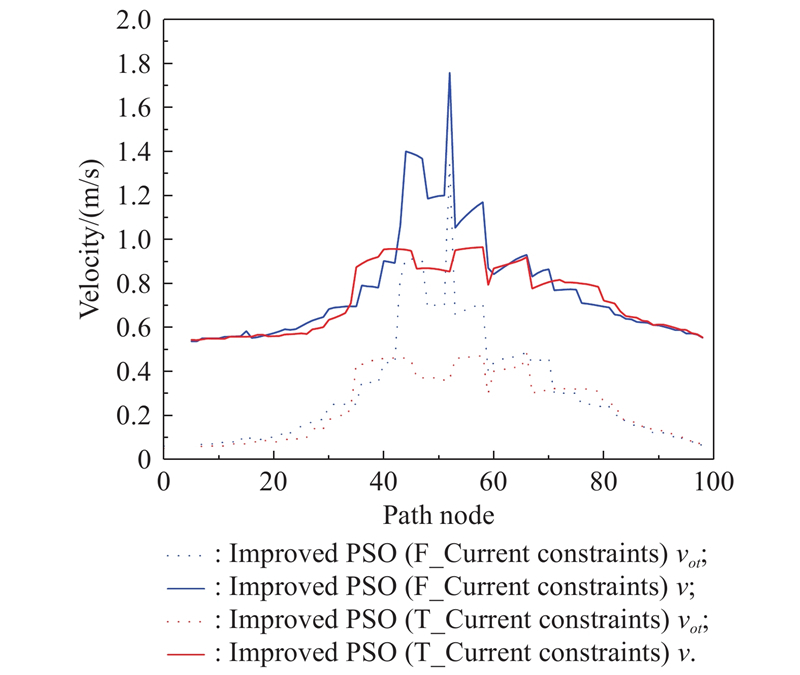
Table 2
Comparative analysis of ocean currents experiments"
| Improved PSO constraint | Sailing time/ h | Average path nodes v/(m/s) | Maximum fluctuation of v/(m/s) | Standard deviation of v/(m/s) |
| F_ ocean currents | 12.74 | 0.765 | 0.705 | 0.247 |
| T_ ocean currents | 13.12 | 0.722 | 0.172 | 0.152 |
Fig 14
Convergence trajectory of internal wave environment"
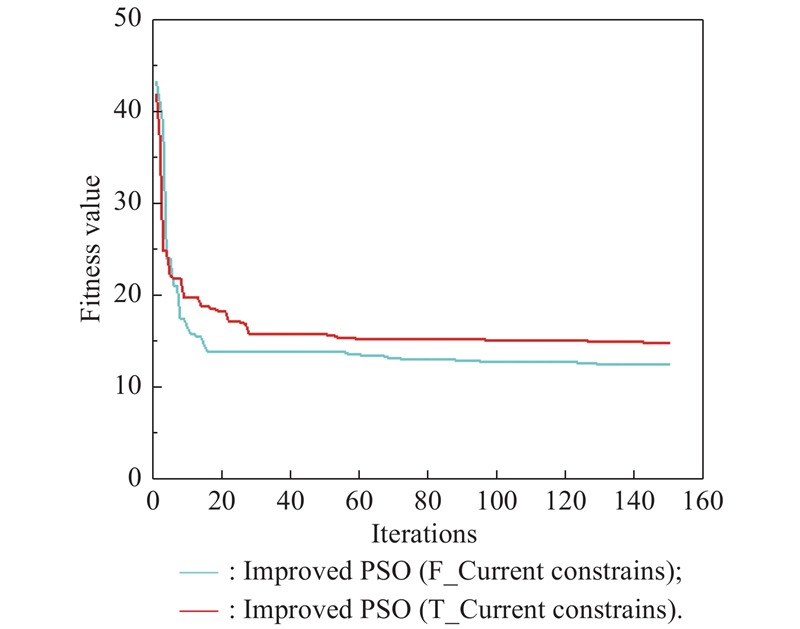
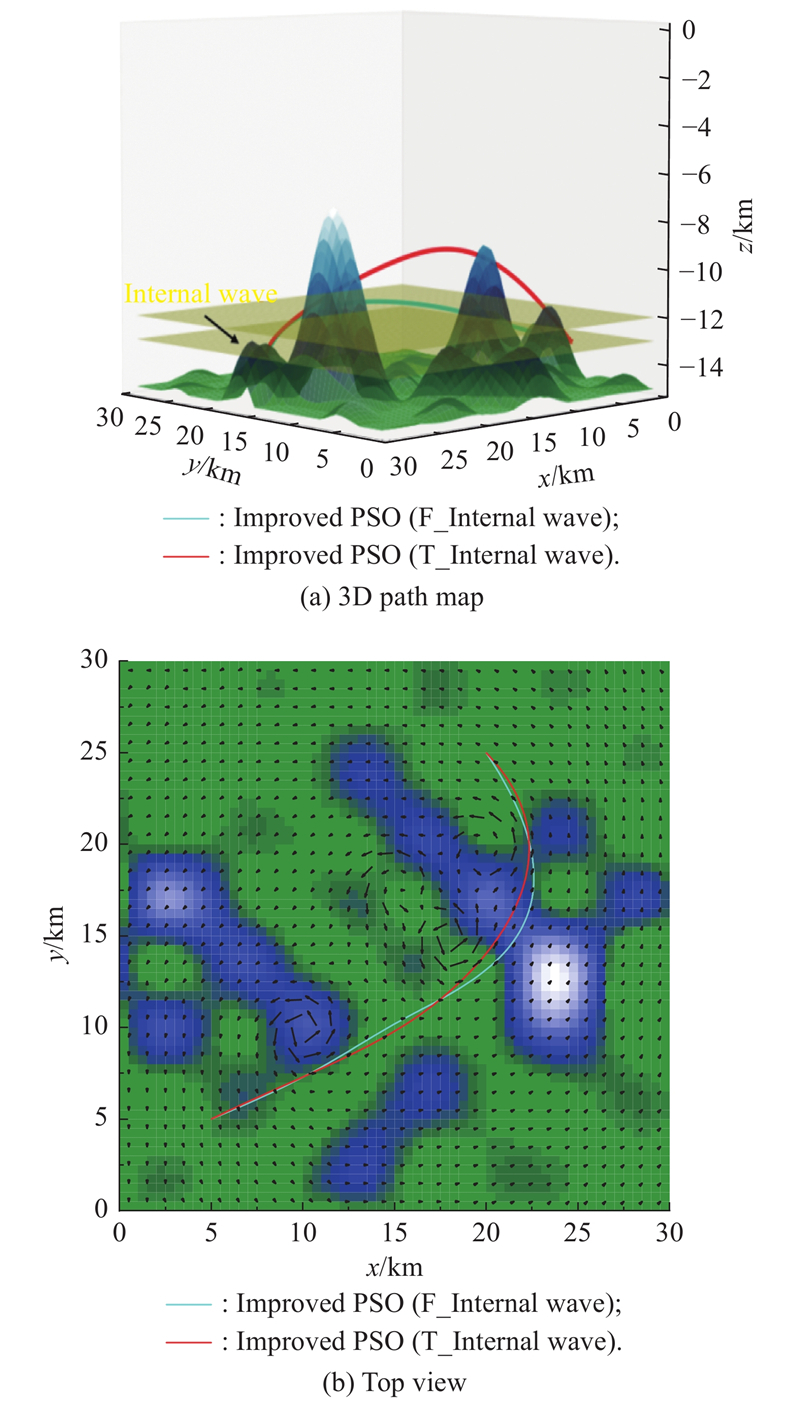
Table 3
Comparative analysis of internal wave experiments"
| Improved PSO constraint | Sailing time/h | Length/ km | Internal wave time/h | Internal wave length/km |
| F_Internal wave | 12.44 | 30.87 | 4.47 | 10.79 |
| T_Internal wave | 12.80 | 31.52 | 2.03 | 4.90 |

Fig 15
Path planning under internal wave environment"
| 1 |
BONIN-FONT F, BURGUERA A, LISANI J L Visual discrimination and large area mapping of posidonia oceanica using a lightweight AUV. IEEE Access, 2017, 5, 24479- 24494.
doi: 10.1109/ACCESS.2017.2764998 |
| 2 | WEN J Y, WANG A Q, ZHU J W, et al Adaptive energy-efficient reinforcement learning for AUV 3D motion planning in complex underwater environments. Ocean Engineering, 2024, 312 (2): 119111- 119122. |
| 3 |
SEE V B T, GREINERT J, MEURER T Detection and tracking of ocean layers using an AUV with UKF based extremum seeking control in the Baltic Sea. Scientific Reports, 2024, 14 (1): 20629- 20640.
doi: 10.1038/s41598-024-70775-y |
| 4 | ZHU J Y, GAO M. AUV path planning based on particle swarm optimization and improved ant colony optimization. Computer Engineering and Applications, 2021, 57(6): 267−273. |
| 5 |
CHEN J X, LIU X Q, WU C, et al An ant colony path planning optimization based on opposition-based learning for AUV in irregular regions. Computing, 2024, 106 (7): 2489- 2520.
doi: 10.1007/s00607-024-01293-y |
| 6 | ZHANG W, WANG N X, WU W H A hybrid path planning algorithm considering AUV dynamic constraints based on improved A* algorithm and APF algorithm. Ocean Engineering, 2023, 285 (1): 115333- 115342. |
| 7 |
WU X L, ZHANG Q Y, BAI Z F, et al A self-adaptive safe A* algorithm for AGV in large-scale storage environment. Intelligent Service Robotics, 2024, 17 (2): 221- 235.
doi: 10.1007/s11370-023-00494-2 |
| 8 |
SUN B, ZHANG W, LI S Q, et al Energy optimized D* AUV path planning with obstacle avoidance and ocean current environment. Journal of Navigation, 2022, 75 (3): 685- 703.
doi: 10.1017/S0373463322000091 |
| 9 |
IVAN M, MARIJA S, KRUNO L, et al Path planning for active SLAM based on the D* algorithm with negative edge weights. IEEE Trans. on Systems, Man, and Cybernetics: Systems, 2018, 48 (8): 1321- 1331.
doi: 10.1109/TSMC.2017.2668603 |
| 10 |
NYEONG S H, CHEN J H, LIAO Y C, et al Auto-splitting D* lite path planning for large disaster area. Intelligent Service Robotics, 2022, 15 (3): 289- 306.
doi: 10.1007/s11370-022-00416-8 |
| 11 |
YAO Y L, LIANG X F, LI M Z, et al Path planning method based on D* lite algorithm for unmanned surface vehicles in complex environments. China Ocean Engineering, 2021, 35 (3): 372- 383.
doi: 10.1007/s13344-021-0034-z |
| 12 |
CARRERAS M, HERNANDEZ J D, VIDAL E, et al Sparus II AUV-A hovering vehicle for seabed inspection. IEEE Journal of Oceanic Engineering, 2018, 43 (2): 344- 355.
doi: 10.1109/JOE.2018.2792278 |
| 13 |
YAO Z F, LIU Q Z, JU Y Z Improved artificial fish swarm based optimize rapidly-exploring random trees multi-robot exploration algorithm. Journal of Computational Methods in Sciences and Engineering, 2023, 23 (5): 2779- 2794.
doi: 10.3233/JCM-226866 |
| 14 |
LI X, LI G, BIAN Z J Research on autonomous vehicle path planning algorithm based on improved RRT* algorithm and artificial potential field method. Sensors, 2024, 24 (12): 3899- 3929.
doi: 10.3390/s24123899 |
| 15 | TANG X X, ZHOU H B, XU T Y Obstacle avoidance path planning of 6-DOF robotic arm based on improved A* algorithm and artificial potential field method. Robotica, 2023, 42 (2): 457- 481. |
| 16 |
MELO D W, JORGE D, MARQUES V Low-cost thermal explorer robot using a hybrid neural networks and intelligent bug algorithm model. International Journal of Computer Applications in Technology, 2021, 65 (3): 245- 252.
doi: 10.1504/IJCAT.2021.116013 |
| 17 | NELOYI A M, BARUA V, DAS M, et al An intelligent obstacle and edge recognition system using bug algorithm. American Scientific Research Journal for Engineering, Technology, and Sciences (ASRJETS), 2020, 64 (1): 133- 143. |
| 18 | LI Y J, WU Y, ZHANG G A real-time path planning algorithm for AUV in unknown underwater environment based on combining PSO and waypoint guidance. Sensors, 2019, 19 (1): 20- 34. |
| 19 |
ABOLFAZL S M FOPID Control of quadrotor based on neural networks optimization and path planning through machine learning and PSO algorithm. International Journal of Aeronautical and Space Sciences, 2022, 23 (3): 567- 582.
doi: 10.1007/s42405-022-00461-8 |
| 20 | ZHAO R, XU J, WANG M, et al Heading control of AUV based on GA and fractional order technology. Chinese Journal of Ship Research, 2018, 13 (6): 87- 93. |
| 21 | ZHANG S C, PU J X, SI Y N, et al Survey on application of ant colony algorithm in path planning of mobile robot. Computer Engineering and Application, 2020, 56 (8): 10- 19. |
| 22 |
HUANG Y J, LI Y B, ZHANG Z T, et al A novel path planning approach for AUV based on improved whale optimization algorithm using segment learning and adaptive operator selection. Ocean Engineering, 2023, 280 (13): 114591- 114604.
doi: 10.1016/j.oceaneng.2023.114591 |
| 23 | WANG X W, YAO X L, ZHANG L Path planning under constraints and path following control of autonomous underwater vehicle with dynamical uncertainties and wave disturbances. Journal of Intelligent & Robotic Systems, 2020, 99 (15): 891- 908. |
| 24 |
RAVANKAR A, RAVANKAR A A, KOBAYASHI Y, et al Path smoothing techniques in robot navigation: state of theart current and future challenges. Sensors, 2018, 18 (9): 3170- 3199.
doi: 10.3390/s18093170 |
| 25 | LIU L, WANG D, PENG Z H Path following of marine surface vehicles with dynamical uncertainty and time-varying ocean disturbances. Neurocomputing, 2016, 173 (25): 799- 808. |
| 26 |
LEKKAS A M, FOSSEN T I Integral LOS path following for curved paths based on a monotone cubic Hermite spline Parametrization. IEEE Trans. on Control Systems Technology, 2014, 22 (6): 2287- 2301.
doi: 10.1109/TCST.2014.2306774 |
| 27 | ATAEI M, KOMA A Y Three-dimensional optimal path planning for waypoint guidance of an autonomous underwater vehicle. Robotics and Autonomous Systems, 2015, 67 (17): 23- 32. |
| 28 |
HADSELL R Space-carving kernels for accurate rough terrain estimation. The International Journal of Robotics Research, 2010, 29 (8): 981- 996.
doi: 10.1177/0278364910369996 |
| 29 | WANG C, DU W, LI C H, et al Numerical simulation of influence of ocean internal waves on hydrodynamic characteristics of underwater vehicles. Chinese Journal of Ship Research, 2022, 17 (3): 102- 111. |
| 30 | CHENG L, DU P, WANG C, et al Tuning control parameters of underwater vehicle to minimize the influence of internal solitary waves. Ocean Engineering, 2024, 310 (1): 118681- 118705. |
| 31 |
MENG R H, CHENG X H, WU Z J, et al Improved ant colony optimization for safe path planning of AUV. Heliyon, 2024, 10 (7): 27753- 27766.
doi: 10.1016/j.heliyon.2024.e27753 |
| [1] | Gang LIU, Xinyuan GUO, Dong HUANG, Kezhong CHEN, Wu LI. Multi-platform collaborative MRC-PSO algorithm for anti-ship missile path planning [J]. Journal of Systems Engineering and Electronics, 2025, 36(2): 494-509. |
| [2] | Yao XING, Jiongqi WANG, Zhangming HE, Xuanying ZHOU, Yuyun CHEN, Xiaogang PAN. TOA positioning algorithm of LBL system for underwater target based on PSO [J]. Journal of Systems Engineering and Electronics, 2023, 34(5): 1319-1332. |
| [3] | Jun CHEN, Xudong GAO, Jia RONG, Xiaoguang GAO. A situation awareness assessment method based on fuzzy cognitive maps [J]. Journal of Systems Engineering and Electronics, 2022, 33(5): 1108-1122. |
| [4] | Bing WANG, Pengfei ZHANG, Yufeng HE, Xiaozhi WANG, Xianxia ZHANG. Scenario-oriented hybrid particle swarm optimization algorithm for robust economic dispatch of power system with wind power [J]. Journal of Systems Engineering and Electronics, 2022, 33(5): 1143-1150. |
| [5] | Jianwei SUN, Chao WANG, Qingzhan SHI, Wenbo REN, Zekun YAO, Naichang YUAN. Intelligent optimization methods of phase-modulation waveform [J]. Journal of Systems Engineering and Electronics, 2022, 33(4): 916-923. |
| [6] | Zihang DING, Junwei XIE, Zhengjie LI. Adaptive transmit beamspace optimization design based on RD-log-FDA radar [J]. Journal of Systems Engineering and Electronics, 2022, 33(1): 91-96. |
| [7] | Wanping SONG, Zengqiang CHEN, Mingwei SUN, Qinglin SUN. Reinforcement learning based parameter optimization of active disturbance rejection control for autonomous underwater vehicle [J]. Journal of Systems Engineering and Electronics, 2022, 33(1): 170-179. |
| [8] | Shiyun LI, Sheng ZHONG, Zhi PEI, Wenchao YI, Yong CHEN, Cheng WANG, Wenzhu ZHANG. Multi-objective reconfigurable production line scheduling for smart home appliances [J]. Journal of Systems Engineering and Electronics, 2021, 32(2): 297-317. |
| [9] | Yuxiao KANG, Shuhua MAO, Yonghong ZHANG, Huimin ZHU. Fractional derivative multivariable grey model for nonstationary sequence and its application [J]. Journal of Systems Engineering and Electronics, 2020, 31(5): 1009-1018. |
| [10] | Yu HUANG, Lihua WU, Qiang YU. Underwater square-root cubature attitude estimator by use of quaternion-vector switching and geomagnetic field tensor [J]. Journal of Systems Engineering and Electronics, 2020, 31(4): 804-814. |
| [11] | Hongzhi LI, Yong WANG. Particle swarm optimization for rigid body reconstruction after micro-Doppler removal in radar analysis [J]. Journal of Systems Engineering and Electronics, 2020, 31(3): 488-499. |
| [12] | Haowei ZHANG, Junwei XIE, Jiaang GE, Zhaojian ZHANG, Wenlong LU. Finite sensor selection algorithm in distributed MIMO radar for joint target tracking and detection [J]. Journal of Systems Engineering and Electronics, 2020, 31(2): 290-302. |
| [13] | Xu ZHENG, Yejun GAO, Wuxing JING, Yongsheng WANG. Multidisciplinary integrated design of long-range ballistic missile using PSO algorithm [J]. Journal of Systems Engineering and Electronics, 2020, 31(2): 335-349. |
| [14] | Mingnan TANG, Shijun CHEN, Xuehe ZHENG, Tianshu WANG, Hui CAO. Sensors deployment optimization in multi-dimensional space based on improved particle swarm optimization algorithm [J]. Journal of Systems Engineering and Electronics, 2018, 29(5): 969-982. |
| [15] | Hong Li, Mingyong Liu, and Kun Liu. Bio-inspired geomagnetic navigation method for autonomous underwater vehicle#br# [J]. Journal of Systems Engineering and Electronics, 2017, 28(6): 1203-1209. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||