
Journal of Systems Engineering and Electronics ›› 2025, Vol. 36 ›› Issue (4): 1068-1076.doi: 10.23919/JSEE.2025.000076
• CONTROL THEORY AND APPLICATION • Previous Articles
Jiacheng TANG( ), Zixiao YANG(), Lei ZHANG(), Tianjiang HU(), Bo ZHU()
), Zixiao YANG(), Lei ZHANG(), Tianjiang HU(), Bo ZHU()
Received:2024-03-01
Online:2025-08-18
Published:2025-09-04
Contact:
Bo ZHU
E-mail:tangjch5@mail2.sysu.edu.cn;yangzx53@mail2.sysu.edu.cn;zhanglei87@mail2.sysu.edu.cn;hutj3@mail.sysu.edu.cn;zhubo5@mail.sysu.edu.cn
About author:Supported by:Jiacheng TANG, Zixiao YANG, Lei ZHANG, Tianjiang HU, Bo ZHU. Regular virtual tube for cooperative transportation of a payload by multiple quadrotors[J]. Journal of Systems Engineering and Electronics, 2025, 36(4): 1068-1076.
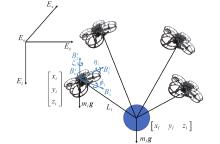
Fig 1
Four UAVs carrying a payload"
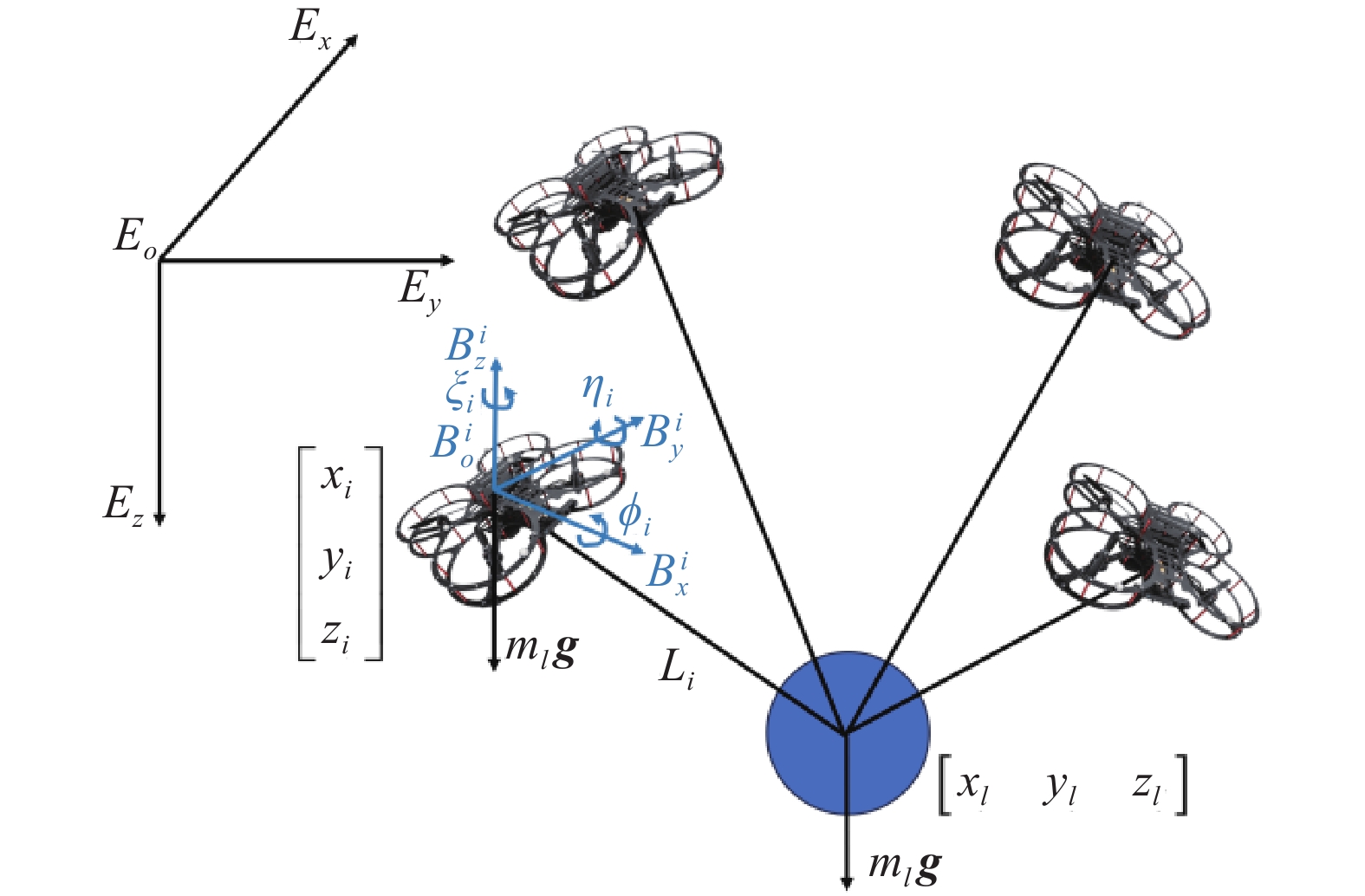

Fig 2
Front view of the payload’s swing motion"
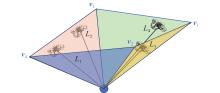
Fig 3
Boundary of the payload’s swing motion"
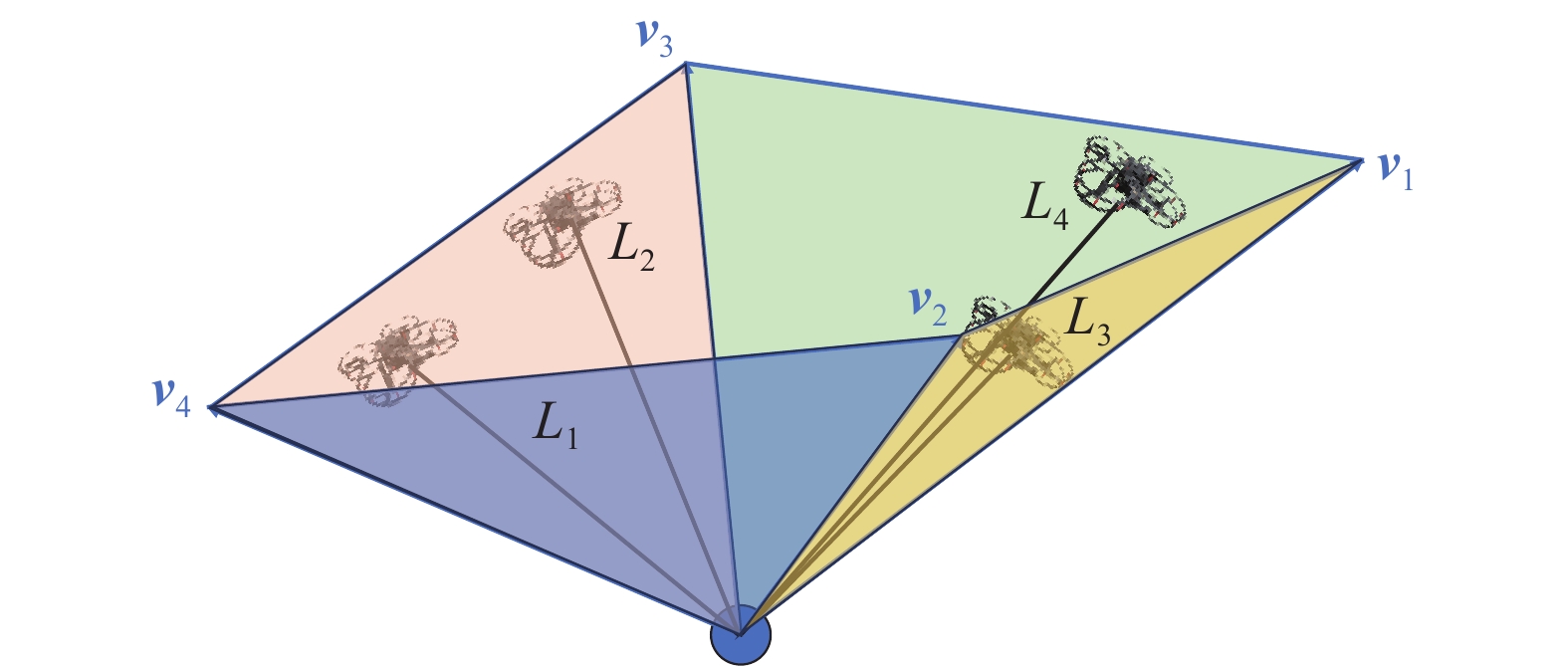

Fig 4
Safety area and avoidance area"
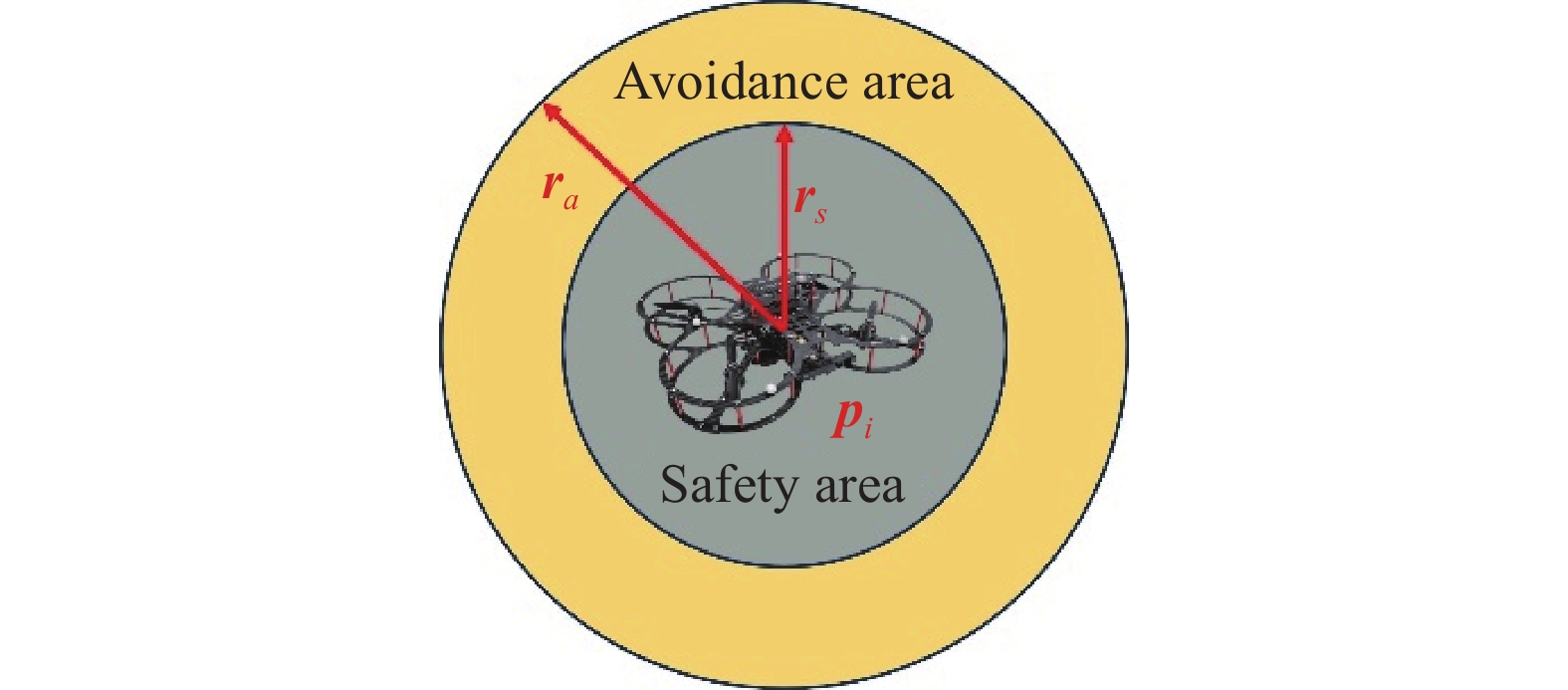
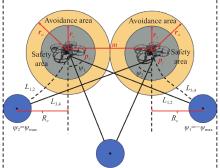
Fig 5
Critical point of the payload’s swing motion"
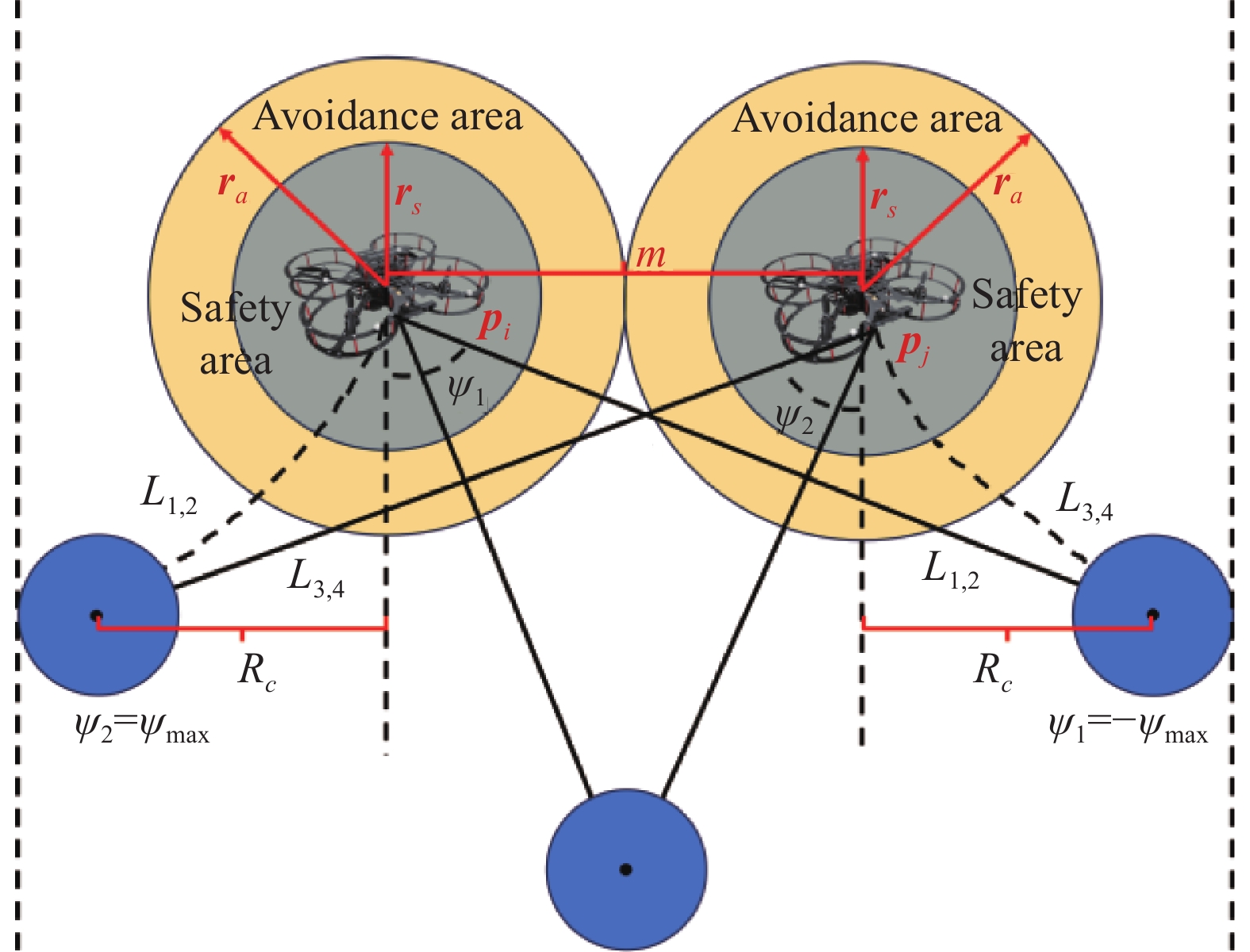
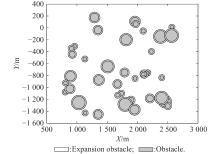
Fig 6
Obstacle-dense environment and expansion environment"
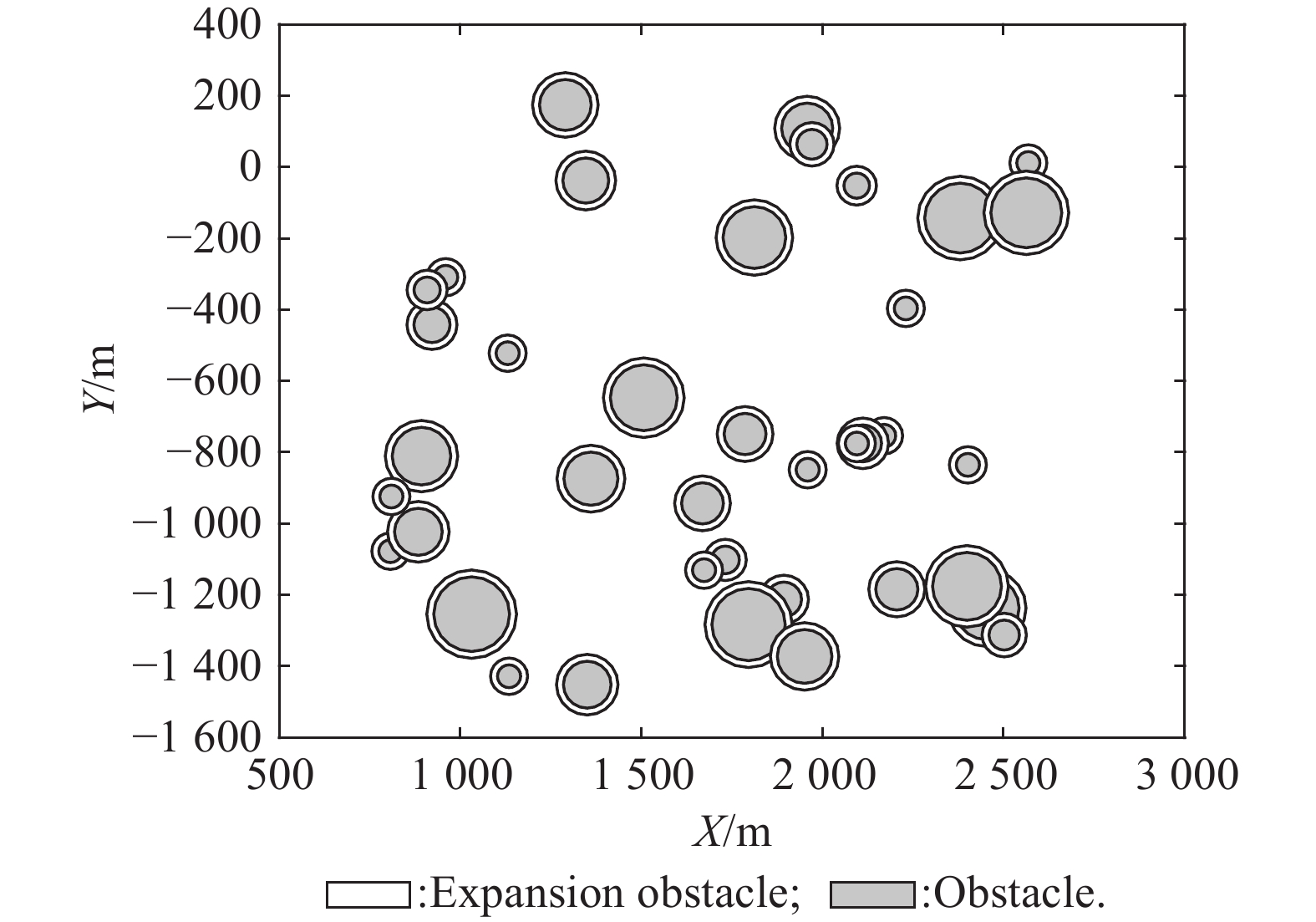
Fig 7
Multi-UAVs CTS passing through the RVT for obstacle avoidance"

Fig 8
Multi-UAVs CTS passing through the RVT-EE for obstacle avoidance"
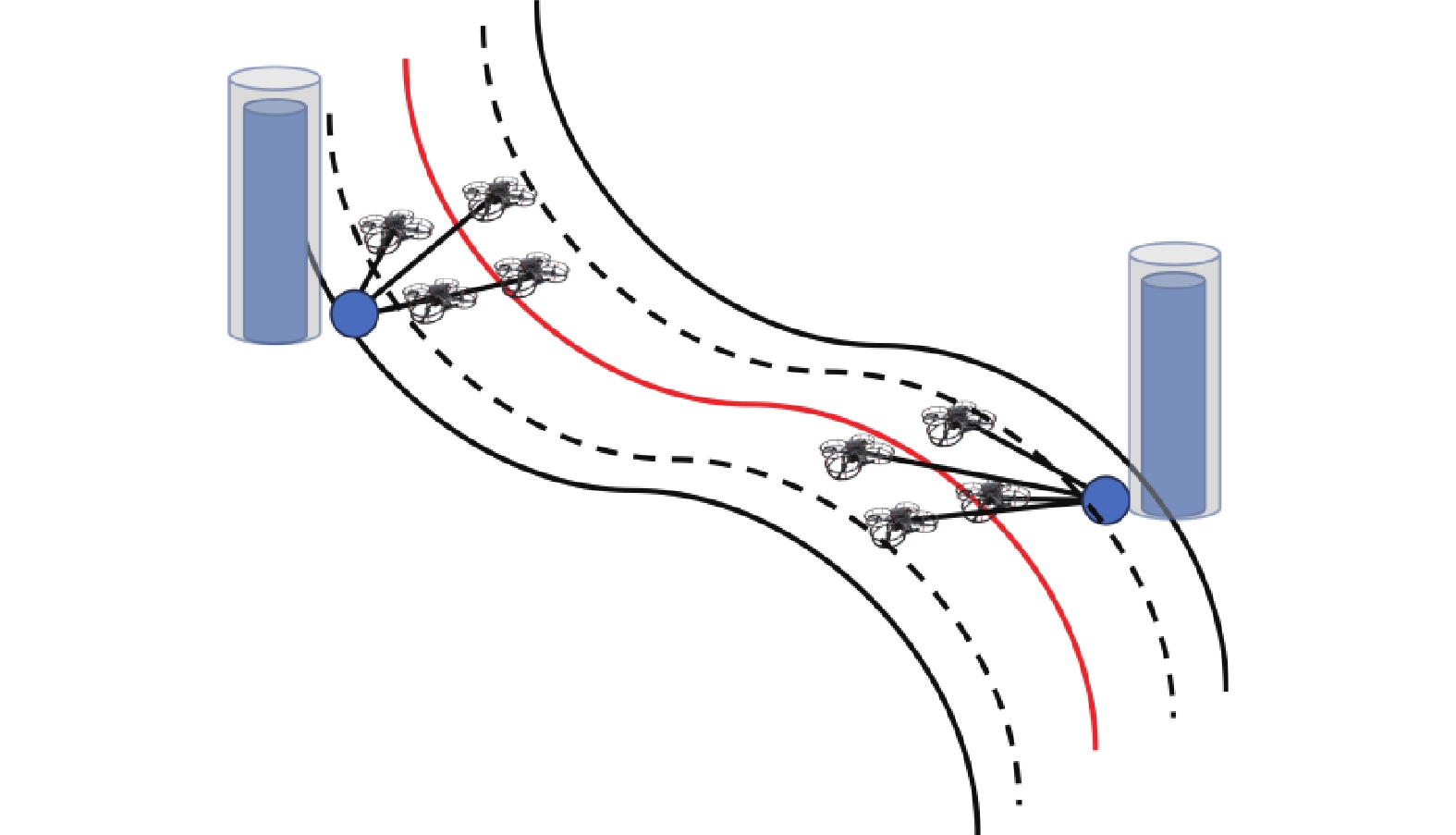
Fig 9
Virtual tube in an obstacle-dense environment"
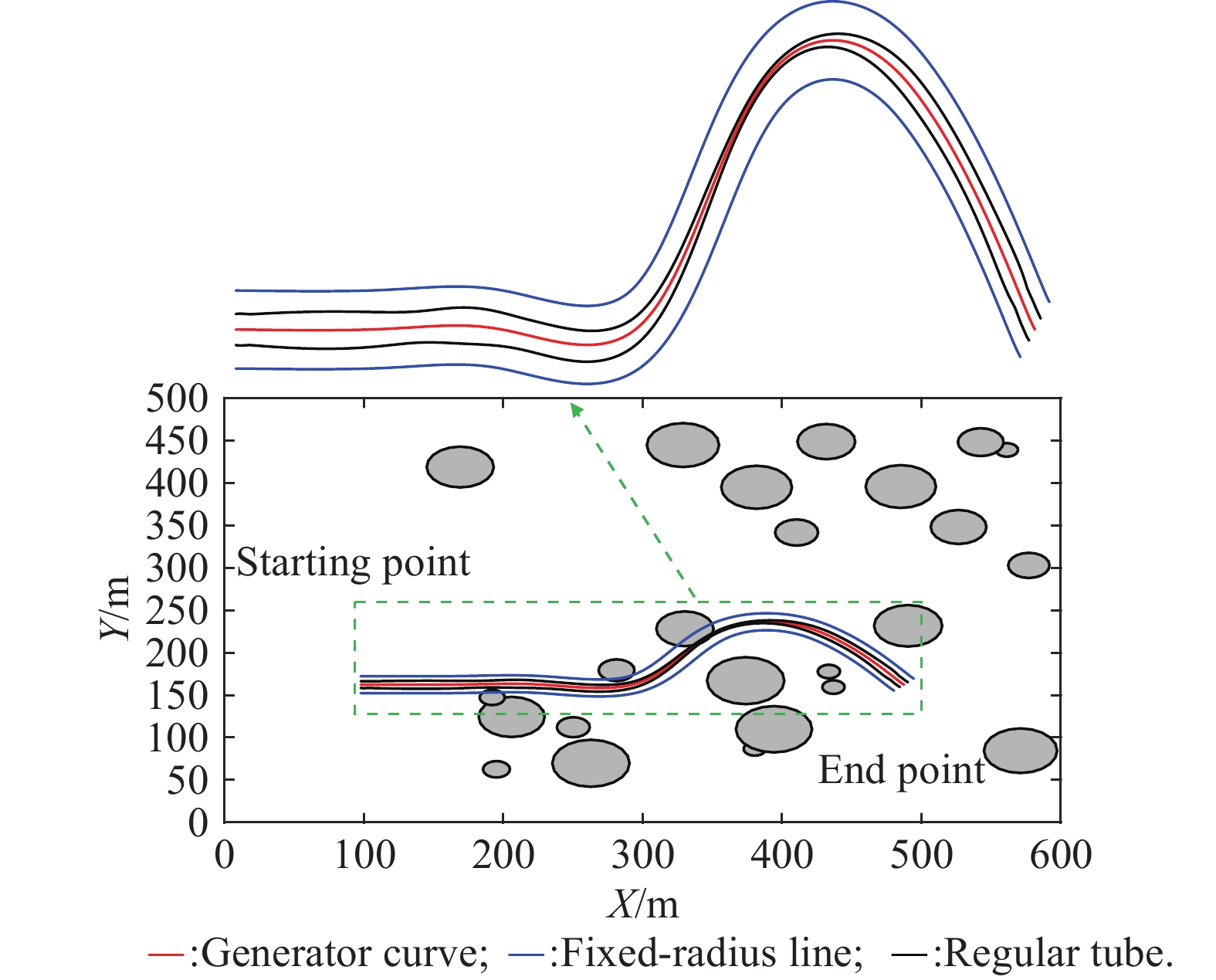
Fig 10
Virtual tube in an expansion environment"
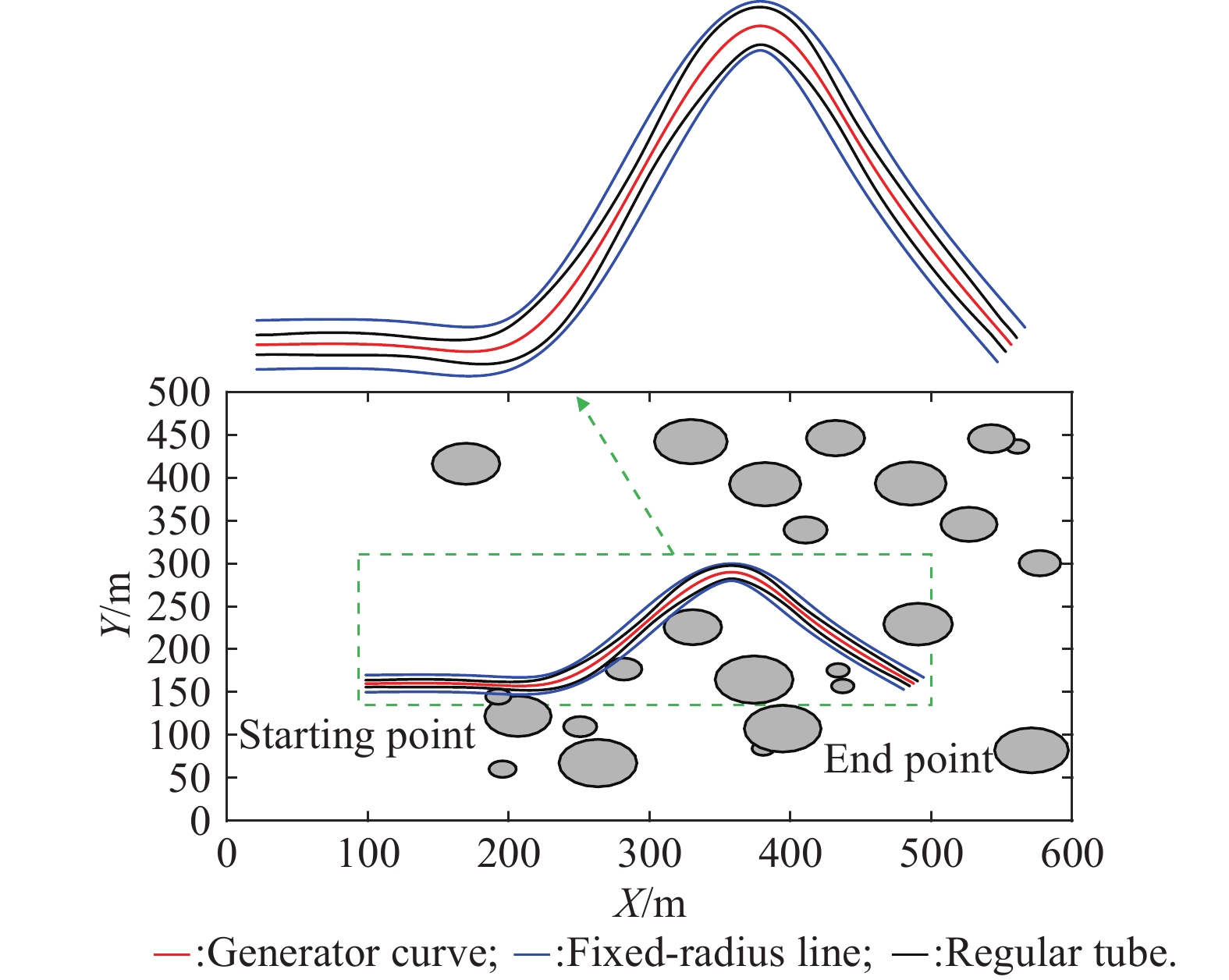
Fig 11
Simulation of multi-UAVs CTS to pass through an obstacle-dense environment"
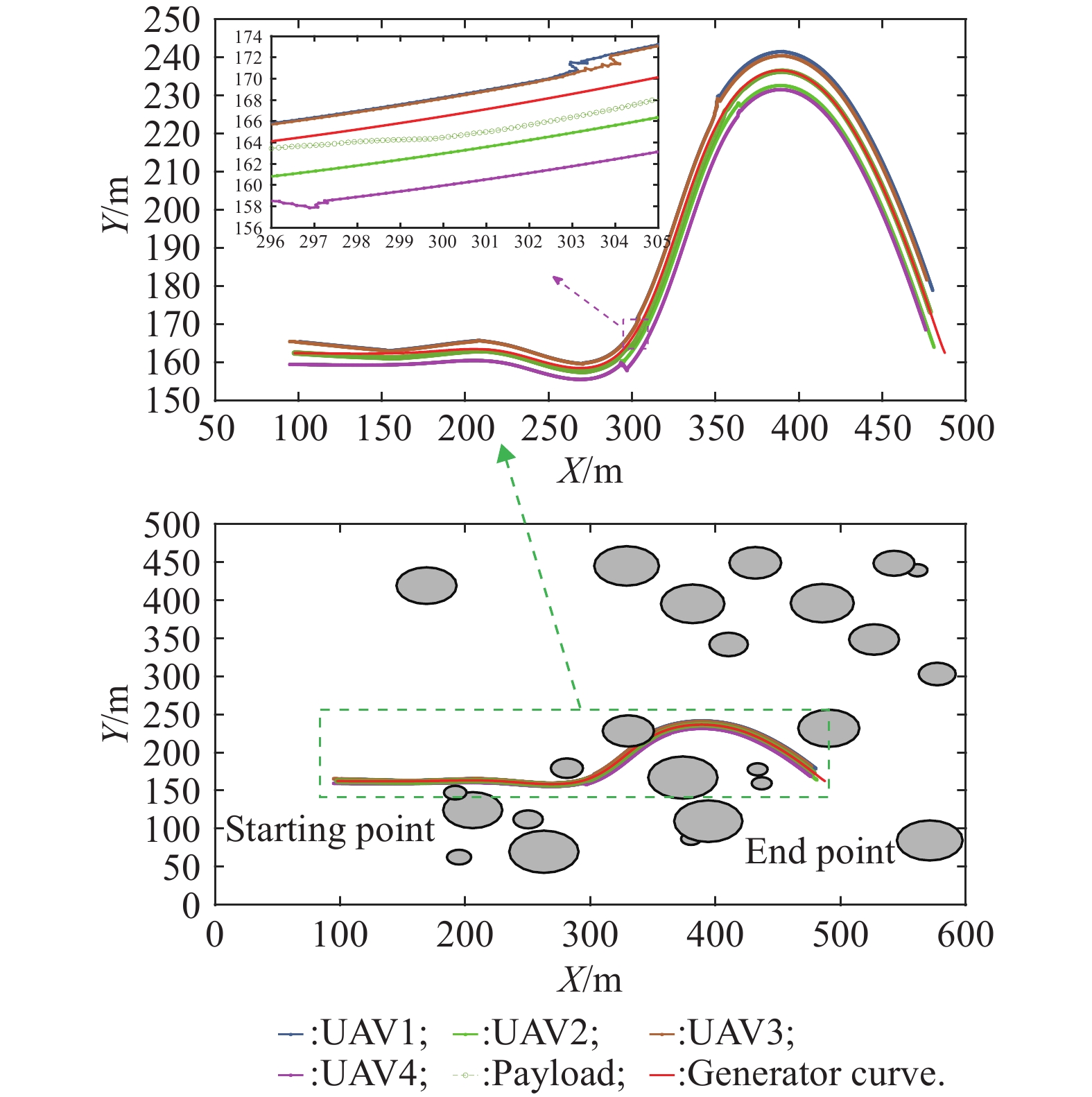

Fig 12
Simulation of multi-UAVs CTS to pass through the traditional RVT"
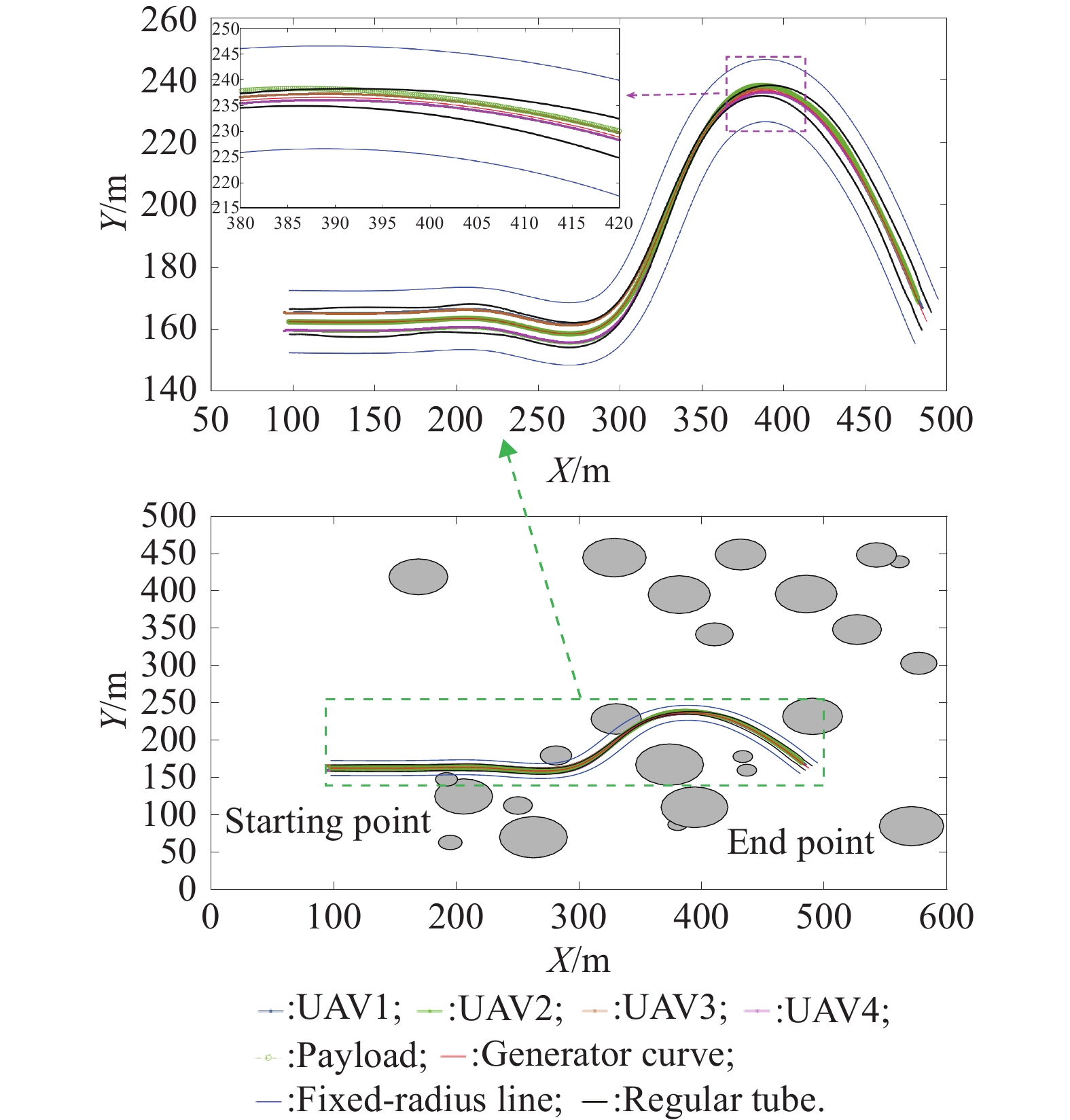

Fig 13
Simulation of multi-UAVs CTS to pass through the RVT-EE"
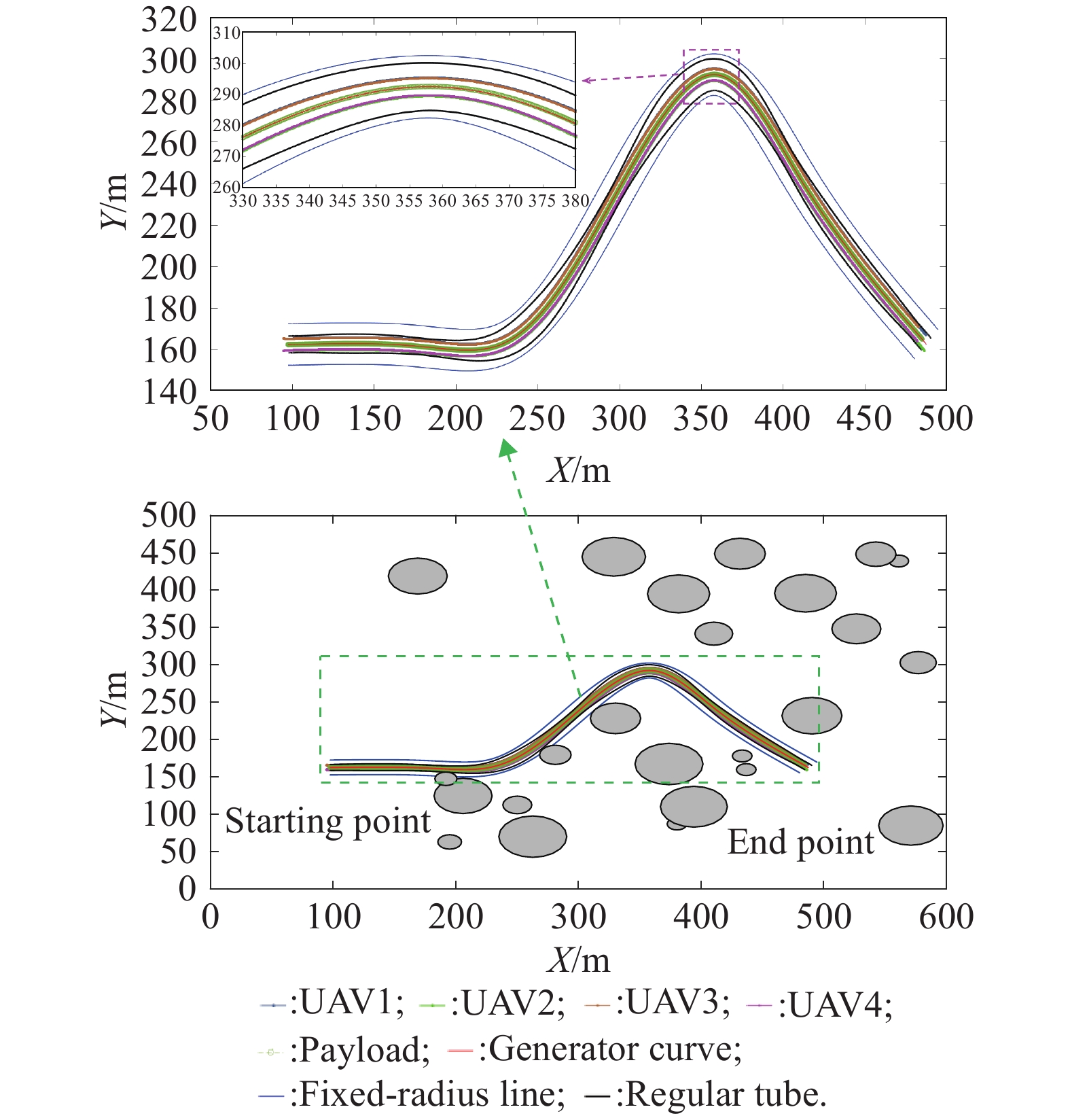
Table 1
Parameters of algorithms"
| Parameter | Value |
| 10 | |
| 0.4 | |
| 0.2 | |
| 10 | |
| 150 | |
| 200 |
Table 2
Simulation results of different algorithms"
| Tube model | ||||||||
| NC | AD | NC | AD | NC | AD | |||
| A* | 0 | 26.66 | 0 | 25.08 | 47 | 25.29 | ||
| RVT | 315 | 25.51 | 156 | 25.36 | 79 | 25.33 | ||
| RVT-EE | 0 | 30.80 | 0 | 31.12 | 0 | 30.89 | ||
| 1 |
YU W, ZHU B, WANG X H, et al Enhanced affine formation maneuver control using historical velocity command (HVC). IEEE Robotics and Automation Letters, 2023, 8 (11): 7186- 7193.
doi: 10.1109/LRA.2023.3316079 |
| 2 |
YU W, YI P, ZHU B, et al Enhanced affine formation maneuver control using historical acceleration command. International Journal of Robust and Nonlinear Control, 2023, 33 (18): 11458- 11480.
doi: 10.1002/rnc.6953 |
| 3 |
WANG F K, HUANG J L, LOW K H, et al AGDS: adaptive goal-directed strategy for swarm drones flying through unknown environments. Complex and Intelligent Systems, 2023, 9 (2): 2065- 2080.
doi: 10.1007/s40747-022-00900-9 |
| 4 | KE C X, CAI K Y, QUAN Q Analysis of a uniform passive fault-tolerant control method for multicopters. Journal of Systems Engineering and Electronics, 2024, 35 (6): 1574- 1582. |
| 5 |
MAO P D, FU R, QUAN Q Optimal virtual tube planning and control for swarm robotics. The International Journal of Robotics Research, 2024, 43 (5): 602- 627.
doi: 10.1177/02783649231210012 |
| 6 |
QUAN Q, GAO Y, BAI C G Distributed control for a robotic swarm to pass through a curve virtual tube. Robotics and Autonomous Systems, 2023, 162, 104368.
doi: 10.1016/j.robot.2023.104368 |
| 7 | HAO N D, MOHAMED B, RAFARALAHY H, et al. Formation of leader follower quadrotors in cluttered environment. Proc. of the American Control Conference, 2016: 6477−6482. |
| 8 | GAO Y, BAI C G, QUAN Q Distributed control for a multiagent system to pass through a connected quadrangle virtual tube. IEEE Trans. on Control of Network Systems, 2022, 10 (2): 693- 705. |
| 9 |
WANG X Y, SUN S J, XIAO F, et al Dynamic event-triggered formation control of second-order nonholonomic systems. Journal of Systems Engineering and Electronics, 2023, 34 (2): 501- 514.
doi: 10.23919/JSEE.2023.000049 |
| 10 |
QUAN L, YIN L J, ZHANG T R, et al Robust and efficient trajectory planning for formation flight in dense environments. IEEE Trans. on Robotics, 2023, 39 (6): 4785- 4804.
doi: 10.1109/TRO.2023.3301295 |
| 11 |
LUIS C E, SCHOELLIG A P Trajectory generation for multiagent point-to-point transitions via distributed model predictive control. IEEE Robotics and Automation Letters, 2019, 4 (2): 375- 382.
doi: 10.1109/LRA.2018.2890572 |
| 12 | PARK J, KIM J, JANG I, et al. Efficient multi-agent trajectory planning with feasibility guarantee using relative bernstein polynomial. Proc. of the IEEE International Conference on Robotics and Automation, 2020: 434−440. |
| 13 |
GKOULETSOS D, IANNELLI A, HUDOBA D B M, et al Decentralized trajectory optimization for multi-agent ergodic exploration. IEEE Robotics and Automation Letters, 2021, 6 (4): 6329- 6336.
doi: 10.1109/LRA.2021.3094242 |
| 14 | ZHOU X, ZHU J C, ZHOU H Y, et al. Ego-swarm: a fully autonomous and decentralized quadrotor swarm system in cluttered environments. Proc. of the IEEE International Conference on Robotics and Automation, 2021: 4101−4107. |
| 15 |
MADRIDANO A, AL-KAFF A, MARTÍN D, et al Trajectory planning for multi-robot systems: methods and applications. Expert Systems with Applications, 2021, 173, 114660.
doi: 10.1016/j.eswa.2021.114660 |
| 16 |
HOU J L, ZHOU X, GAN Z X, et al Enhanced decentralized autonomous aerial robot teams with group planning. IEEE Robotics and Automation Letters, 2022, 7 (4): 9240- 9247.
doi: 10.1109/LRA.2022.3191037 |
| 17 | CHEN M, FRAZZOLI E, HSU D, et al. POMDP-lite for robust robot planning under uncertainty. Proc. of the IEEE International Conference on Robotics and Automation, 2016: 5427−5433. |
| 18 | WANG L, AMES A D, EGERSTEDT M Safety barrier certificates for collisions-free multirobot systems. IEEE Trans. on Robotics, 2017, 33 (3): 661- 674. |
| 19 | PAN Z H, ZHANG C X, XIA Y Q, et al An improved artificial potential field method for path planning and formation control of the multi-UAV systems. IEEE Trans. on Circuits and Systems II-Express Briefs, 2021, 69 (3): 1129- 1133. |
| 20 | QUAN Q, FU R, LI M X, et al Practical distributed control for VTOL UAVs to pass a virtual tube. IEEE Trans. on Intelligent Vehicles, 2021, 7 (2): 342- 353. |
| 21 | MAO P D, QUAN Q. Making robotics swarm flow more smoothly: a regular virtual tube model. Proc. of the IEEE/RSJ International Conference on Intelligent Robots and Systems, 2022: 4498−4504. |
| 22 |
GAO Y, BAI C G, ZHANG L, et al Multi-UAV cooperative target encirclement within an annular virtual tube. Aerospace Science and Technology, 2022, 128, 107800.
doi: 10.1016/j.ast.2022.107800 |
| 23 |
YU X, ZHOU X B, ZHANG Y M Collision-free trajectory generation and tracking for UAVs using Markov decision process in a cluttered environment. Journal of Intelligent and Robotic Systems, 2019, 93 (1/2): 17- 32.
doi: 10.1007/s10846-018-0802-z |
| 24 | YU X, ZHOU X B, ZHANG Y M. Collision-free trajectory generation for UAVs using Markov decision process. Proc. of the International Conference on Unmanned Aircraft Systems, 2017: 56−61. |
| 25 |
WANG B, ZHANG Y M, ZHANG W Integrated path planning and trajectory tracking control for quadrotor UAVs with obstacle avoidance in the presence of environmental and systematic uncertainties: theory and experiment. Aerospace Science and Technology, 2022, 120, 107277.
doi: 10.1016/j.ast.2021.107277 |
| 26 | CEN H J, LI B, ACARMAN T, et al. Optimization-based maneuver planning for a tractor-trailer vehicle in complex environments using safe travel corridors. Proc. of the IEEE Intelligent Vehicles Symposium, 2021: 974−979. |
| 27 | LI R C, YANG Q K, ZHAO W P, et al. Collision-free trajectory generation for multiple UAVs with sensing constraints. Proc. of the 40th Chinese Control Conference, 2021: 5592−5597. |
| 28 | BOUABDALLAH S, MURRIERI P, SIEGWART R. Design and control of an indoor micro quadrotor. Proc. of the IEEE International Conference on Robotics and Automation, 2004: 4393−4398. |
| 29 |
LABBADI M, CHERKAOUI M Adaptive fractional-order nonsingular fast terminal sliding mode based robust tracking control of quadrotor UAV with Gaussian random disturbances and uncertainties. IEEE Trans. on Aerospace and Electronic Systems, 2021, 57 (4): 2265- 2277.
doi: 10.1109/TAES.2021.3053109 |
| 30 | DOAKHAN M, KABGANIAN M, AZIMI A. Robust adaptive control for formation-based cooperative transportation of a payload by multi quadrotors. European Journal of Control, 2023, 69: 100763. |
| 31 |
ZHANG Z, JIANG J, WU J, et al Efficient and optimal penetration path planning for stealth unmanned aerial vehicle using minimal radar cross-section tactics and modified A-Star algorithm. ISA Transactions, 2023, 134, 42- 57.
doi: 10.1016/j.isatra.2022.07.032 |
| 32 |
SUN N, FANG Y C, ZHANG Y D, et al A novel kinematic coupling-based trajectory planning method for overhead cranes. IEEE/ASME Trans. on Mechatronics, 2012, 17 (1): 166- 173.
doi: 10.1109/TMECH.2010.2103085 |
| 33 | SREENATH K, MICHAEL N, KUMAR V. Trajectory generation and control of a quadrotor with a cable-suspended load a differentially-flat hybrid system. Proc. of the IEEE International Conference on Robotics and Automation, 2013: 4888−4895. |
| 34 | SREENATH K, LEE T, KUMAR V. Geometric control and differential flatness of a quadrotor UAV with a cable-suspended load. Proc. of the IEEE Conference on Decision and Control, 2013: 2269−2274. |
| 35 |
SATHYAN A, MA O, COHEN K Genetic fuzzy methodology for decentralized cooperative UAVs to transport a shared payload. Drones, 2023, 7 (2): 103.
doi: 10.3390/drones7020103 |
| 36 |
JIANG Q M, KUMAR V Determination and stability analysis of equilibrium configurations of objects suspended from multiple aerial robots. Journal of Mechanisms and Robotics−Transactions of the ASME, 2012, 4 (2): 021005.
doi: 10.1115/1.4005588 |
| 37 |
JIANG Q M, KUMAR V The inverse kinematics of cooperative transport with multiple aerial robots. IEEE Trans. on Robotics, 2013, 29 (1): 136- 145.
doi: 10.1109/TRO.2012.2218991 |
| 38 | LI B, ACARMAN T, PENG X Y. Maneuver planning for automatic parking with safe travel corridors: a numerical optimal control approach. Proc. of the European Control Conference, 2020: 1993−1998. |
| [1] | Yan GAO, Chenggang BAI, Quan QUAN. A survey on passing-through control of multi-robot systems in cluttered environments [J]. Journal of Systems Engineering and Electronics, 2025, 36(4): 1037-1056. |
| [2] | Delong WU, Hao FANG, Yiren HAO, Aobo WANG. Outdoor navigation of millimeter-wave radar quadrotors based on optimal virtual tube [J]. Journal of Systems Engineering and Electronics, 2025, 36(4): 1057-1067. |
| [3] | Lu DONG, Zichen HE, Chunwei SONG, Changyin SUN. A review of mobile robot motion planning methods: from classical motion planning workflows to reinforcement learning-based architectures [J]. Journal of Systems Engineering and Electronics, 2023, 34(2): 439-459. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||