
Journal of Systems Engineering and Electronics ›› 2025, Vol. 36 ›› Issue (4): 1037-1056.doi: 10.23919/JSEE.2025.000095
• CONTROL THEORY AND APPLICATION • Previous Articles
Yan GAO1,2( ), Chenggang BAI1(), Quan QUAN1,*()
), Chenggang BAI1(), Quan QUAN1,*()
Received:2023-11-03
Online:2025-08-18
Published:2025-09-04
Contact:
Quan QUAN
E-mail:buaa_gaoyan@buaa.edu.cn;bcg@buaa.edu.cn;qq_buaa@buaa.edu.cn
About author:Yan GAO, Chenggang BAI, Quan QUAN. A survey on passing-through control of multi-robot systems in cluttered environments[J]. Journal of Systems Engineering and Electronics, 2025, 36(4): 1037-1056.

Fig 1
Fan-shaped detection area of a robot"
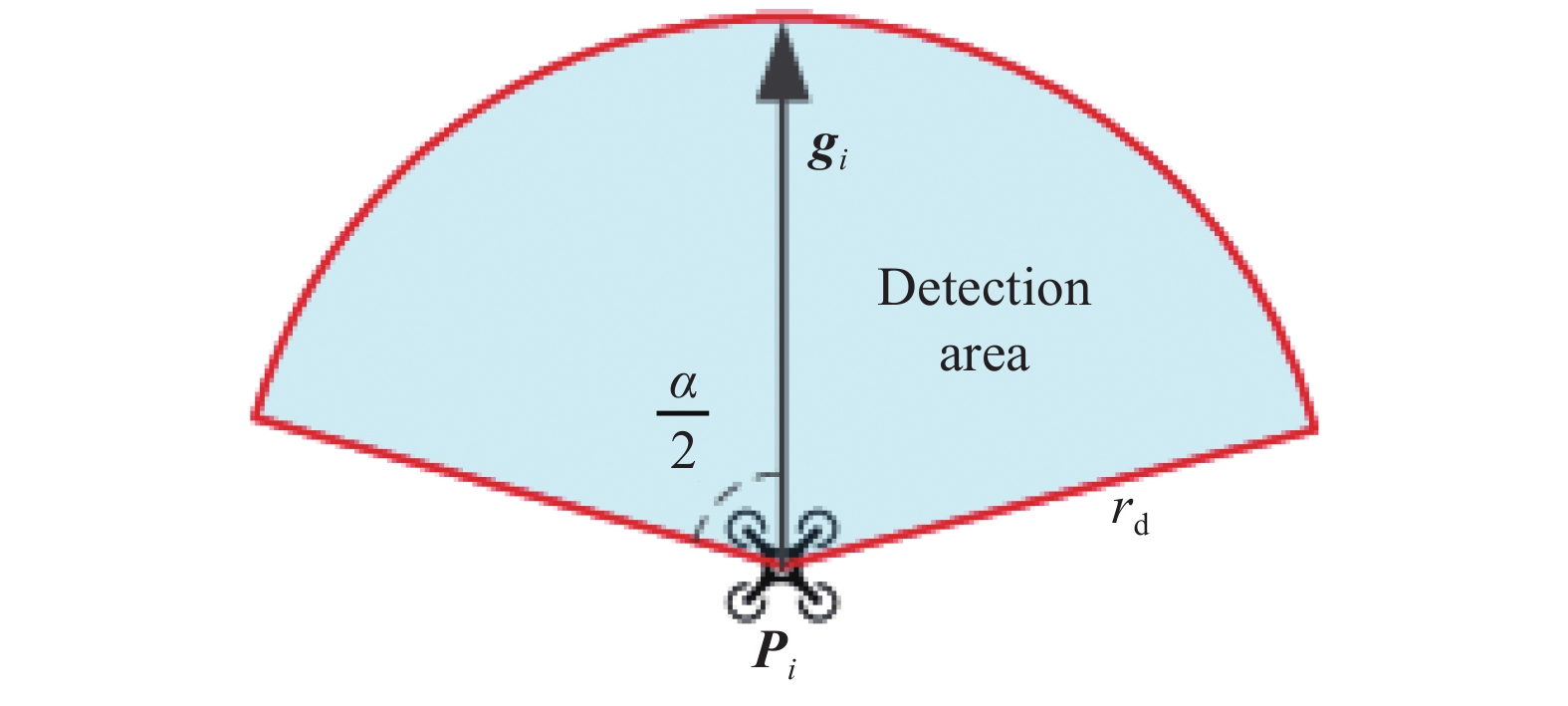
Table 1
Comparison of algorithms for passing through cluttered environments"
| Algorithm | Algorithm classification | Computation demand | Communication demand | Number of supported robots | Theoretical completeness |
| Formation control | − | -- | + | ○ | ++ |
| Multi-robot trajectory planning | Centralized | ++ | ++ | -- | ○ |
| Distributed | + | ++ | - | ○ | |
| Control-based method | Flocking control | -- | - | ++ | ○ |
| Vector field control | -- | - | ++ | ++ | |
| Centralized CBF | + | ○ | - | + | |
| Distributed CBF | ○ | - | ++ | + | |
| Virtual tube planning and control | − | -- | - | ++ | ++ |

Fig 2
Simulation of affine formation maneuver control"
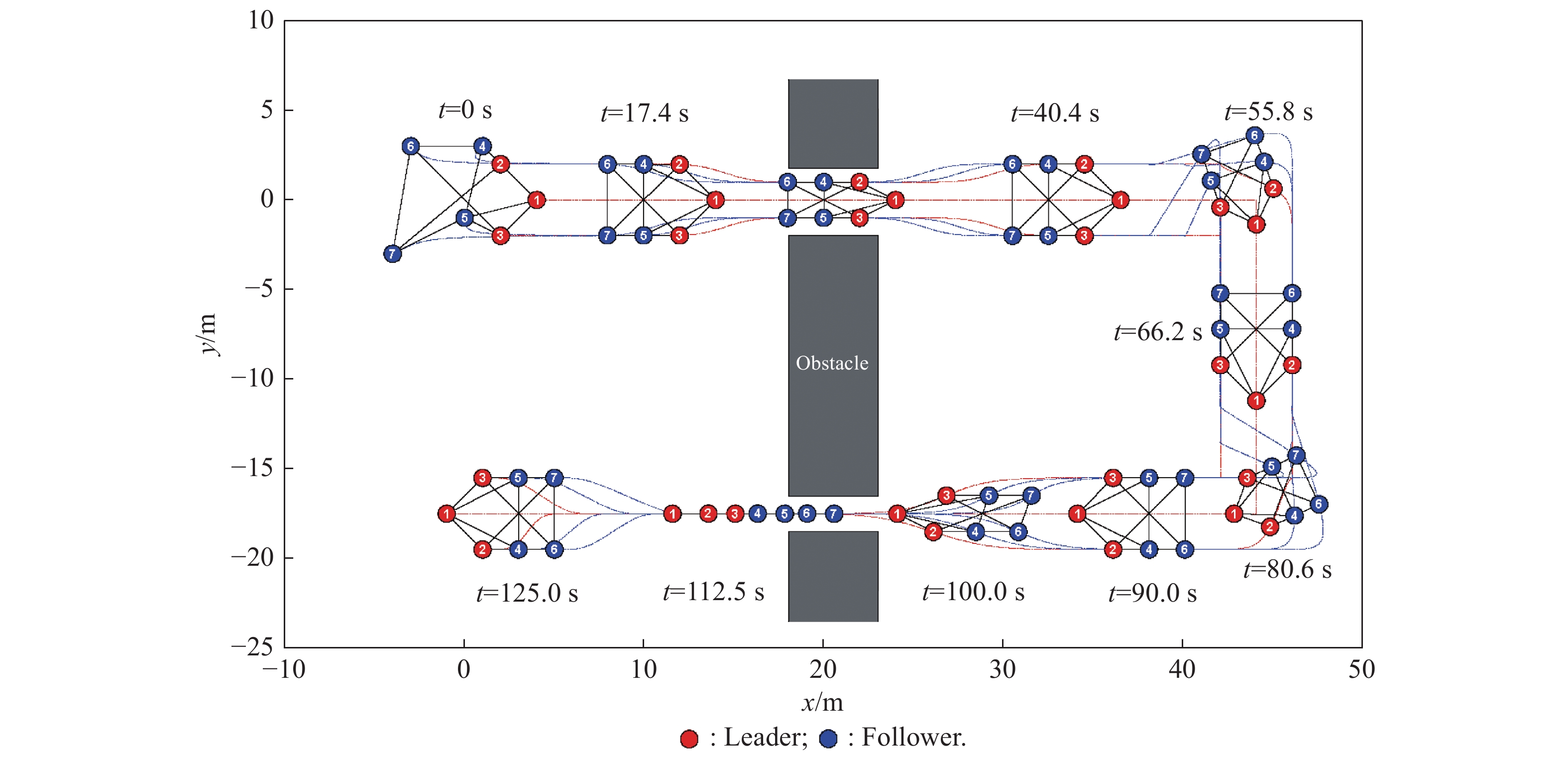

Fig 3
Experiment based on the minimum snap algorithm"
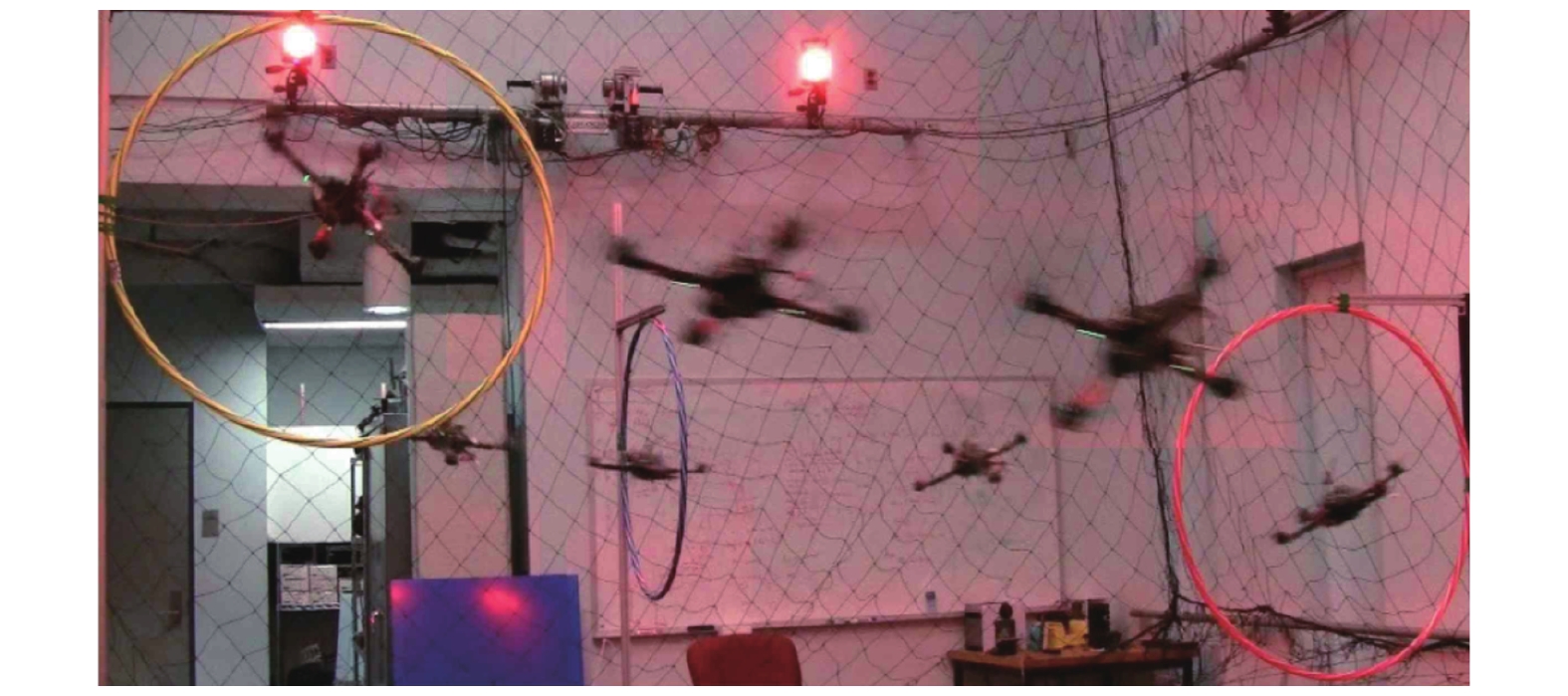
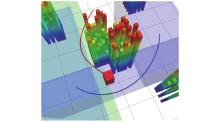
Fig 4
Trajectory planning for multiple robots using safe flight corridor and relative safe flight corridor"
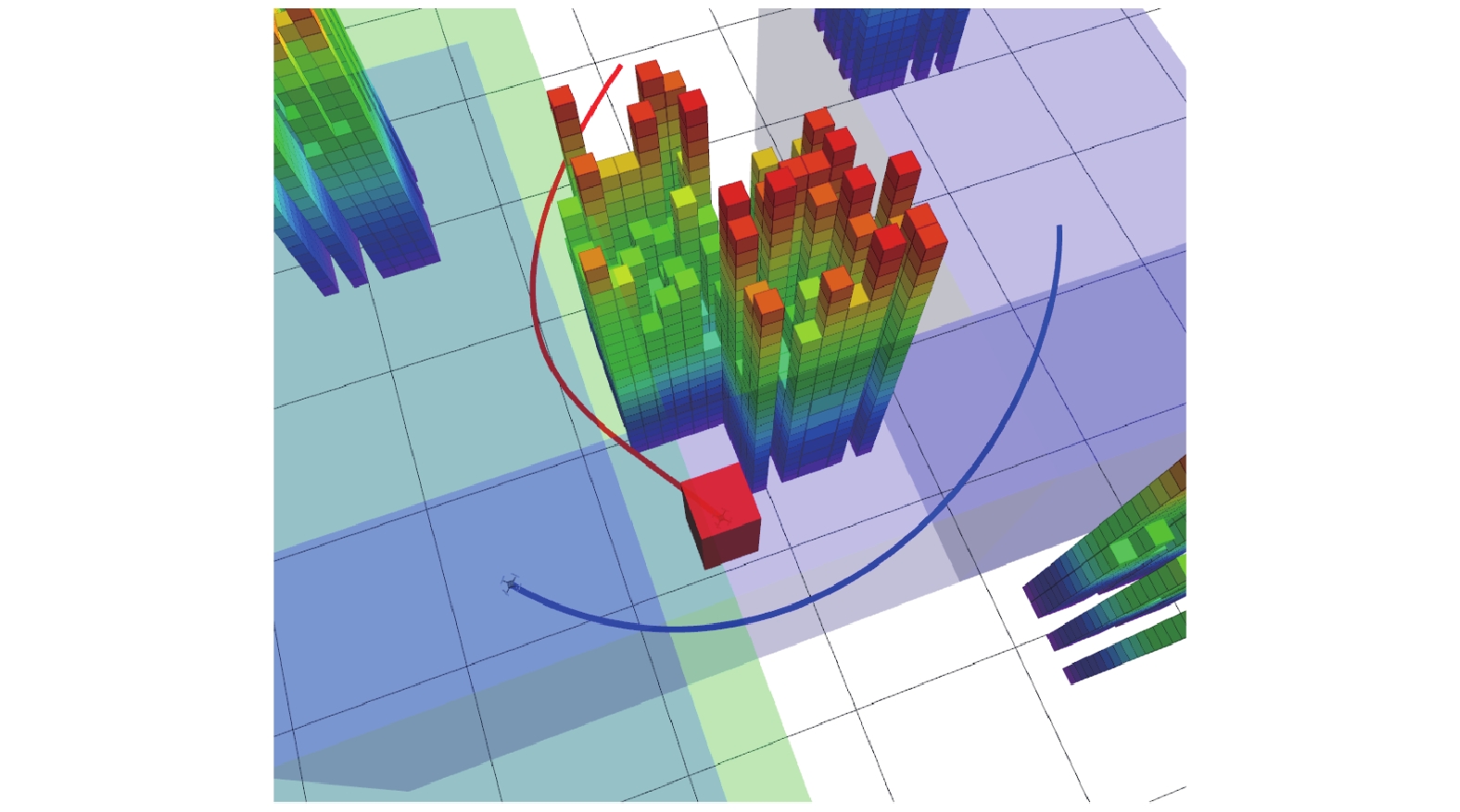
Fig 5
Typical non-gradient vector field"
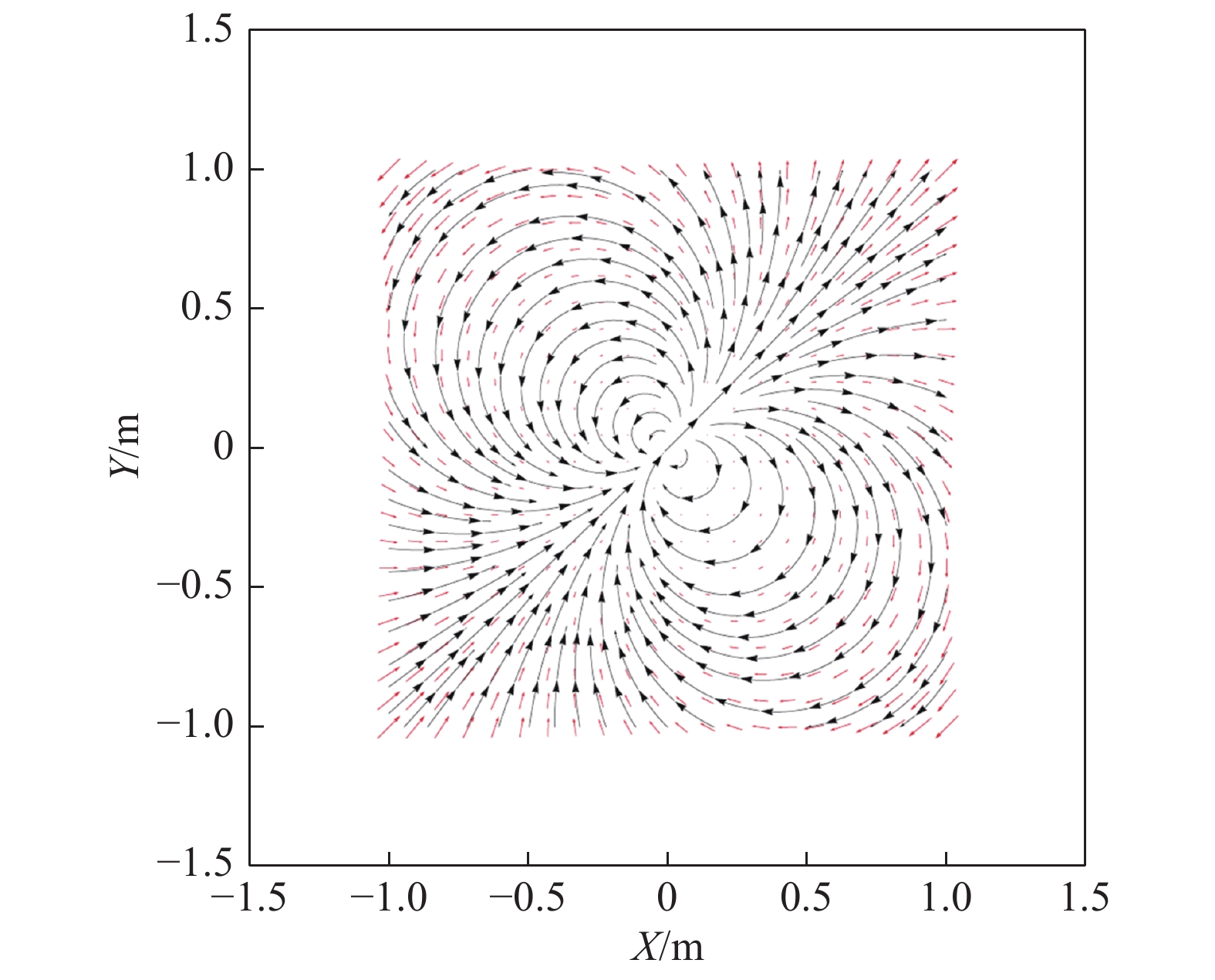
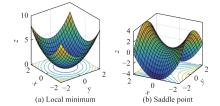
Fig 6
Comparison of local minimum and saddle point"
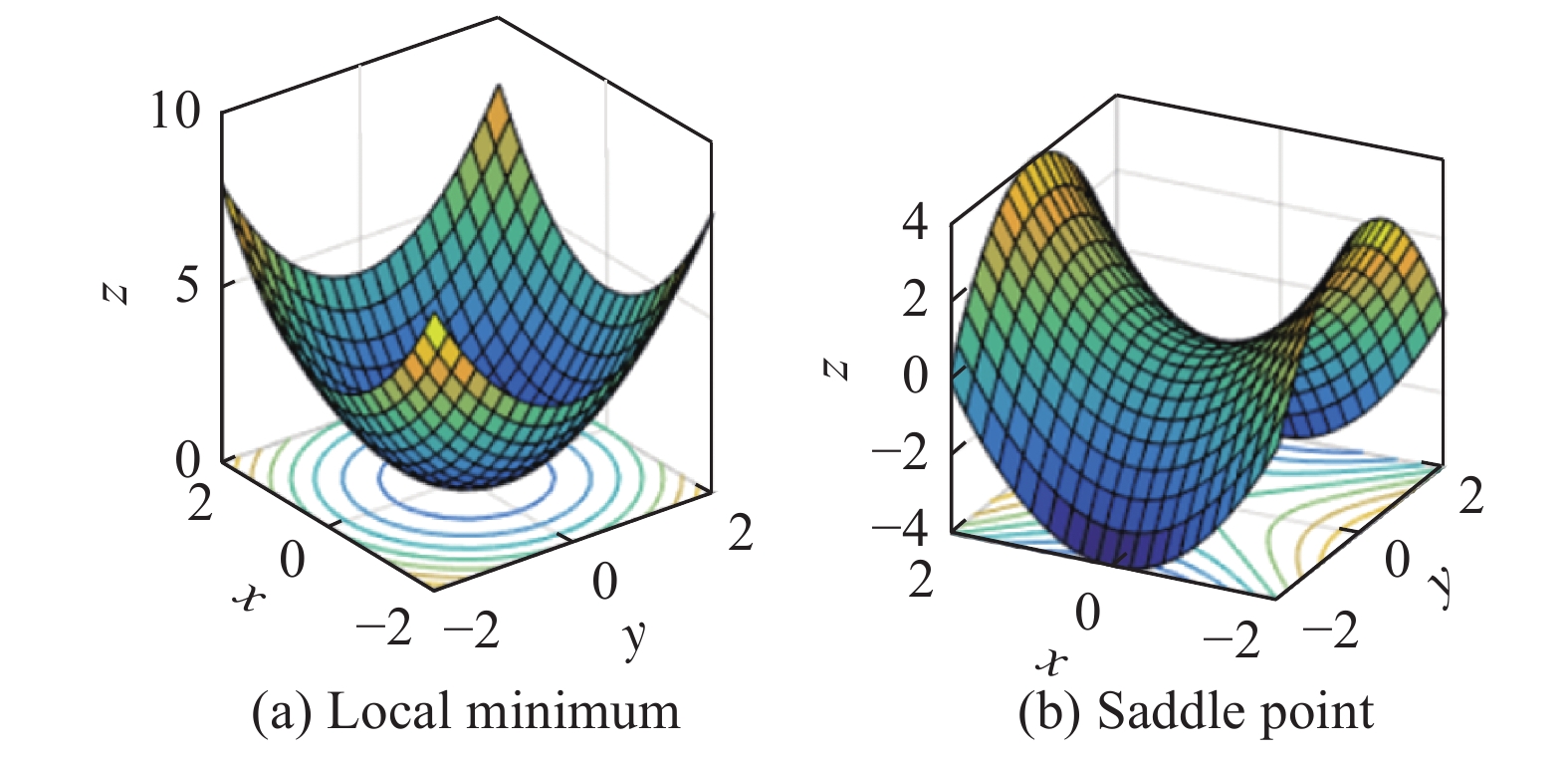
Fig 7
Vector field and flight trajectory generated by the LGVF method"
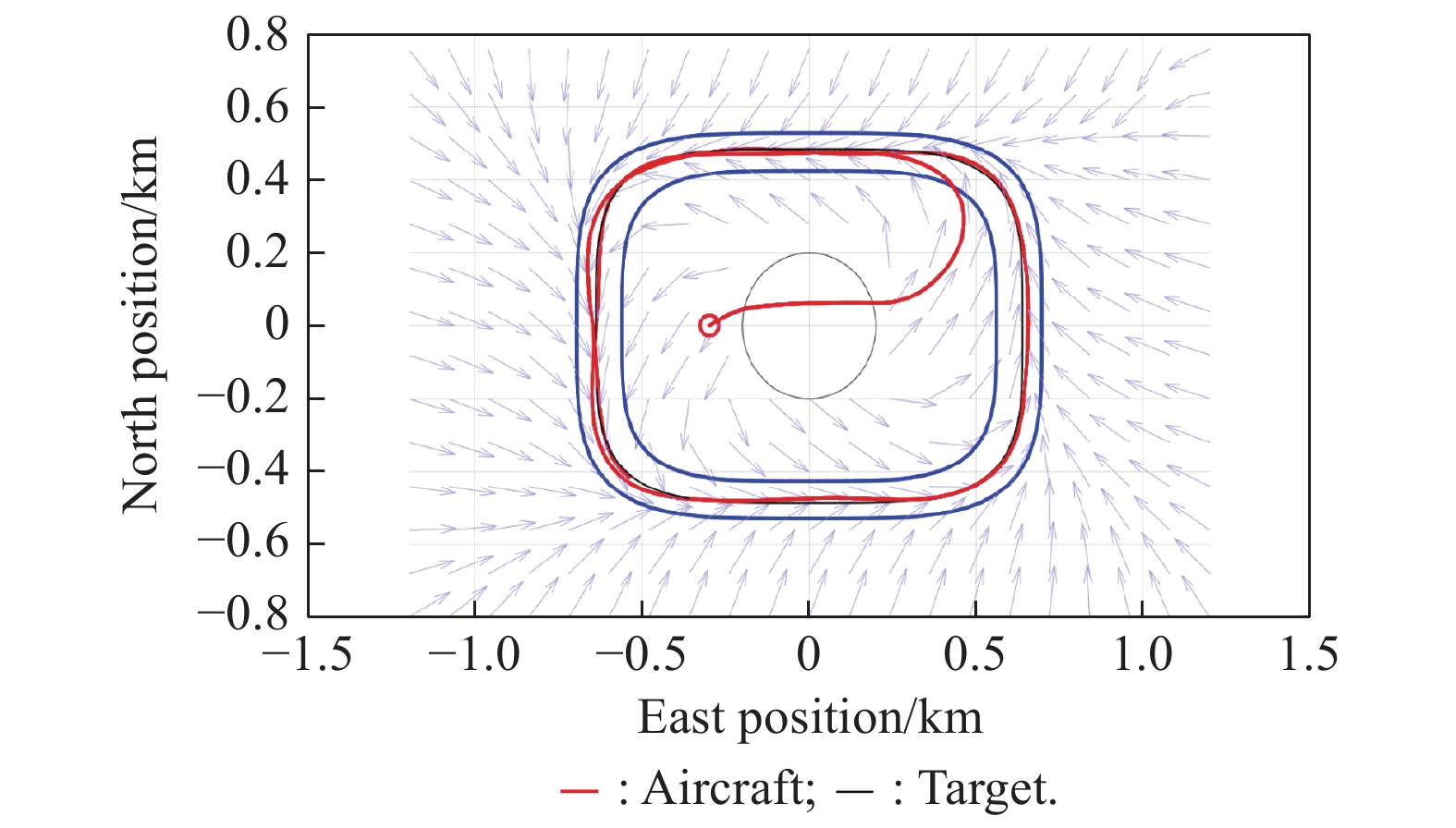
Fig 8
Road map of the virtual tube planning and control"
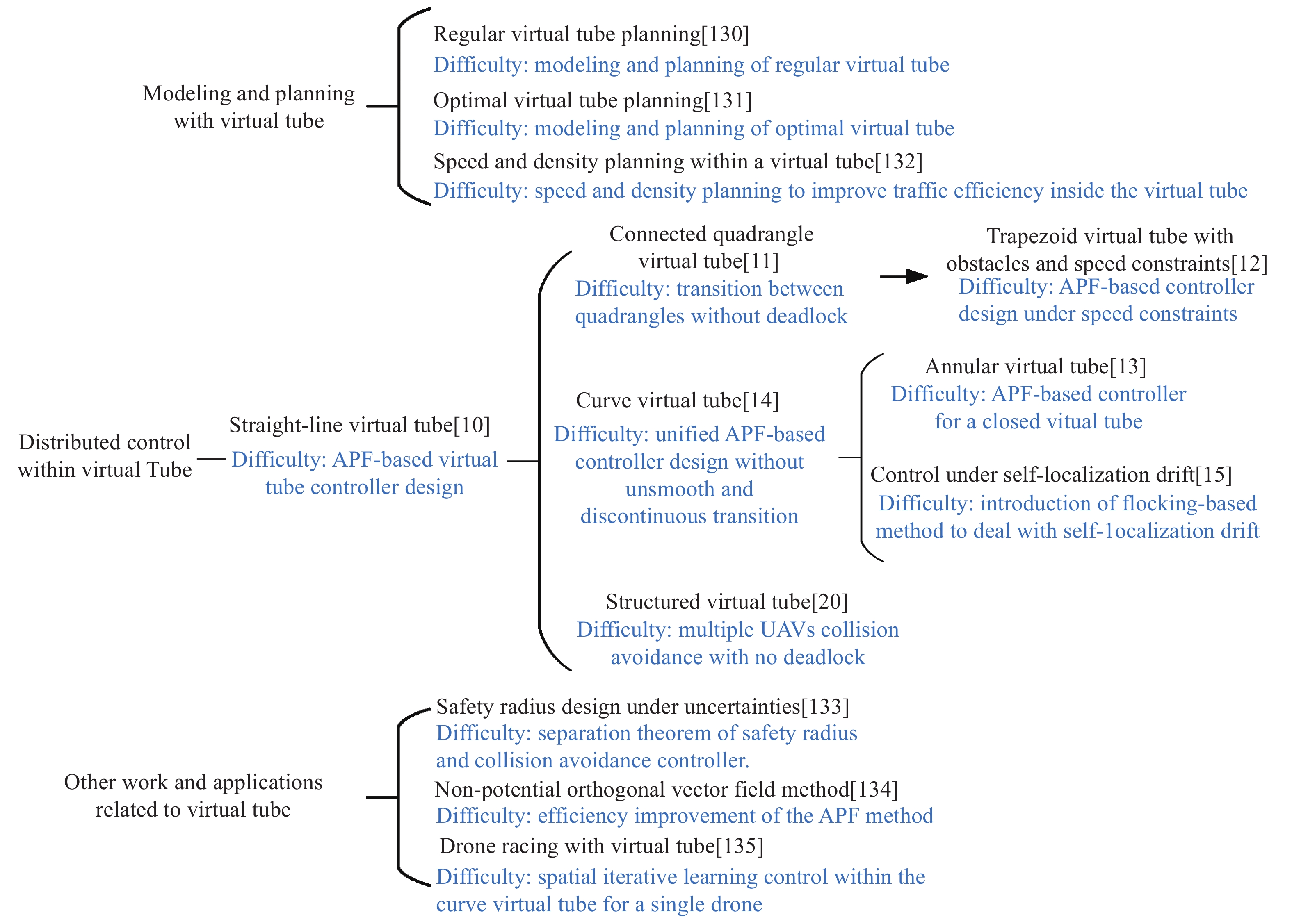
Fig 9
A regular virtual tube in three-dimensional space"
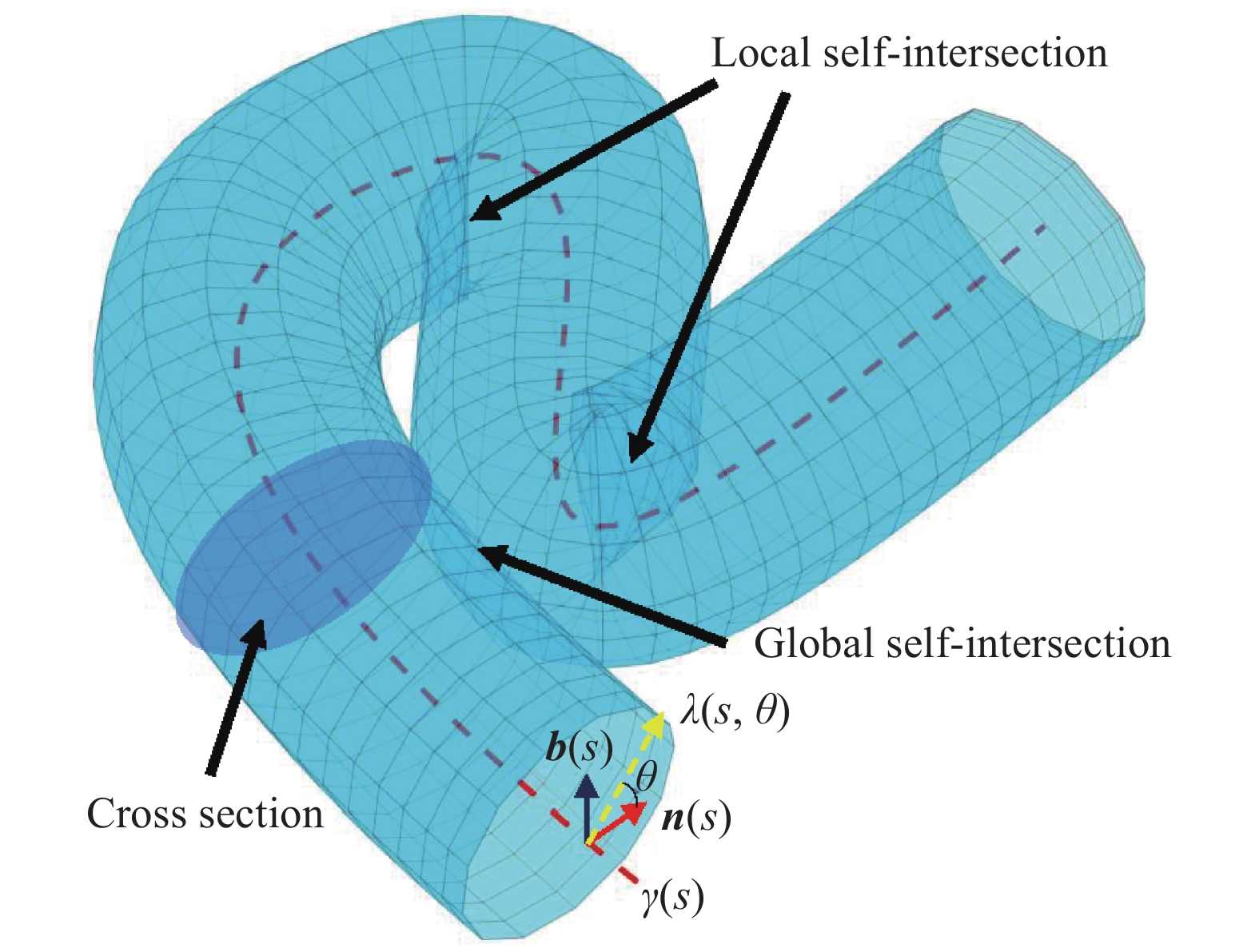
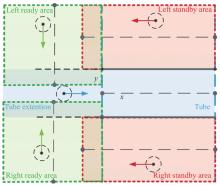
Fig 10
A straight-line virtual tube and some corresponding areas"
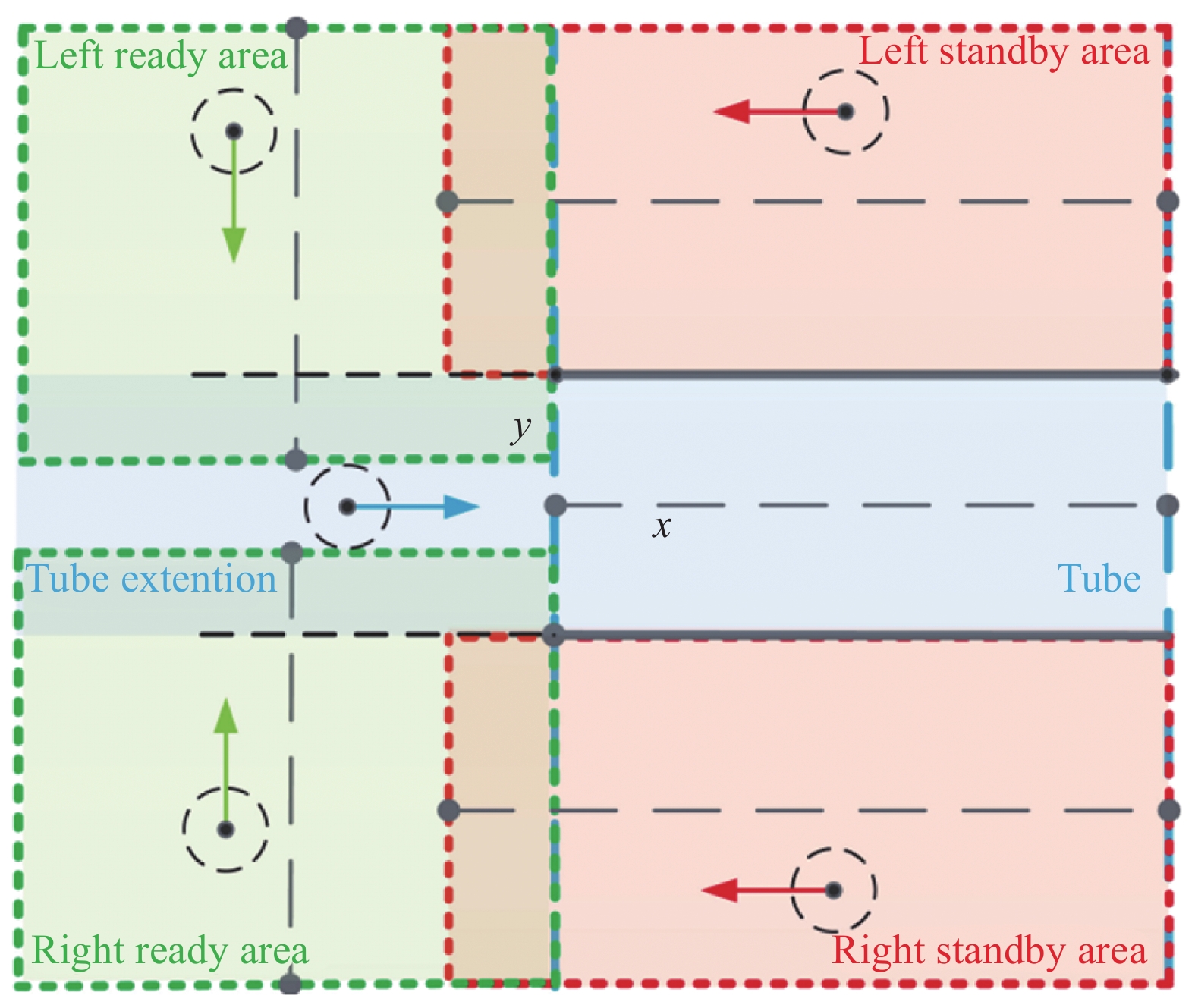
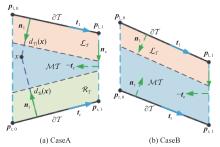
Fig 11
Several sub trapezoid virtual tubes for obstacle avoidance"
Fig 12
Vector field of a curve virtual tube"
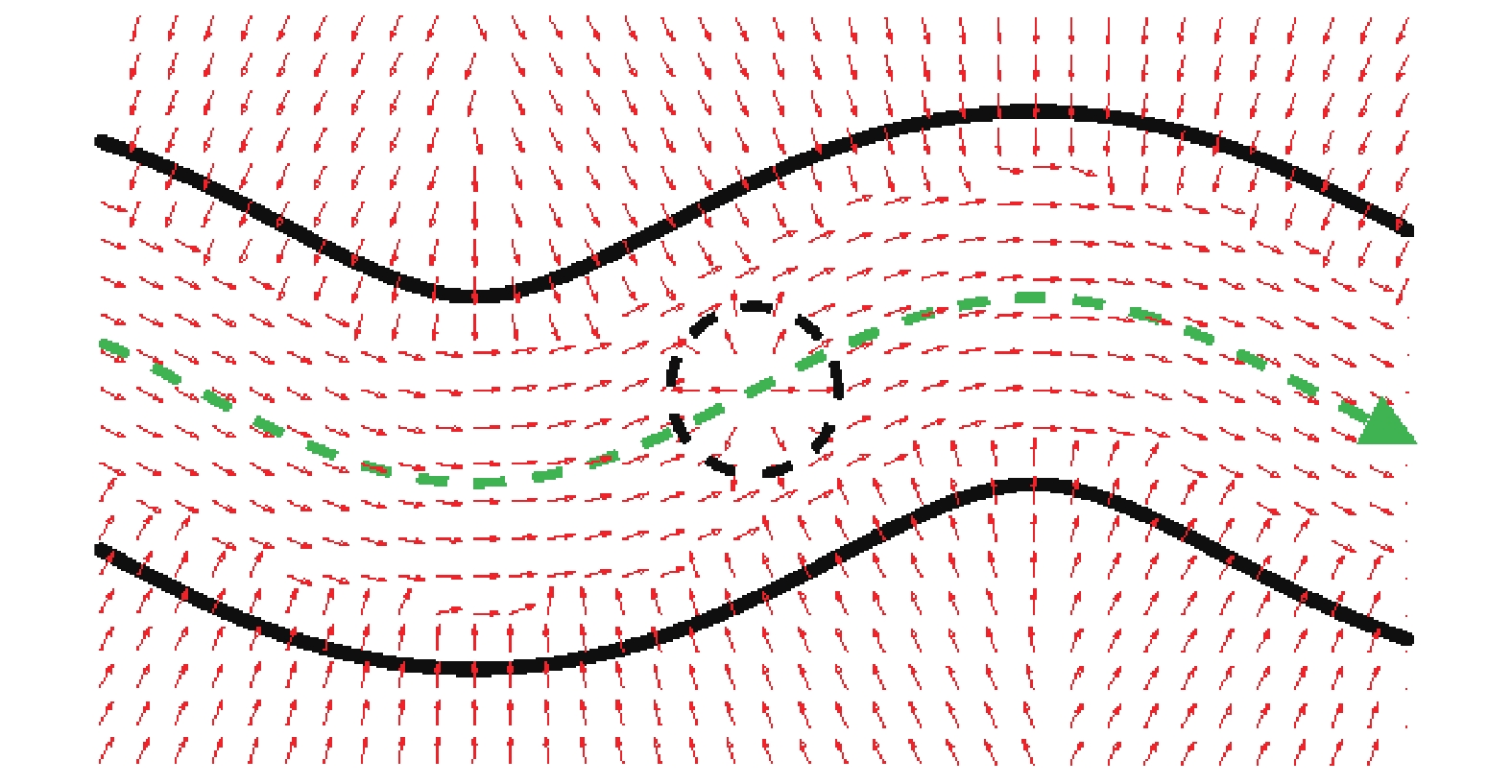
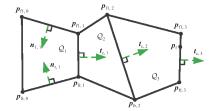
Fig 13
A connected quadrangle virtual tube"
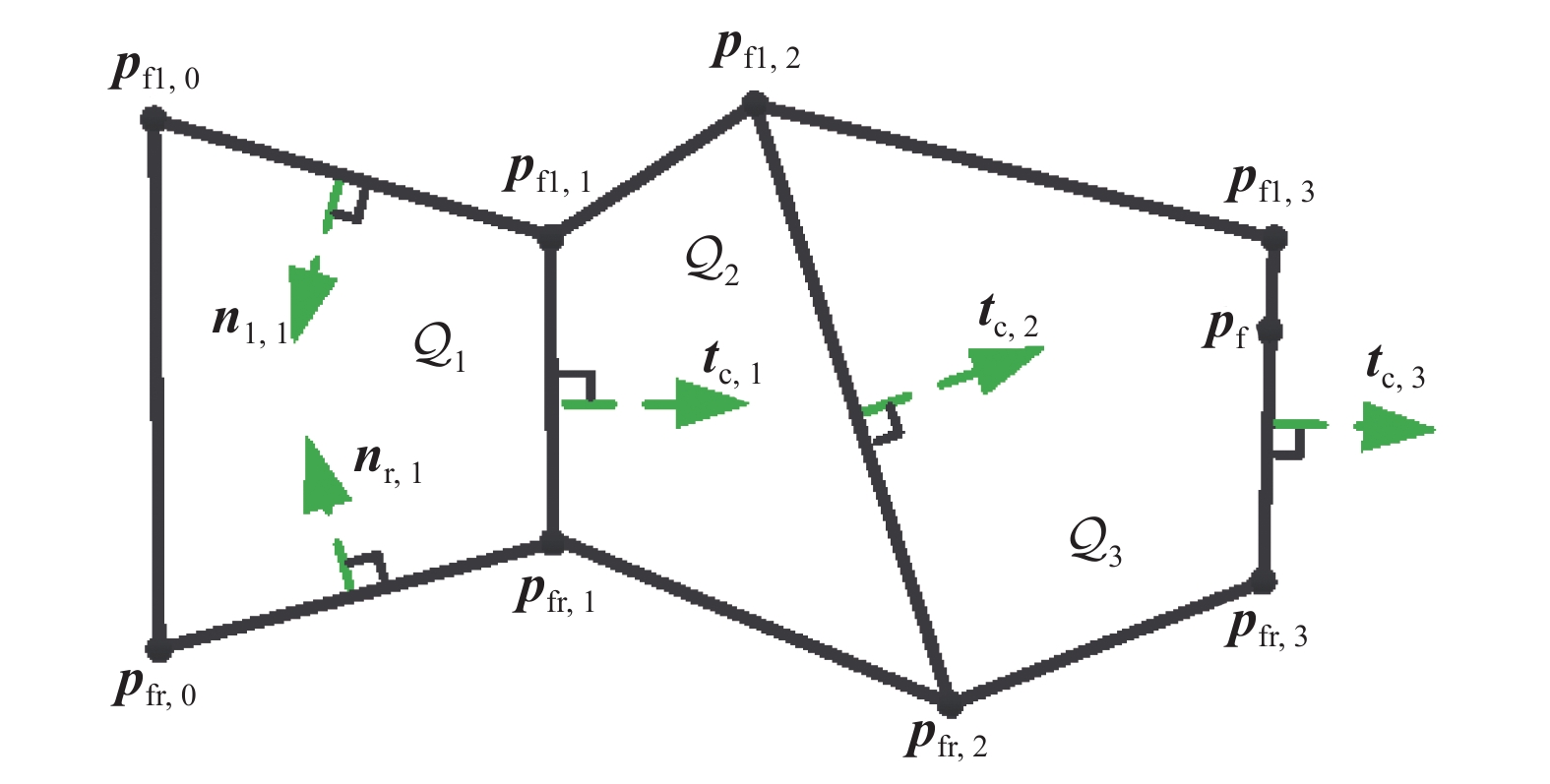
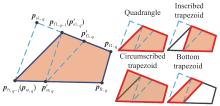
Fig 14
Inscribed trapezoid, circumscribed trapezoid and bottom trapezoid of a quadrangle"
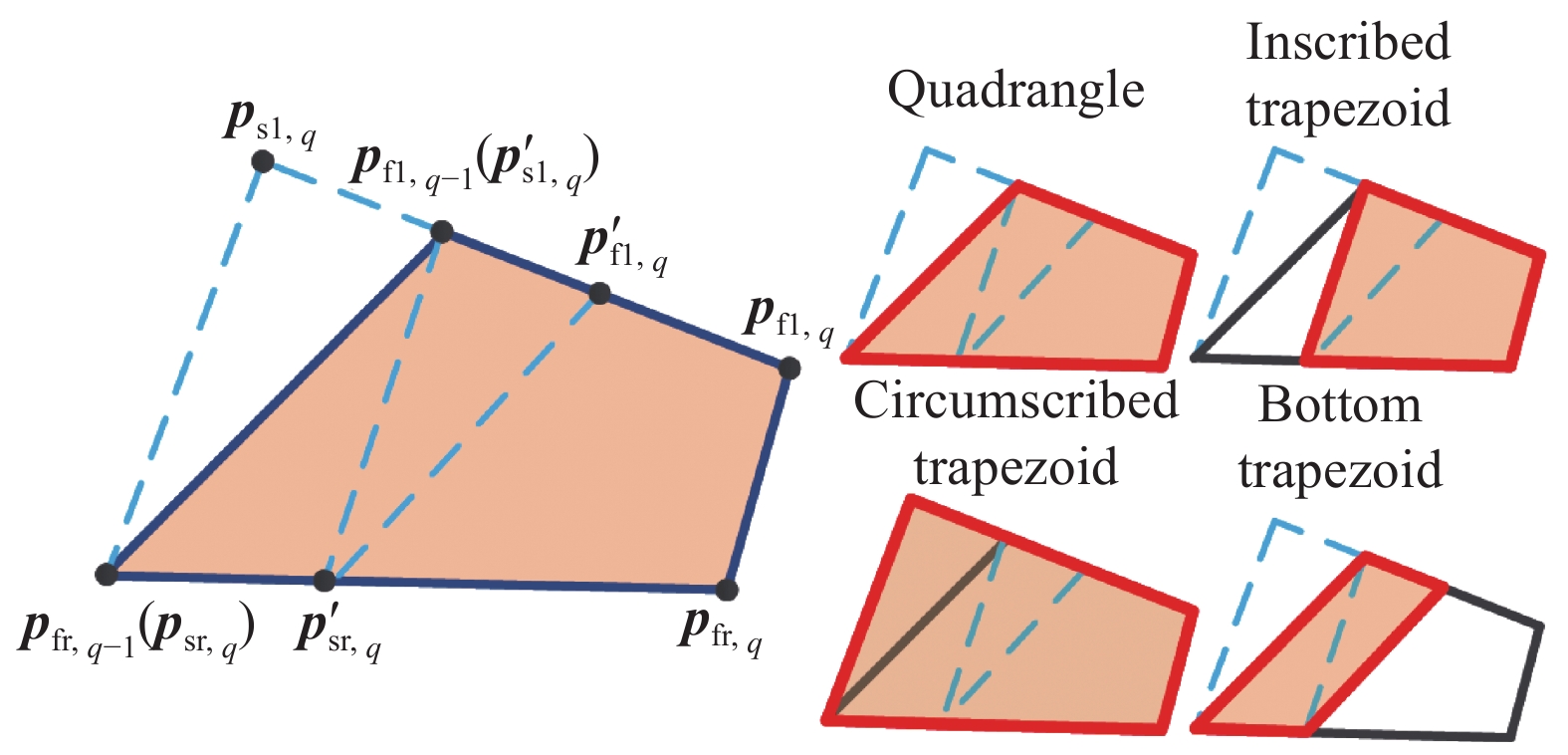
Fig 15
Virtual tube suitable for the racing track"
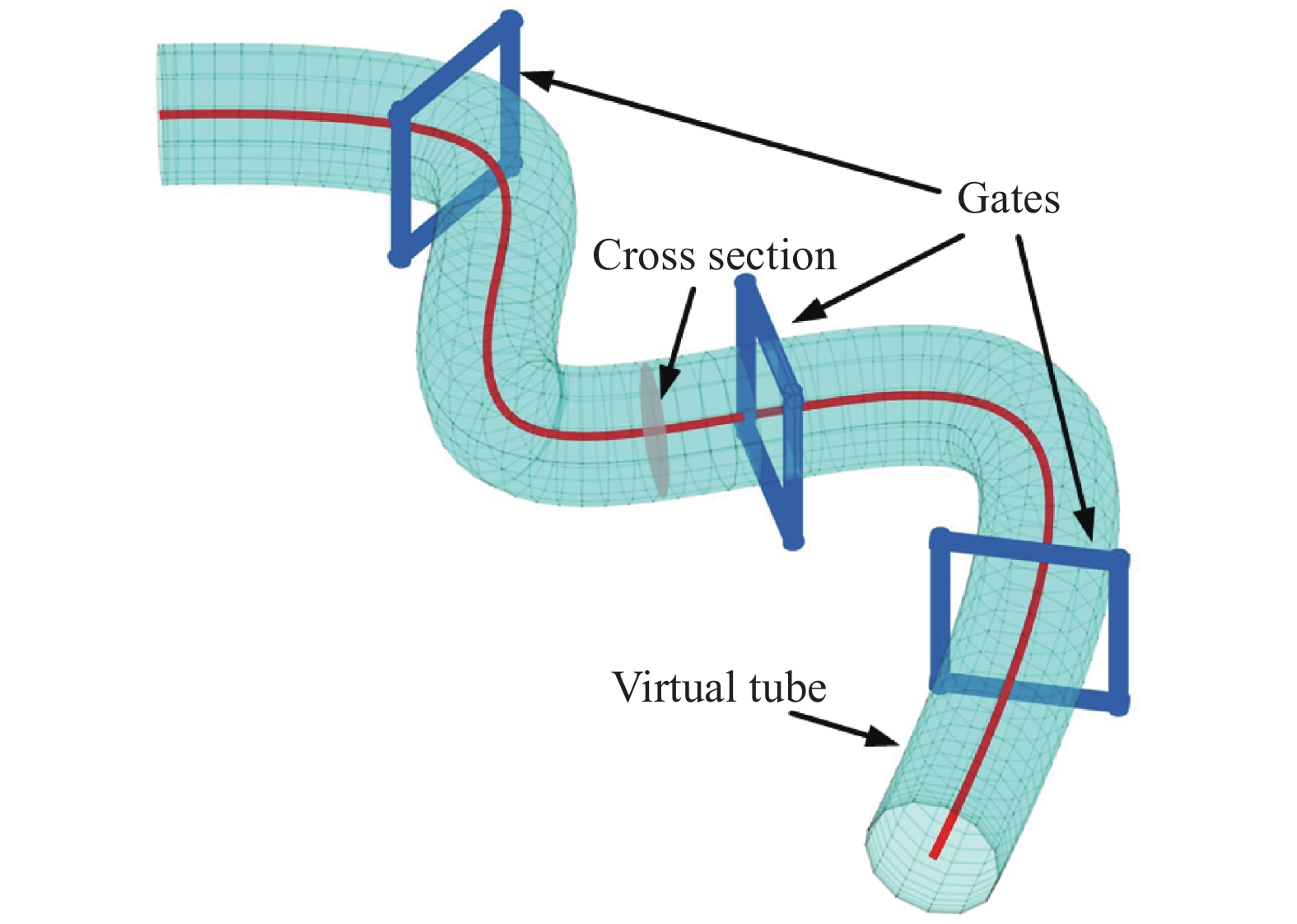
Table 2
Further work on virtual tube"
| Assumption | Possible option |
| Self-observation position | Precise, uncertain (communication uncertainty, IMU drift) |
| Relative position | Precise, uncertain; omnidirectional field of view, limited field of view |
| Virtual tube information | Fully known in advance, gradually improved during the process |
| Type of virtual tube | Regular (straight-line, trapezoid, curve), irregular (connected quadrangle); open, closed; line, tree, net |
| Type of virtual tube boundary | Hard constraint, soft constraint, adaptive constraint |
| Obstacle inside virtual tube | Yes (single, multiple; static, dynamic), no |
| Type of robot | Multicopter, fixed-wing UAV, autonomous road vehicle, USV, UUV |
| Control objective | Safety, efficiency, connectivity maintenance, target encirclement, target search |
| 1 |
QIN B Y, ZHANG D, TANG S, et al Two-layer formation-containment fault-tolerant control of fixed-wing UAV swarm for dynamic target tracking. Journal of Systems Engineering and Electronics, 2023, 34 (6): 1375- 1396.
doi: 10.23919/JSEE.2023.000153 |
| 2 |
KE C X, CAI K Y, QUAN Q Analysis of a uniform passive fault-tolerant control method for multicopters. Journal of Systems Engineering and Electronics, 2024, 35 (6): 1574- 1582.
doi: 10.23919/JSEE.2024.000127 |
| 3 | DO H T, HUA H T, NGUYEN M T, et al Formation control algorithms for multiple-UAVs: a comprehensive survey. EAI Endorsed Transactions on Industrial Networks and Intelligent Systems, 2021, 8 (27): e3. |
| 4 | CHEN X, ZHAO M Y, YIN L Y Dynamic path planning of the UAV avoiding static and moving obstacles. Journal of Intelligent & Robotic Systems, 2020, 99, 909- 931. |
| 5 |
ASKARI A, MORTAZAVI M, TALEBI H, et al A new approach in UAV path planning using Bezier–Dubins continuous curvature path. Proceedings of the Institution of Mechanical Engineers, Part G: Journal of Aerospace Engineering, 2016, 230 (6): 1103- 1113.
doi: 10.1177/0954410015603415 |
| 6 | ZHOU B Y, GAO F, PAN J, et al. Robust real-time UAV replanning using guided gradient-based optimization and topological paths. Proc. of the IEEE International Conference on Robotics and Automation, 2020: 1208−1214. |
| 7 |
KHATIB O Real-time obstacle avoidance for manipulators and mobile robots. The International Journal of Robotics Research, 1986, 5 (1): 90- 98.
doi: 10.1177/027836498600500106 |
| 8 | KIM J O, KHOSLA P K. Real-time obstacle avoidance using harmonic potential functions. IEEE Trans. on Robotics and Automation, 1992, 8(3): 338−349. |
| 9 | RIMON E. Exact robot navigation using artificial potential functions. Connecticut: Yale University, 1990. |
| 10 | QUAN Q, FU R, LI M X, et al Practical distributed control for VTOL UAVs to pass a virtual tube. IEEE Trans. on Intelligent Vehicles, 2021, 7 (2): 342- 353. |
| 11 |
GAO Y, BAI C G, QUAN Q Distributed control for a multi agent system to pass through a connected quadrangle virtual tube. IEEE Trans. on Control of Network Systems, 2023, 10 (2): 693- 705.
doi: 10.1109/TCNS.2022.3203936 |
| 12 | GAO Y, BAI C G, QUAN Q. Distributed control within a trapezoid virtual tube containing obstacles for robotic swarms subject to speed constraints. IEEE Trans. on Control of Network Systems, 2025, 12(1): 287−299. |
| 13 |
GAO Y, BAI C G, ZHANG L, et al Multi-UAV cooperative target encirclement within an annular virtual tube. Aerospace Science and Technology, 2022, 128, 107800.
doi: 10.1016/j.ast.2022.107800 |
| 14 | QUAN Q, GAO Y, BAI C G. Distributed control for a robotic swarm to pass through a curve virtual tube. Robotics and Autonomous Systems, 2023: 104368. |
| 15 |
GAO Y, BAI C G, QUAN Q Robust distributed control within a curve virtual tube for a robotic swarm under self-localization drift and precise relative navigation. International Journal of Robust and Nonlinear Control, 2023, 33 (16): 9489- 9513.
doi: 10.1002/rnc.6858 |
| 16 | RASEKHIPOUR Y, KHAJEPOUR A, CHEN S K, et al A potential field-based model predictive path-planning controller for autonomous road vehicles. IEEE Trans. on Intelligent Transportation Systems, 2016, 18 (5): 1255- 1267. |
| 17 |
LUO Y F, CAI P P, BERA A, et al Porca: modeling and planning for autonomous driving among many pedestrians. IEEE Robotics and Automation Letters, 2018, 3 (4): 3418- 3425.
doi: 10.1109/LRA.2018.2852793 |
| 18 |
LIU S, WATTERSON M, MOHTA K, et al Planning dynamically feasible trajectories for quadrotors using safe flight corridors in 3-D complex environments. IEEE Robotics and Automation Letters, 2017, 2 (3): 1688- 1695.
doi: 10.1109/LRA.2017.2663526 |
| 19 |
QUAN Q, LI M X, FU R Sky highway design for dense traffic. IFAC-PapersOnLine, 2021, 54 (2): 140- 145.
doi: 10.1016/j.ifacol.2021.06.019 |
| 20 | FU R, QUAN Q, LI M X, et al Practical distributed control for cooperative multicopters in structured free flight concepts. IEEE Trans. on Intelligent Transportation Systems, 2022, 24 (4): 4203- 4216. |
| 21 |
SAFADI Y, FU R, QUAN Q, et al Macroscopic fundamental diagrams for low-altitude air city transport. Transportation Research Part C: Emerging Technologies, 2023, 152, 104141.
doi: 10.1016/j.trc.2023.104141 |
| 22 |
DAI X H, KE C X, QUAN Q, et al RflySim: automatic test platform for UAV autopilot systems with FPGA-based hardware-in-the-loop simulations. Aerospace Science and Technology, 2021, 114, 106727.
doi: 10.1016/j.ast.2021.106727 |
| 23 | WANG S, DAI X H, KE C X, et al. RflySim: a rapid multicopter development platform for education and research based on Pixhawk and MATLAB. Proc. of the International Conference on Unmanned Aircraft Systems, 2021: 1587−1594. |
| 24 | QUAN Q, DAI X H, WANG S. Multicopter design and control practice: a series experiments based on MATLAB and Pixhawk. Singapore: Springer, 2020. |
| 25 | SHAH S, DEY D, LOVETT C, et al. AirSim: high-fidelity visual and physical simulation for autonomous vehicles. Proc. of the Field and Service Robotics: Results of the 11th International Conference, 2018: 621−635. |
| 26 |
WILSON S, GLOTFELTER P, WANG L, et al The robotarium: globally impactful opportunities, challenges, and lessons learned in remote-access, distributed control of multirobot systems. IEEE Control Systems Magazine, 2020, 40 (1): 26- 44.
doi: 10.1109/MCS.2019.2949973 |
| 27 |
ZHU H, CLARAMUNT F M, BRITO B, et al Learning interaction-aware trajectory predictions for decentralized multi-robot motion planning in dynamic environments. IEEE Robotics and Automation Letters, 2021, 6 (2): 2256- 2263.
doi: 10.1109/LRA.2021.3061073 |
| 28 |
SANTILLI M, MUKHERJEE P, WILLIAMS R K, et al Multirobot field of view control with adaptive decentralization. IEEE Trans. on Robotics, 2022, 38 (4): 2131- 2150.
doi: 10.1109/TRO.2022.3142660 |
| 29 |
LIU D J, ZONG C G, WANG D T, et al Multi-robot formation control based on high-order bilateral consensus. Measurement and Control, 2020, 53 (5/6): 983- 993.
doi: 10.1177/0020294020905075 |
| 30 |
HOY M, MATVEEV A S, SAVKIN A V Algorithms for collision-free navigation of mobile robots in complex cluttered environments: a survey. Robotica, 2015, 33 (3): 463- 497.
doi: 10.1017/S0263574714000289 |
| 31 |
HU J, ZHENG W X Adaptive tracking control of leader–follower systems with unknown dynamics and partial measurements. Automatica, 2014, 50 (5): 1416- 1423.
doi: 10.1016/j.automatica.2014.02.037 |
| 32 |
ZHAO S Y Affine formation maneuver control of multiagent systems. IEEE Trans. on Automatic Control, 2018, 63 (12): 4140- 4155.
doi: 10.1109/TAC.2018.2798805 |
| 33 |
CHEN L M, MEI J, LI C J, et al Distributed leader–follower affine formation maneuver control for high-order multiagent systems. IEEE Trans. on Automatic Control, 2020, 65 (11): 4941- 4948.
doi: 10.1109/TAC.2020.2986684 |
| 34 |
XU Y, LUO D L, LI D Y, et al Affine formation control for heterogeneous multi-agent systems with directed interaction networks. Neurocomputing, 2019, 330, 104- 115.
doi: 10.1016/j.neucom.2018.11.023 |
| 35 |
ANDERSON B D, YU C, FIDAN B, et al Rigid graph control architectures for autonomous formations. IEEE Control Systems Magazine, 2008, 28 (6): 48- 63.
doi: 10.1109/MCS.2008.929280 |
| 36 |
KRICK L, BROUCKE M E, FRANCIS B A Stabilisation of infinitesimally rigid formations of multi-robot networks. International Journal of Control, 2009, 82 (3): 423- 439.
doi: 10.1080/00207170802108441 |
| 37 | ROZENHECK O, ZHAO S, ZELAZO D. A proportional-integral controller for distance-based formation tracking. Proc. of the European Control Conference, 2015: 1693−1698. |
| 38 | BAE Y, LIM Y, AHN H Distributed robust adaptive gradient controller in distance-based formation control with exogenous disturbance. IEEE Trans. on Automatic Control, 2020, 66 (6): 2868- 2874. |
| 39 |
ZHAO S Y, ZELAZO D Bearing rigidity theory and its applications for control and estimation of network systems: life beyond distance rigidity. IEEE Control Systems Magazine, 2019, 39 (2): 66- 83.
doi: 10.1109/MCS.2018.2888681 |
| 40 | LI X L, WEN C Y, CHEN C Adaptive formation control of networked robotic systems with bearing-only measurements. IEEE Trans. on Cybernetics, 2020, 51 (1): 199- 209. |
| 41 | DIJKSTRA E W. A note on two problems in connexion with graphs. KRZYSZTOF R A, TONY H, ed. Edsger Wybe Dijkstra: his life, work, and legacy. New York: Association for Computing Machinery, 2022: 287−290. |
| 42 |
HART P E, NILSSON N J, RAPHAEL B A formal basis for the heuristic determination of minimum cost paths. IEEE Trans. on Systems Science and Cybernetics, 1968, 4 (2): 100- 107.
doi: 10.1109/TSSC.1968.300136 |
| 43 | LIKHACHEV M, GORDON G J, THRUN S. ARA*: anytime A* with provable bounds on sub-optimality. Proc. of the Advances in Neural Information Processing Systems 16, 2003. https://proceedings.neurips.cc/paper/2003/hash/ee8fe9093fbbb687bef15a38facc44d2-Abstract.html. |
| 44 | DOLGOV D, THRUN S, MONTEMERLO M, et al Practical search techniques in path planning for autonomous driving. Ann Arbor, 2008, 1001 (48105): 18- 80. |
| 45 |
HARABOR D, GRASTIEN A Online graph pruning for pathfinding on grid maps. Proceedings of the AAAI Conference on Artificial Intelligence, 2011, 25 (1): 1114- 1119.
doi: 10.1609/aaai.v25i1.7994 |
| 46 | GERAERTS R, OVERMARS M H. A comparative study of probabilistic roadmap planners. Proc. of the Algorithmic Foundations of Robotics V, 2004: 43−57. |
| 47 |
LAVALLE S M, KUFFNER JR J J Randomized kinodynamic planning. The International Journal of Robotics Research, 2001, 20 (5): 378- 400.
doi: 10.1177/02783640122067453 |
| 48 | KARAMAN S, FRAZZOLI E. Incremental sampling-based algorithms for optimal motion planning. Robotics Science and Systems VI, 2010, 104(2): 267−274. |
| 49 |
PATLE B, PANDEY A, PARHI D, et al A review: on path planning strategies for navigation of mobile robot. Defence Technology, 2019, 15 (4): 582- 606.
doi: 10.1016/j.dt.2019.04.011 |
| 50 |
AGGARWAL S, KUMAR N Path planning techniques for unmanned aerial vehicles: a review, solutions, and challenges. Computer Communications, 2020, 149, 270- 299.
doi: 10.1016/j.comcom.2019.10.014 |
| 51 |
CHENG C X, SHA Q X, HE B, et al Path planning and obstacle avoidance for AUV: a review. Ocean Engineering, 2021, 235, 109355.
doi: 10.1016/j.oceaneng.2021.109355 |
| 52 |
WANG Z P, ZHOU X, XU C, et al Geometrically constrained trajectory optimization for multicopters. IEEE Trans. on Robotics, 2022, 38 (5): 3259- 3278.
doi: 10.1109/TRO.2022.3160022 |
| 53 | MELLINGER D, KUSHLEYEV A, KUMAR V. Mixed-integer quadratic program trajectory generation for heterogeneous quadrotor teams. Proc. of the IEEE International Conference on Robotics and Automation, 2012: 477−483. |
| 54 | CULLIGAN K F. Online trajectory planning for UAVs using mixed integer linear programming. Cambridge: Massachusetts Institute of Technology, 2006. |
| 55 |
VAN NIEUWSTADT M J, MURRAY R M Real-time trajectory generation for differentially flat systems. International Journal of Robust and Nonlinear Control, 1998, 8 (11): 995- 1020.
doi: 10.1002/(SICI)1099-1239(199809)8:11<995::AID-RNC373>3.0.CO;2-W |
| 56 | MELLINGER D, KUMAR V. Minimum snap trajectory generation and control for quadrotors. Proc. of the IEEE International Conference on Robotics and Automation, 2011: 2520−2525. |
| 57 | RICHTER C, BRY A, ROY N. Polynomial trajectory planning for aggressive quadrotor flight in dense indoor environment. Proc. of the 16th International Symposium of Robotics Research, 2016: 649−666. |
| 58 | CHEN J, LIU T B, SHEN S J. Online generation of collision-free trajectories for quadrotor flight in unknown cluttered environments. Proc. of the IEEE International Conference on Robotics and Automation, 2016: 1476−1483. |
| 59 |
MAC T T, COPOT C, TRAN D T, et al A hierarchical global path planning approach for mobile robots based on multi-objective particle swarm optimization. Applied Soft Computing, 2017, 59, 68- 76.
doi: 10.1016/j.asoc.2017.05.012 |
| 60 | BAI X, YAN W, CAO M, et al Distributed multi-vehicle task assignment in a time-invariant drift field with obstacles. IET Control Theory & Applications, 2019, 13 (17): 2886- 2893. |
| 61 | EROKHIN A, EROKHIN V, SOTNIKOV S, et al. Optimal multi-robot path finding algorithm based on A*. SILHAVY R, SILHAVY P, PROKOPOVA Z, ed. Intelligent systems in cybernetics and automation control theory. Cham: Springer, 2019. |
| 62 |
SUN G B, ZHOU R, DI B, et al A novel cooperative path planning for multi-robot persistent coverage with obstacles and coverage period constraints. Sensors, 2019, 19 (9): 1994.
doi: 10.3390/s19091994 |
| 63 | PREISS J A, HONIG W, AYANIAN N, et al. Downwash-aware trajectory planning for large quadrotor teams. Proc. of the IEEE/RSJ International Conference on Intelligent Robots and Systems, 2017: 250−257. |
| 64 |
MADRIDANO A, AL-KAFF A, MARTIN D, et al 3D trajectory planning method for UAVs swarm in building emergencies. Sensors, 2020, 20 (3): 642.
doi: 10.3390/s20030642 |
| 65 | WU P C, LI L, XIE J F, et al. Probabilistically guaranteed path planning for safe urban air mobility using chance constrained RRT. Proc. of the AIAA Aviation Forum, 2020: 2914. |
| 66 |
BERNING A W, GIRARD A, KOLMANOVSKY I, et al Rapid uncertainty propagation and chance-constrained path planning for small unmanned aerial vehicles. Advanced Control for Applications: Engineering and Industrial Systems, 2020, 2 (1): e23.
doi: 10.1002/adc2.23 |
| 67 | SONG B D, KIM J, MORRISON J R Rolling horizon path planning of an autonomous system of UAVs for persistent cooperative service: MILP formulation and efficient heuristics. Journal of Intelligent & Robotic Systems, 2016, 84, 241- 258. |
| 68 | LAL R, SHARDA A, PRABHAKAR P. Optimal multi-robot path planning for pesticide spraying in agricultural fields. Proc. of the IEEE 56th Conference on Decision and Control, 2017: 5815−5820. |
| 69 |
KUSHLEYEV A, MELLINGER D, POWERS C, et al Towards a swarm of agile micro quadrotors. Autonomous Robots, 2013, 35 (4): 287- 300.
doi: 10.1007/s10514-013-9349-9 |
| 70 |
SORIA E, SCHIANO F, FLOREANO D Predictive control of aerial swarms in cluttered environments. Nature Machine Intelligence, 2021, 3 (6): 545- 554.
doi: 10.1038/s42256-021-00341-y |
| 71 |
ZHANG C Y, CHU D F, LIU S D, et al Trajectory planning and tracking for autonomous vehicle based on state lattice and model predictive control. IEEE Intelligent Transportation Systems Magazine, 2019, 11 (2): 29- 40.
doi: 10.1109/MITS.2019.2903536 |
| 72 | PARK J, KIM H J Online trajectory planning for multiple quadrotors in dynamic environments using relative safe flight corridor. IEEE Robotics and Automation Letters, 2020, 6 (2): 659- 666. |
| 73 | PARK J, KIM H J. Fast trajectory planning for multiple quadrotors using relative safe flight corridor. Proc. of the IEEE/RSJ International Conference on Intelligent Robots and Systems, 2019: 596−603. |
| 74 |
PARK J, KIM D, KIM G C, et al Online distributed trajectory planning for quadrotor swarm with feasibility guarantee using linear safe corridor. IEEE Robotics and Automation Letters, 2022, 7 (2): 4869- 4876.
doi: 10.1109/LRA.2022.3152702 |
| 75 |
LUIS C E, VUKOSAVLJEV M, SCHOELLIG A P Online trajectory generation with distributed model predictive control for multi-robot motion planning. IEEE Robotics and Automation Letters, 2020, 5 (2): 604- 611.
doi: 10.1109/LRA.2020.2964159 |
| 76 | ZHOU X, ZHU J C, ZHOU H Y, et al. Ego-swarm: a fully autonomous and decentralized quadrotor swarm system in cluttered environments. Porc. of the IEEE International Conference on Robotics and Automation, 2021: 4101−4107. |
| 77 | ZHOU X, WANG Z, WEN X, et al. Decentralized spatial-temporal trajectory planning for multicopter swarms. https://arxiv.org/abs/2106.12481. |
| 78 | REYNOLDS C W. Flocks, herds and schools: a distributed behavioral model. Proc. of the 14th Annual Conference on Computer Graphics and Interactive Techniques, 1987: 25−34. |
| 79 |
LIU B, WANG S L, LI Q H, et al Task assignment of UAV swarms based on deep reinforcement learning. Drones, 2023, 7 (5): 297.
doi: 10.3390/drones7050297 |
| 80 |
VICSEK T, CZIROK A, BEN-JACOB E, et al Novel type of phase transition in a system of self-driven particles. Physical Review Letters, 1995, 75 (6): 1226.
doi: 10.1103/PhysRevLett.75.1226 |
| 81 |
COUZIN I D, KRAUSE J, JAMES R, et al Collective memory and spatial sorting in animal groups. Journal of Theoretical Biology, 2002, 218 (1): 1- 11.
doi: 10.1006/jtbi.2002.3065 |
| 82 |
CUCKER F, SMALE S Emergent behavior in flocks. IEEE Trans. on Automatic Control, 2007, 52 (5): 852- 862.
doi: 10.1109/TAC.2007.895842 |
| 83 | LA H M, SHENG W Flocking control algorithms for multiple agents in cluttered and noisy environments. Bio-Inspired Self-Organizing Robotic Systems, 2011, 355, 53- 79. |
| 84 |
BAN Z, HU J, LENNOX B, et al Self-organised collision-free flocking mechanism in heterogeneous robot swarms. Mobile Networks and Applications, 2021, 26 (6): 2461- 2471.
doi: 10.1007/s11036-021-01785-7 |
| 85 | BEAVER L E, KRONINGER C, MALIKOPOULOS A A. An optimal control approach to flocking. Proc. of the American Control Conference, 2020: 683−688. |
| 86 | BEAVER L E, MALIKOPOULOS A A. Beyond reynolds: a constraint-driven approach to cluster flocking. Proc. of the IEEE 59th Conference on Decision and Control, 2020: 208−213. |
| 87 |
LIU X Y, XIANG X J, CHANG Y, et al Hierarchical weighting Vicsek model for flocking navigation of drones. Drones, 2021, 5 (3): 74.
doi: 10.3390/drones5030074 |
| 88 | ARFKEN G B, WEBER H J. Mathematical methods for physicists. Waltham: Academic Press, 2011. |
| 89 | PANAGOU D. Motion planning and collision avoidance using navigation vector fields. Proc. of the IEEE International Conference on Robotics and Automation, 2014: 2513−2518. |
| 90 | HERNANDEZ-MARTINEZ E G, ARANDA-BRICAIRE E. Convergence and collision avoidance in formation control: a survey of the artificial potential functions approach. Rijeka: IntechOpen, 2011. |
| 91 |
ROSTAMI S M H, SANGAIAH A K, WANG J, et al Obstacle avoidance of mobile robots using modified artificial potential field algorithm. EURASIP Journal on Wireless Communications and Networking, 2019, 2019 (1): 1- 19.
doi: 10.1186/s13638-018-1318-8 |
| 92 | ANTICH J, ORTIZ A. Extending the potential fields approach to avoid trapping situations. Proc. of the IEEE/RSJ International Conference on Intelligent Robots and Systems, 2005: 1386−1391. |
| 93 |
GE S S, FUA C H Queues and artificial potential trenches for multirobot formations. IEEE Trans. on Robotics, 2005, 21 (4): 646- 656.
doi: 10.1109/TRO.2005.847617 |
| 94 | VADAKKEPAT P, TAN K C, MING-LIANG W. Evolutionary artificial potential fields and their application in real time robot path planning. Proc. of the Congress on Evolutionary Computation, 2000: 256−263. |
| 95 |
OROZCO-ROSAS U, MONTIEL O, SEPULVEDA R Mobile robot path planning using membrane evolutionary artificial potential field. Applied Soft Computing, 2019, 77, 236- 251.
doi: 10.1016/j.asoc.2019.01.036 |
| 96 |
KODITSCHEK D E, RIMON E Robot navigation functions on manifolds with boundary. Advances in Applied Mathematics, 1990, 11 (4): 412- 442.
doi: 10.1016/0196-8858(90)90017-S |
| 97 |
MASOUD A A Decentralized self-organizing potential field-based control for individually motivated mobile agents in a cluttered environment: a vector-harmonic potential field approach. IEEE Trans. on Systems, Man, and Cybernetics-Part A: Systems and Humans, 2007, 37 (3): 372- 390.
doi: 10.1109/TSMCA.2007.893483 |
| 98 | PANAGOU D, STIPANOVIC D M, VOULGARIS P G Distributed coordination control for multi-robot networks using Lyapunov-like barrier functions. IEEE Trans. on Automatic Control, 2015, 61 (3): 617- 632. |
| 99 | ZHAO T, LI H D, DIAN S Y Multi-robot path planning based on improved artificial potential field and fuzzy inference system. Journal of Intelligent & Fuzzy Systems, 2020, 39 (5): 7621- 7637. |
| 100 | FREW E, LAWRENCE D. Cooperative stand-off tracking of moving targets by a team of autonomous aircraft. Proc. of the AIAA Guidance, Navigation, and Control Conference and Exhibit, 2005: 6363. |
| 101 |
GONCALVES V M, PIMENTA L C, MAIA C A, et al Vector fields for robot navigation along time-varying curves in n-dimensions. IEEE Trans. on Robotics, 2010, 26 (4): 647- 659.
doi: 10.1109/TRO.2010.2053077 |
| 102 |
FREW E W, LAWRENCE D Tracking dynamic star curves using guidance vector fields. Journal of Guidance, Control, and Dynamics, 2017, 40 (6): 1488- 1495.
doi: 10.2514/1.G002134 |
| 103 | REZENDE A M, GONCALVES V M, PIMENTA L C Constructive time-varying vector fields for robot navigation. IEEE Trans. on Robotics, 2021, 38 (2): 852- 867. |
| 104 | REZENDE A M, GONC ALVES V M, RAFFO G V, et al. Robust fixed-wing UAV guidance with circulating artificial vector fields. Proc. of the IEEE/RSJ International Conference on Intelligent Robots and Systems, 2018: 5892−5899. |
| 105 |
POTHEN A A, RATNOO A Curvature-constrained Lyapunov vector field for standoff target tracking. Journal of Guidance, Control, and Dynamics, 2017, 40 (10): 2729- 2736.
doi: 10.2514/1.G002281 |
| 106 | YAO W, DE MARINA H G, SUN Z, et al. Distributed coordinated path following using guiding vector fields. Proc. of the IEEE International Conference on Robotics and Automation, 2021: 10030−10037. |
| 107 |
MARCHIDAN A, BAKOLAS E Collision avoidance for an unmanned aerial vehicle in the presence of static and moving obstacles. Journal of Guidance, Control, and Dynamics, 2020, 43 (1): 96- 110.
doi: 10.2514/1.G004446 |
| 108 | PANAGOU D A distributed feedback motion planning protocol for multiple unicycle agents of different classes. IEEE Trans. on Automatic Control, 2016, 62 (3): 1178- 1193. |
| 109 | HE X D, LI Z K. Simultaneous position and orientation planning of nonholonomic multi-robot systems: a dynamic vector field approach. IEEE Trans. on Automatic Control, 2024, 69(12): 8354−8369. |
| 110 | HE X, SUN Z, LI Z. A novel vector-field-based motion planning for 3D nonholonomic robots. https://arxiv.org/abs/2302.11110. |
| 111 | SINGH L, STEPHANOU H, WEN J. Real-time robot motion control with circulatory fields. Proc. of the IEEE International Conference on Robotics and Automation, 1996: 2737−2742. |
| 112 |
HADDADIN S, BELDER R, ALBU-SCHAFFER A Dynamic motion planning for robots in partially unknown environments. IFAC Proceedings Volumes, 2011, 44 (1): 6842- 6850.
doi: 10.3182/20110828-6-IT-1002.02500 |
| 113 | ATAKA A, LAM H K, ALTHOEFER K. Reactive magnetic-field-inspired navigation for nonholonomic mobile robots in unknown environments. Proc. of the IEEE International Conference on Robotics and Automation, 2018: 6983−6988. |
| 114 | LAHA R, FIGUEREDO L F, VRABEL J, et al. Reactive cooperative manipulation based on set primitives and circular fields. Proc. of the IEEE International Conference on Robotics and Automation, 2021: 6577−6584. |
| 115 |
BECKER M, LILGE T, MULLER M A, et al Circular fields and predictive multi-agents for online global trajectory planning. IEEE Robotics and Automation Letters, 2021, 6 (2): 2618- 2625.
doi: 10.1109/LRA.2021.3061997 |
| 116 | AMES A D, COOGAN S, EGERSTEDT M, et al. Control barrier functions: theory and applications. Proc. of the 18th European Control Conference, 2019: 3420−3431. |
| 117 | LAMPORT L Proving the correctness of multiprocess programs. IEEE Trans. on Software Engineering, 1977, 3 (2): 125- 143. |
| 118 | SLOTINE J J E, LI W. Applied nonlinear control. Englewood Cliffs: Prentice Hall, 1991. |
| 119 | ABRAHAM R, MARSDEN J E, RATIU T. Manifolds, tensor analysis, and applications. New York: Springer, 2012. |
| 120 |
AMES A D, GALLOWAY K, SREENATH K, et al Rapidly exponentially stabilizing control Lyapunov functions and hybrid zero dynamics. IEEE Trans. on Automatic Control, 2014, 59 (4): 876- 891.
doi: 10.1109/TAC.2014.2299335 |
| 121 | FREEMAN R, KOKOTOVIC P V. Robust nonlinear control design: state-space and Lyapunov techniques. Birkhäuser Boston: Springer, 2008. |
| 122 |
BORRMANN U, WANG L, AMES A D, et al Control barrier certificates for safe swarm behavior. IFAC-PapersOnLine, 2015, 48 (27): 68- 73.
doi: 10.1016/j.ifacol.2015.11.154 |
| 123 | AMES A D, GRIZZLE J W, TABUADA P. Control barrier function based quadratic programs with application to adaptive cruise control. Proc. of the IEEE 53rd Conference on Decision and Control, 2014: 6271−6278. |
| 124 | WANG L, AMES A D, EGERSTEDT M. Multi-objective compositions for collision-free connectivity maintenance in teams of mobile robots. Proc. of the IEEE 55th Conference on Decision and Control, 2016: 2659−2664. |
| 125 |
GLOTFELTER P, CORTES J, EGERSTEDT M Nonsmooth barrier functions with applications to multi-robot systems. IEEE Control Systems Letters, 2017, 1 (2): 310- 315.
doi: 10.1109/LCSYS.2017.2710943 |
| 126 | WANG L, AMES A D, EGERSTEDT M. Safe certificate-based maneuvers for teams of quadrotors using differential flatness. Proc. of the IEEE International Conference on Robotics and Automation, 2017: 3293−3298. |
| 127 | SQUIRES E, PIERPAOLI P, EGERSTEDT M. Constructive barrier certificates with applications to fixed-wing aircraft collision avoidance. Proc. of the IEEE Conference on Control Technology and Applications, 2018: 1656−1661. |
| 128 | SQUIRES E, KONDA R, PIERPAOLI P, et al. Safety with limited range sensing constraints for fixed wing aircraft. Proc. of the IEEE International Conference on Robotics and Automation, 2021: 9065−9071. |
| 129 | AIRBUS. Airbus skyways: the future of the parcel delivery in smart cities. https://www.embention. com/project/airbus-parcel-delivery/. |
| 130 | MAO P D, QUAN Q. Making robotics swarm flow more smoothly: a regular virtual tube model. Proc. of the IEEE/RSJ International Conference on Intelligent Robots and Systems, 2022: 4498−4504. |
| 131 |
MAO P D, FU R, QUAN Q Optimal virtual tube planning and control for swarm robotics. The International Journal of Robotics Research, 2024, 43 (5): 602- 627.
doi: 10.1177/02783649231210012 |
| 132 | SONG W Q, GAO Y, QUAN Q Speed and density planning for a speed-constrained robot swarm through a virtual tube. IEEE Robotics and Automation Letters, 2023, 9 (11): 10628- 10635. |
| 133 | QUAN Q, FU R, CAI K Y How far two UAVs should be subject to communication uncertainties. IEEE Trans. on Intelligent Transportation Systems, 2022, 24 (1): 429- 445. |
| 134 |
GAO Y, BAI C G, FU R, et al A non-potential orthogonal vector field method for more efficient robot navigation and control. Robotics and Autonomous Systems, 2023, 159, 104291.
doi: 10.1016/j.robot.2022.104291 |
| 135 | LV S L, GAO Y, CHE J X, et al. Autonomous drone racing: time-optimal spatial iterative learning control within a virtual tube. Proc. of the IEEE International Conference on Robotics and Automation, 2023: 3197−3203. |
| [1] | Jun CHEN, Xiang SUN, Zhe XUE, Xinyu ZHANG. Target intention prediction of air combat based on Mog-GRU-D network under incomplete information [J]. Journal of Systems Engineering and Electronics, 2025, 36(4): 972-984. |
| [2] | Ning WANG, Xiaolong LIANG, Zhe LI, Yueqi HOU, Aiwu YANG. Joint planning method for cross-domain unmanned swarm target assignment and mission trajectory [J]. Journal of Systems Engineering and Electronics, 2025, 36(3): 736-753. |
| [3] | Zhaogen ZHONG, Cunxiang XIE, Kun JIN. Blind recognition of polar code parameters based on log-likelihood ratio [J]. Journal of Systems Engineering and Electronics, 2025, 36(3): 642-658. |
| [4] | Zhan CHEN, Yangwang FANG, Ruitao ZHANG, Wenxing FU. Factor graph method for target state estimation in bearing-only sensor network [J]. Journal of Systems Engineering and Electronics, 2025, 36(2): 380-396. |
| [5] | Zhixian LIU, Wei SHAO, Xi CHENG, Haiyan OU, Xiao DING. Feature selection for determining input parameters in antenna modeling [J]. Journal of Systems Engineering and Electronics, 2025, 36(1): 15-23. |
| [6] | Yimin FENG, Ping GE, Yanli SHAO, Qiang ZOU, Yusheng LIU. UAF-based integration of design and simulation model for system-of-systems [J]. Journal of Systems Engineering and Electronics, 2025, 36(1): 108-126. |
| [7] | Xueqiang GU, Lina LU, Fengtao XIANG, Wanpeng ZHANG. Formation-containment control for nonholonomic multi-agent systems with a desired trajectory constraint [J]. Journal of Systems Engineering and Electronics, 2025, 36(1): 256-268. |
| [8] | Yashuai CAO, Tiejun LYU, Wei NI. Twin-timescale design for IRS-assisted MIMO system with outdated CSI [J]. Journal of Systems Engineering and Electronics, 2024, 35(6): 1380-1387. |
| [9] | Jianmin JI, Wei WANG, Huilong YU, Juan LIU, Bo CHEN. Investigation of the electrical performance of high-speed aircraft radomes using a thermo-mechanical-electrical coupling model [J]. Journal of Systems Engineering and Electronics, 2024, 35(6): 1397-1410. |
| [10] | Xiaobo DUAN, Qiucen FAN, Wenhao BI, An ZHANG. Belief exponential divergence for D-S evidence theory and its application in multi-source information fusion [J]. Journal of Systems Engineering and Electronics, 2024, 35(6): 1454-1468. |
| [11] | Keyi ZHOU, Ningyun LU, Bin JIANG, Xianfeng MENG. Review on uncertainty analysis and information fusion diagnosis of aircraft control system [J]. Journal of Systems Engineering and Electronics, 2024, 35(5): 1245-1263. |
| [12] | Ai GAO, Shengnan XU, Zichen ZHAO, Haibin SHANG, Rui XU. Fault diagnosis method of link control system for gravitational wave detection [J]. Journal of Systems Engineering and Electronics, 2024, 35(4): 922-931. |
| [13] | Haibin WANG, Xin GUAN, Xiao YI, Guidong SUN. Heterogeneous information fusion recognition method based on belief rule structure [J]. Journal of Systems Engineering and Electronics, 2024, 35(4): 955-964. |
| [14] | Shaojie MAO, Lianwang DIAO, Yu SUN, Heng WANG, Kan YI, Xin XU, Xiaobin MAO, Kecheng ZHANG, Long SHENG. A framework of force of information influence and application for C4KISR system [J]. Journal of Systems Engineering and Electronics, 2024, 35(2): 430-443. |
| [15] | Dongsheng XU, Yuanjin YU, Xiaoli ZHANG, Xiafu PENG. Improved spatio-temporal alignment measurement method for hull deformation [J]. Journal of Systems Engineering and Electronics, 2024, 35(2): 485-494. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||