
Journal of Systems Engineering and Electronics ›› 2025, Vol. 36 ›› Issue (6): 1645-1657.doi: 10.23919/JSEE.2025.000162
• CONTROL THEORY AND APPLICATION • Previous Articles
Xinyu ZHAO1( ), Jiongqi WANG1(), Bowen HOU1(), Chao XU2(), Xuanying ZHOU1,*()
), Jiongqi WANG1(), Bowen HOU1(), Chao XU2(), Xuanying ZHOU1,*()
Received:2024-04-23
Online:2025-12-18
Published:2026-01-07
Contact:
Xuanying ZHOU
E-mail:zhaoxinyunudt@nudt.edu.cn;wjq_gfkd@163.com;houbowen95@126.com;xc_1987@126.com;Julia_chow07@163.com
About author:Supported by:Xinyu ZHAO, Jiongqi WANG, Bowen HOU, Chao XU, Xuanying ZHOU. Optimal navigation landmark selection for the mars landing phases based on visual constraint observability matrix[J]. Journal of Systems Engineering and Electronics, 2025, 36(6): 1645-1657.

Fig 1
Coordinate system schematic"
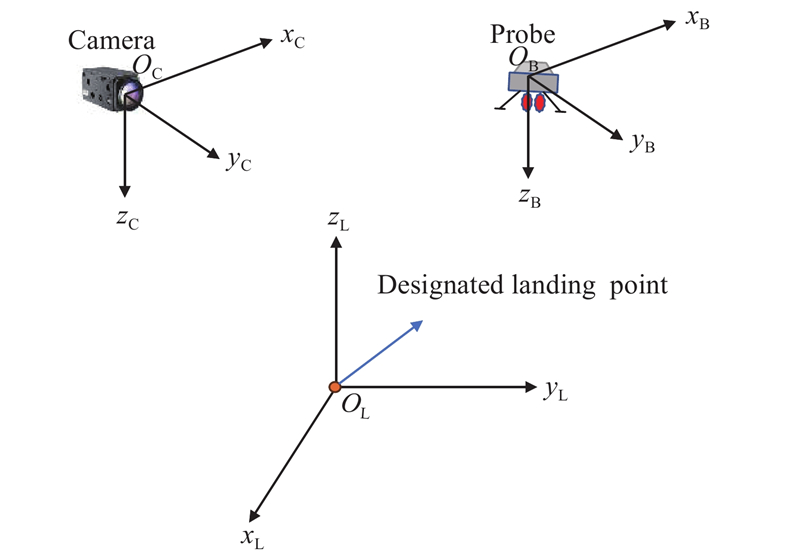

Fig 2
Combined navigation schematic"


Fig 3
Schematic diagram of probe and landmark positions"
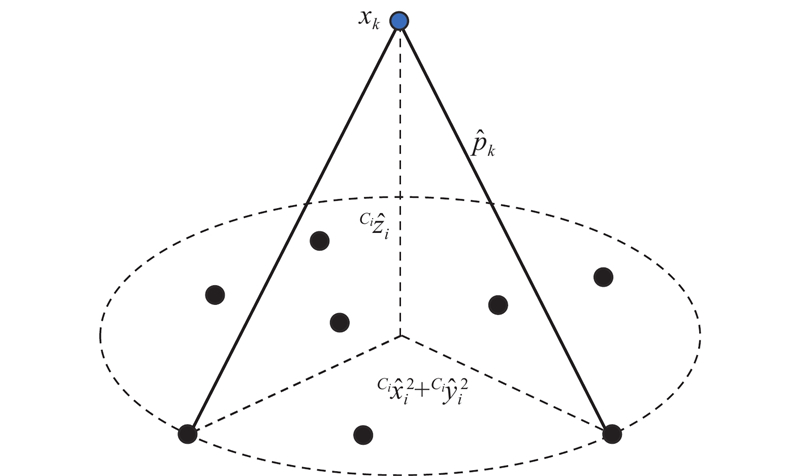
Table 1
True state of the detector at the initial moment"
| State component | Real value |
Fig 4
Number of visible landmarks"
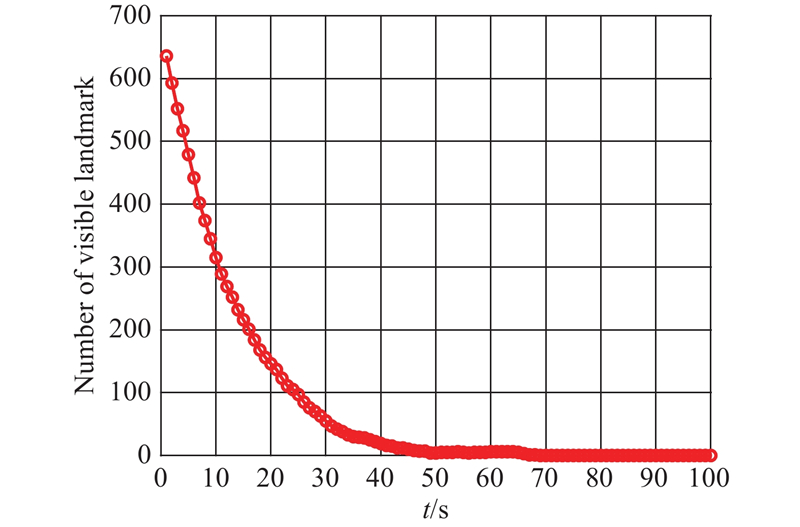
Fig 5
Images of the probe’s landing orbit and randomly distributed landmark"
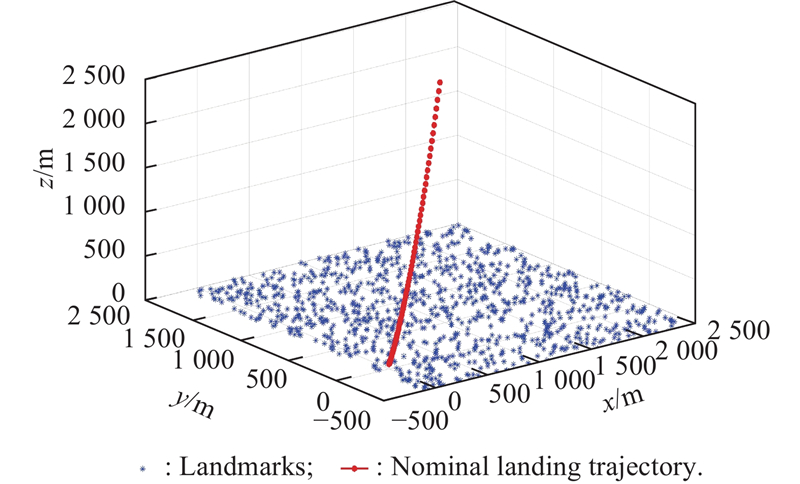
Table 2
Maximum number of landmarks selected and the running time for different ${{\boldsymbol{U}}_{{\boldsymbol{\min}} }}$"
| Maximum number of landmarks | Maximum running time/s | Average running time/s | |
| 5 | |||
| 8 | |||
| 19 | |||
| Not set | 650 |
Fig 6
Navigation position error with ${{\boldsymbol{U}}_{{\bf{min}} }}$ and without ${{\boldsymbol{U}}_{{\bf{min}} }}$"
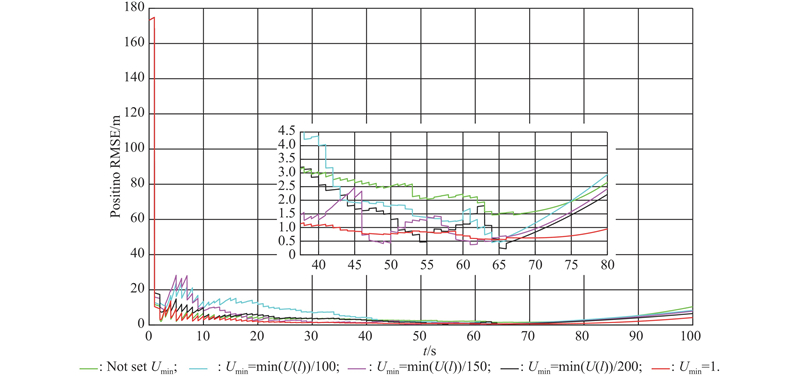
Fig 7
Number of selection landmarks under each moment"
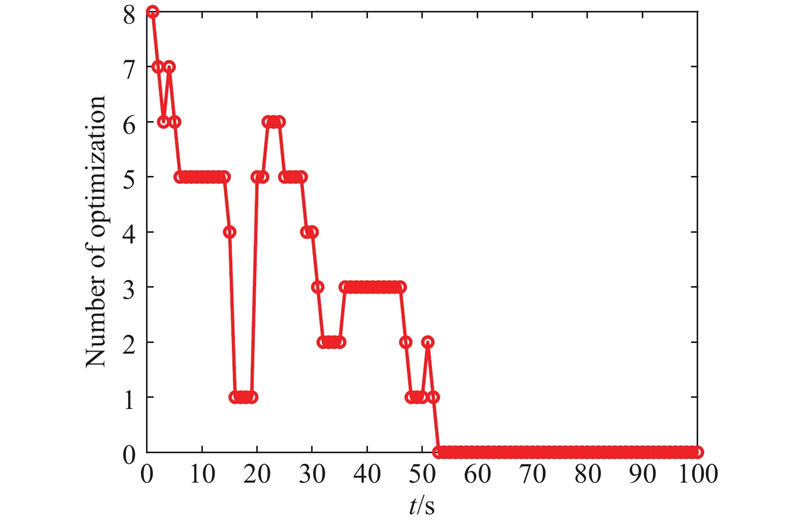
Fig 8
State errors comparison"
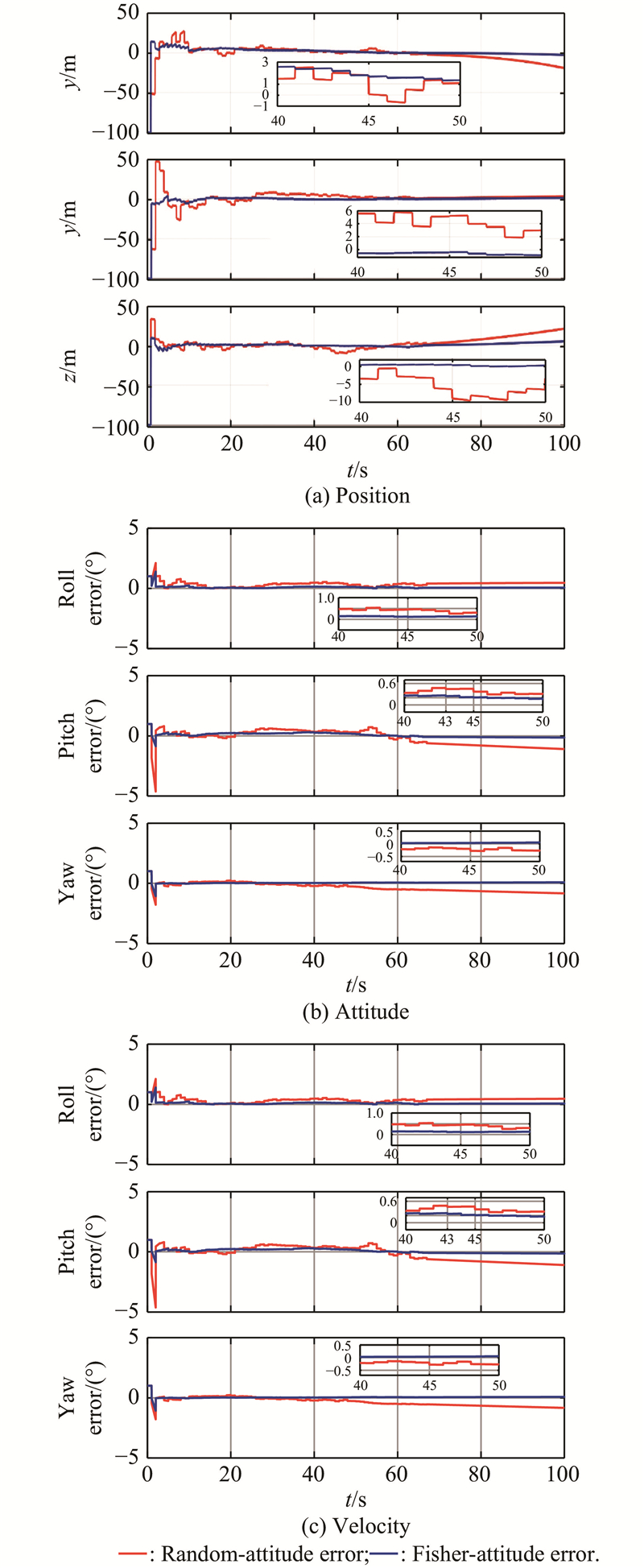
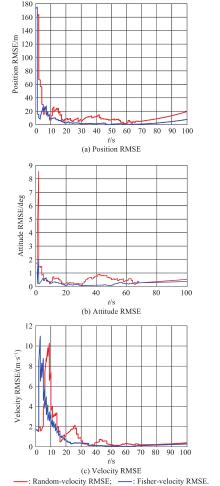
Fig 9
State RMSE comparison"
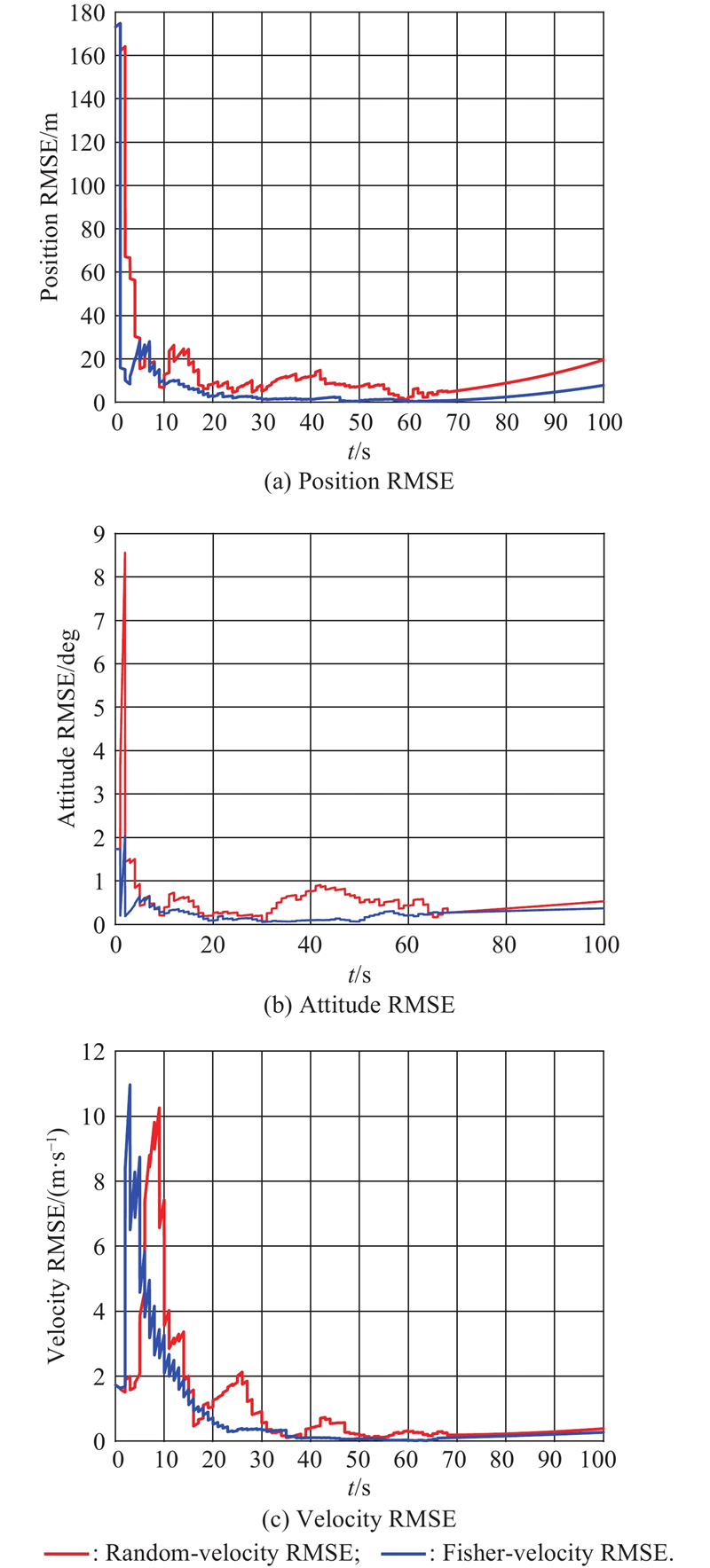

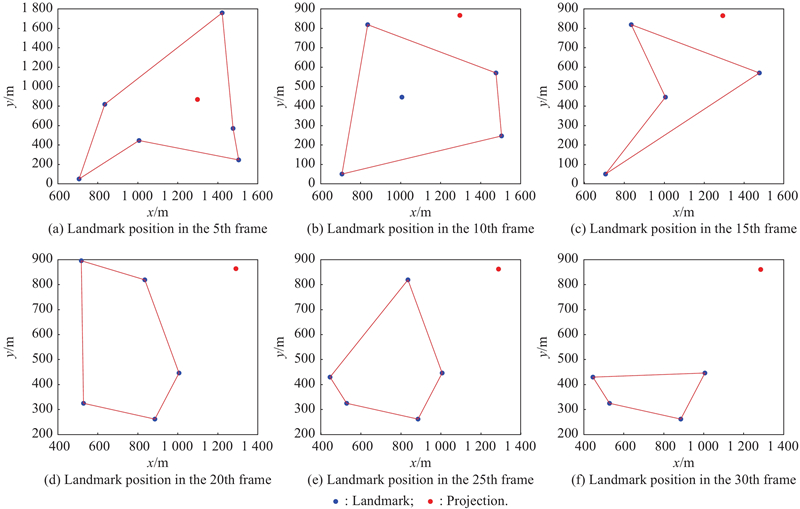
Fig 10
Location map of some of the selection landmark"
| 1 |
CLAUDET T, TOMITA K, HO K Benchmark analysis of semantic segmentation algorithms for safe planetary landing site selection. IEEE Access, 2022, 10, 41766- 41775.
doi: 10.1109/ACCESS.2022.3167763 |
| 2 |
WANG J Q, HE Z M, ZHOU H Y, et al Optimal weight and parameter estimation of multi-structure and unequal-precision data fusion. Chinese Journal of Electronics, 2017, 26 (6): 1245- 1253.
doi: 10.1049/cje.2017.09.030 |
| 3 |
ZHANG Y J, WANG J Q, HOU B W, et al Optimal maneuvering strategy of spacecraft evasion based on angles-only measurement and observability analysis. Journal of Systems Engineering and Electronics, 2023, 34 (1): 172- 184.
doi: 10.23919/JSEE.2023.000026 |
| 4 |
ZHANG L C, GONG C L, SU H, et al Design methodology of a mini-missile considering flight performance and guidance precision. Journal of Systems Engineering and Electronics, 2024, 35 (1): 195- 210.
doi: 10.23919/JSEE.2024.000007 |
| 5 |
WANG T, ZHU Z, ZHOU X, et al A function-based behavioral modeling method for air combat simulation. Journal of Systems Engineering and Electronics, 2024, 35 (4): 945- 954.
doi: 10.23919/JSEE.2024.000068 |
| 6 | SCHMAUS P, BAUER A, BECHTEL N, et al. Extending the knowledge driven approach for scalable autonomy teleoperation of a robotic avatar. Proc. of the IEEE Aerospace Conference. 2023. DOI: 10.1109/AERO55745.2023. 10115960. |
| 7 | MADNI A, HEVERLY M, FOSSE E, et al. Surface timeline management and analysis for the mars sample return mission. Proc. of the IEEE Aerospace Conference. 2024. DOI: 10.1109/ AERO58975.2024.10521286. |
| 8 |
LU Y, WANG J Q, HE Z M, et al System error iterative identification for underwater positioning based on spectral clustering. Journal of Systems Engineering and Electronics, 2024, 35 (4): 1028- 1041.
doi: 10.23919/JSEE.2024.000069 |
| 9 | KOLB J, SRIVASTAVA D, FEIGH K M. The effects of inaccurate decision-support systems on structured shared decision-making for human-robot teams. Proc. of the IEEE 32nd International Conference on Robot and Human Interactive Communication, 2023: 1273–1278. |
| 10 | LU Q, XU Q C, LIN R, et al. Optimization of shortest time control scheme for mars rover landing proce. Proc. of the 3rd International Conference on Electrical Engineering and Control Science, 2023: 1533–1537. |
| 11 |
CHEN X, SUN Z W, ZHANG W, et al A novel autonomous celestial integrated navigation for deep space exploration based on angle and stellar spectra shift velocity measurement. Sensors, 2019, 19 (11): 2555.
doi: 10.3390/s19112555 |
| 12 |
PAN Y, ZHANG S, WANG X, et al A fine acquisition algorithm based on fast three-time FRFT for dynamic and weak GNSS Signals. Journal of Systems Engineering and Electronics, 2023, 34 (2): 259- 269.
doi: 10.23919/JSEE.2023.000017 |
| 13 |
XIONG K, WEI C L Q-learning-based target selection for bearings-only autonomous navigation. Journal of Systems Science and Complexity, 2021, 34 (4): 1401- 1425.
doi: 10.1007/s11424-020-9265-y |
| 14 |
HUANG L, SONG J M, ZHANG C Y Observability analysis and filter design for a vision inertial absolute navigation system for UAV using landmarks. Optik, 2017, 149, 455- 468.
doi: 10.1016/j.ijleo.2017.09.060 |
| 15 |
YU Z S, CUI P Y, ZHU S Y Observability-based beacon configuration optimization for mars entry navigation. Journal of Guidance Control and Dynamics, 2015, 38 (4): 643- 650.
doi: 10.2514/1.G000014 |
| 16 |
DELAUNE J, LE BESNERAIS G, VOIRIN T, et al Visual-inertial navigation for pinpoint planetary landing using scale-based landmark matching. Robotics and Autonomous Systems, 2016, 78, 63- 82.
doi: 10.1016/j.robot.2016.01.007 |
| 17 |
ZHU S Y, LIU D, LIU Y, et al Observability-based visual navigation using landmarks measuring angle for pinpoint landing. Acta Astronautica, 2019, 155, 313- 324.
doi: 10.1016/j.actaastro.2018.10.011 |
| 18 |
LIU W, JIN Y F, ZHANG L, et al Dynamic access task scheduling of LEO constellation based on space-based distributed computing. Journal of Systems Engineering and Electronics, 2024, 35 (4): 842- 854.
doi: 10.23919/JSEE.2024.000071 |
| 19 |
DU H, WANG W, WANG X R, et al Scene image recognition with knowledge transfer for drone navigation. Journal of Systems Engineering and Electronics, 2023, 34 (5): 1309- 1318.
doi: 10.23919/JSEE.2023.000096 |
| 20 |
CHENG H, GAO S, CAI X, et al Method of improving pedestrian navigation performance based on chest card. Journal of Systems Engineering and Electronics, 2024, 35 (4): 987- 998.
doi: 10.23919/JSEE.2024.000084 |
| 21 | JI H X, ZON H, LIE Y Landmark selection method of small celestial autonomous landing navigation system based on FPSO. Computer Simulation, 2021, 38 (1): 21- 26. |
| 22 | XU C, HUANG X Y, LI M D, et al Landmark database selection for vision-aided inertial navigation in planetary landing missions. Aerospace Science and Technology, 2021, 58 (11): 2313- 2327. |
| 23 | XU C, WANG D Y, HUANG X Y Autonomous navigation based on sequential images for planetary landing in unknown environments. Journal of Guidance, Control, And Dynamics, 2017, 40 (10): 2587- 2602. |
| 24 |
XU C, WANG D, HUANG X Y Landmark-based autonomous navigation for pinpoint planetary landing. Advances in Space Research, 2016, 58 (11): 2313- 2327.
doi: 10.1016/j.asr.2016.08.021 |
| 25 | PONDA S, KOLACINSKI R, FRAZZOLI E. Trajectory optimization for target localization using small unmanned aerial vehicles. Proc. of the AIAA Guidance, Navigation, and Control Conference, 2009. DOI: 10.2514/6. 2009-6015. |
| 26 |
HAM F, BROWN R Observability, Eigenvalues, and Kalman Filtering. IEEE Trans. on Aerospace and Electronic Systems, 1983, AES-19 (2): 269- 273.
doi: 10.1109/TAES.1983.309446 |
| 27 |
TICHAVSKY P, MURAVCHIK C H, NEHORAI A Posterior Cramer-Rao bounds for discrete-time nonlinear filtering. IEEE Trans. on Signal Processing, 1998, 46 (5): 1386- 1396.
doi: 10.1109/78.668800 |
| 28 | WANG J S, CHEN S C, LIAO Y J, et al Mitogen-activated protein Kinase Kinase 2, a novel E2-interacting protein, promotes the growth of classical swine fever virus via attenuation of the JAK-STAT signaling pathway. Journal of Virology, 2017, 91 (23): 16- 17. |
| 29 | WANG L. Modeling and optimization for multi-uavs cooperative target tracking. Changsha: National University of Defense Technology, 2011. (in Chinese) |
| 30 | HE Y, LI S L, GUO Q. Landmark based position and orientation method with tilt compensation for missile launcher. Proc. of the 35th Chinese Control Conference, 2016: 5585–5589. |
| [1] | Xiujie Qu, He Chen, and Guihua Peng. Novel detection method for infrared small targets using weighted information entropy [J]. Journal of Systems Engineering and Electronics, 2012, 23(6): 838-842. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||