
Journal of Systems Engineering and Electronics ›› 2025, Vol. 36 ›› Issue (6): 1629-1644.doi: 10.23919/JSEE.2025.000163
• CONTROL THEORY AND APPLICATION • Previous Articles
Xintao WANG1,2( ), Ming YANG1,2(), Mingzhe HOU3(), Songyan WANG1,2(), Tao CHAO1,2,*()
), Ming YANG1,2(), Mingzhe HOU3(), Songyan WANG1,2(), Tao CHAO1,2,*()
Received:2024-09-18
Online:2025-12-18
Published:2026-01-07
Contact:
Tao CHAO
E-mail:healer121380@qq.com;myang@hit.edu.cn;hithyt@hit.edu.cn;sywang@hit.edu.cn;chaotao2000@163.com
About author:Supported by:Xintao WANG, Ming YANG, Mingzhe HOU, Songyan WANG, Tao CHAO. Cooperative guidance law against active defensive aircraft in two-on-two engagement[J]. Journal of Systems Engineering and Electronics, 2025, 36(6): 1629-1644.
Fig 1
Two-on-two engagement scenario"
Fig 2
Time evolutions of $ {{\boldsymbol{\varphi}} _{{\boldsymbol{1}}{\boldsymbol{,j}}}} $ and $ {{\boldsymbol{\varphi}} _{{\boldsymbol{11,j}}}} $"
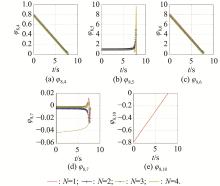
Fig 3
Time evolutions of $ {{\boldsymbol{\varphi}} _{{\boldsymbol{8,j}}}} $"

Table 1
Simulation parameters in Case 1"
| Parameter | Attacker | Protector | Defender | Target |
| Position/m | (0,100) | (0,100) | (2 000,100) | (2 400,100) |
| Course/(°) | 6 | 10 | 110 | 160 |
| Velocity/(m/s) Time constant/s | 300 0.1 | 300 0.1 | 310 0.1 | 320 0.1 |
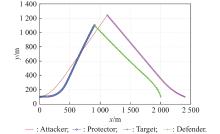
Fig 4
Trajectories of guidance law in (39)"
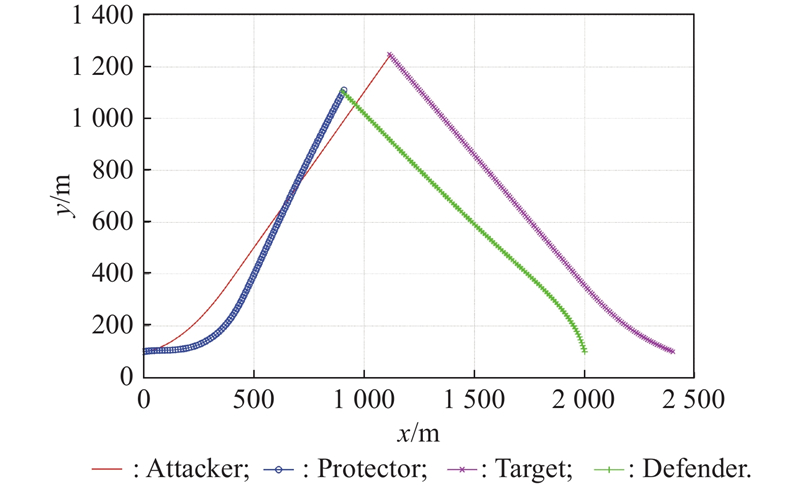
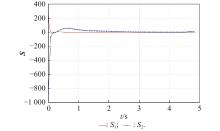
Fig 5
Time evolutions of sliding surface ${\boldsymbol{S}}$"
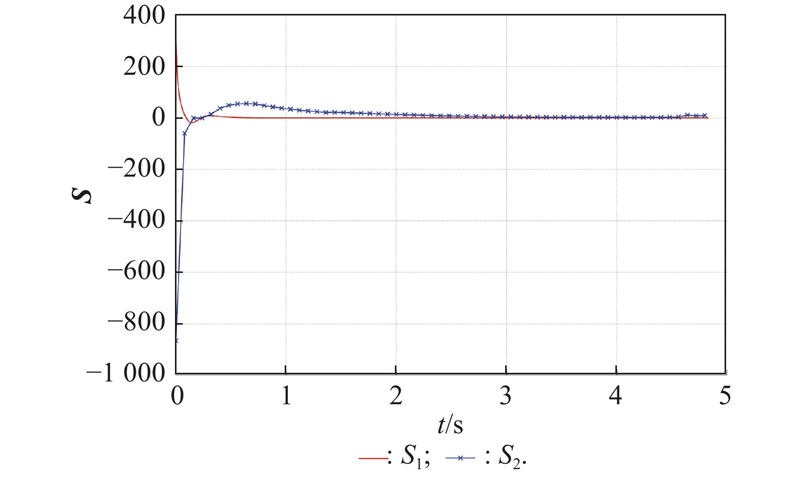
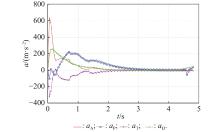
Fig 6
Accelerations of the players"
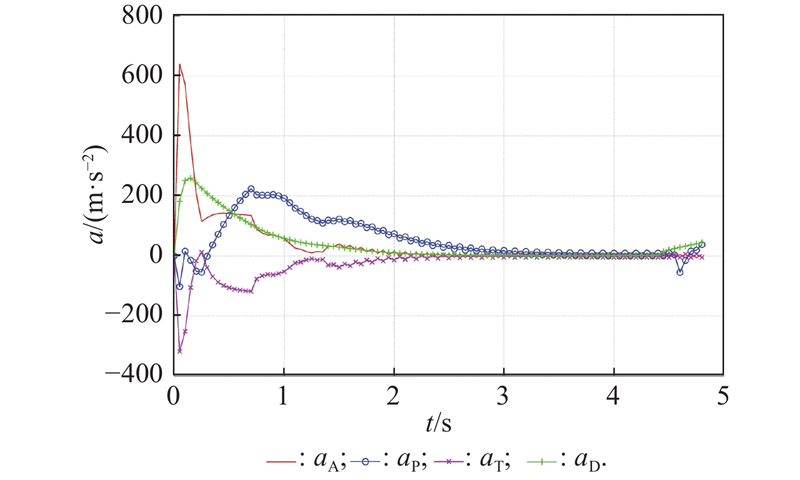
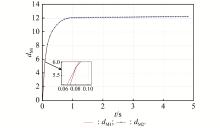
Fig 7
Time evolution of adaptive gain terms"
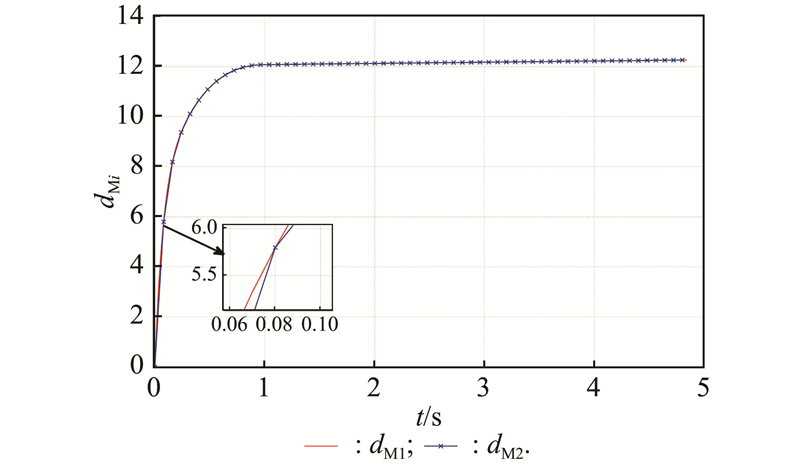
Table 2
Simulation parameters in Case 2"
| Parameter | Attacker | Protector | Defender | Target |
| Position/m | (0,0) | (0,100) | (2 000,0) | (2 100,100) |
| Course/(°) | 5 | 10 | 160 | 150 |
| Velocity/(m/s) Time constant/s | 320 0.1 | 200 0.1 | 350 0.1 | 360 0.1 |
Fig 8
Trajectories of guidance law in (46)"
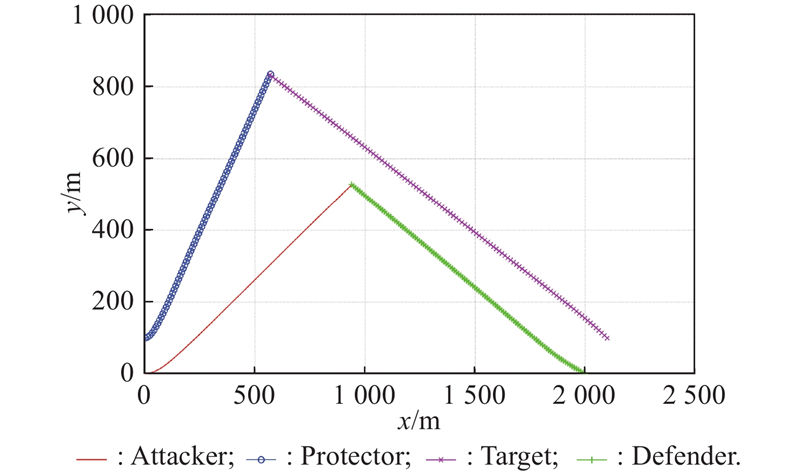
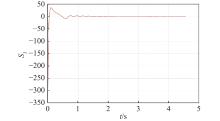
Fig 9
Time evolution of sliding surface ${{\boldsymbol{S}}_{\boldsymbol{3}}}$"
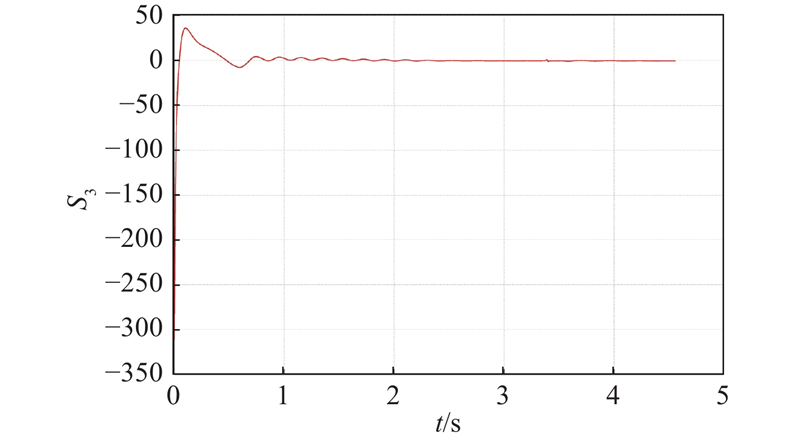
Fig 10
Time evolutions of the accelerations"
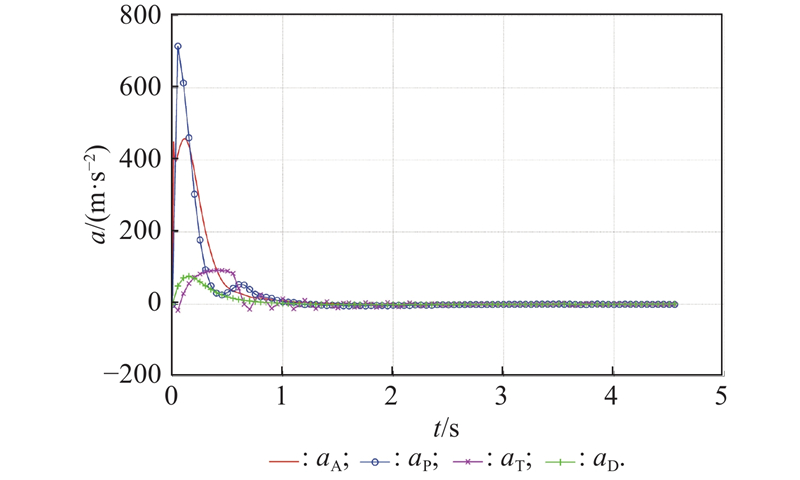
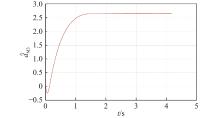
Fig 11
Time evolution of adaptive gain term $\hat {\boldsymbol{d}}_{{\bf{M3}}} $"
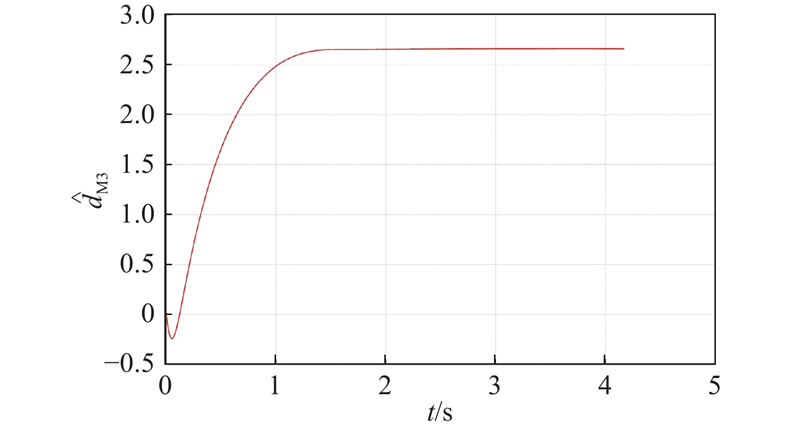
Table 3
Simulation parameters"
| Parameter | Attacker | Protector | Defender | Target |
| Position/m | (0,100) | (300,100) | (2 600,100) | (3 500,100) |
| Course/(°) | 6 | 10 | 170 | 170 |
| Velocity/(m/s) Time constant/s | 310 0.1 | 310 0.1 | 310 0.1 | 320 0.1 |
Fig 12
Combat trajectories of the guidance law"
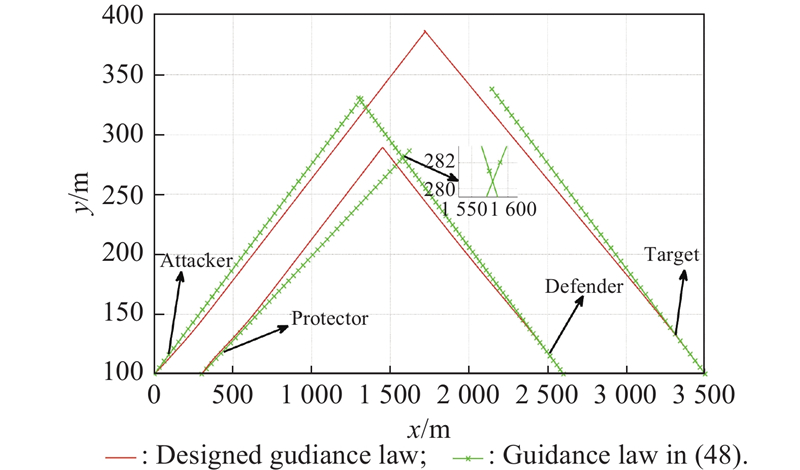
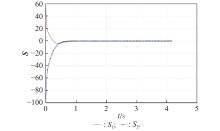
Fig 13
Time evolution of sliding surface ${\boldsymbol{S}}$"
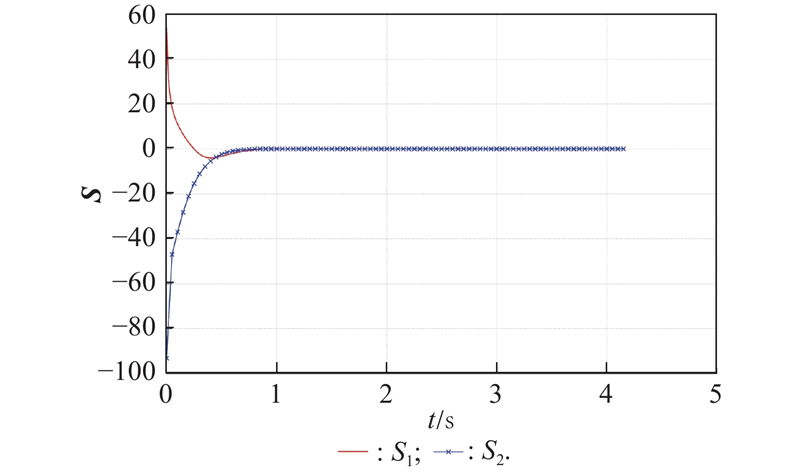
Fig 14
Accelerations for the attacker"
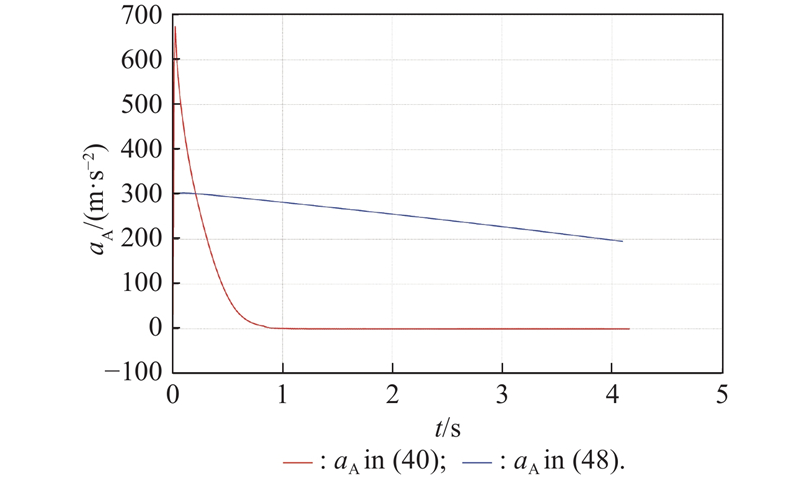
Fig 15
Accelerations for the protector"
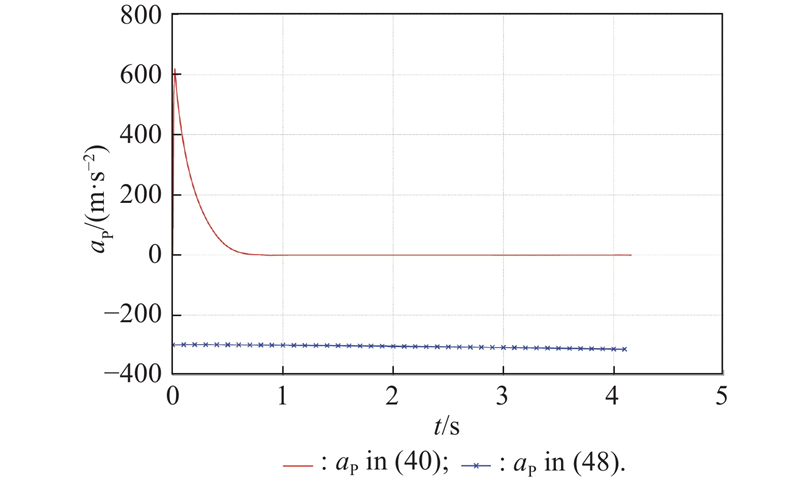
Fig 16
Accelerations for the target"
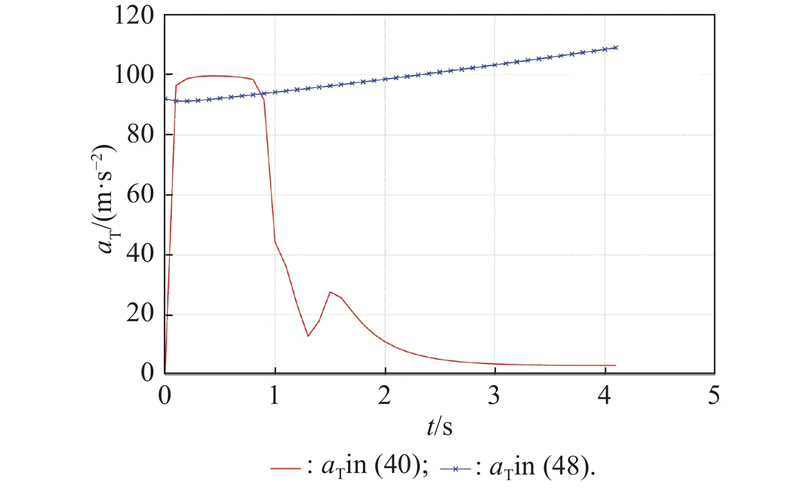
Fig 17
Accelerations for the defender"
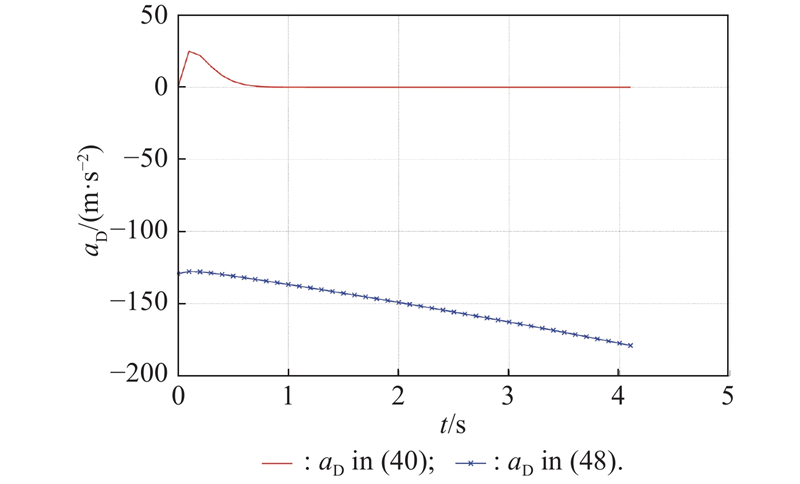

Fig 18
ZEMs among the players"
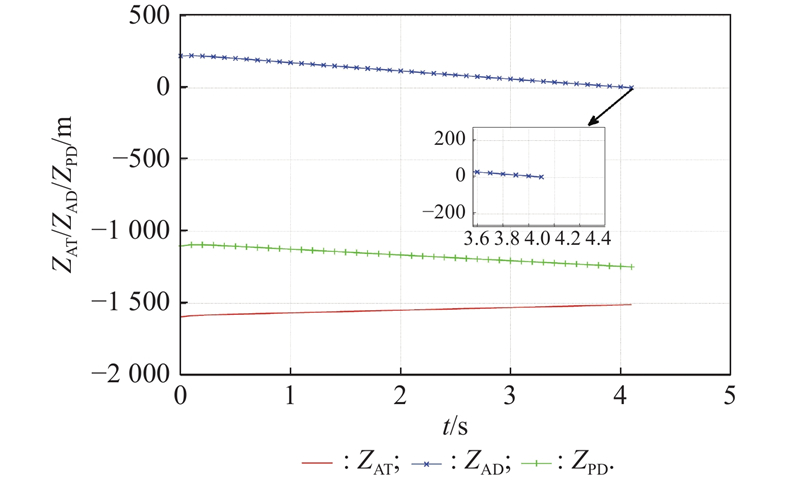
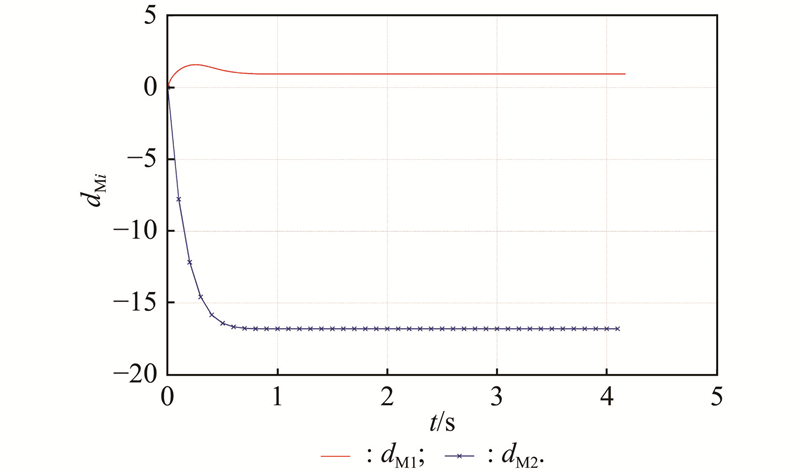
Fig 19
Time evolution of adaptive gain term"
| 1 |
SREEJA S, HABLANI H B Precision munition guidance and moving-target estimation. Journal of Guidance, Control, and Dynamics, 2016, 39 (9): 2100- 2111.
doi: 10.2514/1.G000382 |
| 2 | SHARMA M, LAVRETSKY E. Application and flight testing of an adaptive autopilot on precision guided munitions. Proc. of the AIAA Guidance, Navigation, and Control Conference and Exhibit, 2006: 21−24. |
| 3 |
ZENG J, DOU L H, XIN B Cooperative salvo attack using guidance law of multiple missiles. Journal of Advanced Computational Intelligence and Intelligent Informatics, 2015, 19 (2): 301- 306.
doi: 10.20965/jaciii.2015.p0301 |
| 4 | WEISS M, SHIMA T, CASTANEDA D, et al Combined and cooperative minimum-effort guidance algorithms in an active aircraft defense scenario. Journal of Guidance, Control, and Dynamics, 2017, 40 (5): 1241- 1254. |
| 5 | KUMAR S R, MUKHERJEE D Cooperative salvo guidance using finite-time consensus over directed cycles. IEEE Trans. on Aerospace and Electronic Systems, 2020, 52 (2): 1504- 1514. |
| 6 |
MUKHERJEE D, KUMAR S R Field-of-view constrained impact time guidance against stationary targets. IEEE Trans. on Aerospace and Electronic Systems, 2021, 57 (5): 3296- 3306.
doi: 10.1109/TAES.2021.3074202 |
| 7 |
WANG C Y, DONG W, WANG J N, et al Impact-angle-constrained cooperative guidance for salvo attack. Journal of Guidance, Control, and Dynamics, 2022, 45 (4): 684- 703.
doi: 10.2514/1.G006342 |
| 8 |
LIU D F, JI Y, WANG W, et al Three-dimensional impact angle-constrained adaptive guidance law considering autopilot lag and input saturation. International Journal of Robust and Nonlinear Control, 2020, 30 (9): 3653- 3671.
doi: 10.1002/rnc.4955 |
| 9 |
HE S M, WANG W, LIN D F, et al Consensus-based two-stage salvo attack guidance. IEEE Trans. on Aerospace and Electronic Systems, 2018, 54 (3): 1555- 1566.
doi: 10.1109/TAES.2017.2773272 |
| 10 | GUO J G, WANG X M, ZHOU J. Efficient information-based cooperative guidance law of multi-missiles. Transactions of the Institute of Measurement and Control, 2019, 41(9): 2651−2665. |
| 11 |
HE S, KIM M, SONG T, et al Three-dimensional salvo attack guidance considering communication delay. Aerospace Science and Technology, 2018, 73, 1- 9.
doi: 10.1016/j.ast.2017.11.019 |
| 12 | YANG X Y, SONG S M Three-dimensional consensus algorithm for nonsingular distributed cooperative guidance strategy. Aerospace Science and Technology, 2021, 118 |
| 13 |
DONG W, WANG C Y, WANG J N, et al Three-dimensional nonsingular cooperative guidance law with different field-of-view constraints. Journal of Guidance, Control, and Dynamics, 2021, 44 (11): 2001- 2015.
doi: 10.2514/1.G005971 |
| 14 |
CHEN Y D, GUO D Q, WANG J J, et al Cooperative circular guidance with nonuniform field-of-view constraints. Journal of Guidance, Control, and Dynamics, 2022, 45 (8): 1435- 1450.
doi: 10.2514/1.G006470 |
| 15 |
LI G F, LI S T, LI B H, et al Deep reinforcement learning guidance with impact time control. Journal of Systems Engineering and Electronics, 2024, 35 (6): 1594- 1603.
doi: 10.23919/JSEE.2021.000038 |
| 16 |
GAO M J, YAN T, HAN B J, et al Cooperative guidance law based on super-twisting observer for target maneuvering. Journal of Systems Engineering and Electronics, 2024, 35 (5): 1304- 1314.
doi: 10.23919/JSEE.2024.000102 |
| 17 |
ZHOU J P, ZHANG W J, ZHOU H, et al Design of integral sliding mode guidance law based on disturbance observer. Journal of Systems Engineering and Electronics, 2024, 33 (1): 186- 194.
doi: 10.23919/JSEE.2022.000020 |
| 18 | BOYELL R L Defending a moving target against missile or torpedo attack. IEEE Trans. on Aerospace and Electronic Systems, 1976, 12 (4): 522- 526. |
| 19 | BRYSON A E, HO C Y. Applied optimal control. London: Blaisdell Publishing Company, 1969. |
| 20 | ISAACS R. Differential games: a mathematical theory with applications to warfare and pursuit, control and optimization. New York: Wiley, 1965. |
| 21 |
PERELMAN A, SHIMA T, RUSNAK I Cooperative differential games strategies for active aircraft protection from a homing missile. Journal of Guidance, Control, and Dynamics, 2011, 34 (3): 761- 773.
doi: 10.2514/1.51611 |
| 22 |
PROKOPOV O, SHIMA T Linear quadratic optimal cooperative strategies for active aircraft protection. Journal of Guidance, Control, and Dynamics, 2013, 36 (3): 753- 764.
doi: 10.2514/1.58531 |
| 23 |
SHAFERMAN V, SHIMA T Cooperative optimal guidance laws for imposing a relative intercept angle. Journal of Guidance, Control, and Dynamics, 2015, 38 (8): 1395- 1408.
doi: 10.2514/1.G000568 |
| 24 |
SHAFERMAN V, SHIMA T Cooperative differential games guidance laws for imposing a relative intercept angle. Journal of Guidance, Control, and Dynamics, 2017, 40 (10): 2465- 2480.
doi: 10.2514/1.G002594 |
| 25 |
LIANG H Z, WANG J Y, WANG Y H, et al Optimal guidance against active defense ballistic missiles via differential game strategies. Chinese Journal of Aeronautics, 2020, 33 (3): 978- 989.
doi: 10.1016/j.cja.2019.12.009 |
| 26 | LIANG H Z, LI Z, WU J Z, et al Optimal guidance laws for a hypersonic multiplayer pursuit-evasion game based on a differential game strategy. Aerospace, 2022, 9 (2) |
| 27 | SHALUMOV V Cooperative online guide-launch-guide policy in a target-missile-defender engagement using deep reinforcement learning. Aerospace Science and Technology, 2020, 104 |
| 28 |
LIU F, DONG X W, LI Q D, et al Cooperative differential games guidance strategies for multiple attackers against an active defense target. Chinese Journal of Aeronautics, 2022, 35 (5): 374- 389.
doi: 10.1016/j.cja.2021.07.033 |
| 29 | SHALUMOV V. Inter-agent distance control in a cooperative multi-agent target-missile-defender engagement. IEEE Trans. on Control of Network Systems, 2022, 9(3): 1294–1304. |
| 30 | LUO H B, TAN G Y, YAN H, et al Cooperative line-of-sight guidance with optimal evasion strategy for three-body confrontation. ISA Transactions, 2022, 133, 262- 272. |
| 31 |
LUO H B, JI H B, WANG X H Cooperative robust line-of-sight guidance law based on high-gain observers for active defense. International Journal of Robust and Nonlinear Control, 2023, 33 (16): 9602- 9617.
doi: 10.1002/rnc.6877 |
| 32 |
KUMAR S, SHIMA T Cooperative nonlinear guidance strategies for aircraft defense. Journal of Guidance, Control, and Dynamics, 2017, 40 (1): 124- 138.
doi: 10.2514/1.G000659 |
| 33 |
KUMAR S, DWAIPAYAN M Cooperative active aircraft protection guidance using line-of-sight approach. IEEE Trans. on Aerospace and Electronic Systems, 2021, 57 (2): 957- 967.
doi: 10.1109/TAES.2020.3046328 |
| 34 | KUMAR S, DWAIPAYAN M. Cooperative guidance strategies for active aircraft protection. Proc. of the American Control Conference, 2019: 4641–4646. |
| 35 |
ZHUANG M L, TAN L G, LI K H, et al Fixed-time position coordinated tracking control for spacecraft formation flying with collision avoidance. Chinese Journal of Aeronautics, 2021, 34 (11): 182- 199.
doi: 10.1016/j.cja.2020.12.024 |
| 36 |
TAN Z W, FONOD R, SHIMA T Cooperative guidance law for target pair to lure two pursuers into collision. Journal of Guidance, Control, and Dynamics, 2018, 41 (8): 1687- 1699.
doi: 10.2514/1.G003357 |
| 37 |
MANOHARAN A, SUJIT P B NMPC-based cooperative strategy to lure two attackers into collision by two targets. IEEE Control Systems Letters, 2023, 7, 496- 501.
doi: 10.1109/LCSYS.2022.3195819 |
| 38 | LIANG H Z, WANG J Y, LIU J Q, et al Guidance strategies for interceptor against active defense spacecraft in two-on-two engagement. Aerospace Science and Technology, 2020, 96 |
| 39 |
QI N M, SUN Q L, ZHAO J Evasion and pursuit guidance law against defended target. Chinese Journal of Aeronautics, 2017, 30 (6): 1958- 1973.
doi: 10.1016/j.cja.2017.06.015 |
| 40 |
YAO Q J Adaptive finite-time sliding mode control design for finite-time fault-tolerant trajectory tracking of marine vehicles with input saturation. Journal of the Franklin Institute, 2020, 357, 13593- 13619.
doi: 10.1016/j.jfranklin.2020.10.015 |
| 41 |
CORRADINI M L, CRISTOFARO A Nonsingular terminal sliding-mode control of nonlinear planar systems with global fixed-time stability guarantees. Automatica, 2018, 95, 561- 565.
doi: 10.1016/j.automatica.2018.06.032 |
| 42 |
SHIMA T, IDAN M, GOLAN O M Sliding-mode control for integrated missile autopilot guidance. Journal of Guidance, Control, and Dynamics, 2006, 29 (2): 250- 260.
doi: 10.2514/1.14951 |
| 43 |
WALLSGROVE R, AKELLA M R Globally stabilizing saturated attitude control in the presence of bounded unknown disturbances. Journal of Guidance, Control, and Dynamics, 2005, 28 (5): 957- 963.
doi: 10.2514/1.9980 |
| 44 |
POLYAKOV A Nonlinear feedback design for fixed-time stabilization of linear control systems. IEEE Trans. on Automatic Control, 2012, 57 (8): 2106- 2110.
doi: 10.1109/TAC.2011.2179869 |
| [1] | Enjiao ZHAO, Xue DING, Ke ZHANG, Zengyu YUAN. Fixed-time cooperative interception guidance law with angle constraints for multiple flight vehicles [J]. Journal of Systems Engineering and Electronics, 2025, 36(2): 569-579. |
| [2] | Mengjing GAO, Tian YAN, Bingjie HAN, Haoyu CHENG, Wenxing FU, Bo HAN. Cooperative guidance law based on super-twisting observer for target maneuvering [J]. Journal of Systems Engineering and Electronics, 2024, 35(5): 1304-1314. |
| [3] | Qingrui MENG, Yan LIN. Adaptive admittance tracking control for interactive robot with prescribed performance [J]. Journal of Systems Engineering and Electronics, 2024, 35(2): 444-450. |
| [4] | Dakai LIU, Sven ESCHE. Revised barrier function-based adaptive finite- and fixed-time convergence super-twisting control [J]. Journal of Systems Engineering and Electronics, 2023, 34(3): 775-782. |
| [5] | Hua CHEN, Chao SHEN, Jiahui HUANG, Yuhan CAO. Event-triggered model-free adaptive control for a class of surface vessels with time-delay and external disturbance via state observer [J]. Journal of Systems Engineering and Electronics, 2023, 34(3): 783-797. |
| [6] | Fan WANG, Pengfei FAN, Yonghua FAN, Bin XU, Jie YAN. Robust adaptive control of hypersonic vehicle considering inlet unstart [J]. Journal of Systems Engineering and Electronics, 2022, 33(1): 188-196. |
| [7] |
Zhaoying LI, Shuai SHI, Hao LIU.
Trajectory tracking of tail-sitter aircraft by |
| [8] | Fuhui GUO, Pingli LU. Fast self-adapting high-order sliding mode control for a class of uncertain nonlinear systems [J]. Journal of Systems Engineering and Electronics, 2021, 32(3): 690-699. |
| [9] | Wei LI, Qiuqiu WEN, Lei HE, Qunli XIA. Three-dimensional impact angle constrained distributed cooperative guidance law for anti-ship missiles [J]. Journal of Systems Engineering and Electronics, 2021, 32(2): 447-459. |
| [10] | Biao YANG, Wuxing JING, Changsheng GAO. Three-dimensional cooperative guidance law for multiple missiles with impact angle constraint [J]. Journal of Systems Engineering and Electronics, 2020, 31(6): 1286-1296. |
| [11] | Yang LI, Mingyong LIU, Xiaojian ZHANG, Xingguang PENG. Global approximation based adaptive RBF neural network control for supercavitating vehicles [J]. Journal of Systems Engineering and Electronics, 2018, 29(4): 797-804. |
| [12] | Ri Liu, Xiuxia Sun, Wenhan Dong, and Dong Wang. Finite-time adaptive sliding mode control for heavyweight airdrop operations [J]. Systems Engineering and Electronics, 2017, 28(2): 338-346. |
| [13] | Jiaoru Huang, Fucai Qian, Guo Xie, and Hengzhan Yang. Robust adaptive control for dynamic systems with mixed uncertainties [J]. Systems Engineering and Electronics, 2016, 27(3): 656-663. |
| [14] | Xuemei Zheng, Peng Li, Haoyu Li, and Danmei Ding. Adaptive backstepping-based NTSM control for unmatched uncertain nonlinear systems [J]. Systems Engineering and Electronics, 2015, 26(3): 557-564. |
| [15] | Yong Guo, Shenmin Song, and Liwei Deng. Finite-time coordination control for formation flying spacecraft [J]. Journal of Systems Engineering and Electronics, 2014, 25(5): 859-867. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||