
Journal of Systems Engineering and Electronics ›› 2026, Vol. 37 ›› Issue (1): 26-35.doi: 10.23919/JSEE.2026.000012
• PERCEPTION, CONTROL, AND DECISION-MAKING OF EMBODIED INTELLIGENT SYSTEMS • Previous Articles Next Articles
Kaisheng WANG( ), Yanyan HUANG(), Jinxi TAN(), Wenjie ZHAI()
), Yanyan HUANG(), Jinxi TAN(), Wenjie ZHAI()
Received:2025-11-10
Online:2026-02-18
Published:2026-03-09
Contact:
Yanyan HUANG
E-mail:cauchy1220@njust.edu.cn;huangyy@njust.edu.cn;tanjinxi@njust.edu.cn;15633691362@163.com
About author:Supported by:Kaisheng WANG, Yanyan HUANG, Jinxi TAN, Wenjie ZHAI. Research on unmanned swarm scheduling strategies for mountain obstacle-breaching missions[J]. Journal of Systems Engineering and Electronics, 2026, 37(1): 26-35.
Add to citation manager EndNote|Reference Manager|ProCite|BibTeX|RefWorks
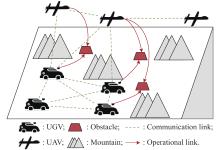
Fig 1
Description diagram of obstacle breaching operations by unmanned swarm"
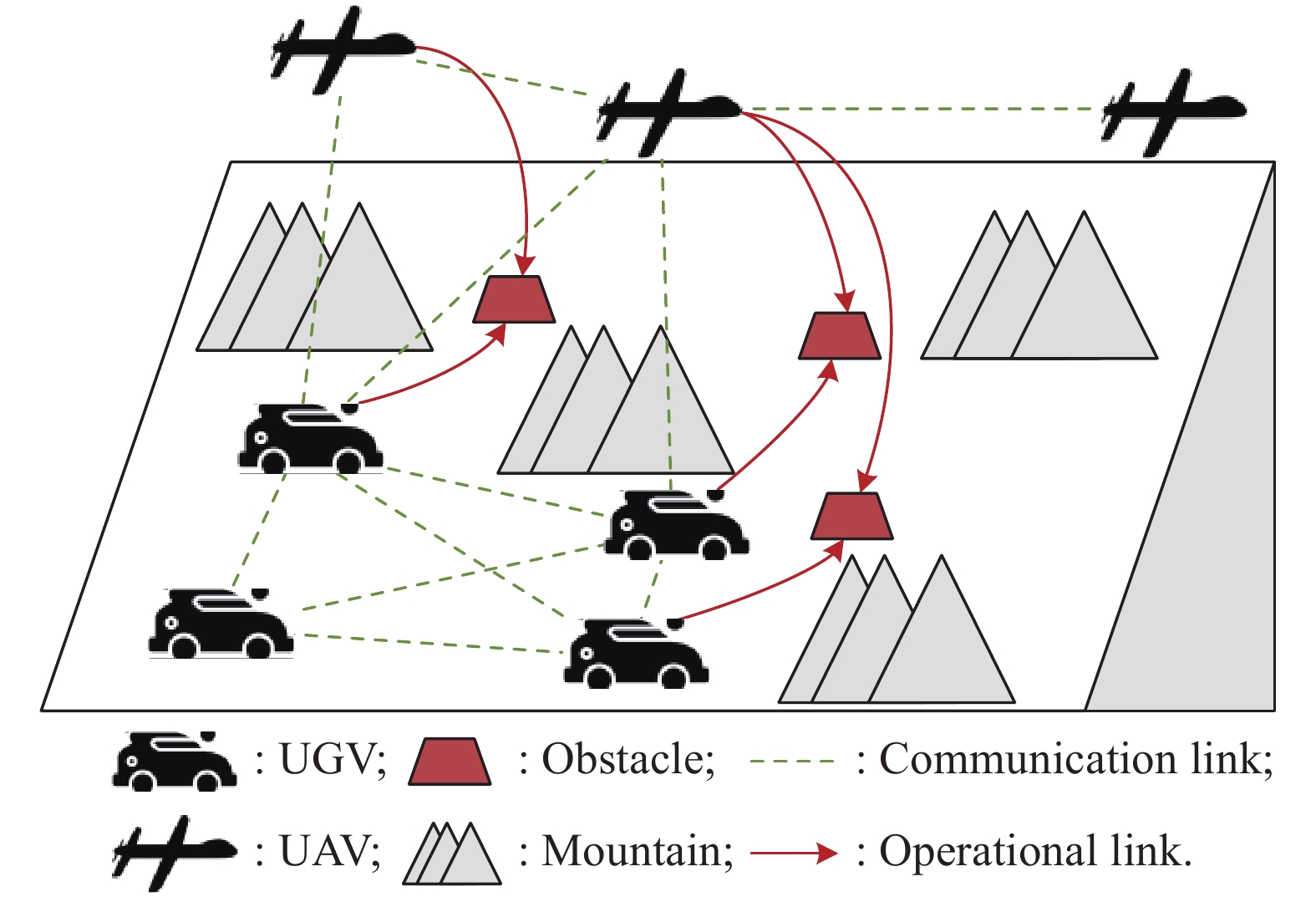

Fig 2
MTDARS diagram"
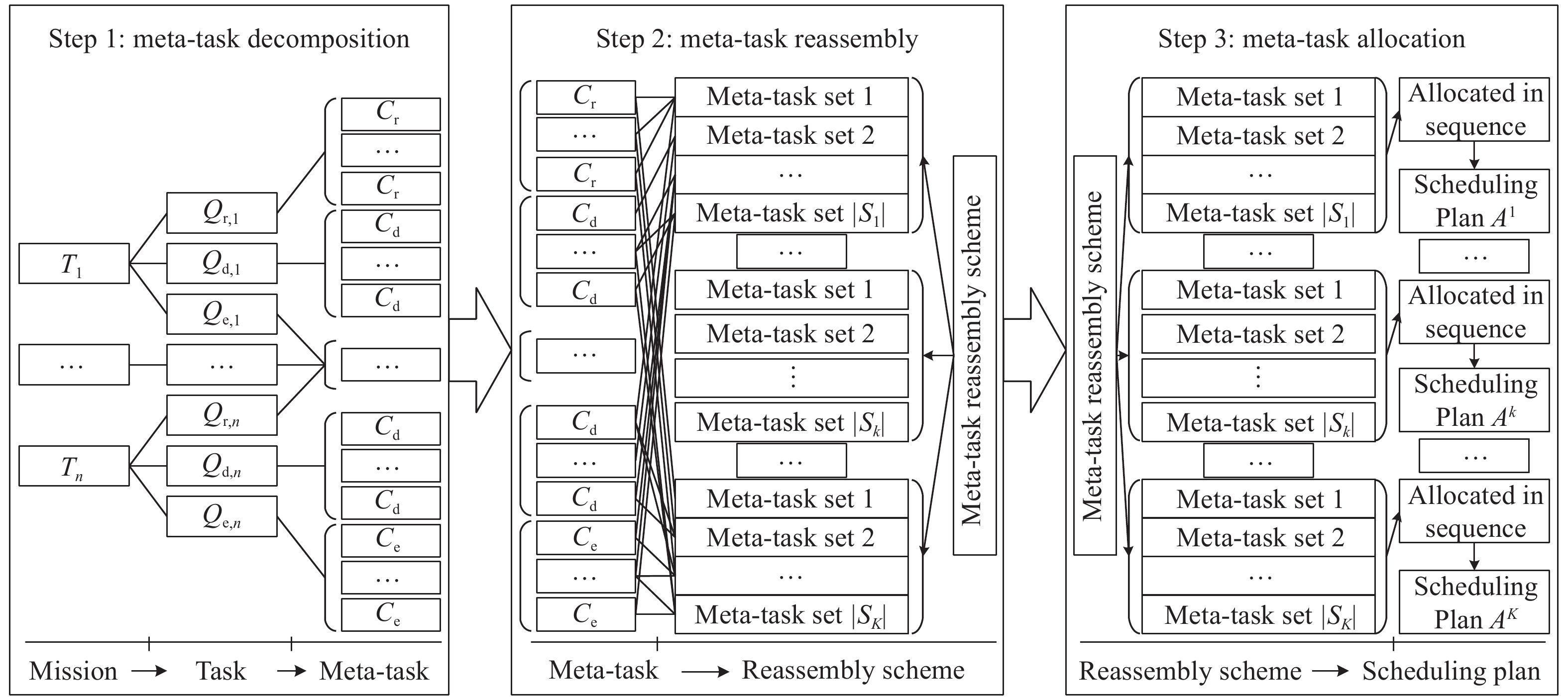
Fig 3
Overall process of model solving"
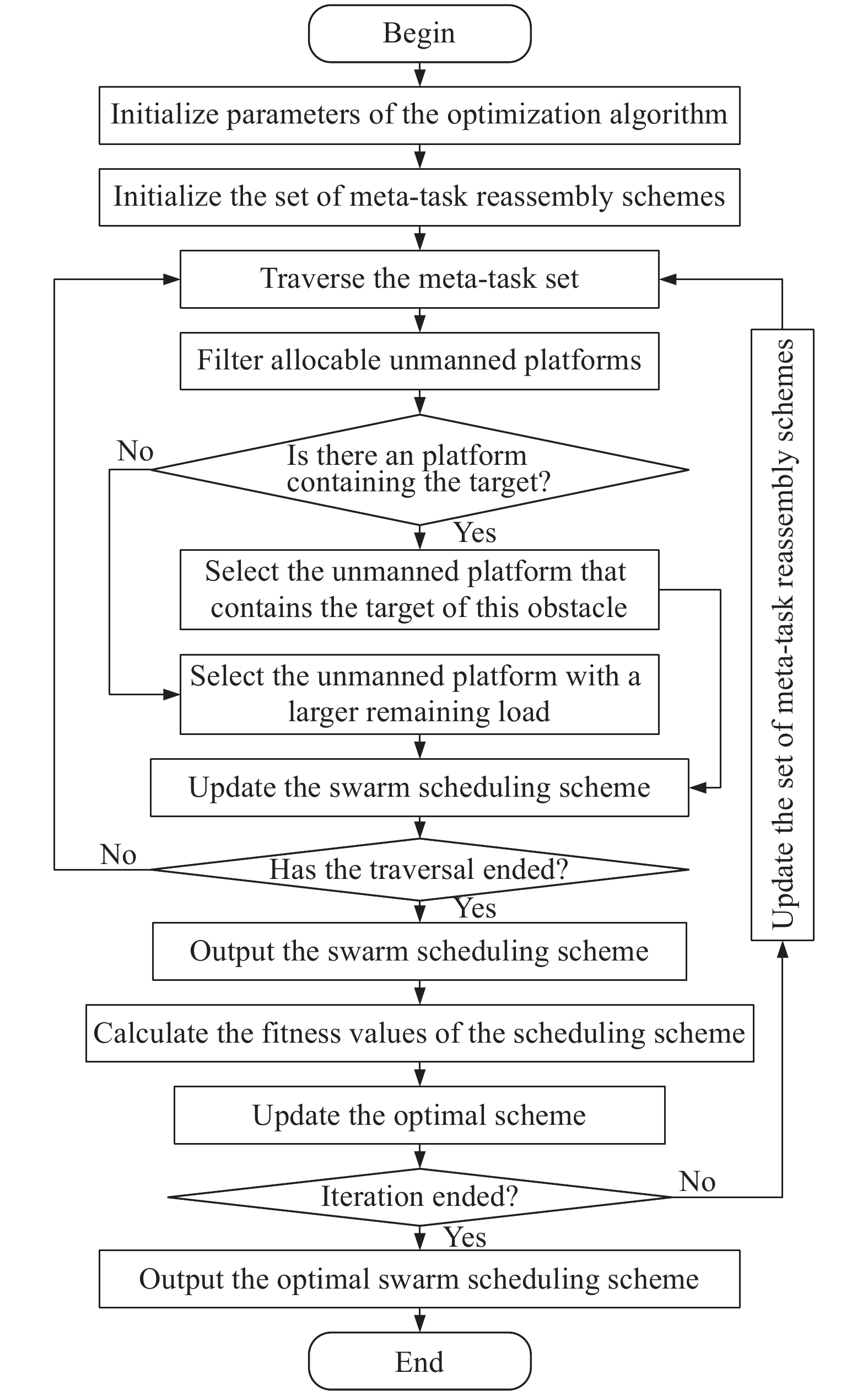
Table 1
Information on unmanned swarm"
| Parameter | Value |
| Number of reconnaissance UAVs | 3 |
| Number of UGVs | 3 |
| Number of integrated UAVs | 4 |
| Maneuvering speed of UAVs/(km/h) | 120 |
| Maneuvering speed of UGVs/(km/h) | 80 |
| Reconnaissance radius of UAVs/km | 10 |
| Obstacle-breaching radius of UAVs/km | 10 |
| Obstacle-breaching radius of UGVs/km | 10 |
| Sensing payload of reconnaissance UAVs | 15 |
| Munition payload of UGVs/pieces | 6 |
| Sensing payload of integrated UAVs/times | 15 |
| Munition payload of integrated UAVs/pieces | 6 |
| Time consumed for reconnaissance/min | 5 |
| Time consumed for destruction/min | 5 |
| Time consumed for assessment/min | 5 |
Table 2
Target information table"
| ID | Position | Qr | Qd | Qe | v | o |
| 1 | (57,69) | 3 | 4 | 3 | 15 | 0.93 |
| 2 | (38,59) | 3 | 2 | 4 | 11 | 0.53 |
| 3 | (59,58) | 1 | 2 | 1 | 15 | 0.67 |
| 4 | (72,61) | 1 | 3 | 1 | 11 | 0.92 |
| 5 | (64,63) | 3 | 2 | 2 | 14 | 0.14 |
| 6 | (60,57) | 3 | 1 | 2 | 10 | 0.14 |
| 7 | (80,76) | 2 | 3 | 3 | 11 | 0.35 |
| 8 | (61,50) | 4 | 2 | 1 | 12 | 0.68 |
| 9 | (41,50) | 3 | 1 | 2 | 10 | 0.44 |
| 10 | (47,52) | 4 | 4 | 4 | 13 | 0.07 |
| 11 | (99,61) | 2 | 1 | 1 | 10 | 0.11 |
| 12 | (56,48) | 2 | 2 | 4 | 14 | 0.35 |
| 13 | (85,60) | 4 | 2 | 4 | 11 | 0.8 |
| 14 | (69,64) | 2 | 4 | 4 | 11 | 0.48 |
| 15 | (55,40) | 3 | 2 | 1 | 15 | 0.54 |
| 16 | (53,72) | 4 | 3 | 1 | 14 | 0.48 |
| 17 | (57,53) | 2 | 4 | 4 | 12 | 0.95 |
| 18 | (71,40) | 4 | 1 | 3 | 12 | 0.02 |
| 19 | (70,54) | 2 | 4 | 4 | 15 | 0.7 |
| 20 | (45,60) | 3 | 2 | 2 | 12 | 0.06 |
Fig 4
Algorithm convergence comparison chart"
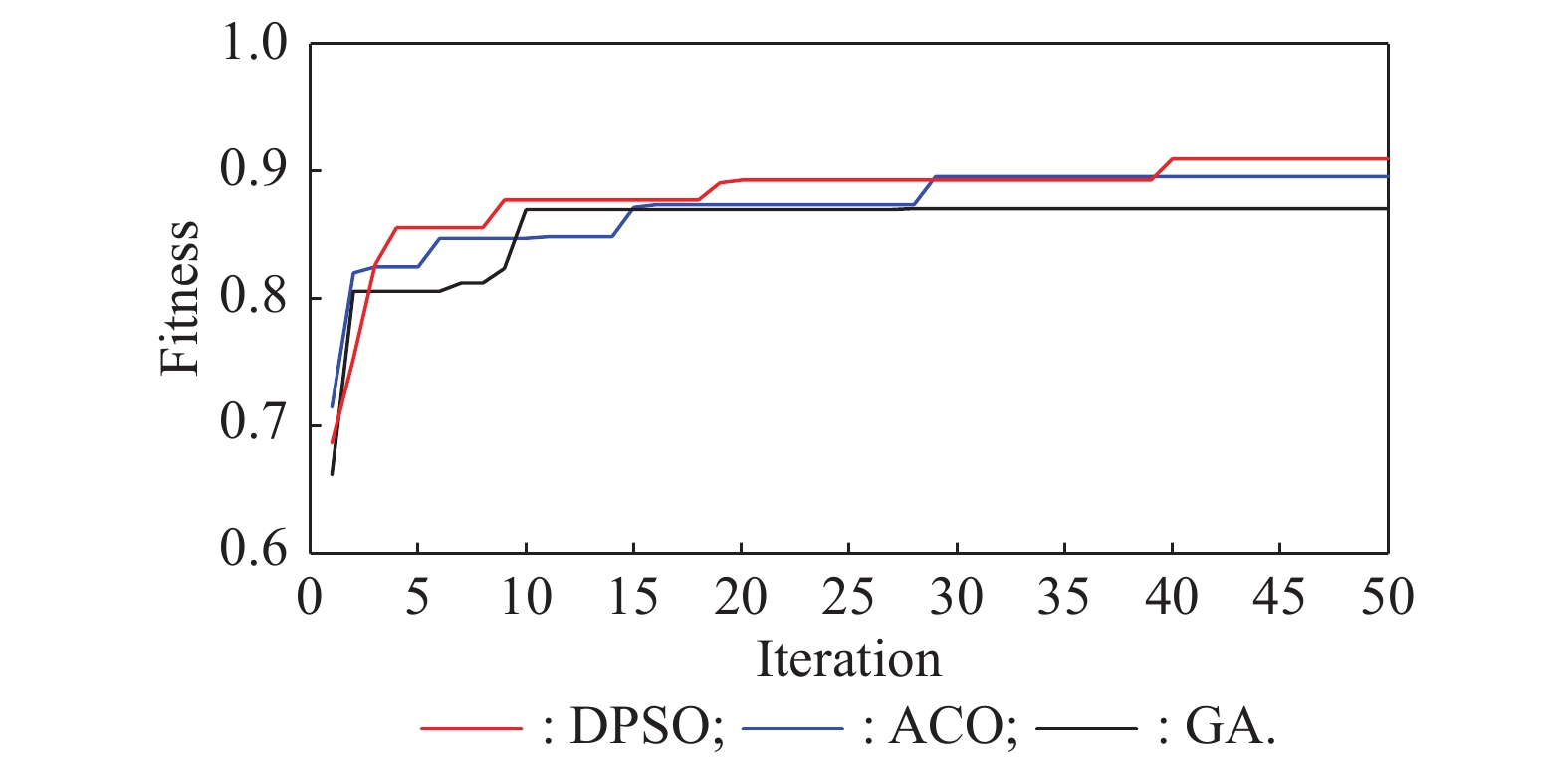
Table 3
Meta-task reassembly schemes"
| T | R1 | R2 | R3 | R4 | R5 | R6 | R7 | R8 | R9 | R10 | R11 |
| T1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 3 | 2 | 1 | 4 |
| T2 | 2 | 0 | 0 | 3 | 0 | 2 | 0 | 0 | 0 | 0 | 2 |
| T3 | 3 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| T4 | 4 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| T5 | 2 | 0 | 3 | 0 | 1 | 1 | 0 | 0 | 0 | 0 | 0 |
| T6 | 0 | 6 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| T7 | 0 | 1 | 4 | 0 | 3 | 0 | 0 | 0 | 0 | 0 | 0 |
| T8 | 7 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| T9 | 2 | 4 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| T10 | 7 | 0 | 0 | 5 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| T11 | 3 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| T12 | 8 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| T13 | 1 | 5 | 1 | 3 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| T14 | 0 | 0 | 0 | 0 | 10 | 0 | 0 | 0 | 0 | 0 | 0 |
| T15 | 0 | 1 | 0 | 2 | 3 | 0 | 0 | 0 | 0 | 0 | 0 |
| T16 | 0 | 8 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| T17 | 0 | 0 | 0 | 0 | 0 | 1 | 4 | 0 | 2 | 1 | 2 |
| T18 | 0 | 8 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| T19 | 10 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| T20 | 7 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
Table 4
Swarm scheduling schemes"
| m | TS | IT | Qt | m | TS | IT | Qt | |||
| 1 | 23.4 | 2 | 1 | 3 | 7 | 74.6 | 12 | 2 | 2 | |
| 54.1 | 13 | 1 | 4 | 84.7 | 19 | 2 | 4 | |||
| 82.5 | 6 | 1 | 3 | 89.7 | 19 | 3 | 4 | |||
| 102 | 6 | 3 | 2 | 113 | 5 | 3 | 2 | |||
| 121 | 13 | 3 | 3 | 62.9 | 17 | 1 | 2 | |||
| 2 | 27.6 | 3 | 1 | 1 | 8 | 26.3 | 8 | 1 | 4 | |
| 45.9 | 11 | 1 | 2 | 91.3 | 8 | 2 | 2 | |||
| 64 | 7 | 1 | 2 | 118 | 8 | 3 | 1 | |||
| 88.6 | 15 | 1 | 1 | 101 | 5 | 2 | 2 | |||
| 99 | 18 | 1 | 4 | 50.2 | 15 | 1 | 2 | |||
| 131 | 11 | 3 | 1 | 132 | 13 | 3 | 1 | |||
| 147 | 18 | 3 | 3 | 107 | 14 | 2 | 2 | |||
| 170 | 3 | 3 | 1 | 142 | 7 | 3 | 3 | |||
| 3 | 31.5 | 4 | 1 | 1 | 172 | 15 | 3 | 1 | ||
| 43.3 | 12 | 1 | 2 | 69.9 | 1 | 1 | 3 | |||
| 79.6 | 12 | 3 | 4 | 9 | 21.6 | 9 | 1 | 3 | ||
| 106 | 4 | 3 | 1 | 40.1 | 20 | 1 | 3 | |||
| 60.2 | 14 | 1 | 2 | 55.1 | 20 | 2 | 2 | |||
| 113 | 14 | 3 | 4 | 106 | 20 | 3 | 2 | |||
| 4 | 32.6 | 3 | 2 | 2 | 63.7 | 9 | 2 | 1 | ||
| 74.1 | 13 | 2 | 2 | 120 | 9 | 3 | 2 | |||
| 84.6 | 14 | 2 | 2 | 70.8 | 10 | 2 | 1 | |||
| 5 | 36.5 | 4 | 2 | 3 | 93.6 | 15 | 2 | 2 | ||
| 74 | 7 | 2 | 3 | 142 | 2 | 3 | 4 | |||
| 6 | 55.9 | 11 | 2 | 1 | 10 | 23.4 | 10 | 1 | 4 | |
| 97.5 | 6 | 2 | 1 | 77.3 | 10 | 2 | 3 | |||
| 119 | 18 | 2 | 1 | 50.3 | 16 | 1 | 4 | |||
| 137 | 2 | 2 | 2 | 89.2 | 16 | 2 | 3 | |||
| 148 | 17 | 2 | 1 | 94.2 | 16 | 3 | 1 | |||
| 7 | 29.9 | 5 | 1 | 3 | 106 | 10 | 3 | 4 | ||
| 48.5 | 19 | 1 | 2 | − | − | − | − | − |
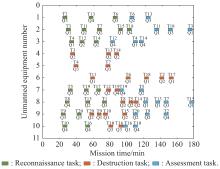
Fig 5
Scheduling scheme diagram under MTDARS"
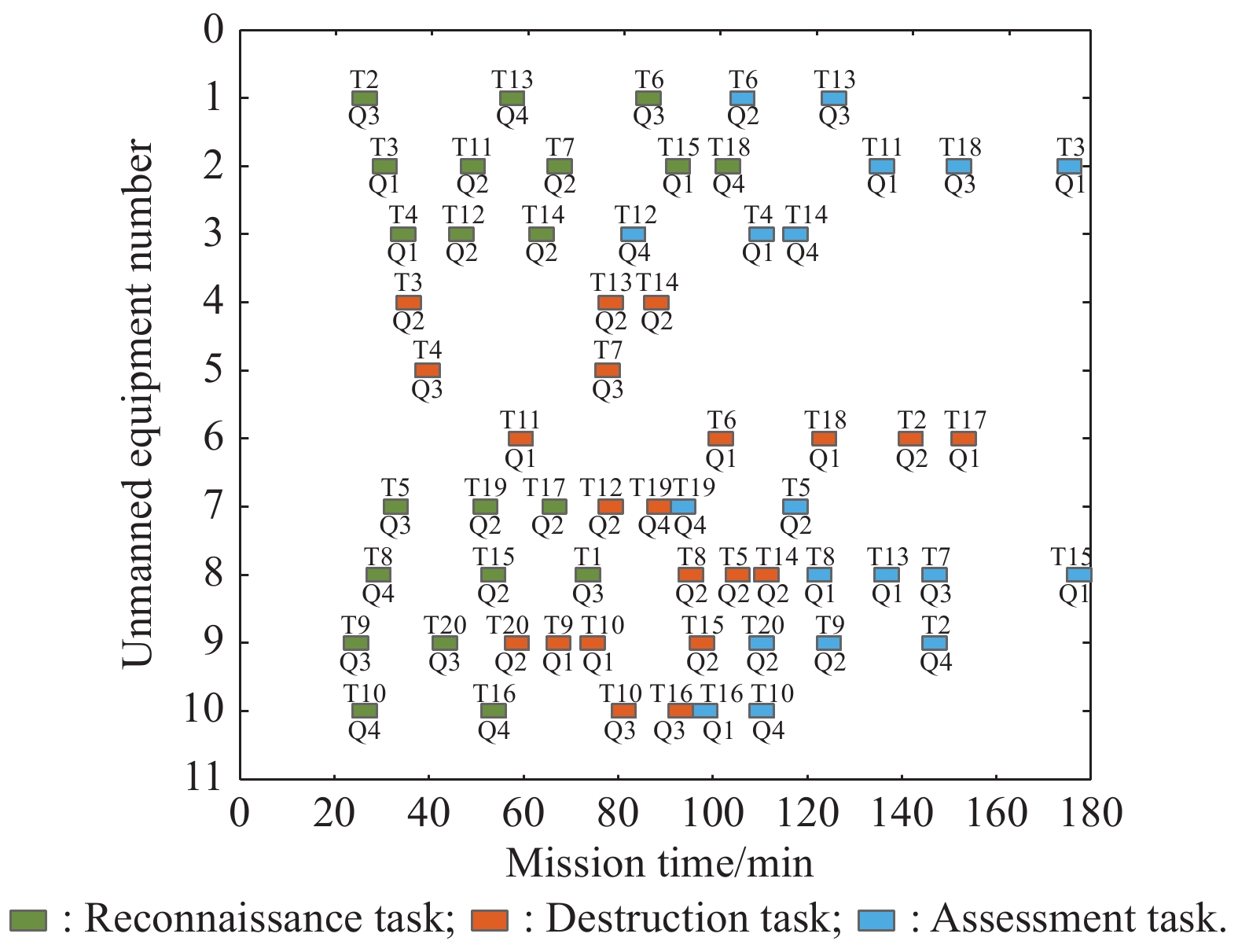
Table 5
Status of obstacle targets"
| IT | MT | MC | MR | IT | MT | MC | MR | |
| 1 | 10 | 3 | 7 | 11 | 4 | 4 | 0 | |
| 2 | 9 | 9 | 0 | 12 | 8 | 8 | 0 | |
| 3 | 4 | 4 | 0 | 13 | 10 | 10 | 0 | |
| 4 | 5 | 5 | 0 | 14 | 10 | 10 | 0 | |
| 5 | 7 | 7 | 0 | 15 | 6 | 6 | 0 | |
| 6 | 6 | 6 | 0 | 16 | 8 | 8 | 0 | |
| 7 | 8 | 8 | 0 | 17 | 10 | 3 | 7 | |
| 8 | 7 | 7 | 0 | 18 | 8 | 8 | 0 | |
| 9 | 6 | 6 | 0 | 19 | 10 | 10 | 0 | |
| 10 | 12 | 12 | 0 | 20 | 7 | 7 | 0 |
Fig 6
Scheduling scheme diagram under CS"
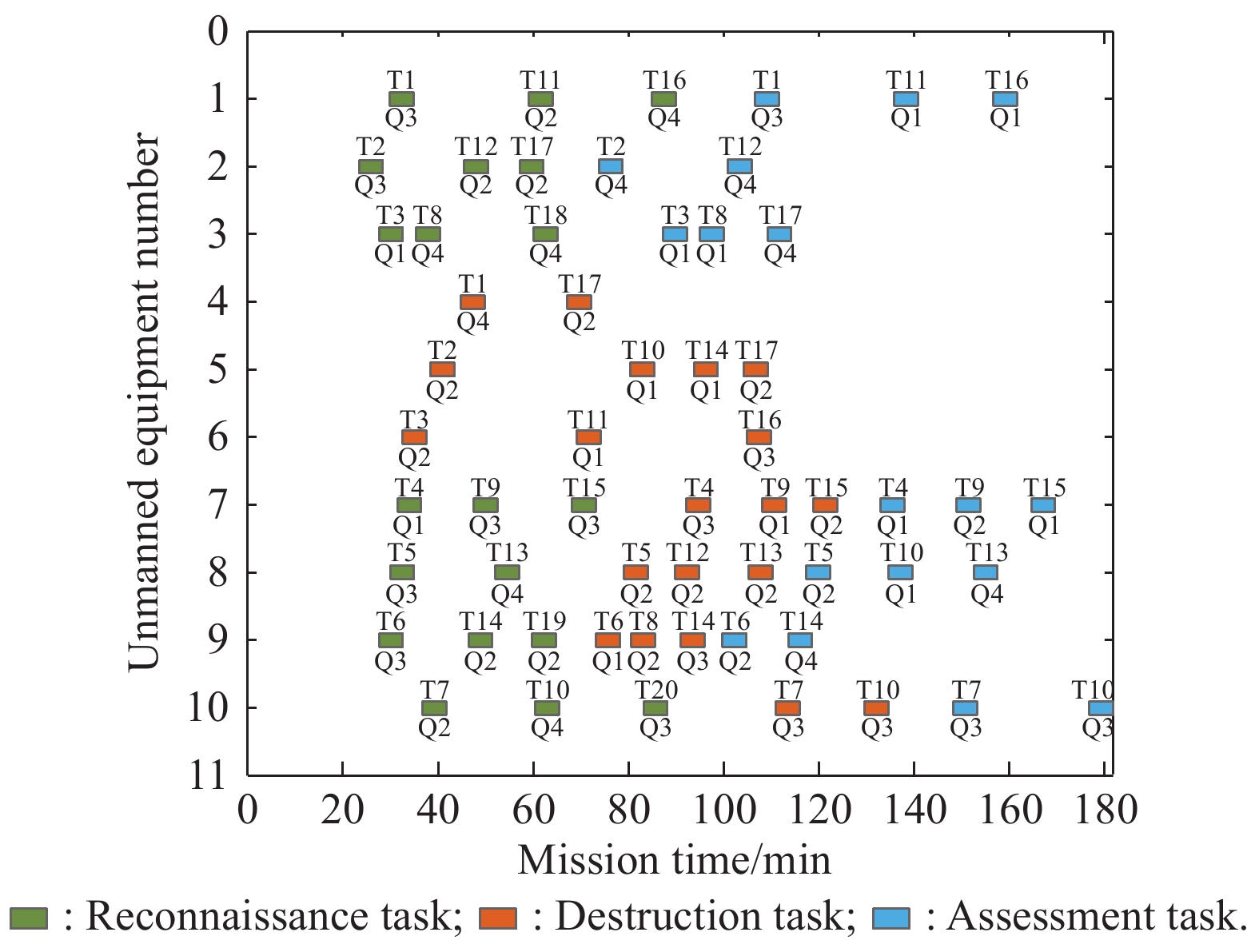
Table 6
Status of obstacle targets"
| IT | MT | MC | MR | IT | MT | MC | MR | |
| 1 | 10 | 10 | 0 | 11 | 4 | 4 | 0 | |
| 2 | 9 | 9 | 0 | 12 | 8 | 8 | 0 | |
| 3 | 4 | 4 | 0 | 13 | 10 | 10 | 0 | |
| 4 | 5 | 5 | 0 | 14 | 10 | 10 | 0 | |
| 5 | 7 | 7 | 0 | 15 | 6 | 6 | 0 | |
| 6 | 6 | 6 | 0 | 16 | 8 | 8 | 0 | |
| 7 | 8 | 8 | 0 | 17 | 10 | 10 | 0 | |
| 8 | 7 | 7 | 0 | 18 | 8 | 4 | 4 | |
| 9 | 6 | 6 | 0 | 19 | 10 | 2 | 8 | |
| 10 | 12 | 12 | 0 | 20 | 7 | 3 | 4 |
Table 7
Strategy comparison table"
| Strategy | FA | EA | TA/min |
| MTDARS | 0.9 | 144.5 | 176.7 |
| CS | 0.85 | 117.9 | 191.8 |
Table 8
Simulation result statistics table"
| Experiment | Strategy | FA | EA | TA/min |
| 1 | MTDARS | 0.9 | 139.1 | 192.77 |
| CS | 0.85 | 119.68 | 205.8 | |
| 2 | MTDARS | 0.9 | 142.58 | 187.62 |
| CS | 0.85 | 117.29 | 189.16 | |
| 3 | MTDARS | 0.9 | 144.68 | 178.77 |
| CS | 0.85 | 117.89 | 180.71 | |
| 4 | MTDARS | 0.9 | 144.25 | 176.03 |
| CS | 0.85 | 120.28 | 181.22 | |
| 5 | MTDARS | 0.7 | 122.39 | 145.03 |
| CS | 0.3 | 95.695 | 153.16 | |
| 6 | MTDARS | 1 | 145.09 | 191.36 |
| CS | 1 | 132.44 | 209.51 |
| 1 |
LUO Y L, JIANG X Q, ZHONG S C, et al Air-to-ground reconnaissance-attack task allocation for heterogeneous UAV swarm. Journal of Systems Engineering and Electronics, 2025, 36 (1): 155- 175.
doi: 10.23919/JSEE.2025.000012 |
| 2 | WANG K S, HUANG Y Y, SUN P Y, et al. Deployment planning of naval battlefield perception network for energy balance. Control Theory & Applications. https://link.cnki.net/urlid/44.1240.TP.20250424.1546.036. (in Chinese) |
| 3 |
LIU J, LIANG X L, LEI P F Capacity allocation strategy against cascading failure of complex network. Journal of Systems Engineering and Electronics, 2025, 35 (6): 1507- 1515.
doi: 10.23919/jsee.2024.000075 |
| 4 | HUANG Y Y, WANG K S, SHI Y A Research on an evaluation model for data link operational support capability based on networking index. Systems Engineering and Electronics, 2023, 45 (8): 2361- 2369. |
| 5 |
ZHANG X H, WANG Z, ZHANG D, et al Scheduling algorithm for two-workshop production with the time-selective strategy and backtracking strategy. Electronics, 2025, 11 (23): 4049- 4067.
doi: 10.3390/electronics11234049 |
| 6 |
LI W, WANG Y, JIA L J, et al Battlefield target intelligence system architecture modeling and system optimization. Journal of Systems Engineering and Electronics, 2024, 35 (5): 1190- 1210.
doi: 10.23919/JSEE.2024.000114 |
| 7 |
MU J S, ZHANG R H, CUI Y H, et al UAV meets integrated sensing and communication: challenges and future directions. IEEE Communications Magazine, 2023, 61 (5): 62- 67.
doi: 10.1109/MCOM.008.2200510 |
| 8 |
ZHAN G, ZHANG K, LI K, et al UAV maneuvering decision-making algorithm based on deep reinforcement learning under the guidance of expert experience. Journal of Systems Engineering and Electronics, 2024, 35 (3): 644- 665.
doi: 10.23919/jsee.2024.000022 |
| 9 | WANG K S, HUANG Y Y Multi-layer kill net operation planning technology for OODA chain optimization closed loop. Journal of Nanjing University of Science and Technology, 2024, 48 (5): 642- 649. |
| 10 |
DUAN T, WANG W P, WANG T, et al Role assignment mechanism of unmanned swarm organization reconstruction based on the fourth directed motif. Sensors, 2022, 22 (22): 8799- 8818.
doi: 10.3390/s22228799 |
| 11 |
TANG J, QIN W T, PAN Q T, et al A deep multimodal fusion and multitasking trajectory prediction model for typhoon trajectory prediction to reduce flight scheduling cancellation. Journal of Systems Engineering and Electronics, 2024, 35 (3): 666- 678.
doi: 10.23919/JSEE.2024.000042 |
| 12 | QI X G, ZHOU Y T, LIU L F Reliability assessment of ground combat missions for unmanned aerial vehicle swarms. Systems Engineering and Electronics, 2023, 45 (9): 2971- 2978. |
| 13 |
ZHOU T W, HE P C, DAI W B, et al Integrated recovery of air cargo transportation under various abnormal scenarios. European Journal of Operational Research, 2026, 329 (3): 864- 877.
doi: 10.1016/j.ejor.2025.08.037 |
| 14 |
JIA Z H, WU T F, ZHANG H, et al An energy-efficient scheduling approach for a two-stage hybrid flow shop with parallel batch machines. European Journal of Operational Research, 2026, 328 (3): 762- 784.
doi: 10.1016/j.ejor.2025.07.055 |
| 15 | XIE Z H, HE M, YU M G, et al Modeling and simulation of cooperative evolution in unmanned swarms for strategic diversity. Systems Engineering and Electronics, 2023, 45 (9): 2852- 2859. |
| 16 |
HU L Y, ZHANG Y L, WEN M Y, et al Robust parallel machine selection and scheduling with uncertain release times. European Journal of Operational Research, 2025, 327 (3): 838- 856.
doi: 10.1016/j.ejor.2025.05.032 |
| 17 |
JIN W C, KIM K, CHOI J W Adaptive beam control considering location inaccuracy for anti-UAV systems. IEEE Trans. on Vehicular Technology, 2024, 73 (2): 2320- 2331.
doi: 10.1109/TVT.2023.3320176 |
| 18 |
LIU K, ZHENG J UAV trajectory planning with interference awareness in UAV-enabled time-constrained data collection systems. IEEE Trans. on Vehicular Technology, 2024, 73 (2): 2799- 2815.
doi: 10.1109/TVT.2023.3320676 |
| 19 |
CHEN C L, LIN Y J, ZHAN L L, et al Dynamic obstacle avoidance approach based on integration of A-star and APF algorithms for vehicles in complex mountainous environments. Vehicles, 2025, 7 (3): 65- 78.
doi: 10.3390/vehicles7030065 |
| 20 |
PANG W J, MA X Y, LIANG X M, et al Role-based Bayesian decision framework for autonomous unmanned systems. Journal of Systems Engineering and Electronics, 2023, 34 (6): 1397- 1408.
doi: 10.23919/JSEE.2023.000114 |
| 21 |
SHAO L L, LIU J P, FU C Y, et al Alternative ranking in trust network group decision-making: a distributionally robust optimization method. European Journal of Operational Research, 2025, 327 (3): 986- 1002.
doi: 10.1016/j.ejor.2025.05.052 |
| 22 |
GUO F, LIANG J F, NIU R L, et al Robust optimization of a procurement and routing strategy for multiperiod multimodal transport in an uncertain environment. European Journal of Operational Research, 2025, 327 (1): 115- 135.
doi: 10.1016/j.ejor.2025.05.004 |
| 23 |
QIN Z Y, ZHANG L, CHI Y, et al Active obstacle avoidance of multi-rotor UAV swarm based on stress matrix formation method. Mathematics, 2025, 13 (1): 86- 111.
doi: 10.3390/math13010086 |
| 24 |
DONG N, LIU S, MAI X M Communication-efficient heterogeneous multi-UAV task allocation based on clustering. Computer Communications, 2025, 229 (1): 107986.
doi: 10.2139/ssrn.4855249 |
| 25 |
ZHANG Z Y, WU D, ZHANG F L, et al DECCo-A dynamic task scheduling framework for heterogeneous drone edge cluster. Drones, 2023, 7 (8): 513- 528.
doi: 10.3390/drones7080513 |
| 26 |
YANG J, HUANG X J A distributed algorithm for UAV cluster task assignment based on sensor network and mobile information. Applied Sciences, 2023, 13 (6): 3705- 3721.
doi: 10.3390/app13063705 |
| 27 |
DUAN T, WANG W P, WANG T, et al Dynamic tasks scheduling model of UAV cluster based on flexible network architecture. IEEE Access, 2020, 8, 115448- 115460.
doi: 10.1109/ACCESS.2020.3002594 |
| 28 |
ZHANG J L, HAN K, ZHANG P, et al A survey on joint-operation application for unmanned swarm formations under a complex confrontation environment. Journal of Systems Engineering and Electronics, 2023, 34 (6): 1432- 1446.
doi: 10.23919/JSEE.2023.000162 |
| 29 |
WANG C G, CHEN D H, LIAO W H, et al Autonomous obstacle avoidance strategies in the mission of large space debris removal using potential function. Advances in Space Research, 2023, 72 (7): 2860- 2873.
doi: 10.1016/j.asr.2022.04.013 |
| 30 |
BENJAMIN M R, DEFILIPPO M, ROBINETTE P, et al Obstacle avoidance using multiobjective optimization and a dynamic obstacle manager. IEEE Journal of Oceanic Engineering, 2019, 44 (2): 331- 342.
doi: 10.1109/JOE.2019.2896504 |
| [1] | Shibo ZHANG, Hongyuan GAO, Yumeng SU, Rongchen SUN. Physical-layer secure hybrid task scheduling and resource management for fog computing IoT networks [J]. Journal of Systems Engineering and Electronics, 2025, 36(5): 1146-1160. |
| [2] | Wei LIU, Yifeng JIN, Lei ZHANG, Zihe GAO, Ying TAO. Dynamic access task scheduling of LEO constellation based on space-based distributed computing [J]. Journal of Systems Engineering and Electronics, 2024, 35(4): 842-854. |
| [3] | Jialong ZHANG, Kun HAN, Pu ZHANG, Zhongxi HOU, Lei YE. A survey on joint-operation application for unmanned swarm formations under a complex confrontation environment [J]. Journal of Systems Engineering and Electronics, 2023, 34(6): 1432-1446. |
| [4] | Minggang YU, Yanjie NIU, Xueda LIU, Dongge ZHANG, Peng ZHENG, Ming HE, Ling LUO. Adaptive dynamic reconfiguration mechanism of unmanned swarm topology based on an evolutionary game [J]. Journal of Systems Engineering and Electronics, 2023, 34(3): 598-614. |
| [5] | Jian WU, Yuning CHEN, Yongming HE, Lining XING, Yangrui HU. Survey on autonomous task scheduling technology for Earth observation satellites [J]. Journal of Systems Engineering and Electronics, 2022, 33(6): 1176-1189. |
| [6] | Haowei ZHANG, Junwei XIE, Zhaojian ZHANG, Lei SHAO, Tangjun CHEN. Variable scheduling interval task scheduling for phased array radar [J]. Journal of Systems Engineering and Electronics, 2018, 29(5): 937-946. |
| [7] | Haowei ZHANG, Junwei XIE, Zhaojian ZHANG, Binfeng ZONG, Chuan SHENG. Pulse interleaving scheduling algorithm for digital array radar [J]. Journal of Systems Engineering and Electronics, 2018, 29(1): 67-73. |
| [8] | Aijun Liu, Michele Pfund, and John Fowler. Scheduling optimization of task allocation in integrated manufacturing system based on task decomposition [J]. Journal of Systems Engineering and Electronics, 2016, 27(2): 422-433. |
| [9] | Xiong Fu and Yeliang Cang. Task scheduling and virtual machine allocation policy in cloud computing environment [J]. Journal of Systems Engineering and Electronics, 2015, 26(4): 847-. |
| [10] | Xiaolong Xu, JiaxingWu, Geng Yang, and Ruchuan Wang. Low-power task scheduling algorithm for large-scale cloud data centers [J]. Journal of Systems Engineering and Electronics, 2013, 24(5): 870-878. |
| [11] | Jianghan Zhu, Lining Zhang, Dishan Qiu, and Haoping Li. Task scheduling for multi-electro-magnetic detection satellite with a combined algorithm [J]. Journal of Systems Engineering and Electronics, 2012, 23(1): 88-98. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||