
Journal of Systems Engineering and Electronics ›› 2022, Vol. 33 ›› Issue (4): 805-811.doi: 10.23919/JSEE.2022.000080
• CLOUD CONTROL SYSTEMS • Previous Articles Next Articles
Lanyong ZHANG( ), Ruixuan ZHANG*()
), Ruixuan ZHANG*()
Received:2022-02-28
Online:2022-08-30
Published:2022-08-30
Contact:
Ruixuan ZHANG
E-mail:zhanglanyong@hrbeu.edu.cn;13643292271@163.com
About author:Supported by:Lanyong ZHANG, Ruixuan ZHANG. Research on UAV cloud control system based on ant colony algorithm[J]. Journal of Systems Engineering and Electronics, 2022, 33(4): 805-811.
Add to citation manager EndNote|Reference Manager|ProCite|BibTeX|RefWorks

Fig 1
User information table"
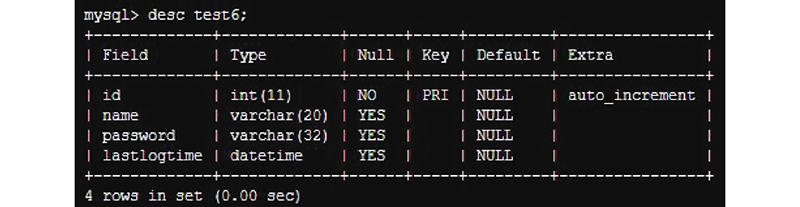

Fig 2
Real-time coordinate information table"
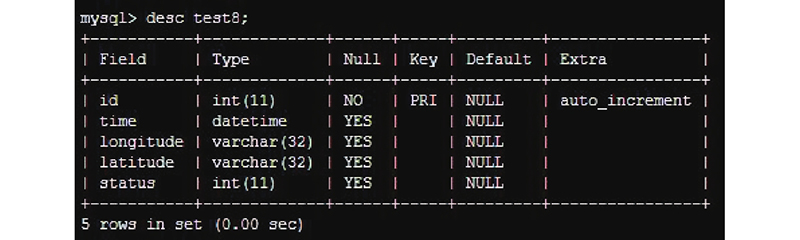

Fig 3
Historical data record"
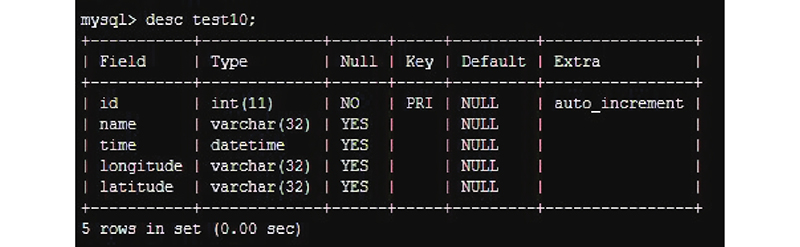

Fig 4
Position coordinate information table"
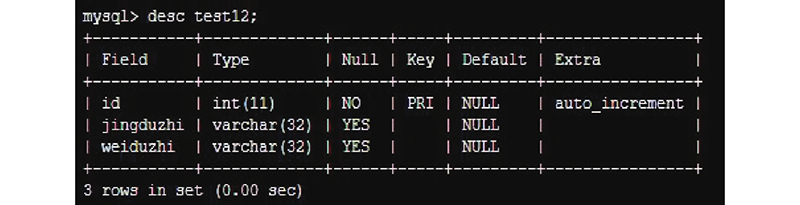
Table 1
Communication data command format"
| Data meaning | Number of bytes |
| Start flag | 2 |
| Remaining battery | 2 |
| Starting longitude | 2 |
| Starting dimension | 2 |
| End point longitude | 2 |
| End dimension | 2 |
| Other data bits | 15 |
| Check digit | 1 |

Fig 5
UAV trajectory"
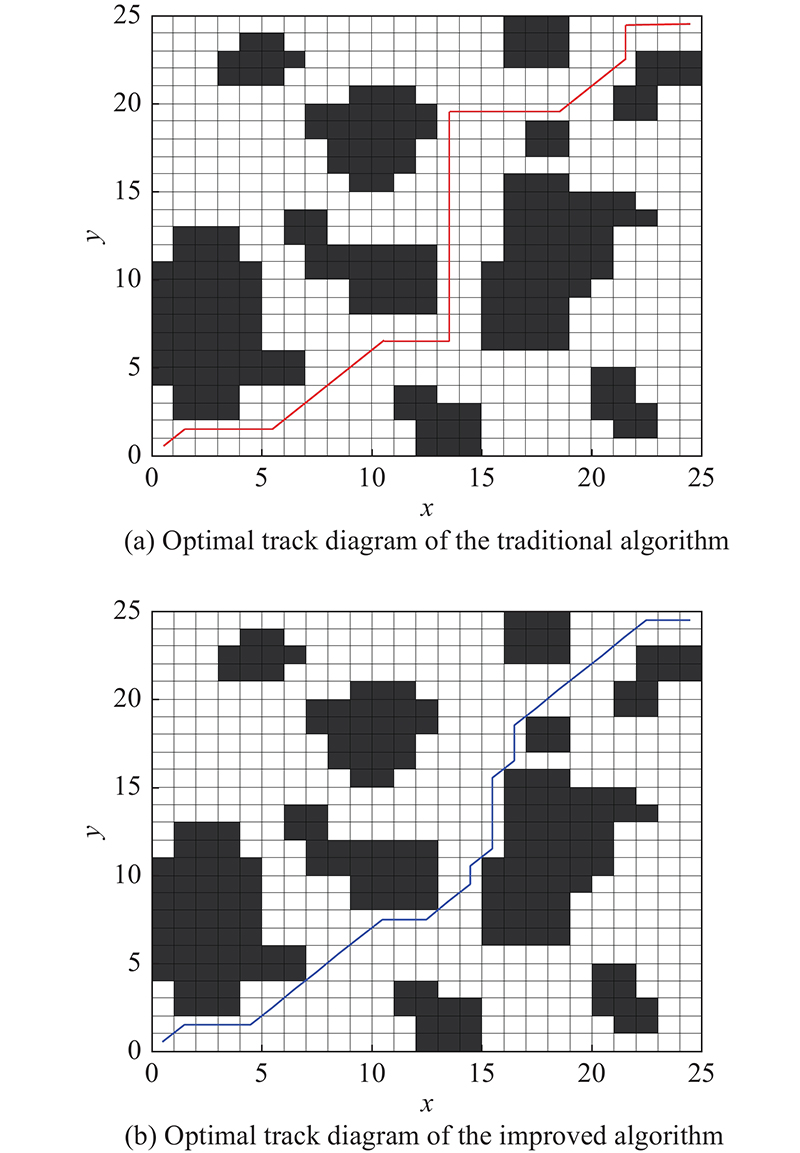
Table 2
Parameter settings"
| Parameter | Value |
| Number of ants | 45 |
| Strong pheromone | 50 |
| Repulsion field action distance | 5 |
| Gravitational potential field gain | 2 |
| Repulsive potential field gain | 2 |
| Pheromone heuristic factor | 1 |
| Expectation heuristic | 1 |
| Pheromone volatile factor | 50 |
| Iteration threshold | 100 |
| Potential field pheromone upper limit | 5 |
Fig 6
Convergence curve change trend"
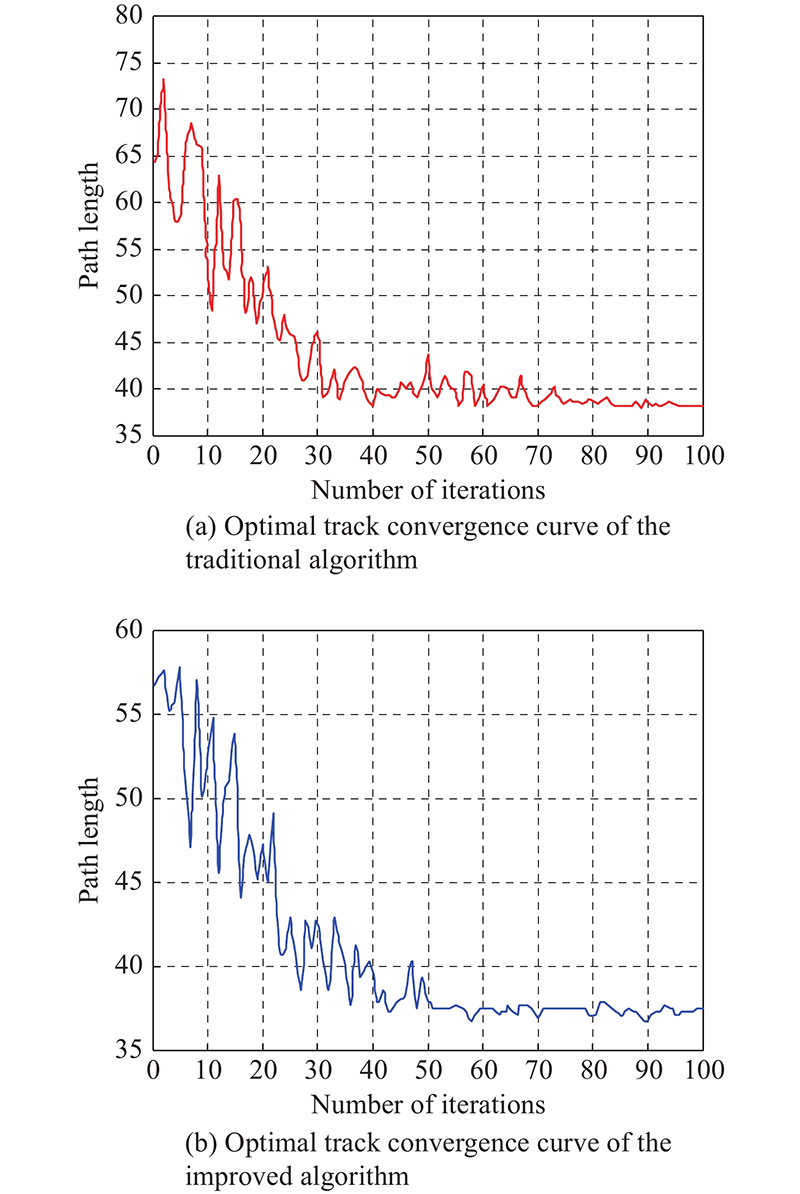
Table 3
Comparison of simulation experimental data"
| Algorithm | Number of iterations | Optimal distance/m | Maximum distance/m | Average running time/s |
| Traditional algorithm | 54 | 39.5 | 76.2 | 1.125 |
| Improved algorithm | 72 | 37.2 | 57.8 | 0.682 |

Fig 7
System login interface"


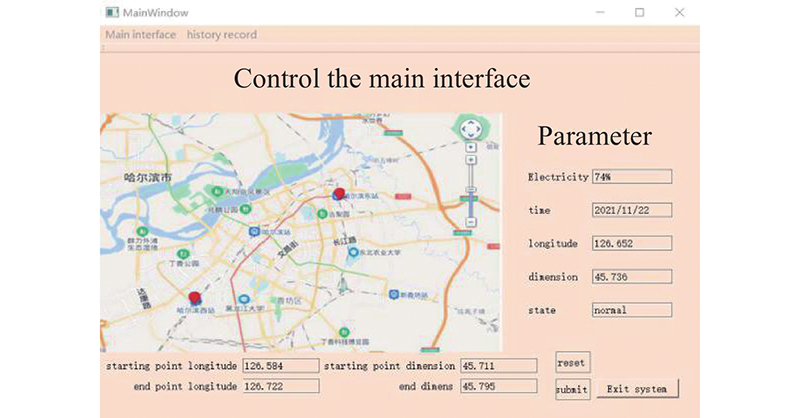
Fig 8
Control main interface"
| 1 | ZHOU L Y. Design and implementation of task-based UAV collaborative path planning method. Beijing: Beijing University of Posts and Telecommunications, 2021. (in Chinese) |
| 2 | WEI G Modified ant colony optimization with improved tour construction and pheromone updating strategies for traveling salesman problem. Soft Computing, 2020, 25 (12): 1- 27. |
| 3 |
SHANG X H, CHE X H Optimization fitness data monitoring system based on internet of things and cloud computing. Computer Communications, 2021, 177, 125- 132.
doi: 10.1016/j.comcom.2021.06.027 |
| 4 | MA Z Y, HE M, LIU Z J, et al Review of UAV collaborative control research. Computer Applications, 2021, 41 (5): 1477- 1483. |
| 5 | LV S Y, MA Z, DAI X F, et al A review of the research status of cloud control systems. Computer Application Research, 2021, 38 (5): 1287- 1293. |
| 6 | FERNANDO R, RANCHAL R, BHARGAVA B, et al A monitoring approach for policy enforcement in clouds services. Proc. of the IEEE 10th International Conference on Cloud Computing, 2017, 45- 58. |
| 7 | XIA Y Q, GAO R Z, LIN M, et al Research on cloud control system of green energy complementary smart power plant. Chinese Journal of Automation, 2020, 46 (9): 1844- 1868. |
| 8 | TAN H R, HUANG Z W, WU M, et al Design and implementation of monitoring system based on cloud control system. Control and Decision, 2019, 34 (8): 1688- 1694. |
| 9 | XU X Q, WANG M Y, MAO Y Path planning of mobile robots based on Improved artificial potential field method. Computer Applications, 2020, 40 (12): 3508- 3512. |
| 10 |
IMRANE M L, MELINGUI A, AHANDA J J B M Artificial potential field neuro-fuzzy controller for autonomous navigation of mobile robots. Proceedings of the Institution of Mechanical Engineers, Part I:Journal of Systems and Control Engineering, 2021, 235 (7): 1179- 1192.
doi: 10.1177/0959651820974831 |
| 11 |
TONG Z DDQN-TS: a novel bi-objective intelligent scheduling algorithm in the cloud environment. Neurocomputing, 2021, 455, 419- 430.
doi: 10.1016/j.neucom.2021.05.070 |
| 12 |
ZHOU J, CAO Z F, DONG X L, et al Security and privacy for cloud-based IoT: challenges. IEEE Communications Magazine, 2017, 55 (1): 26- 38.
doi: 10.1109/MCOM.2017.1600363CM |
| 13 | MANSOURI N, JAVIDI M M, AZDA B Hierarchical data replication strategy to improve performance in cloud computing. Frontiers of Computer Science, 2021, 15 (2): 60- 76. |
| 14 | LIN H W, CHEN Z X, CHEN Y X Design of business service robot system based on cloud control. Internet of Things Technology, 2020, 10 (3): 89- 91. |
| 15 | PLUZHNIK E, NIKULCHEV E, PAYAIN S Optimal control of applications for hybrid cloud services. Proc. of the IEEE World Congress on Services, 2014, 458- 461. |
| 16 | YAO F G. Research on campus network cloud storage open platform based on cloud computing and big data technology. Journal of Intelligent & Fuzzy Systems, 2020, 38(2): 1215-1223. |
| [1] | Gang LIU, Zhibiao AN, Songyang LAO, Wu LI. Firepower distribution method of anti-ship missile based on coupled path planning [J]. Journal of Systems Engineering and Electronics, 2022, 33(4): 1010-1024. |
| [2] | Alireza MOHSENI, Vincent DUCHAINE, Tony WONG. Experimental study of path planning problem using EMCOA for a holonomic mobile robot [J]. Journal of Systems Engineering and Electronics, 2021, 32(6): 1450-1462. |
| [3] | Zhen XU, Enze ZHANG, Qingwei CHEN. Rotary unmanned aerial vehicles path planning in rough terrain based on multi-objective particle swarm optimization [J]. Journal of Systems Engineering and Electronics, 2020, 31(1): 130-141. |
| [4] | Qiming YANG, Jiandong ZHANG, Guoqing SHI. Modeling of UAV path planning based on IMM under POMDP framework [J]. Journal of Systems Engineering and Electronics, 2019, 30(3): 545-554. |
| [5] | Zhenxing ZHANG, Rennong YANG, Huanyu LI, Yuhuan FANG, Zhenyu HUANG, Ying ZHANG. Antlion optimizer algorithm based on chaos search and its application [J]. Journal of Systems Engineering and Electronics, 2019, 30(2): 352-365. |
| [6] | Xiaoxuan Hu, Yanhong Liu, and Guoqiang Wang. Optimal search for moving targets with sensing capabilities using multiple UAVs [J]. Systems Engineering and Electronics, 2017, 28(3): 526-535. |
| [7] | Yani Cui, Jia Ren, Wencai Du, and Jingguo Dai. UAV target tracking algorithm based on task allocation consensus [J]. Journal of Systems Engineering and Electronics, 2016, 27(6): 1207-1218. |
| [8] | Mingyong Liu, Baogui Xu, and Xingguang Peng. Cooperative path planning for multi-AUV in time-varying ocean flows [J]. Systems Engineering and Electronics, 2016, 27(3): 612-618. |
| [9] | Lin Zhang, Kaili Rao, and Ruchuan Wang. T-QoS-aware based parallel ant colony algorithm for services composition [J]. Journal of Systems Engineering and Electronics, 2015, 26(5): 1100-1106. |
| [10] | Huicheng Hao, Wei Jiang, and Yijun Li. Improved algorithms to plan missions for agile earth observation satellites [J]. Journal of Systems Engineering and Electronics, 2014, 25(5): 811-821. |
| [11] | Xiang Gao, Yangwang Fang, and Youli Wu. Fuzzy Q learning algorithm for dual-aircraft path planning to cooperatively detect targets by passive radars [J]. Journal of Systems Engineering and Electronics, 2013, 24(5): 800-810. |
| [12] | Yuxing Mao, Ching Y. Suen, and Wei He. Extraction of affine invariant features for shape recognition based on ant colony optimization [J]. Journal of Systems Engineering and Electronics, 2011, 22(6): 1003-1009. |
| [13] | Xin Liu, Chengping Zhou, and Mingyue Ding. 3D multipath planning for UAV based on network graph [J]. Journal of Systems Engineering and Electronics, 2011, 22(4): 640-646. |
| [14] | Wang Lingxiao & Zhou Deyun. Effective path planning method for low detectable aircraft [J]. Journal of Systems Engineering and Electronics, 2009, 20(4): 784-789. |
| [15] | Jiang Nan, Yang Shuqun, Zhou Liang & Ding Qiulin. Impact of small-world topologies on broadcasting for wireless sensor networks [J]. Journal of Systems Engineering and Electronics, 2009, 20(1): 192-196. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||