
Journal of Systems Engineering and Electronics ›› 2022, Vol. 33 ›› Issue (4): 867-876.doi: 10.23919/JSEE.2022.000075
• ELECTRONICS TECHNOLOGY • Previous Articles Next Articles
Yuan ZENG1,2( ), Wenbin LU1(), Bo YU3(), Shifei TAO3(), Haosu ZHOU1(), Yu CHEN2,*()
), Wenbin LU1(), Bo YU3(), Shifei TAO3(), Haosu ZHOU1(), Yu CHEN2,*()
Received:2020-12-23
Online:2022-08-30
Published:2022-08-30
Contact:
Yu CHEN
E-mail:iamzengyuan@hotmail.com;dawen_lu@126.com;yb102725@njust.edu.cn;s.tao@njust.edu.cn;zhouhaosu@sina.com;cy0520tool@sohu.com.cn
About author:Supported by:Yuan ZENG, Wenbin LU, Bo YU, Shifei TAO, Haosu ZHOU, Yu CHEN. Improved IMM algorithm based on support vector regression for UAV tracking[J]. Journal of Systems Engineering and Electronics, 2022, 33(4): 867-876.
Add to citation manager EndNote|Reference Manager|ProCite|BibTeX|RefWorks
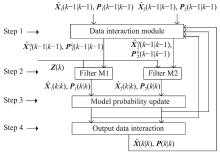
Fig 1
IMM algorithm flow chart"
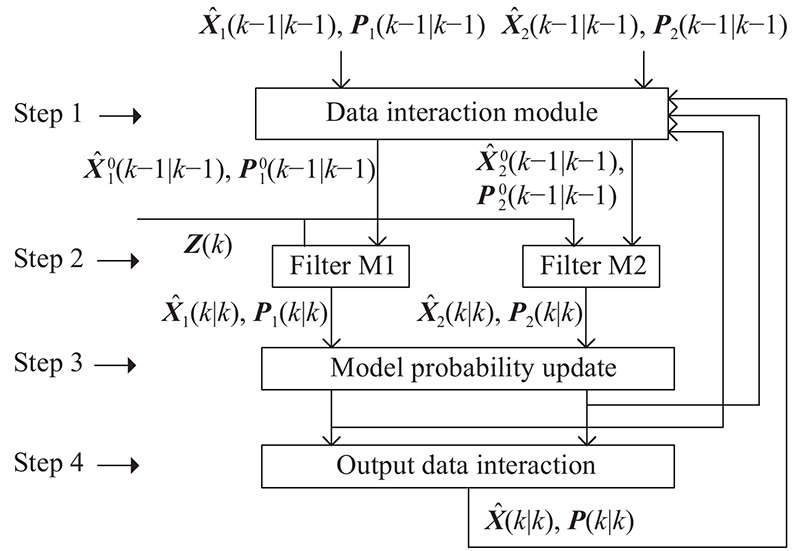
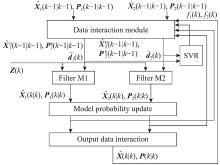
Fig 2
Improved IMM algorithm flow chart"
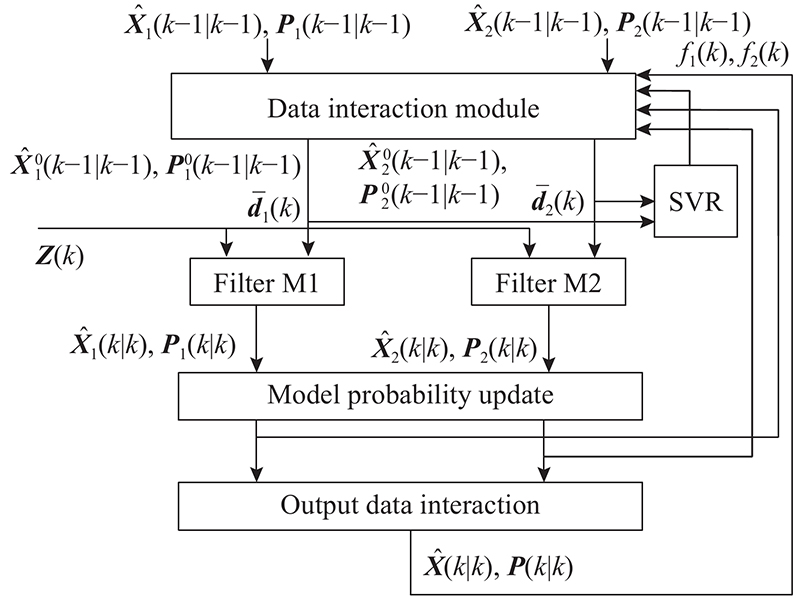
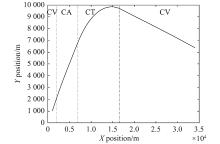
Fig 3
Track diagram in Scenario 1"
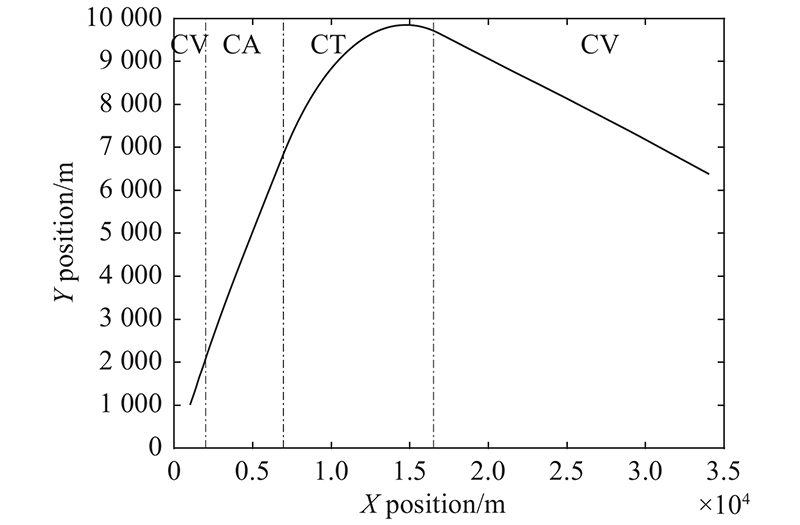
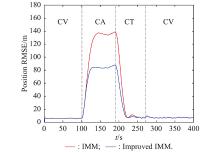
Fig 4
RMSE of position in Scenario 1"
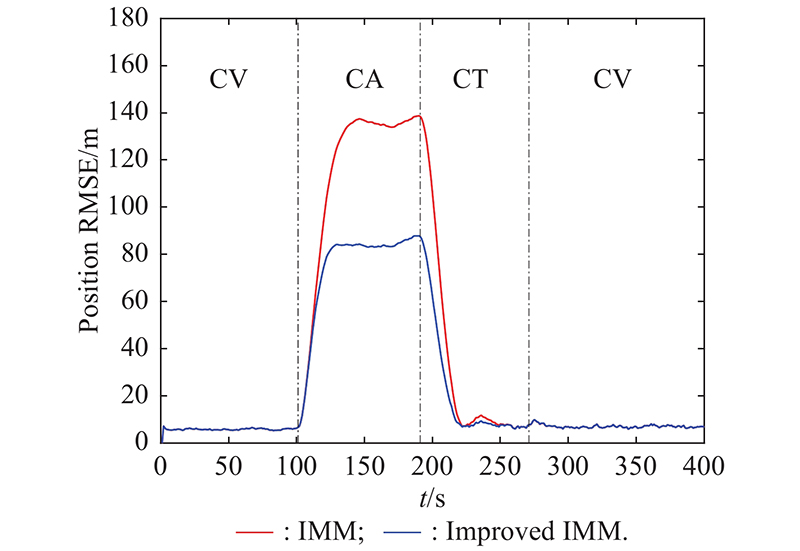
Fig 5
Root mean square error of speed in Scenario 1"
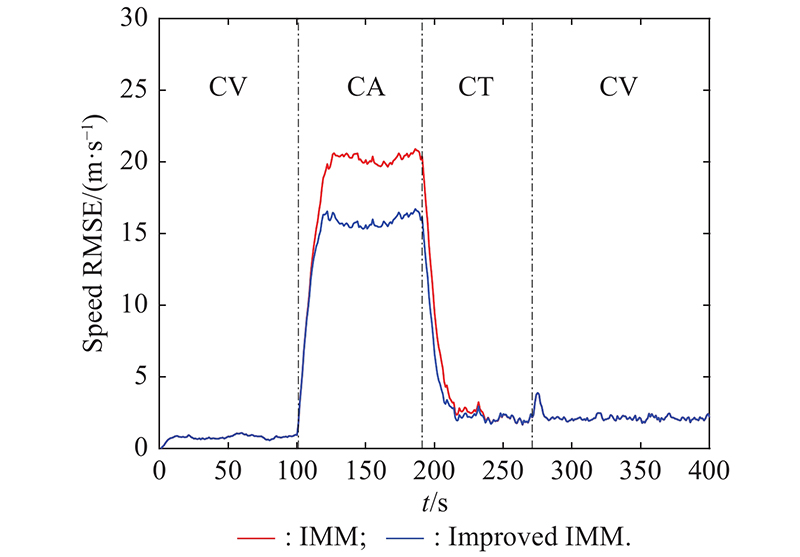
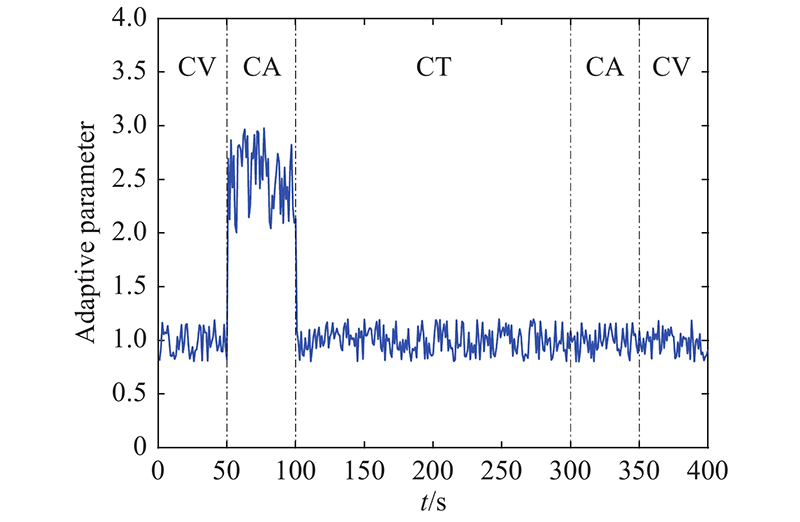
Fig 6
Adaptive parameter changes in Scenario 1"
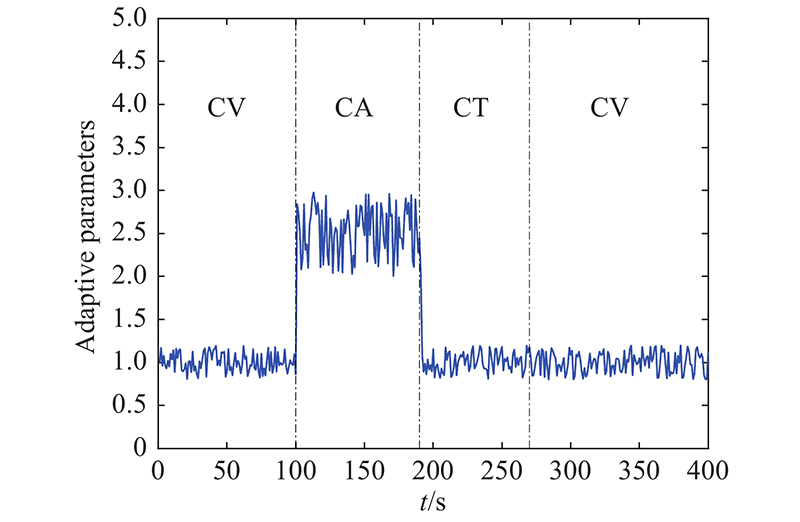
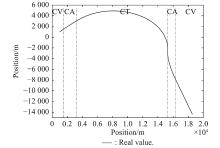
Fig 7
Track diagram in Scenario 2"
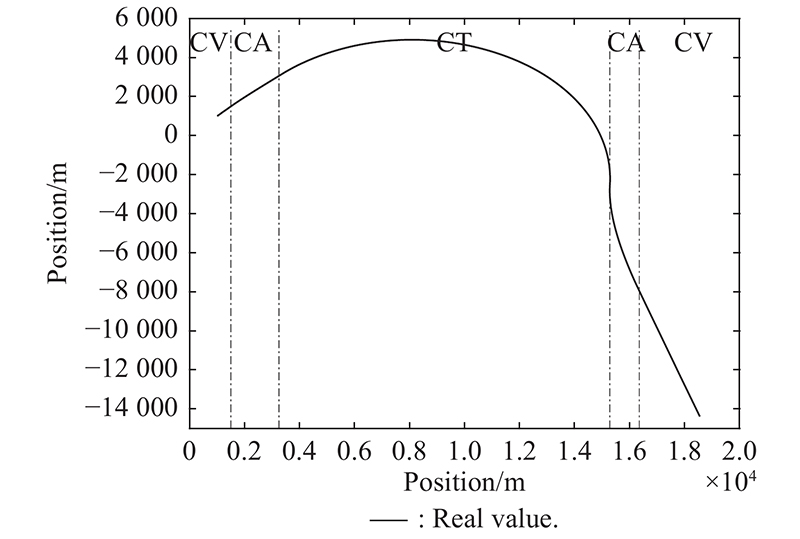
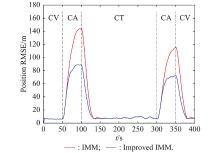
Fig 8
RMSE of position in Scenario 2"
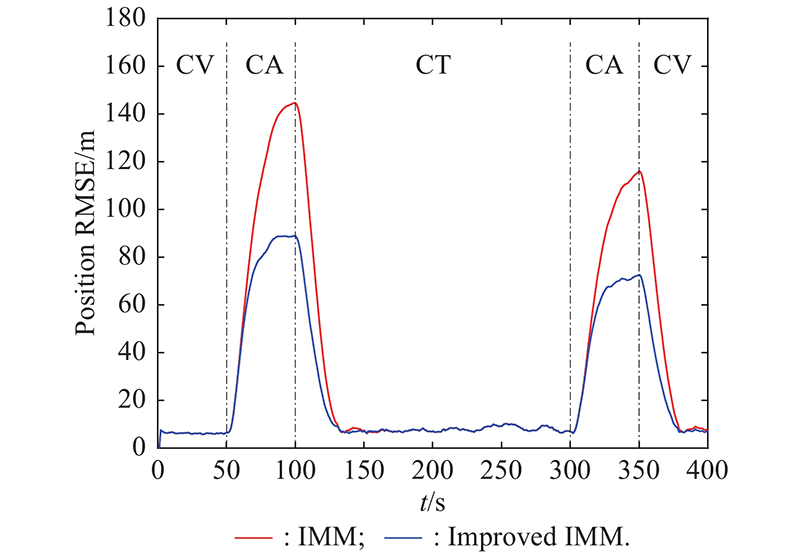
Fig 9
RMSE of speed in Scenario 2"
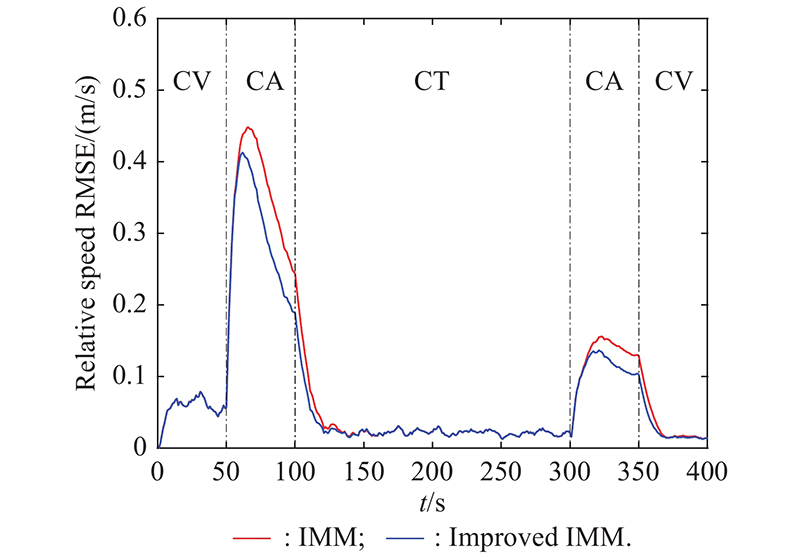
Fig 10
Adaptive parameter changes in Scenario 2"
| 1 |
BLOM H, BAR-SHALOM Y The interacting multiple model algorithm for systems with Markovian switching coefficients. IEEE Trans. on Automatic Control, 1988, 33 (8): 780- 783.
doi: 10.1109/9.1299 |
| 2 | HE Y, XIU J J, GUAN X. Radar data processing and application. Beijing: Publishing House of Electronics Industry, 2009. (in Chinese) |
| 3 |
MAGILL D T Optimal adaptive estimation of sampled stochastic processes. IEEE Trans. on Automatic Control, 1965, 10, 434- 439.
doi: 10.1109/TAC.1965.1098191 |
| 4 | ELLSWORTH D A A new algorithm for interactive graphics on multicomputers. IEEE Computer Graphics & Applications, 1994, 14 (4): 33- 40. |
| 5 |
LI X R, ZHANG Y M, ZHI X R, et al Multiple-model estimation with variable structure Part IV: design and evaluation of model-group. IEEE Trans. on Aerospace & Electronic Systems, 1999, 35 (1): 242- 254.
doi: 10.1109/ACCESS.2019.2912983 |
| 6 | HAN B, HUANG H Q, LEI L, et al An improved IMM algorithm based on STSRCKF for maneuvering target tracking. IEEE Access, 2019, 7, 57795- 57804. |
| 7 | ZHANG R, HU G P Target tracking algorithm based on IMM/MSPDAF data fusion of multi-sensor. Modern Defence Technology, 2010, 38 (6): 123- 127. |
| 8 | KIM B D, LEE J S. IMM algorithm based on the analytic solution of steady state Kalman filter for radar target tracking. Proc of the IEEE International Radar Conference, 2005. DOI: 10.1109/RADAR.2005.1435927. |
| 9 | XIONG Z K, JANG H Y, LI Q, et al. The research of maneuvering target tracking based on interacting multiple model. Proc. of the IET International Conference on Automatic Control and Artifical Intelligence, 2013. DOI: 10.1049/cp.2012.1429. |
| 10 | CHEN X, LI Z W, HU X D, et al. Research on radar/infrared data fusion target tracking algorithm in cluttering. Journal of Chinese Computer Systems, 2019, 40(8): 1794−1798. (in Chinese) |
| 11 | GOSWAMI A, LEE C S G. Design of an interactive multiple model based two-stage multi-vehicle tracking algorithm for autonomous navigation. Proc. of the IEEE Intelligent Vehicles Symposium, 2015(10): 261–266. |
| 12 | TIAN J L, FU C Y, TANG T Maneuver-adaptive target tracking algorithm with bearings-only measurements. Opto-Electronic Engineering, 2011, 38 (10): 57- 65. |
| 13 | LI W L, JIA Y M. An information theoretic approach to interacting multiple model estimation. IEEE Trans. on Aerospace & Electronic Systems, 2015, 51(3): 1811–1825. |
| 14 | SEAH C E, HWANG I Algorithm for performance analysis of the IMM algorithm. IEEE Trans. on Aerospace & Electronic Systems, 2011, 47 (2): 1114- 1124. |
| 15 | OSBORNE R W, BLAIR W D Update to the hybrid conditional averaging performance prediction of the IMM algorithm. IEEE Trans. on Aerospace & Electronic Systems, 2011, 47 (4): 2967- 2974. |
| 16 |
GONG S L, WANG X H, HUANG S G Tracking moving target on airport surface based on variable-structure IMM algorithm. Advanced Materials Research, 2012, 459, 603- 608.
doi: 10.4028/www.scientific.net/AMR.459.603 |
| 17 | SHIN H J, EOM D H, KIM S S One-class support vector machines-an application in machine fault detection and classification. Computers & Chemical Engineering, 2005, 48 (2): 395- 408. |
| 18 | DIEGO F F, DAVID M R, FONTENLA-ROMERO O, et al Automatic bearing fault diagnosis based on one-class v-SVM. Computers & Industrial Engineering, 2013, 64 (1): 357- 365. |
| 19 | XIE S Q, SHEN F M, QIU X N Face recognition method based on support vector machine. Computer Engineering, 2009, 35 (16): 186- 188. |
| 20 | ATHERTON D P, LIN H J Parallel implementation of IMM tracking algorithm using transputers. IEE Proceedings-Radar, Sonar and Navigation, 2002, 141 (6): 325- 332. |
| 21 | LI X R, JILKOV V P. A survey of maneuvering target tracking-Part III: measurement models. Proceedings of SPIE - The International Society for Optical Engineering, 2001, 4473:423–446. |
| [1] | Honghong ZHANG, Xusheng GAN, Shuangfeng LI, Zhiyuan CHEN. UAV safe route planning based on PSO-BAS algorithm [J]. Journal of Systems Engineering and Electronics, 2022, 33(5): 1151-1160. |
| [2] | Zhuanhua ZHANG, Gongjian ZHOU. Maneuvering target state estimation based on separate modeling of target trajectory shape and dynamic characteristics [J]. Journal of Systems Engineering and Electronics, 2022, 33(5): 1195-1209. |
| [3] | Yangjun GAO, Guangyun LI, Zhiwei LYU, Lundong ZHANG, Zhongpan LI. Improved adaptively robust estimation algorithm for GNSS spoofer considering continuous observation error [J]. Journal of Systems Engineering and Electronics, 2022, 33(5): 1237-1248. |
| [4] | Dongju CAO, Wendong YANG, Hui CHEN, Yang WU, Xuanxuan TANG. Energy efficiency maximization for buffer-aided multi-UAV relaying communications [J]. Journal of Systems Engineering and Electronics, 2022, 33(2): 312-321. |
| [5] | Yangyang JIANG, Yan GAO, Wenqi SONG, Yue LI, Quan QUAN. Bibliometric analysis of UAV swarms [J]. Journal of Systems Engineering and Electronics, 2022, 33(2): 406-425. |
| [6] | Jinqiang HU, Husheng WU, Renjun ZHAN, Rafik MENASSEL, Xuanwu ZHOU. Self-organized search-attack mission planning for UAV swarm based on wolf pack hunting behavior [J]. Journal of Systems Engineering and Electronics, 2021, 32(6): 1463-1476. |
| [7] | Ziquan YU, Youmin ZHANG, Bin JIANG. PID-type fault-tolerant prescribed performance control of fixed-wing UAV [J]. Journal of Systems Engineering and Electronics, 2021, 32(5): 1053-1061. |
| [8] | Juan Antonio VAZQUEZ TREJO, Adrien GUENARD, Manuel ADAM-MEDINA, Jean-Christophe PONSART, Laurent CIARLETTA, Damiano ROTONDO, Didier THEILLIOL. Event-triggered leader-following formation control for multi-agent systems under communication faults: application to a fleet of unmanned aerial vehicles [J]. Journal of Systems Engineering and Electronics, 2021, 32(5): 1014-1022. |
| [9] | Tao YE, Zongyang ZHAO, Jun ZHANG, Xinghua CHAI, Fuqiang ZHOU. Low-altitude small-sized object detection using lightweight feature-enhanced convolutional neural network [J]. Journal of Systems Engineering and Electronics, 2021, 32(4): 841-853. |
| [10] | Gaofeng WU, Kaifang WAN, Xiaoguang GAO, Xiaowei FU. Placement of unmanned aerial vehicles as communication relays in two-tiered multi-agent system: clustering based methods [J]. Journal of Systems Engineering and Electronics, 2020, 31(2): 231-242. |
| [11] | Zhen XU, Enze ZHANG, Qingwei CHEN. Rotary unmanned aerial vehicles path planning in rough terrain based on multi-objective particle swarm optimization [J]. Journal of Systems Engineering and Electronics, 2020, 31(1): 130-141. |
| [12] | Min ZHANG, Chenming ZHENG, Kun HUANG. Fixed-wing UAV guidance law for ground target over-flight tracking [J]. Journal of Systems Engineering and Electronics, 2019, 30(2): 384-392. |
| [13] | Zhiqiang JIAO, Peiyang YAO, Jieyong ZHANG, Yun ZHONG, Xun WANG. MAV/UAV task coalition phased-formation method [J]. Journal of Systems Engineering and Electronics, 2019, 30(2): 402-414. |
| [14] | Mahmoudreza HADAEGH, Hamid KHALOOZADEH. Modified switched IMM estimator based on autoregressive extended Viterbi method for maneuvering target tracking [J]. Journal of Systems Engineering and Electronics, 2018, 29(6): 1142-1157. |
| [15] | Liang ZHANG, Yi LU, Shida XU, Han FENG. Multiple UAVs cooperative formation forming control based on back-stepping-like approach [J]. Journal of Systems Engineering and Electronics, 2018, 29(4): 816-822. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||