
Journal of Systems Engineering and Electronics ›› 2021, Vol. 32 ›› Issue (5): 1053-1061.doi: 10.23919/JSEE.2021.000090
• New Developments on FDD and FTC Techniques • Previous Articles Next Articles
Ziquan YU1( ), Youmin ZHANG2,*(), Bin JIANG1()
), Youmin ZHANG2,*(), Bin JIANG1()
Received:2021-05-02
Online:2021-10-18
Published:2021-11-04
Contact:
Youmin ZHANG
E-mail:yuziquan@nuaa.edu.cn;ymzhang@encs.concordia.ca;binjiang@nuaa.edu.cn
About author:Supported by:Ziquan YU, Youmin ZHANG, Bin JIANG. PID-type fault-tolerant prescribed performance control of fixed-wing UAV[J]. Journal of Systems Engineering and Electronics, 2021, 32(5): 1053-1061.
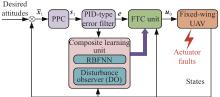
Fig 1
Structure of the developed FTC scheme"
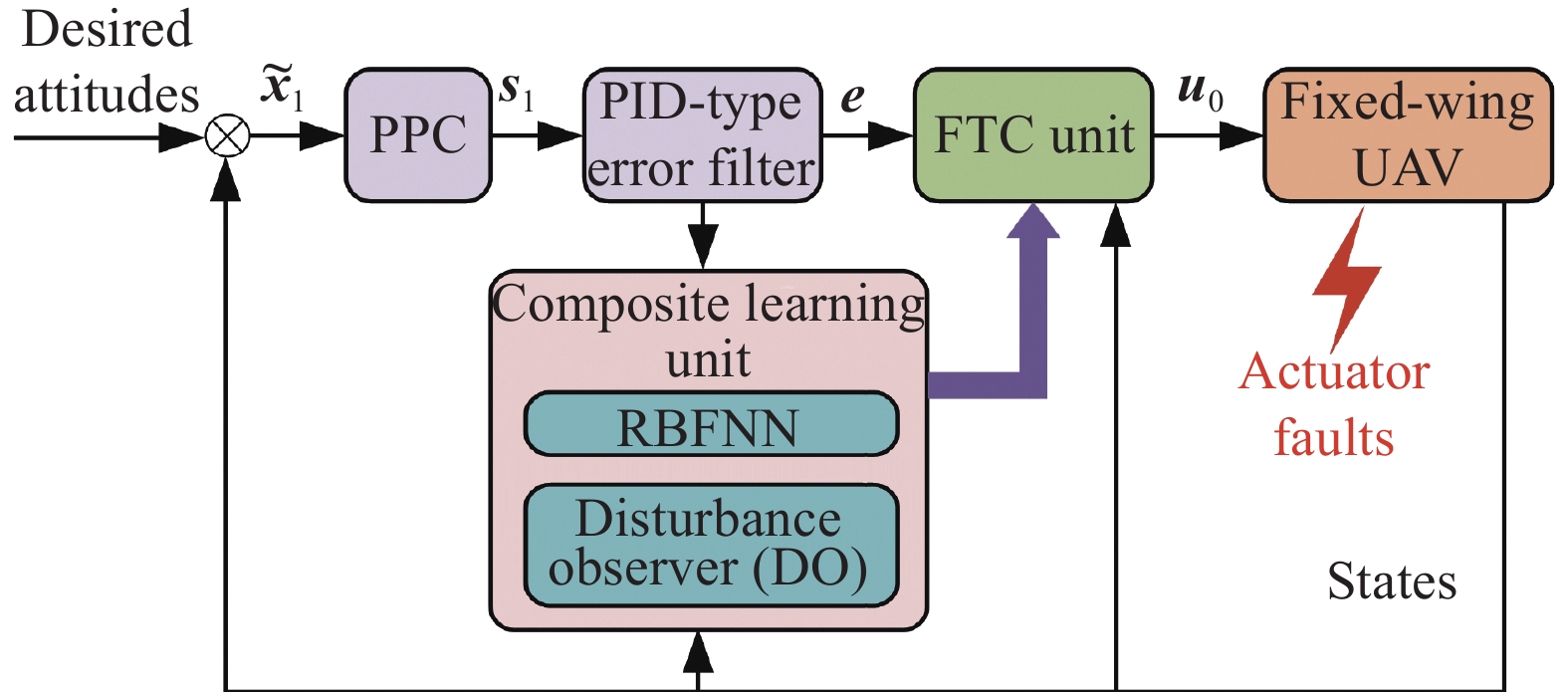

Fig 2
HIL testbed"
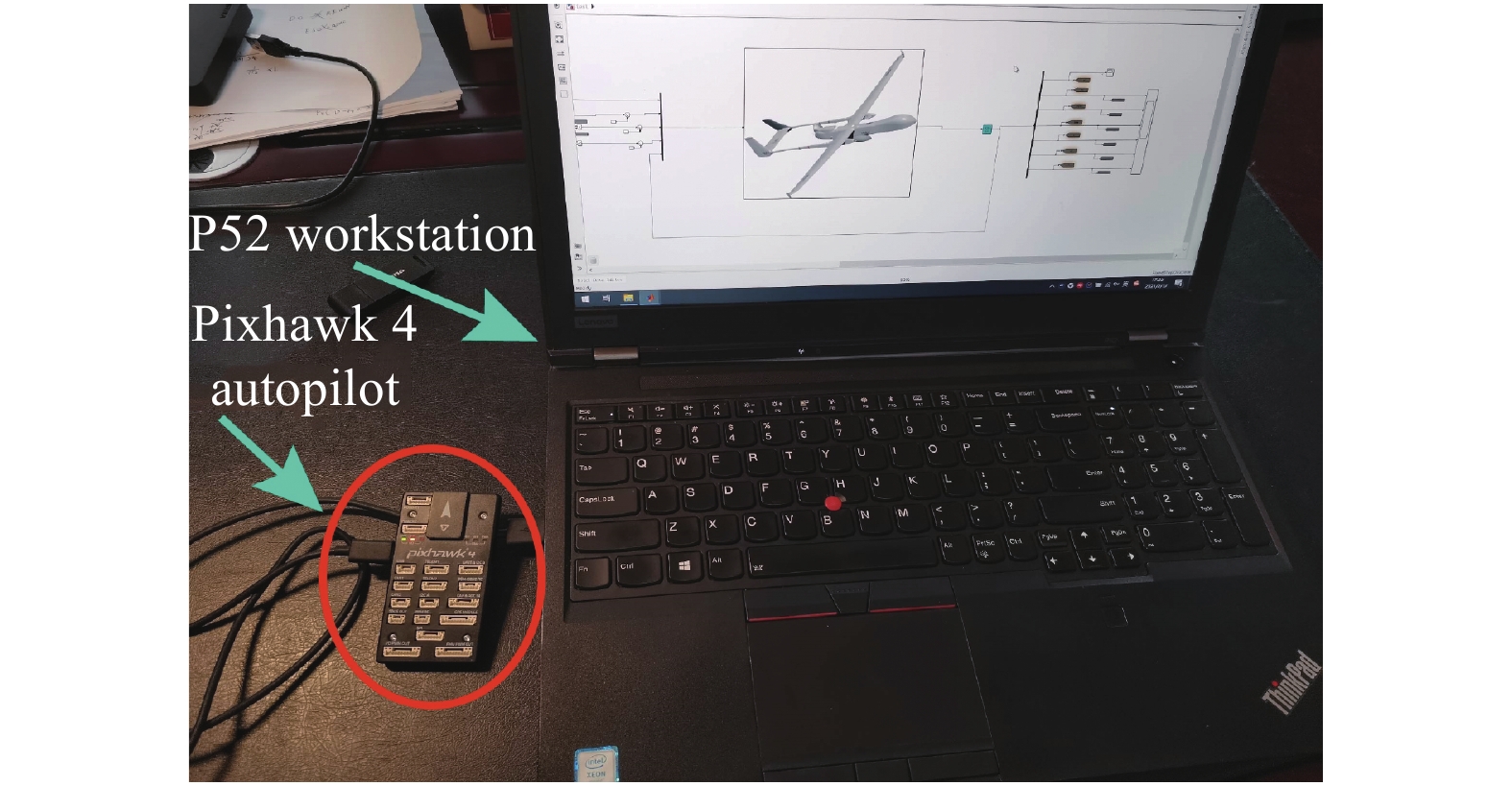

Fig 3
Reseponse curves"
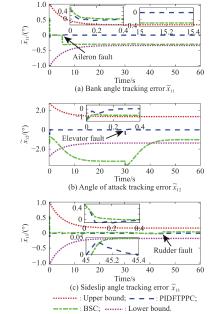
Fig 4
Attitude tracking erros"
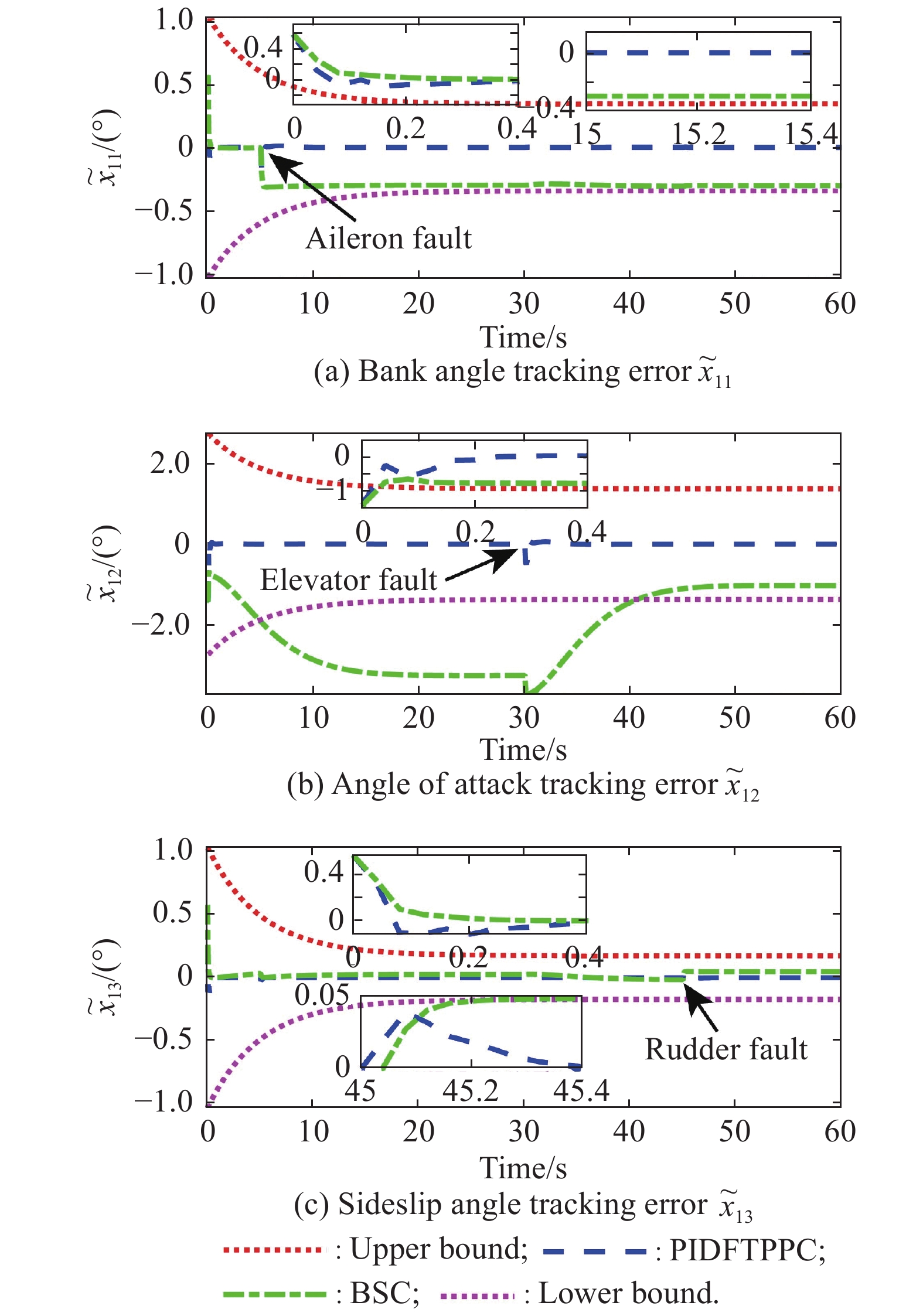

Fig 5
Aileron, elevator and rudder deflection angles"
| 1 |
LIU P, CHEN A Y, HUANG Y, et al A review of rotorcraft unmanned aerial vehicle (UAV) developments and applications in civil engineering. Smart Structures and Systems, 2014, 13 (6): 1065- 1094.
doi: 10.12989/sss.2014.13.6.1065 |
| 2 |
ZHANG C, KOVACS J M The application of small unmanned aerial systems for precision agriculture: a review. Precision Agriculture, 2012, 13 (6): 693- 712.
doi: 10.1007/s11119-012-9274-5 |
| 3 |
SAEED A S, YOUNES A B, CAI C, et al A survey of hybrid unmanned aerial vehicles. Progress in Aerospace Sciences, 2018, 98, 91- 105.
doi: 10.1016/j.paerosci.2018.03.007 |
| 4 |
HU X X, MA H W, YE Q S, et al Hierarchical method of task assignment for multiple cooperating UAV teams. Journal of Systems Engineering and Electronics, 2015, 26 (5): 1000- 1009.
doi: 10.1109/JSEE.2015.00109 |
| 5 | ZHANG Y M, JIANG J Bibliographical review on reconfigurable fault-tolerant control systems. Annual Reviews in Control, 2008, 32 (2): 229- 252. |
| 6 |
JIANG B, ZHANG K, LIU C, et al Fault diagnosis and accommodation with flight control applications. Journal of Control and Decision, 2020, 7 (1): 24- 43.
doi: 10.1080/23307706.2019.1686434 |
| 7 |
CONG L, QIN H L, TAN Z Z Intelligent fault-tolerant algorithm with two-stage and feedback for integrated navigation federated filtering. Journal of Systems Engineering and Electronics, 2011, 22 (2): 274- 282.
doi: 10.3969/j.issn.1004-4132.2011.02.014 |
| 8 |
XU Y F, JIANG B, GAO Z F, et al Fault tolerant control for near space vehicle: a survey and some new results. Journal of Systems Engineering and Electronics, 2011, 22 (1): 88- 94.
doi: 10.3969/j.issn.1004-4132.2011.01.011 |
| 9 |
REN Z, WANG W, SHEN Z New robust fault-tolerant controller for self-repairing flight control systems. Journal of Systems Engineering and Electronics, 2011, 22 (1): 77- 82.
doi: 10.3969/j.issn.1004-4132.2011.01.009 |
| 10 | YU Z Q, ZHANG Y M, JIANG B, et al. A review on fault-tolerant cooperative control of multiple unmanned aerial vehicles. Chinese Journal of Aeronautics, 2021. DOI: 10.1016/j.cja.2021.04.022. |
| 11 | ZHOU D H, ZHAO Y H, WANG Z D, et al Review on diagnosis techniques for intermittent faults in dynamic systems. IEEE Trans. on Industrial Electronics, 2019, 67 (3): 2337- 2347. |
| 12 | MENG L, JIANG B Backstepping-based active fault-tolerant control for a class of uncertain SISO nonlinear systems. Journal of Systems Engineering and Electronics, 2009, 20 (6): 1263- 1270. |
| 13 | CAO T, GAO Z F, QIAN M S, et al. Passive fault tolerant control approach for hypersonic vehicle with actuator loss of effectiveness faults. Proc. of the Chinese Control and Decision Conference, 2016: 5951−5956. |
| 14 |
NASIRI A, NGUANG S K, SWAIN A, et al Passive actuator fault tolerant control for a class of MIMO nonlinear systems with uncertainties. International Journal of Control, 2019, 92 (3): 693- 704.
doi: 10.1080/00207179.2017.1367102 |
| 15 | ZHANG G G, ZHANG H, HUANG X Y, et al Active fault-tolerant control for electric vehicles with independently driven rear in-wheel motors against certain actuator faults. IEEE Trans. on Control Systems Technology, 2015, 24 (5): 1557- 1572. |
| 16 | SHEN Q, YUE C F, GOH C H, et al Active fault-tolerant control system design for spacecraft attitude maneuvers with actuator saturation and faults. IEEE Trans. on Industrial Electronics, 2018, 66 (5): 3763- 3772. |
| 17 |
HOU Z W, LU P, TU Z J Nonsingular terminal sliding mode control for a quadrotor UAV with a total rotor failure. Aerospace Science and Technology, 2020, 98, 105716.
doi: 10.1016/j.ast.2020.105716 |
| 18 | YU Z Q, LIU Z X, ZHANG Y M, et al Distributed finite-time fault-tolerant containment control for multiple unmanned aerial vehicles. IEEE Trans. on Neural Networks and Learning Systems, 2019, 31 (6): 2077- 2091. |
| 19 | YU Z Q, ZHANG Y M, JIANG B, et al. Composite adaptive disturbance observer-based decentralized fractional-order fault-tolerant control of networked UAVs. IEEE Trans. on Systems, Man, and Cybernetics: Systems, 2020. DOI: 10.1109/TSMC.2020.3010678. |
| 20 |
YU Z Q, ZHANG Y M, JIANG B, et al Decentralized fractional-order backstepping fault-tolerant control of multi-UAVs against actuator faults and wind effects. Aerospace Science and Technology, 2020, 104, 105939.
doi: 10.1016/j.ast.2020.105939 |
| 21 |
YU Z Q, ZHANG Y M, JIANG B, et al Nussbaum-based finite-time fractional-order backstepping fault-tolerant flight control of fixed-wing UAV against input saturation with hardware-in-the-loop validation. Mechanical Systems and Signal Processing, 2021, 153, 107406.
doi: 10.1016/j.ymssp.2020.107406 |
| 22 |
BECHLIOULIS C P, ROVITHAKIS G A Robust adaptive control of feedback linearizable MIMO nonlinear systems with prescribed performance. IEEE Trans. on Automatic Control, 2008, 53 (9): 2090- 2099.
doi: 10.1109/TAC.2008.929402 |
| 23 | LI Y M, TONG S C Adaptive neural networks prescribed performance control design for switched interconnected uncertain nonlinear systems. IEEE Trans. on Neural Networks and Learning Systems, 2017, 29 (7): 3059- 3068. |
| 24 | BECHLIOULIS C P, ROVITHAKIS G A. Approximation-free prescribed performance control for unknown SISO pure feedback systems. Proc. of the European Control Conference, 2013: 1557−1572. |
| 25 |
ZHAO K, SONG Y D, MA T D, et al Prescribed performance control of uncertain Euler-Lagrange systems subject to full-state constraints. IEEE Trans. on Neural Networks and Learning Systems, 2018, 29 (8): 3478- 3489.
doi: 10.1109/TNNLS.2017.2727223 |
| 26 | HAN S I, LEE J M Partial tracking error constrained fuzzy dynamic surface control for a strict feedback nonlinear dynamic system. IEEE Trans. on Fuzzy Systems, 2013, 22 (5): 1049- 1061. |
| 27 | THEODORAKOPOULOS A, ROVITHAKIS G A Low-complexity prescribed performance control of uncertain MIMO feedback linearizable systems. IEEE Trans. on Automatic Control, 2015, 61 (7): 1946- 1952. |
| 28 |
HUA C C, CHEN J, GUAN X P Adaptive prescribed performance control of QUAVs with unknown time-varying payload and wind gust disturbance. Journal of the Franklin Institute, 2018, 355 (14): 6323- 6338.
doi: 10.1016/j.jfranklin.2018.05.062 |
| 29 |
QIAN M, JIANG B, LIU H H Dynamic surface active fault tolerant control design for the attitude control systems of UAV with actuator fault. International Journal of Control, Automation and Systems, 2016, 14 (3): 723- 732.
doi: 10.1007/s12555-015-0020-4 |
| 30 | YU Z Q, ZHANG Y M, LIU Z X, et al. Decentralized finite-time adaptive fault-tolerant synchronization tracking control for multiple UAVs with prescribed performance. Journal of the Franklin Institute, 2020, 357(16): 11830−11862. |
| 31 |
YU Z Q, ZHANG Y M, JIANG B, et al Distributed adaptive fault-tolerant close formation flight control of multiple trailing fixed-wing UAVs. ISA Transactions, 2020, 106, 181- 199.
doi: 10.1016/j.isatra.2020.07.005 |
| 32 | YU Z Q, QU Y H, ZHANG Y M Distributed fault-tolerant cooperative control for multi-UAVs under actuator fault and input saturation. IEEE Trans. on Control Systems Technology, 2018, 27 (6): 2417- 2429. |
| 33 |
CHOWDHARY G, JOHNSON E N, CHANDRAMOHAN R, et al Guidance and control of airplanes under actuator failures and severe structural damage. Journal of Guidance, Control, and Dynamics, 2013, 36 (4): 1093- 1104.
doi: 10.2514/1.58028 |
| 34 | YU Z Q, LIU Z X, ZHANG Y M, et al Decentralized fault-tolerant cooperative control of multiple UAVs with prescribed attitude synchronization tracking performance under directed communication topology. Frontiers of Information Technology & Electronic Engineering, 2019, 20 (5): 685- 700. |
| 35 | YU Z Q, ZHANG Y M, LIU Z X, et al Distributed adaptive fractional-order fault-tolerant cooperative control of networked unmanned aerial vehicles via fuzzy neural networks. IET Control Theory & Applications, 2019, 13 (17): 2917- 2929. |
| 36 |
YU Z Q, QU Y H, ZHANG Y M Safe control of trailing UAV in close formation flight against actuator fault and wake vortex effect. Aerospace Science and Technology, 2018, 77, 189- 205.
doi: 10.1016/j.ast.2018.01.028 |
| 37 | ZOU A, HOU Z, TAN M Adaptive control of a class of nonlinear pure-feedback systems using fuzzy backstepping approach. IEEE Trans. on Fuzzy Systems, 2008, 16 (4): 886- 897. |
| [1] | Honghong ZHANG, Xusheng GAN, Shuangfeng LI, Zhiyuan CHEN. UAV safe route planning based on PSO-BAS algorithm [J]. Journal of Systems Engineering and Electronics, 2022, 33(5): 1151-1160. |
| [2] | Yangjun GAO, Guangyun LI, Zhiwei LYU, Lundong ZHANG, Zhongpan LI. Improved adaptively robust estimation algorithm for GNSS spoofer considering continuous observation error [J]. Journal of Systems Engineering and Electronics, 2022, 33(5): 1237-1248. |
| [3] | Yuan ZENG, Wenbin LU, Bo YU, Shifei TAO, Haosu ZHOU, Yu CHEN. Improved IMM algorithm based on support vector regression for UAV tracking [J]. Journal of Systems Engineering and Electronics, 2022, 33(4): 867-876. |
| [4] | Dongju CAO, Wendong YANG, Hui CHEN, Yang WU, Xuanxuan TANG. Energy efficiency maximization for buffer-aided multi-UAV relaying communications [J]. Journal of Systems Engineering and Electronics, 2022, 33(2): 312-321. |
| [5] | Yangyang JIANG, Yan GAO, Wenqi SONG, Yue LI, Quan QUAN. Bibliometric analysis of UAV swarms [J]. Journal of Systems Engineering and Electronics, 2022, 33(2): 406-425. |
| [6] | Jinqiang HU, Husheng WU, Renjun ZHAN, Rafik MENASSEL, Xuanwu ZHOU. Self-organized search-attack mission planning for UAV swarm based on wolf pack hunting behavior [J]. Journal of Systems Engineering and Electronics, 2021, 32(6): 1463-1476. |
| [7] | Steven Xianchuan DING, Linlin LI, Bin JIANG. Unified control and detection framework and its applications: a review, some new results, and future perspectives [J]. Journal of Systems Engineering and Electronics, 2021, 32(5): 995-1013. |
| [8] | Sader MALIKA, Fuyong WANG, Zhongxin LIU, Zengqiang CHEN. Distributed fuzzy fault-tolerant consensus of leader-follower multi-agent systems with mismatched uncertainties [J]. Journal of Systems Engineering and Electronics, 2021, 32(5): 1031-1040. |
| [9] | Juan Antonio VAZQUEZ TREJO, Adrien GUENARD, Manuel ADAM-MEDINA, Jean-Christophe PONSART, Laurent CIARLETTA, Damiano ROTONDO, Didier THEILLIOL. Event-triggered leader-following formation control for multi-agent systems under communication faults: application to a fleet of unmanned aerial vehicles [J]. Journal of Systems Engineering and Electronics, 2021, 32(5): 1014-1022. |
| [10] | Tao YE, Zongyang ZHAO, Jun ZHANG, Xinghua CHAI, Fuqiang ZHOU. Low-altitude small-sized object detection using lightweight feature-enhanced convolutional neural network [J]. Journal of Systems Engineering and Electronics, 2021, 32(4): 841-853. |
| [11] | Gaofeng WU, Kaifang WAN, Xiaoguang GAO, Xiaowei FU. Placement of unmanned aerial vehicles as communication relays in two-tiered multi-agent system: clustering based methods [J]. Journal of Systems Engineering and Electronics, 2020, 31(2): 231-242. |
| [12] | Zhen XU, Enze ZHANG, Qingwei CHEN. Rotary unmanned aerial vehicles path planning in rough terrain based on multi-objective particle swarm optimization [J]. Journal of Systems Engineering and Electronics, 2020, 31(1): 130-141. |
| [13] | Min ZHANG, Chenming ZHENG, Kun HUANG. Fixed-wing UAV guidance law for ground target over-flight tracking [J]. Journal of Systems Engineering and Electronics, 2019, 30(2): 384-392. |
| [14] | Zhiqiang JIAO, Peiyang YAO, Jieyong ZHANG, Yun ZHONG, Xun WANG. MAV/UAV task coalition phased-formation method [J]. Journal of Systems Engineering and Electronics, 2019, 30(2): 402-414. |
| [15] | Liang ZHANG, Yi LU, Shida XU, Han FENG. Multiple UAVs cooperative formation forming control based on back-stepping-like approach [J]. Journal of Systems Engineering and Electronics, 2018, 29(4): 816-822. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||