
Journal of Systems Engineering and Electronics ›› 2022, Vol. 33 ›› Issue (5): 1151-1160.doi: 10.23919/JSEE.2022.000111
• SYSTEMS ENGINEERING • Previous Articles Next Articles
Honghong ZHANG1,2( ), Xusheng GAN1,2,*(), Shuangfeng LI1,2(), Zhiyuan CHEN1()
), Xusheng GAN1,2,*(), Shuangfeng LI1,2(), Zhiyuan CHEN1()
Received:2021-01-11
Online:2022-10-27
Published:2022-10-27
Contact:
Xusheng GAN
E-mail:anhuifuyangzhh@sina.com;gxsh15934896556@qq.com;77625747@qq.com;838115488@qq.com
About author:Supported by:Honghong ZHANG, Xusheng GAN, Shuangfeng LI, Zhiyuan CHEN. UAV safe route planning based on PSO-BAS algorithm[J]. Journal of Systems Engineering and Electronics, 2022, 33(5): 1151-1160.
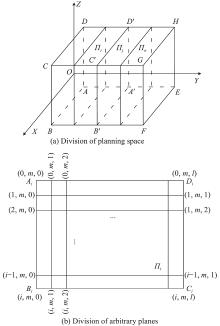
Fig 1
Schematic diagrams of division of planning space and arbitrary plane"
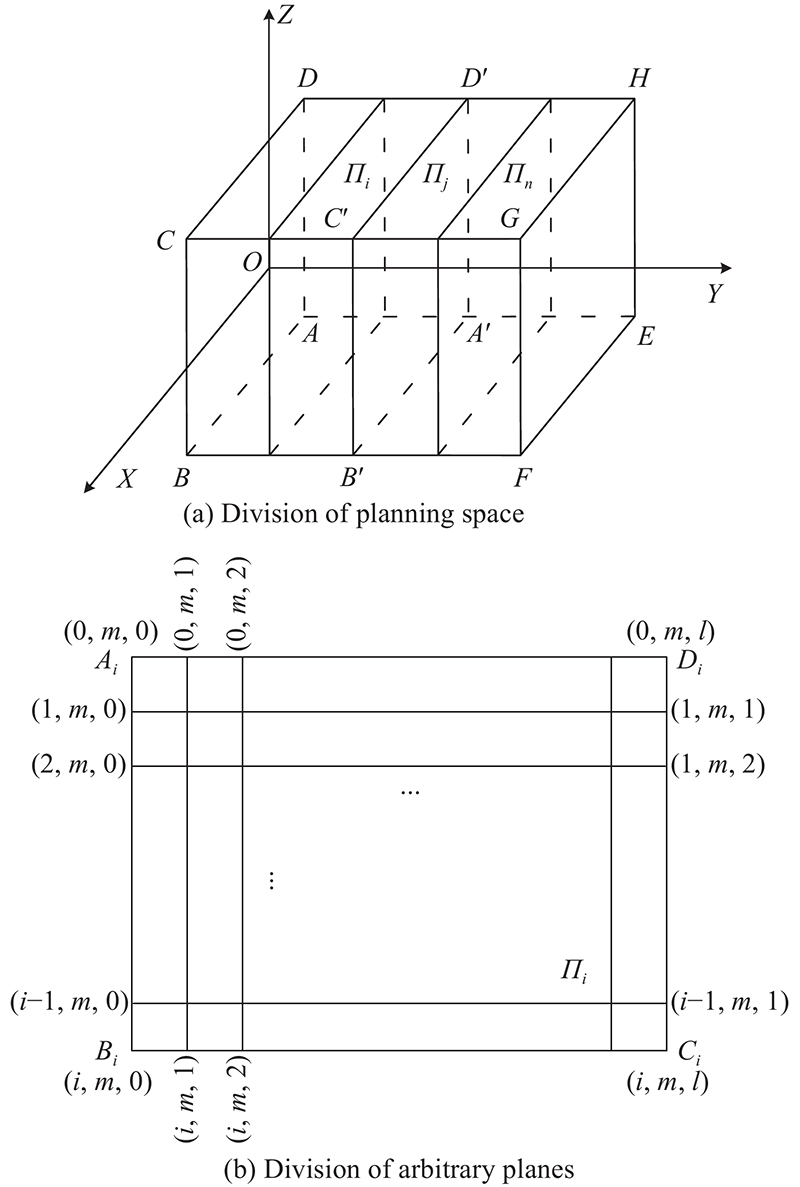
Fig 2
Schematic diagram of the killing area of falling UAV"
Table 1
Masking parameters"
| Coefficient | Shelter parameter |
| 0 | No shelter |
| 0.25 | Sparse trees |
| 0.50 | Trees or low buildings |
| 0.75 | High-rise building |
| 1 | Industrial zone |
Fig 3
Cubic B-spline curve smoothing processing"
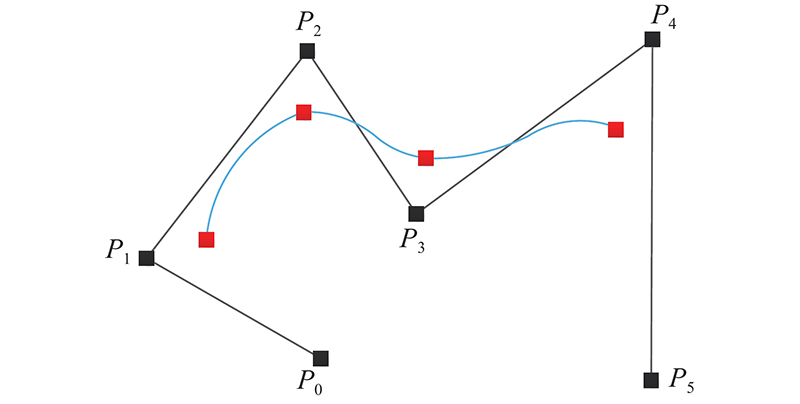

Fig 4
Map of Xidian University North Campus"

Fig 5
Route planning process based on PSO-BAS"
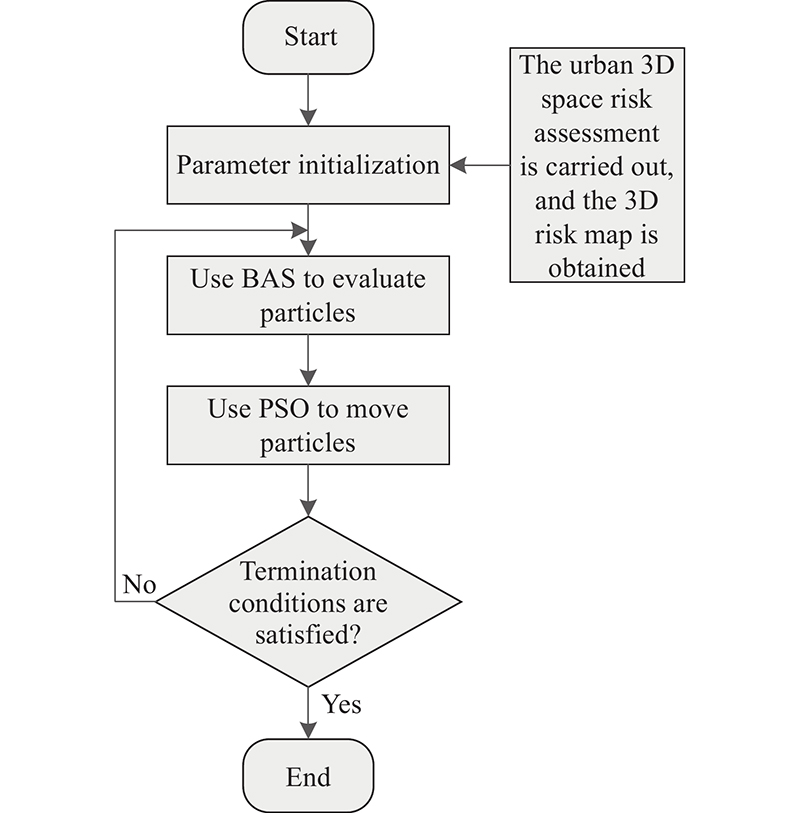
Table 2
Values of regional risk assessment parameters"
| Parameter | Value | Parameter | Value | |
| | | | | |
| m/kg | 1.38 | | 34 | |
| | | | 0.3 | |
| | 0.25 | | 8.4 | |
| | 1.65 | | 0.1 | |
| | 0.2 | | 3 | |
| | 16 | T | 3 | |
| | | 3 | ||
| | 0.018 8 | — | — |
Table 3
PSO-BAS algorithm required parameters"
| Parameter | Value | Parameter | Value | |
| | 20 | | 1.5 | |
| | 0.5 | | 2 | |
| | 0.2 | | 3 | |
| | 200 | | 0.95 | |
| | 1 | | 0.95 |
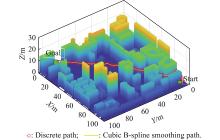
Fig 6
Schematic diagram of low-altitude airspace route planning"
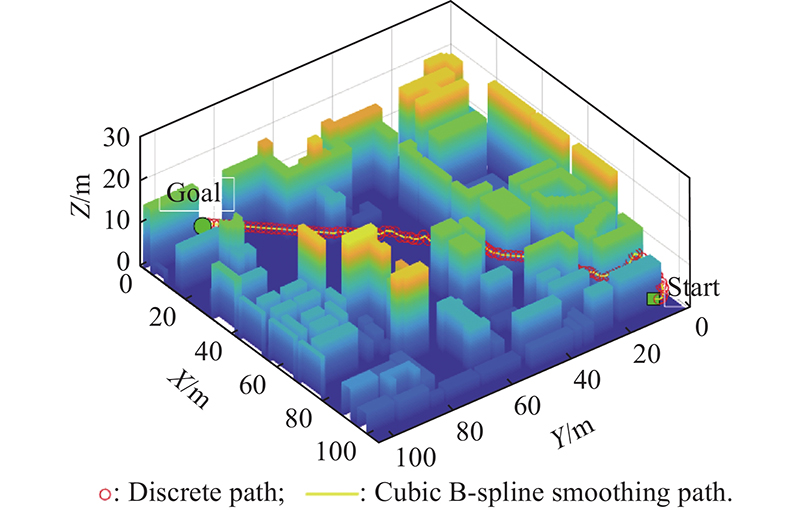
Fig 7
Curvature change of space track"
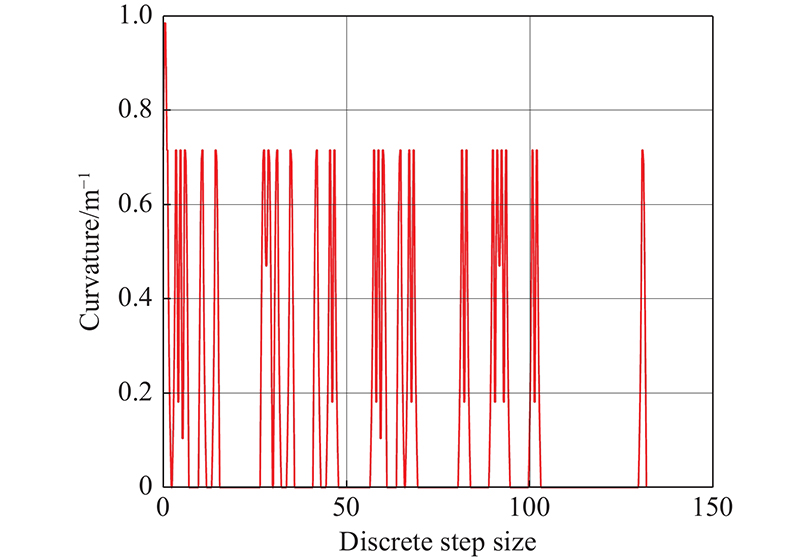
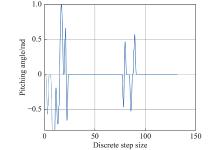
Fig 8
Spatial track elevation angle variation"
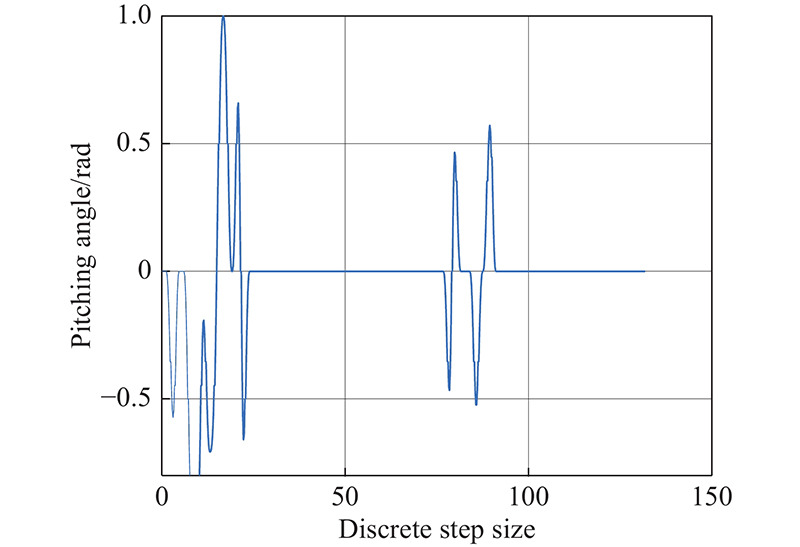
Fig 9
Comparison of different planning algorithm tracks"
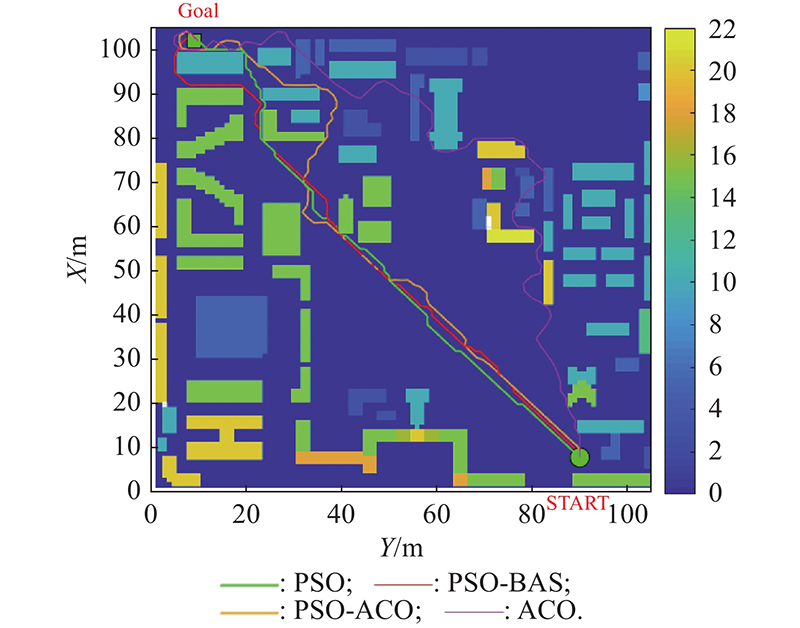
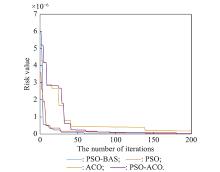
Fig 10
Search process of different solving algorithms"
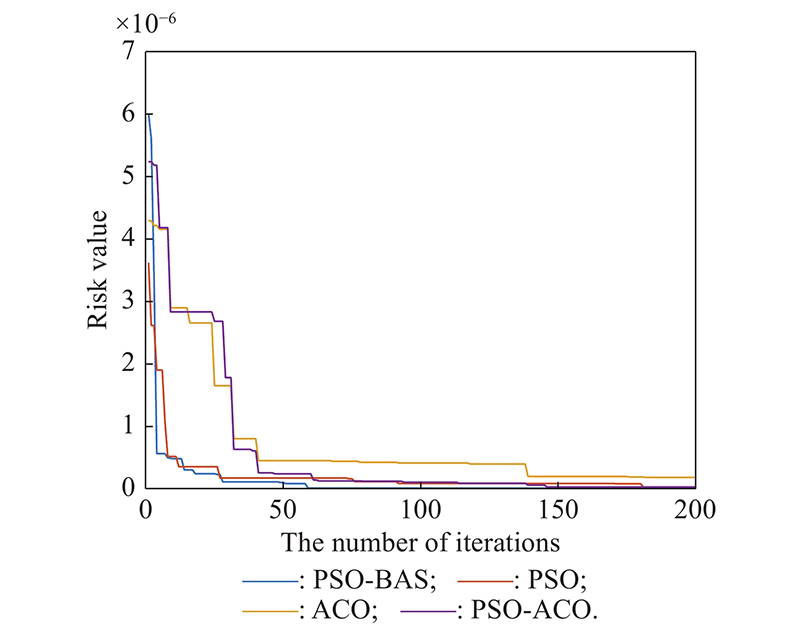
Table 4
Performance comparison of route planning methods"
| Type | Path risk value | Path length/m |
| Planning methods considering risk assessment | | 156.74 |
| Planning methods without considering risk assessment | | 136.48 |
| 1 | QUAN Q, LI G, BAI Y Q, et al An overview and suggestions on traffic management of low-altitude UAV. Acta Aeronautica et Astronautica Sinica, 2020, 41 (1): 6- 34. |
| 2 | ZHANG Q R, WEI R X, HE R K, et al Flight path planning of urban dense irregular obstacle space UAV. Control Theory & Applications, 2015, 32 (10): 1407- 1413. |
| 3 | LEVASSEUR B, BERTRAND S, RABALLAND N, et al. Accurate ground impact footprints and probabilistic maps for risk analysis of UAV missions. Proc. of the IEEE Aerospace Conference, 2019. DOI: 10.1109/AERO.2019.8741718. |
| 4 | LUO Q, WANG H B, ZHENG Y, et al Research on path planning of mobile robot based on improved ant colony algorithm. Neural Computing and Applications, 2020, 32 (6): 1555- 1566. |
| 5 | BAO S T, LU Y G, et al Research on path planning of UAV based on ant colony algorithm with angle factor. Journal of Physics: Conference Series, 2020, 1627 (1): 1- 8. |
| 6 | XU Z, ZHANG E Z, CHEN Q W Rotary unmanned aerial vehicles path planning in rough terrain based on multi-objective particle swarm optimization. Journal of Systems Engineering and Electronics, 2020, 31 (1): 130- 141. |
| 7 | ZHANG Q Q, WANG Z Y, ZHANG H H, et al A complex low-altitude multi-aircraft conflict resolution method based on SMILO-VTAC model. Journal of Traffic and Transportation Engineering, 2019, 19 (6): 125- 136. |
| 8 | SARIM M, RADMANESH M, DECHERING M, et al Distributed detect-and-avoid for multiple unmanned aerial vehicles in national airspace. Journal of Dynamic Systems, Measurement and Control, 2019, 141 (7): 071014. |
| 9 | FAN X J, GUO Y J, LIU H, et al. Improved Artificial Potential Field Method Applied for AUV Path Planning. Mathematical Problems in Engineering, 2020: 6523158. DOI: 10.1155/2020/6523158. |
| 10 |
ANGEL M, ABDULLA A, DAVID M, et al 3D Trajectory planning method for UAVs swarm in building emergencies. Sensors, 2020, 20 (3): 642.
doi: 10.1109/JSEN.2020.2964488 |
| 11 | ZHANG Y Y, LI S, GUO H L A type of biased consensus-based distributed neural network for path planning. Nonlinear Dynamics, 2017, 89, 1803- 1815. |
| 12 | CHANG Y, WANG Y Q, ALSAADI F E, et al Adaptive fuzzy output-feedback tracking control for switched stochastic pure-feedback nonlinear systems. International Journal of Adaptive Control and Signal Processing, 2019, 33 (10): 1567- 1582. |
| 13 |
GAO X, FANG Y W, WU Y L Fuzzy Q learning algorithm for dual-aircraft path planning to cooperatively detect targets by passive radars. Journal of Systems Engineering and Electronics, 2013, 24 (5): 800- 810.
doi: 10.1109/JSEE.2013.00093 |
| 14 |
ALEXANDRA G, ESTEN I G, DAC-TU H, et al UAVs trajectory planning by distributed MPC under radio communication path loss constraints. Journal of Intelligent and Robotic Systems, 2015, 79 (1): 115- 134.
doi: 10.1007/s10846-014-0090-1 |
| 15 |
WU J F, WANG H L, LI N, et al Distributed trajectory optimization for multiple solar-powered UAVs target tracking in urban environment by adaptive grasshopper optimization algorithm. Aerospace Science and Technology, 2017, 70, 497- 510.
doi: 10.1016/j.ast.2017.08.037 |
| 16 | GUAN X M, LU R L A conflict resolution method for complex low-altitude flight based on satisfactory game theory. Acta Aeronautica et Astronautica Sinica, 2017, 38 (S1): 120- 128. |
| 17 | SISLAK D Agent-based cooperative decentralized airplane-collision avoidance. IEEE Trans. on Intelligent Transportations Systems, 2011, 12 (1): 36- 46. |
| 18 | PRIMATESTA S, GUGLIERI G, RIZZO A A risk aware path planning strategy for UAVs in urban environments. Journal of Intelligent & Robotic Systems, 2019, 95 (2): 629- 643. |
| 19 | ZHANG H H, GAN X S, WU Y R, et al. Evaluation of safety target level of UAV system based on Monte-Carlo. http://kns.cnki.net/kcms/detail/41.1227.TN.20201016.0848.002.html. (in Chinese) |
| 20 | HU X T, WU YU. Risk-based discrete multi-path planning method for UAVs in urban environments. http://kns.cnki.net/kcms/detail/11.1929.V.20200821.1328.006.html. |
| 21 |
KOH C H, LOW K H, LI L, et al Weight threshold estimation of falling UAVs (unmanned aerial vehicles) based on impact energy. Transportation Research Part C: Emerging Technologies, 2018, 93, 228- 255.
doi: 10.1016/j.trc.2018.04.021 |
| 22 | ZHANG Z J, ZHANG S G, LIU X, et al Estimated method of target level of safety for unmanned aircraft system. Journal of Aerospace Power, 2018, 33 (4): 1017- 1024. |
| 23 | ZHANG X J, LIU Y, ZHANG Y. Safety Assessment and Risk Estimation for Unmanned Aerial Vehicles Operating in National Airspace System. Journal of Advanced Transportation, 2018: 4731585. DOI: 10.1155/2018/4731585. |
| 24 | LI Q H, WEI A X, ZHANG Z H Application of economic load distribution of power system based on BAS-PSO. IOP Conference Series: Materials Science and Engineering, 2019, 490 (7): 2727. |
| 25 | FAN Y Q, SHAO J P, SUN G T Optimized PID controller based on beetle antennae search algorithm for electro-hydraulic position servo control system. Sensors, 2020, 902, 54- 64. |
| 26 | NGOC H T, ANH D N, THANH N N A genetic algorithm application in planning path using B-Spline model for autonomous underwater vehicle (AUV). Applied Mechanics and Materials, 2020, 4796, 54- 64. |
| [1] | Jun CHEN, Xudong GAO, Jia RONG, Xiaoguang GAO. A situation awareness assessment method based on fuzzy cognitive maps [J]. Journal of Systems Engineering and Electronics, 2022, 33(5): 1108-1122. |
| [2] | Bing WANG, Pengfei ZHANG, Yufeng HE, Xiaozhi WANG, Xianxia ZHANG. Scenario-oriented hybrid particle swarm optimization algorithm for robust economic dispatch of power system with wind power [J]. Journal of Systems Engineering and Electronics, 2022, 33(5): 1143-1150. |
| [3] | Yangjun GAO, Guangyun LI, Zhiwei LYU, Lundong ZHANG, Zhongpan LI. Improved adaptively robust estimation algorithm for GNSS spoofer considering continuous observation error [J]. Journal of Systems Engineering and Electronics, 2022, 33(5): 1237-1248. |
| [4] | Yuan ZENG, Wenbin LU, Bo YU, Shifei TAO, Haosu ZHOU, Yu CHEN. Improved IMM algorithm based on support vector regression for UAV tracking [J]. Journal of Systems Engineering and Electronics, 2022, 33(4): 867-876. |
| [5] | Jianwei SUN, Chao WANG, Qingzhan SHI, Wenbo REN, Zekun YAO, Naichang YUAN. Intelligent optimization methods of phase-modulation waveform [J]. Journal of Systems Engineering and Electronics, 2022, 33(4): 916-923. |
| [6] | Dongju CAO, Wendong YANG, Hui CHEN, Yang WU, Xuanxuan TANG. Energy efficiency maximization for buffer-aided multi-UAV relaying communications [J]. Journal of Systems Engineering and Electronics, 2022, 33(2): 312-321. |
| [7] | Yangyang JIANG, Yan GAO, Wenqi SONG, Yue LI, Quan QUAN. Bibliometric analysis of UAV swarms [J]. Journal of Systems Engineering and Electronics, 2022, 33(2): 406-425. |
| [8] | Zihang DING, Junwei XIE, Zhengjie LI. Adaptive transmit beamspace optimization design based on RD-log-FDA radar [J]. Journal of Systems Engineering and Electronics, 2022, 33(1): 91-96. |
| [9] | Jinqiang HU, Husheng WU, Renjun ZHAN, Rafik MENASSEL, Xuanwu ZHOU. Self-organized search-attack mission planning for UAV swarm based on wolf pack hunting behavior [J]. Journal of Systems Engineering and Electronics, 2021, 32(6): 1463-1476. |
| [10] | Ziquan YU, Youmin ZHANG, Bin JIANG. PID-type fault-tolerant prescribed performance control of fixed-wing UAV [J]. Journal of Systems Engineering and Electronics, 2021, 32(5): 1053-1061. |
| [11] | Juan Antonio VAZQUEZ TREJO, Adrien GUENARD, Manuel ADAM-MEDINA, Jean-Christophe PONSART, Laurent CIARLETTA, Damiano ROTONDO, Didier THEILLIOL. Event-triggered leader-following formation control for multi-agent systems under communication faults: application to a fleet of unmanned aerial vehicles [J]. Journal of Systems Engineering and Electronics, 2021, 32(5): 1014-1022. |
| [12] | Tao YE, Zongyang ZHAO, Jun ZHANG, Xinghua CHAI, Fuqiang ZHOU. Low-altitude small-sized object detection using lightweight feature-enhanced convolutional neural network [J]. Journal of Systems Engineering and Electronics, 2021, 32(4): 841-853. |
| [13] | Shiyun LI, Sheng ZHONG, Zhi PEI, Wenchao YI, Yong CHEN, Cheng WANG, Wenzhu ZHANG. Multi-objective reconfigurable production line scheduling for smart home appliances [J]. Journal of Systems Engineering and Electronics, 2021, 32(2): 297-317. |
| [14] | Zhifei XI, An XU, Yingxin KOU, Zhanwu LI, Aiwu YANG. Target maneuver trajectory prediction based on RBF neural network optimized by hybrid algorithm [J]. Journal of Systems Engineering and Electronics, 2021, 32(2): 498-516. |
| [15] | Yuxiao KANG, Shuhua MAO, Yonghong ZHANG, Huimin ZHU. Fractional derivative multivariable grey model for nonstationary sequence and its application [J]. Journal of Systems Engineering and Electronics, 2020, 31(5): 1009-1018. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||