
Journal of Systems Engineering and Electronics ›› 2022, Vol. 33 ›› Issue (5): 1079-1088.doi: 10.23919/JSEE.2022.000105
• ELECTRONICS TECHNOLOGY • Previous Articles Next Articles
Xu LYU1,2( ), Baiqing HU1(), Yongbin DAI3(), Mingfang SUN4,*(), Yi LIU1(), Duanyang GAO1()
), Baiqing HU1(), Yongbin DAI3(), Mingfang SUN4,*(), Yi LIU1(), Duanyang GAO1()
Received:2020-12-14
Online:2022-10-27
Published:2022-10-27
Contact:
Mingfang SUN
E-mail:lvclay@163.com;hubaiqing2005@163.com;dyb16@163.com;sunmf125@163.com;565175757@qq.com;gdyhgn@163.com
About author:Supported by:Xu LYU, Baiqing HU, Yongbin DAI, Mingfang SUN, Yi LIU, Duanyang GAO. Gaussian process regression-based quaternion unscented Kalman robust filter for integrated SINS/GNSS[J]. Journal of Systems Engineering and Electronics, 2022, 33(5): 1079-1088.
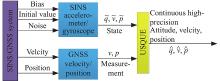
Fig 1
SINS/GPS integrated navigation system"
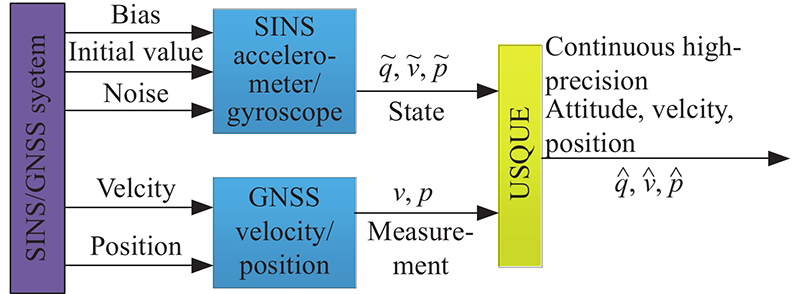
Fig 2
The GPR innovation process of robust USQUE"
Fig 3
The simulation trajectory"
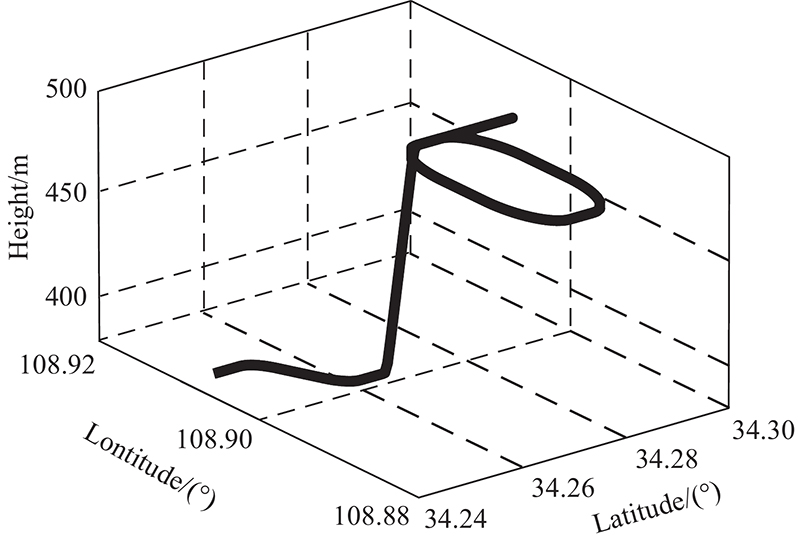
Fig 4
Change of attitude"
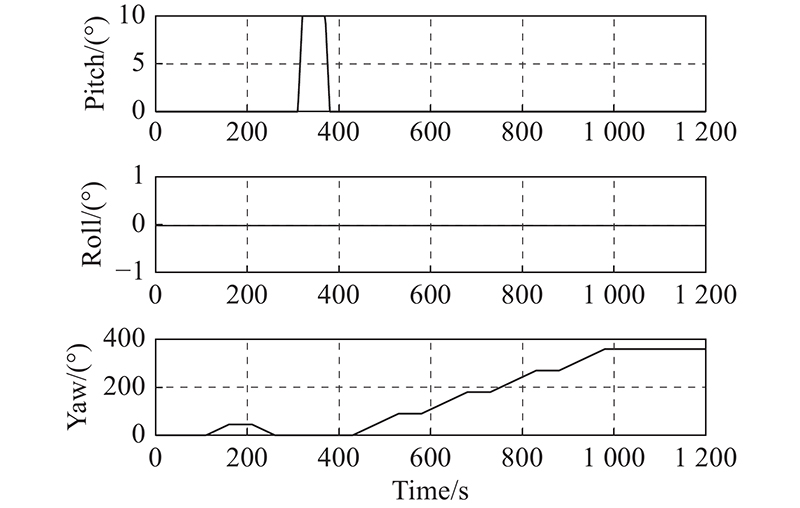
Fig 5
Change of velocity"
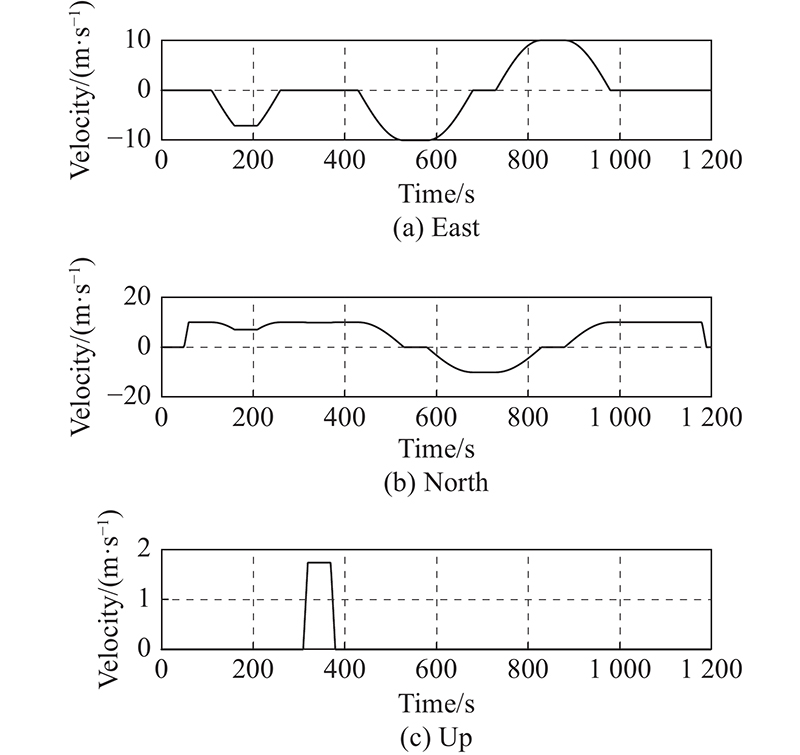
Fig 6
Position error of GPR-USQUE"
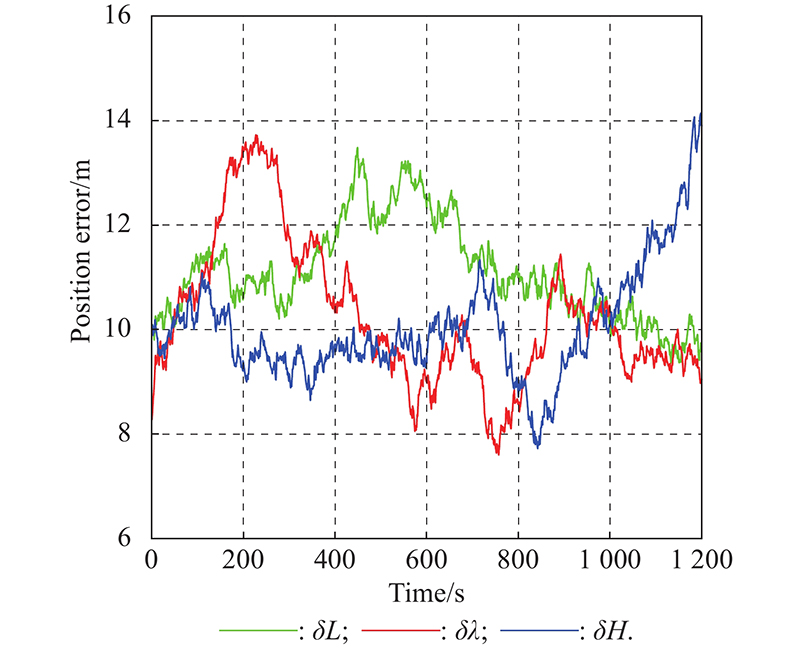
Fig 7
Pitch estimate errors"
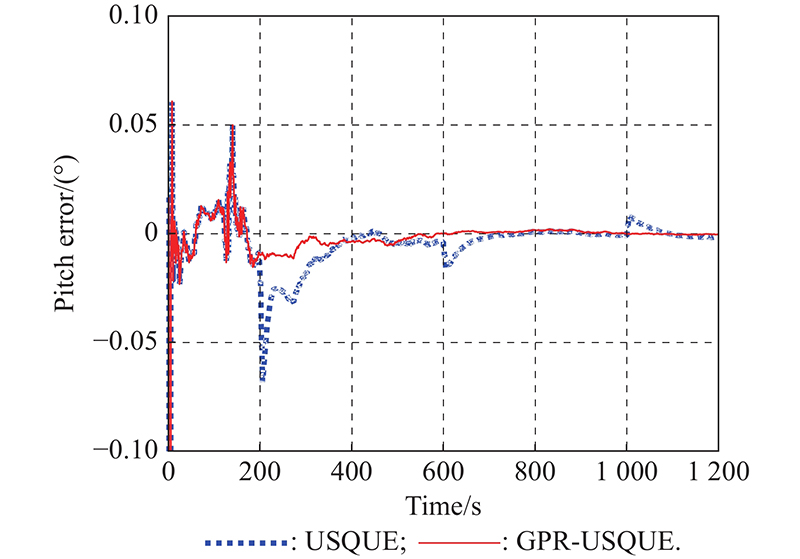
Fig 8
Roll estimate errors"
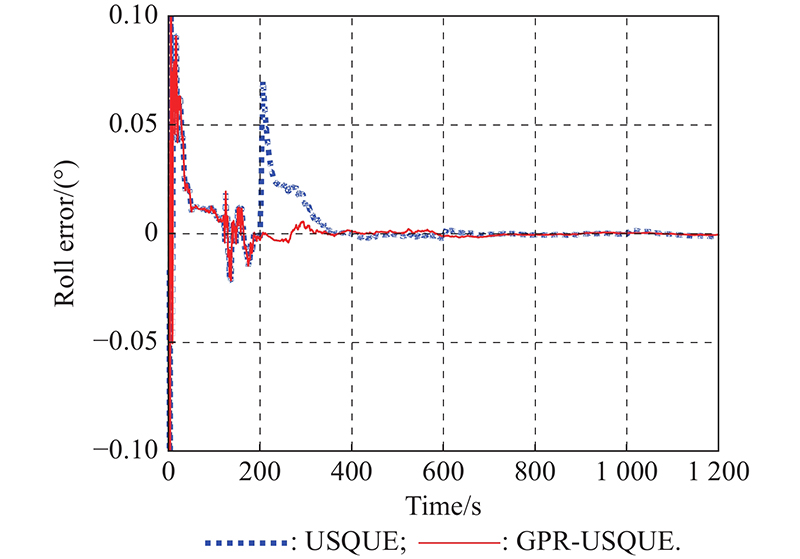
Fig 9
Yaw estimate errors"
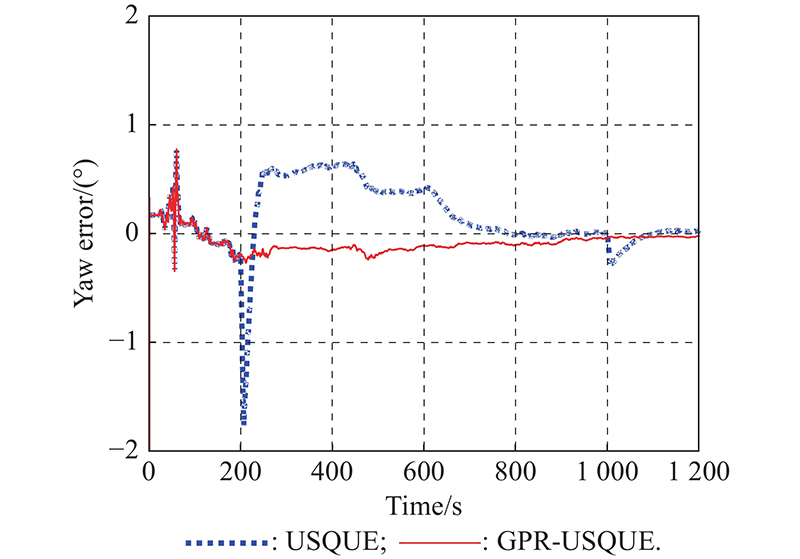

Fig 10
Test trajectory around the sports grounds"
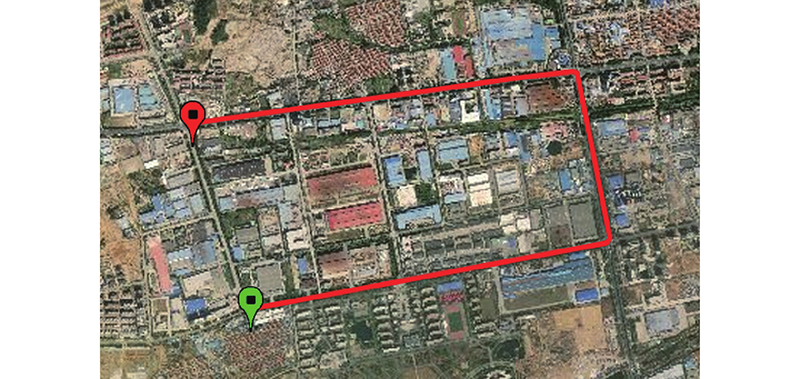
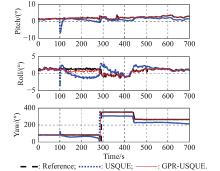
Fig 11
Attitude estimate"
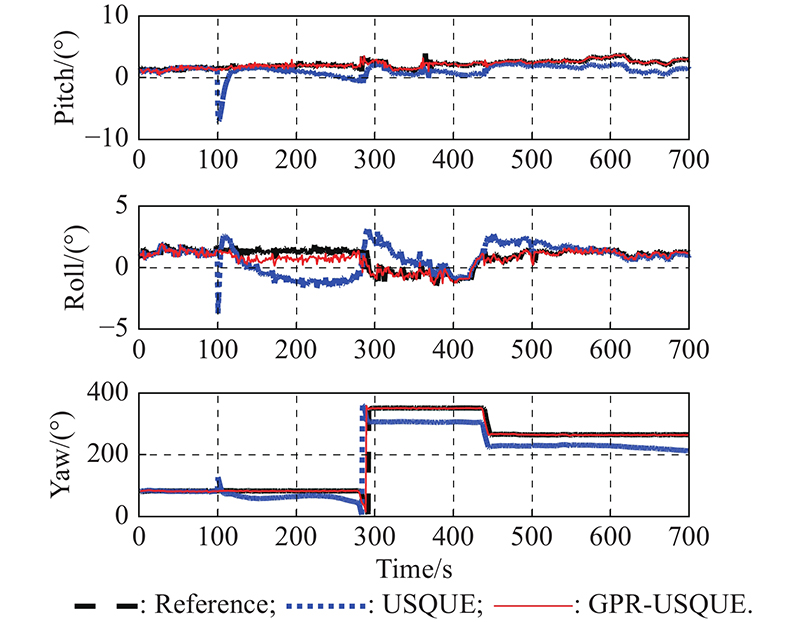
Fig 12
Attitude estimate errors"
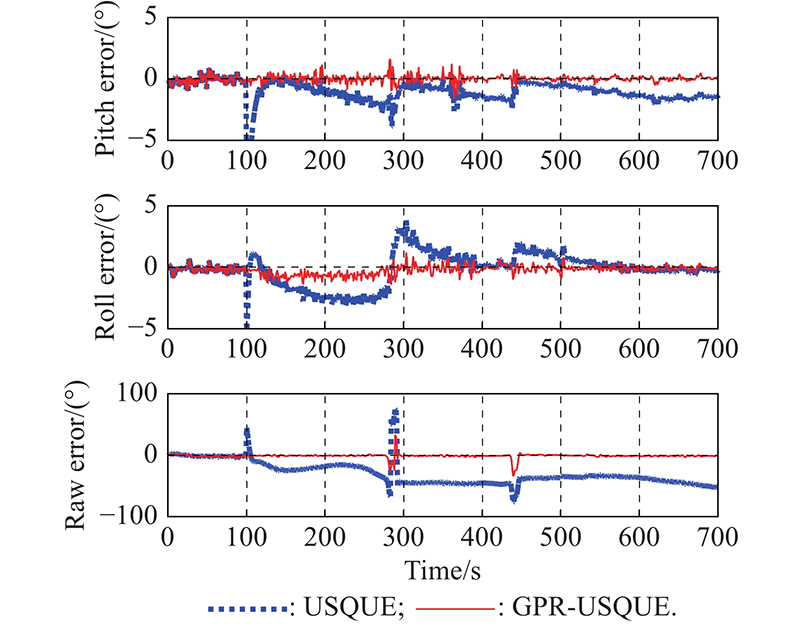

Fig 13
Velocity estimate errors"
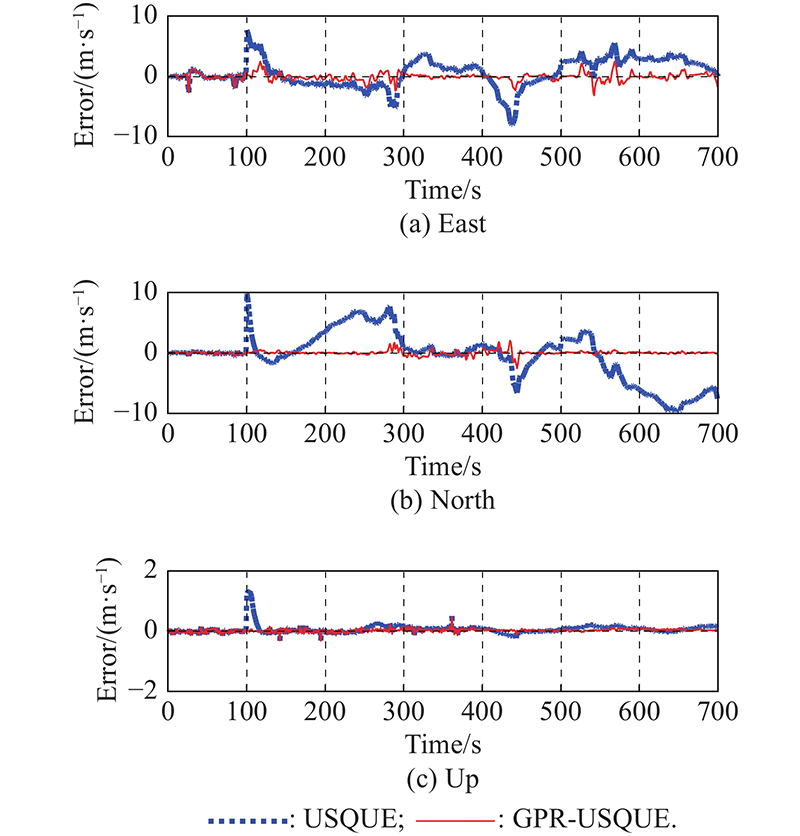
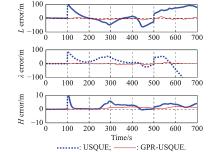
Fig 14
Position estimate errors"
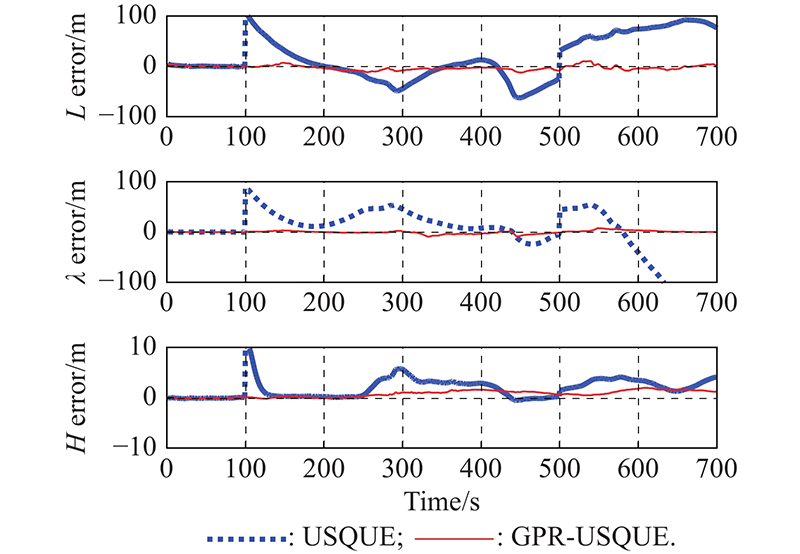
Table 1
Mean values and mean variances of errors of attitude"
| Algorithm | Mean | Mean variance | |||
| USQUE | GPR-USQUE | USQUE | GPR-USQUE | ||
| Pitch | 1.0394 | 0.1963 | 1.9027 | 0.0858 | |
| Roll | 0.9617 | 0.3087 | 1.7816 | 0.1711 | |
| Yaw | 30.9339 | 1.5175 | 1228.1 | 16.0466 | |
| 1 | WANG M S, WU W X, ZHOU P Y, et al. State transformation extended Kalman filter for GPS/SINS tightly coupled integration. GPS Solutions, 2018, 22(4): 112−124. |
| 2 | HU G G, GAO S S, ZHONG Y M. A derivative UKF for tightly coupled INS/GPS integrated navigation. ISA Transactions, 2015, 56(2): 135−144. |
| 3 | YAN G M. Strapdown inertial navigation system algorithm and integrated navigation principle. Xi ’an: Northwestern Polytechnical University Press, 2019. |
| 4 | KALMAN R E. Canonical structure of linear dynamical systems. Proceedings of the National of Academy Sciences, 1962, 48(4): 596−600. |
| 5 | LI Y Y, WANG H, HOU C H. UKF based nonlinear filtering using minimum entropy criterion. IEEE Trans. on Signal Processing, 2013, 61(20): 4988−4999. |
| 6 | GUSTAFSSON F, HENDEBY G. Some relations between extended and unscented Kalman filters. IEEE Trans. on Signal Processing, 2012, 60(2): 545−555. |
| 7 | JULIER S, UHLMANN J, DURRANT WHITE H. A new method for the nonlinear transformation of means and covariances in filters and estimators. IEEE Trans. on Automatic Control, 2001, 45(3): 477−482 |
| 8 | LEFFERTS E J, MARKLEY F L, SHUSTER M D. Unscented filtering for spacecraft attitude estimation. Journal of Guidance, Control and Dynamics, 2003, 26(4): 536−542. |
| 9 | LI K L, HU B Q, CHANG L B. Modified quaternion unscented Kalman filter. Systems Engineering and Electronics, 2016, 38(6): 1399−1404. (in Chinese) |
| 10 | ZHANG M, LI K L, HU B Q, et al. Comparison of Kalman filters for inertial integrated navigation. Sensors, 2019, 19(6): 1426−1452. |
| 11 | GUPTA M, BEHERA L, SUBRAMANIAN V K, et al. A robust visual human detection approach with UKF-based motion tracking for a mobile robot. IEEE Systems Journal, 2015, 9(4): 1363−1375. |
| 12 | LUO K X, WU M P, FAN Y. Robust adaptive filtering based on maximum entropy method and its application. Systems Engineering and Electronics, 2020, 42(3): 667−673. |
| 13 | LIU Q, XU X S, HAN B. An integrated navigation method based on SINS/DVL-WT for AUV. Applied Mechanics and Materials, 2013, 303(2): 904−907. |
| 14 | CHANG G B. Robust Kalman filtering based on Mahalanobis distance as outlier judging criterion. Journal of Geodesy, 2014, 88(4): 391−401. |
| 15 | LI W L, SUN S H, JIA Y M, et al. Robust unscented Kalman filter with adaptation of process and measurement noise covariances. Digital Signal Processing, 2016, 48: 93–103. |
| 16 |
ZHENG B Q, FU P C, LI B Q, et al A robust adaptive unscented Kalman filter for nonlinear estimation with uncertain noise covariance. Sensors, 2018, 18 (3): 808- 823.
doi: 10.3390/s18030808 |
| 17 | CHANG L B, HU B Q, CHANG G B, et al. Multiple outliers suppression derivative-free filter based on unscented transformation. Journal of Guidance, Control & Dynamics, 2015, 35(6): 1902−1907. |
| 18 | YE W, CAI C G, YANG P, et al. UKF estimation method incorporating Gaussian process regression. Journal of Beijing University of Aeronautics and Astronautics, 2019, 45(6): 1081−1087. |
| 19 | HE Z K, LIU G B, ZHAO X J, et al. Overview of Gaussian process regression. Control and Decision, 2013, 28(8): 1121−1129. (in Chinese) |
| 20 | QIN F J, CHANG L B, HU B Q, et al. Strapdown inertial navigation system alignment based on marginalised unscented Kalman filter. IET Science, Measurement & Technology, 2013, 7(2): 128−138. |
| 21 | CHANG L B, HU B Q, CHANG G B. Modified unscented quaternion estimator based on quaternion averaging. Journal of Guidance, Control, and Dynamics, 2014, 37(1): 305−309. |
| 22 | ZHANG L, LIU Z, ZHANG J Q. A genetic Gaussian process regression model based on memetic algorithm. Journal of Central South University, 2013, 20(11): 3085−3093. (in Chinese) |
| 23 |
LEHEL C, MANFRED O Sparse online Gaussian processes. Neural Computation, 2002, 14 (3): 641- 669.
doi: 10.1162/089976602317250933 |
| 24 | RASMUSSEN C E, WILLIAMS C. Gaussian processes for machine learning. London: MIT Press, 2006. |
| [1] | Keyi LI, Zhengkun GUO, Gongjian ZHOU. State estimation in range coordinate using range-only measurements [J]. Journal of Systems Engineering and Electronics, 2022, 33(3): 497-510. |
| [2] | Shuai SHAO, Aijun LIU, Changjun YU, Quanrui ZHAO. Polarization quaternion DOA estimation based on vector MISC array [J]. Journal of Systems Engineering and Electronics, 2021, 32(4): 764-778. |
| [3] | Yue LI, Lei HE, Qunli XIA. Line-of-sight rates extraction of roll-pitch seeker under anti-infrared decoy state [J]. Journal of Systems Engineering and Electronics, 2021, 32(1): 178-196. |
| [4] | Han PENG, Ting CHENG, Xi LI. De-correlated unbiased sequential filtering based on best unbiased linear estimation for target tracking in Doppler radar [J]. Journal of Systems Engineering and Electronics, 2020, 31(6): 1167-1177. |
| [5] | Jiuyao JIANG, Jichao LI, Kewei YANG. Weapon system portfolio selection based on structural robustness [J]. Journal of Systems Engineering and Electronics, 2020, 31(6): 1216-1229. |
| [6] | Di ZHOU, Zhiheng HU, Wenxue ZHANG. Accurate estimation of line-of-sight rate under strong impact interference effect [J]. Journal of Systems Engineering and Electronics, 2020, 31(6): 1262-1273. |
| [7] | Muhammad WASIM, Ahsan ALI. Airship aerodynamic model estimation using unscented Kalman filter [J]. Journal of Systems Engineering and Electronics, 2020, 31(6): 1318-1329. |
| [8] | Yu HUANG, Lihua WU, Qiang YU. Underwater square-root cubature attitude estimator by use of quaternion-vector switching and geomagnetic field tensor [J]. Journal of Systems Engineering and Electronics, 2020, 31(4): 804-814. |
| [9] | Guang ZHAI, Yanxin WANG, Qi ZHAO. Tracking the maneuvering spacecraft propelled by swing propulsion of constant magnitude [J]. Journal of Systems Engineering and Electronics, 2020, 31(2): 370-382. |
| [10] | Xuan PENG, Xiaoping SHI, Yupeng GONG. Dual-quaternion-based modeling and control for motion tracking of a tumbling target [J]. Journal of Systems Engineering and Electronics, 2019, 30(5): 985-994. |
| [11] | Xiaolin NING, Weiping YUAN, Yanhong LIU. A tightly coupled rotational SINS/CNS integrated navigation method for aircraft [J]. Journal of Systems Engineering and Electronics, 2019, 30(4): 770-782. |
| [12] | Boyuan XIA, Qingsong ZHAO, Kewei YANG, Yajie DOU, Zhiwei YANG. Scenario-based modeling and solving research on robust weapon project planning problems [J]. Journal of Systems Engineering and Electronics, 2019, 30(1): 85-99. |
| [13] | Mahmoudreza HADAEGH, Hamid KHALOOZADEH. Modified switched IMM estimator based on autoregressive extended Viterbi method for maneuvering target tracking [J]. Journal of Systems Engineering and Electronics, 2018, 29(6): 1142-1157. |
| [14] | Zhongyi CAI, Yunxiang CHEN, Jiansheng GUO, Qiang ZHANG, Huachun XIANG. Remaining lifetime prediction for nonlinear degradation device with random effect [J]. Journal of Systems Engineering and Electronics, 2018, 29(5): 1101-1110. |
| [15] | Jie SHI, Guoqing QI, Yinya LI, Andong SHENG. Stochastic convergence analysis of cubature Kalman filter with intermittent observations [J]. Journal of Systems Engineering and Electronics, 2018, 29(4): 823-833. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||