
Journal of Systems Engineering and Electronics ›› 2025, Vol. 36 ›› Issue (2): 494-509.doi: 10.23919/JSEE.2025.000026
• SYSTEMS ENGINEERING • Previous Articles
Gang LIU1( ), Xinyuan GUO1(), Dong HUANG1(), Kezhong CHEN2(), Wu LI3,*()
), Xinyuan GUO1(), Dong HUANG1(), Kezhong CHEN2(), Wu LI3,*()
Received:2024-05-15
Online:2025-04-18
Published:2025-05-20
Contact:
Wu LI
E-mail:4350594@qq.com;812211120166@vip.hnist.edu.cn;596034082@qq.com;chenkezhongwork@126.com;12009012@hnist.edu.cn
About author:Supported by:Gang LIU, Xinyuan GUO, Dong HUANG, Kezhong CHEN, Wu LI. Multi-platform collaborative MRC-PSO algorithm for anti-ship missile path planning[J]. Journal of Systems Engineering and Electronics, 2025, 36(2): 494-509.
Add to citation manager EndNote|Reference Manager|ProCite|BibTeX|RefWorks
Fig 1
Schematic diagram of combat scenario"
Fig 2
Schematic of environmental modeling of two-to-one ASMs collaborative path planning"

Fig 3
Functional areas"
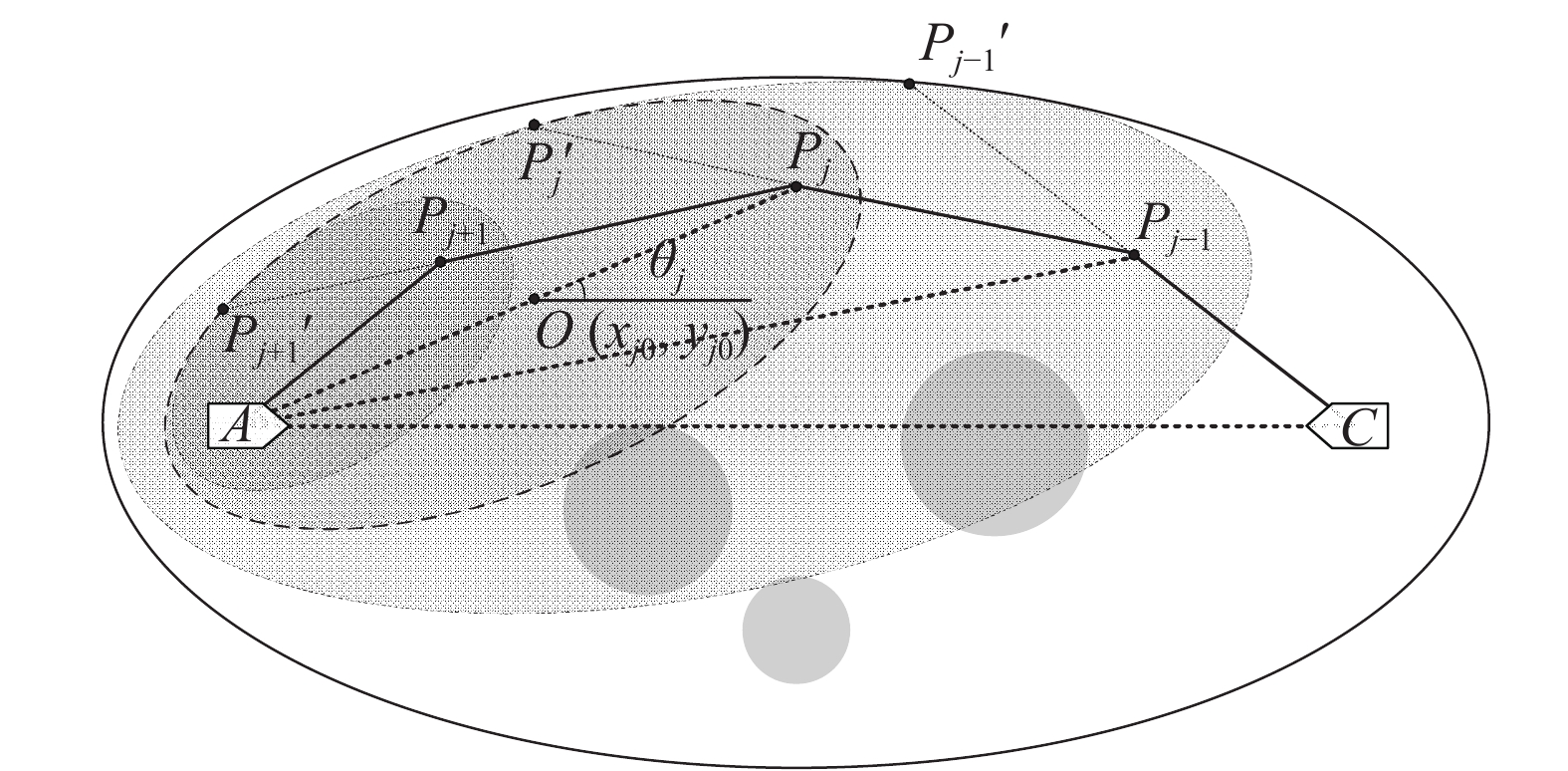
Fig 4
Schematic of path coding"
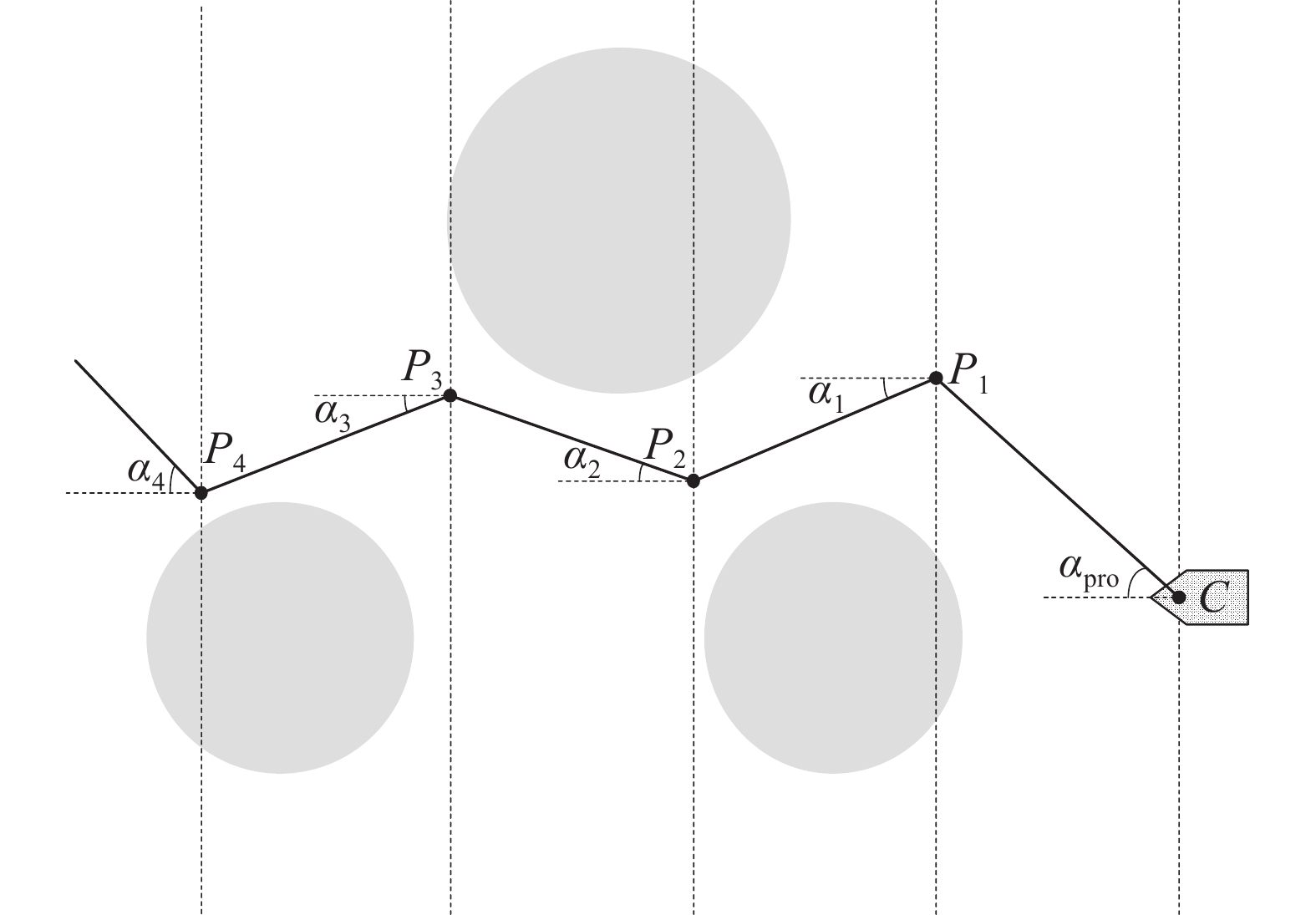

Fig 5
Circumvention operator"
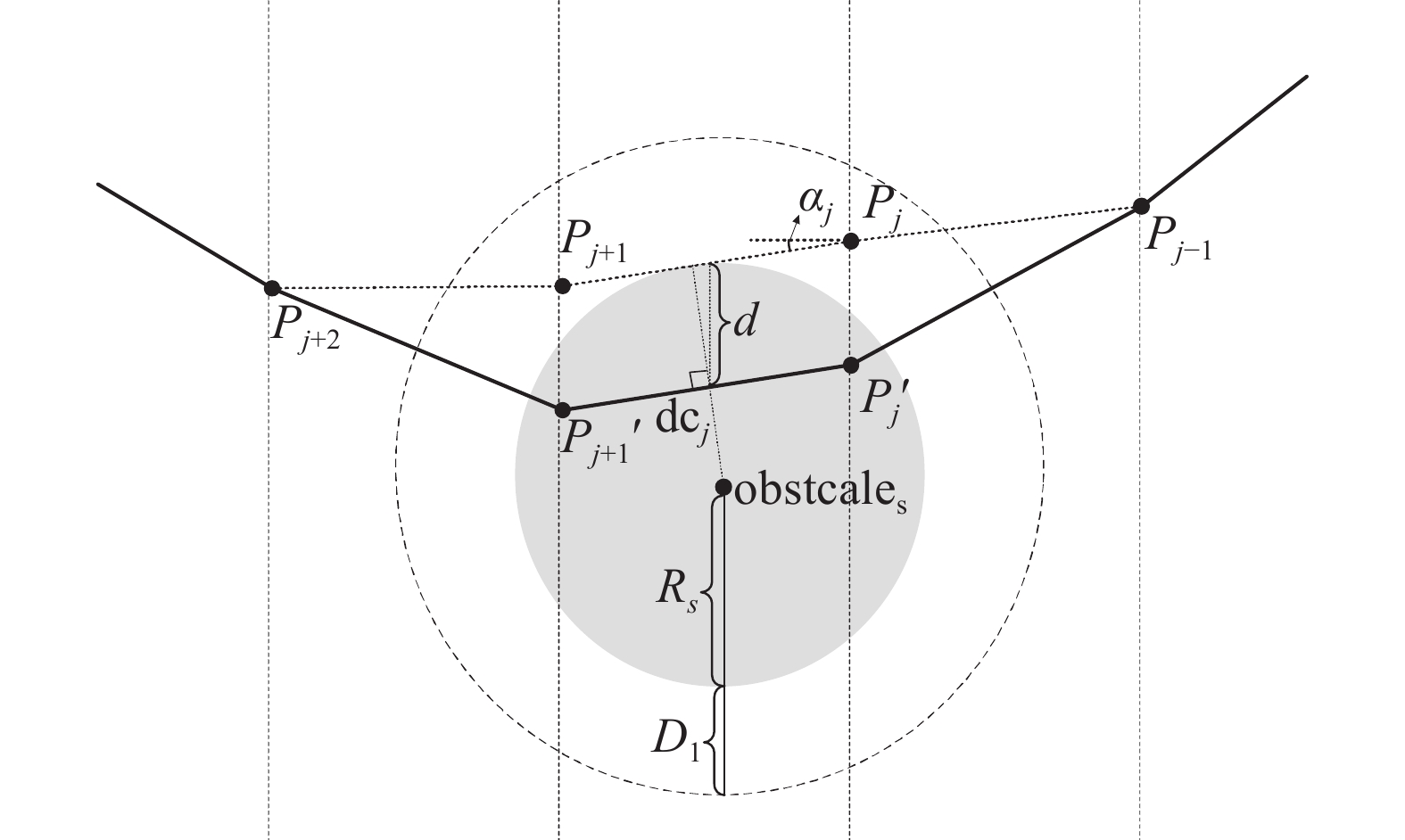
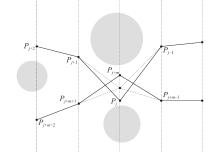
Fig 6
Synergistic arithmetic"
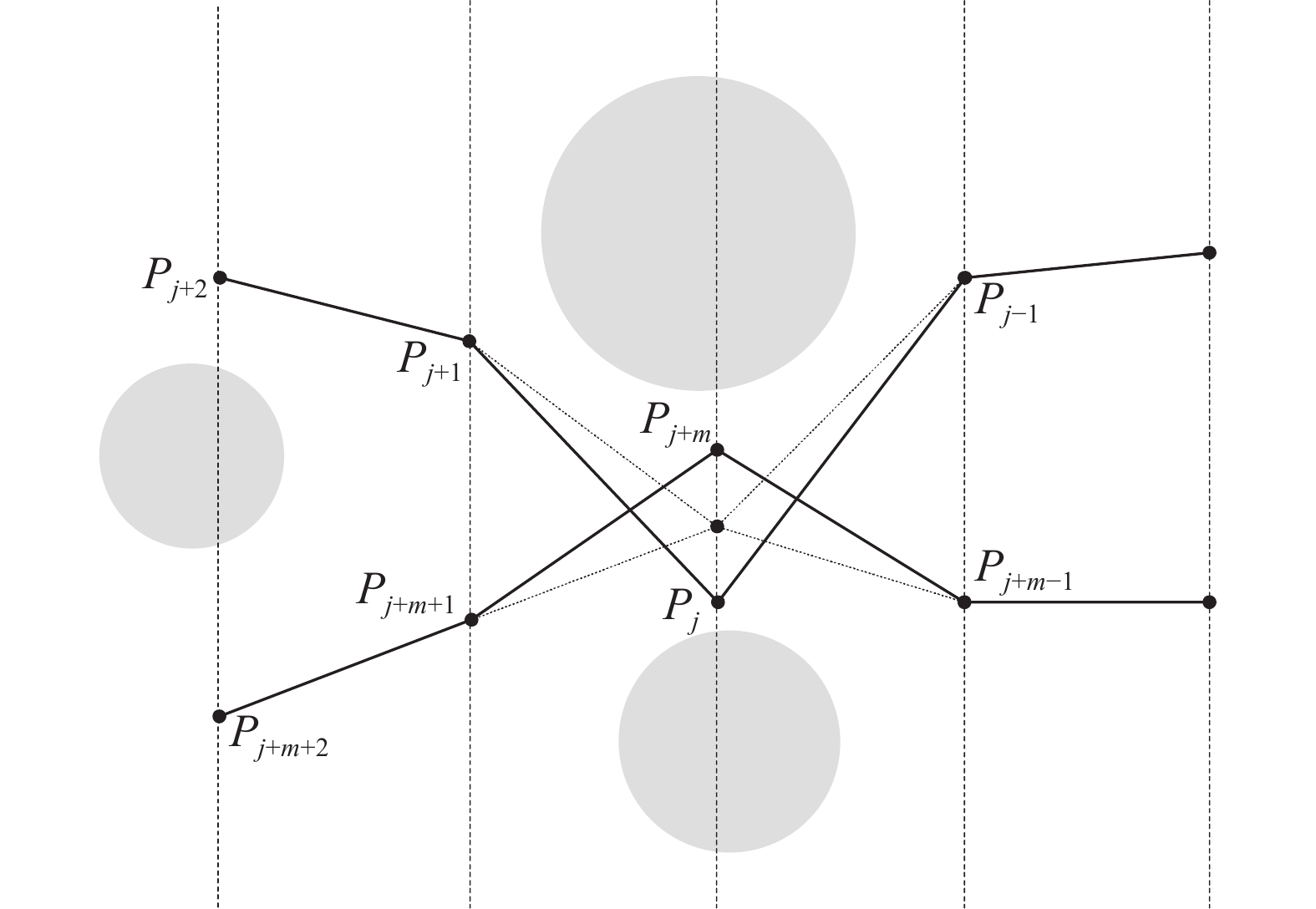
Fig 7
Smoothing operator"
Table 1
Comparison of traditional PSO, GA, OACRR-PSO, and MRC-PSO algorithms"
| Algorithm | Path information contained by particles | Path point generation method | Particle evolution method |
| PSO | One path | Random generation of horizontal and vertical coordinates in a rectangular area | Overall evolution |
| Genetic algorithm | One path | Random generation of horizontal and vertical coordinates in a rectangular area | Overall evolution |
| OACRR-PSO | One path | Random generation of horizontal and vertical coordinates within clusters of operatonal areas | Stepwise recursive evolution |
| MRC-PSO | 2 or more paths | Randomized generation of horizontal and vertical coordinates within clusters of operatonal areas | Chunked stepwise recursive evolution, local selection optimization |
Table 2
List of two-to-one environment and ship parameter settings km"
| Item | x-axis coordinates | y-axis coordinates | Radius | Maximum effective range | Minimum path distance |
| Launch ship A | 0 | 0 | − | 320 | 30 |
| Launch ship B | 120 | −70 | − | 200 | 35 |
| Target ship C | 0 | 260 | − | − | − |
| Obstacles | 75 | −10 | 20 | − | − |
| 130 | −10 | 30 | − | − | |
| 190 | −20 | 20 | − | − | |
| 180 | −80 | 10 | − | − |

Fig 8
Comparison of the simulation results of collaborative path planning in two-to-one scenario"
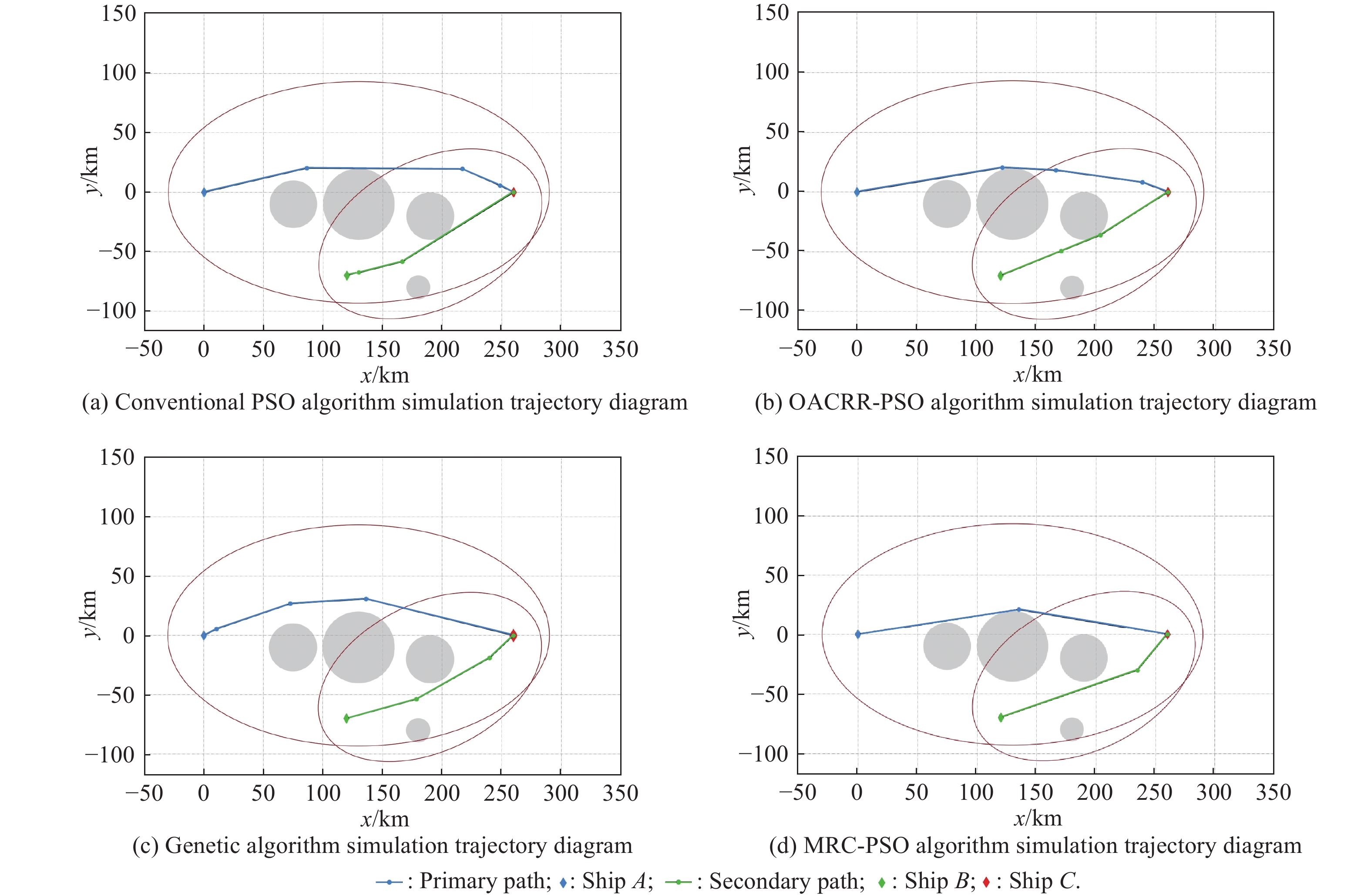
Table 3
Details of the optimal collaborative path planning results for the two-to-one scenario"
| Algorithm | Total range length | Total rotation angle | Total number of steering points | Incidence angle | Collaborative adaptation value |
| PSO | 424.673 | 1.211 | 5 | 1.012 | 0.844 |
| Genetic algorithm | 427.701 | 1.194 | 5 | 1.17 | 0.830 |
| OACRR-PSO | 421.159 | 0.724 | 5 | 0.938 | 0.836 |
| MRC-PSO | 424.341 | 0.556 | 2 | 0.954 |
Table 4
Statistics of two-to-one scenario simulation experiments"
| Algorithm | Average number of iterations | Average collaborative fitness value | Times of path crossing or invalidation | |
| PSO | Primary path | 57.760 | 0.378 | 84 |
| Secondary path | 48.640 | |||
| OACRR-PSO | Primary path | 51.120 | 0.550 | 48 |
| Secondary path | 39.750 | |||
| Genetic algorithm | Primary path | 54,729 | 0.640 | 32 |
| Secondary path | 46.345 | |||
| MRC-PSO | − | 7.909 | 0.951 | 1 |
Fig 9
MRC-PSO algorithm performs collaborative route planning in complex environments"
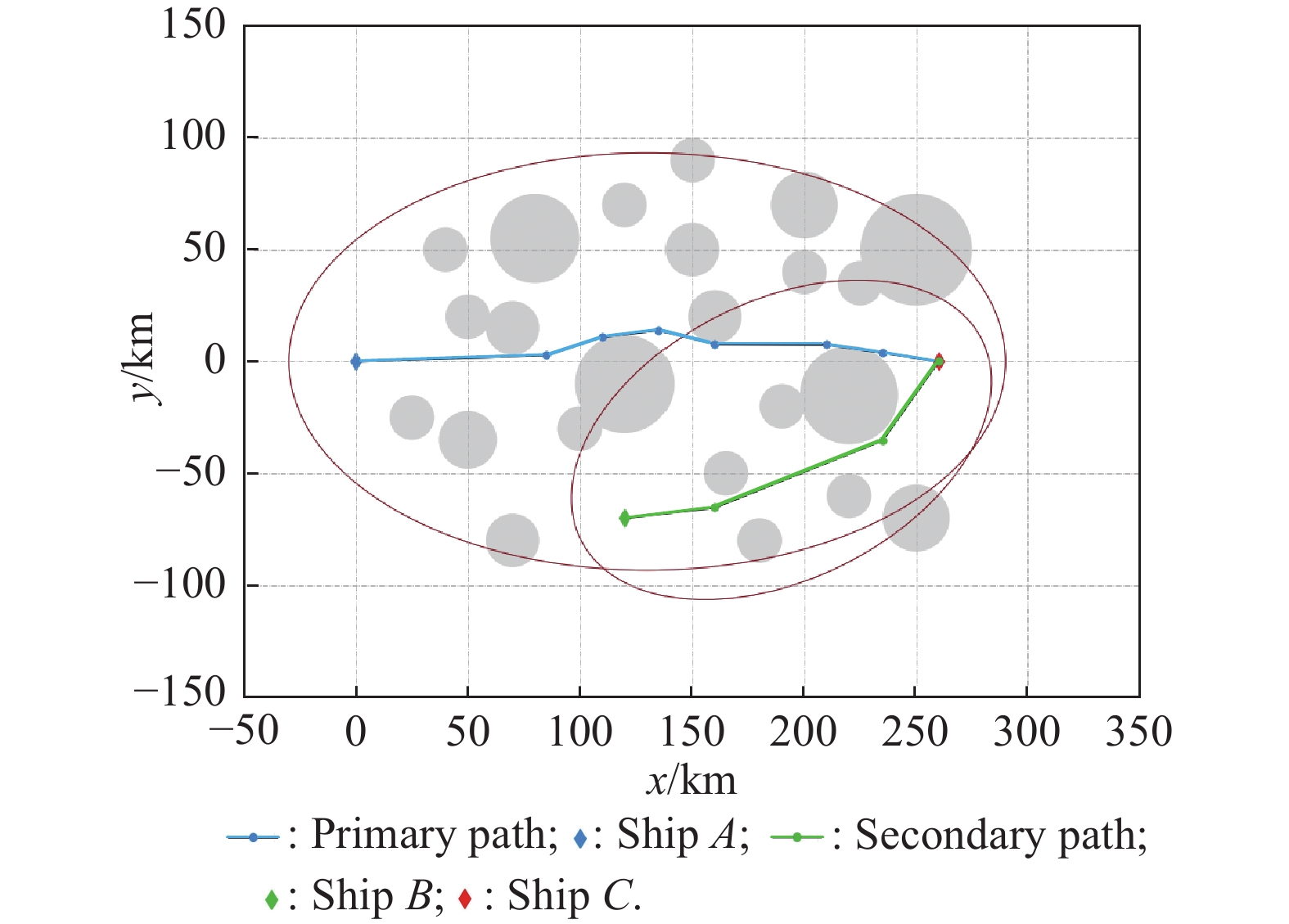
Table 5
List of three-to-two environments and ship parameter settings km"
| Item | x-axis coordinate | y-axis coordinate | Radius | Maximum effective range | Minimum path distance |
| Launch ship D | 10 | 120 | − | 320 | 35 |
| Launch ship E | 120 | 0 | − | 200 | 35 |
| Launch ship F | 0 | −100 | − | 280 | 35 |
| Target ship 1 | 260 | 50 | − | − | − |
| Target ship 2 | 220 | −100 | − | − | − |
| Obstacles | 120 | 120 | 20 | − | − |
| 100 | 120 | 10 | − | − | |
| 200 | 100 | 20 | − | − | |
| 170 | 5 | 25 | − | − | |
| 230 | −60 | 10 | − | − | |
| 180 | −80 | 10 | − | − | |
| 75 | −100 | 20 | − | − |
Table 6
List of three-to-three environments and ship parameter settings km"
| Item | x-axis coordinates | y-axis coordinates | Radius | Maximum effective range |
| Launch ship G | 10 | 150 | 300 | 35 |
| Launch ship H | 50 | 10 | 280 | 30 |
| Launch ship I | 20 | −100 | 320 | 35 |
| Target ship 3 | 260 | 120 | − | − |
| Target ship 4 | 220 | 10 | − | − |
| Target ship 5 | 250 | −120 | − | − |
Table 7
List of four-to-two environments and ship parameter settings km"
| Item | x-axis coordinates | y-axis coordinates | Radius | Maximum effective range |
| Launch ship J | 0 | 180 | 340 | 35 |
| Launch ship K | 20 | 85 | 300 | 25 |
| Launch ship L | 50 | 30 | 280 | 35 |
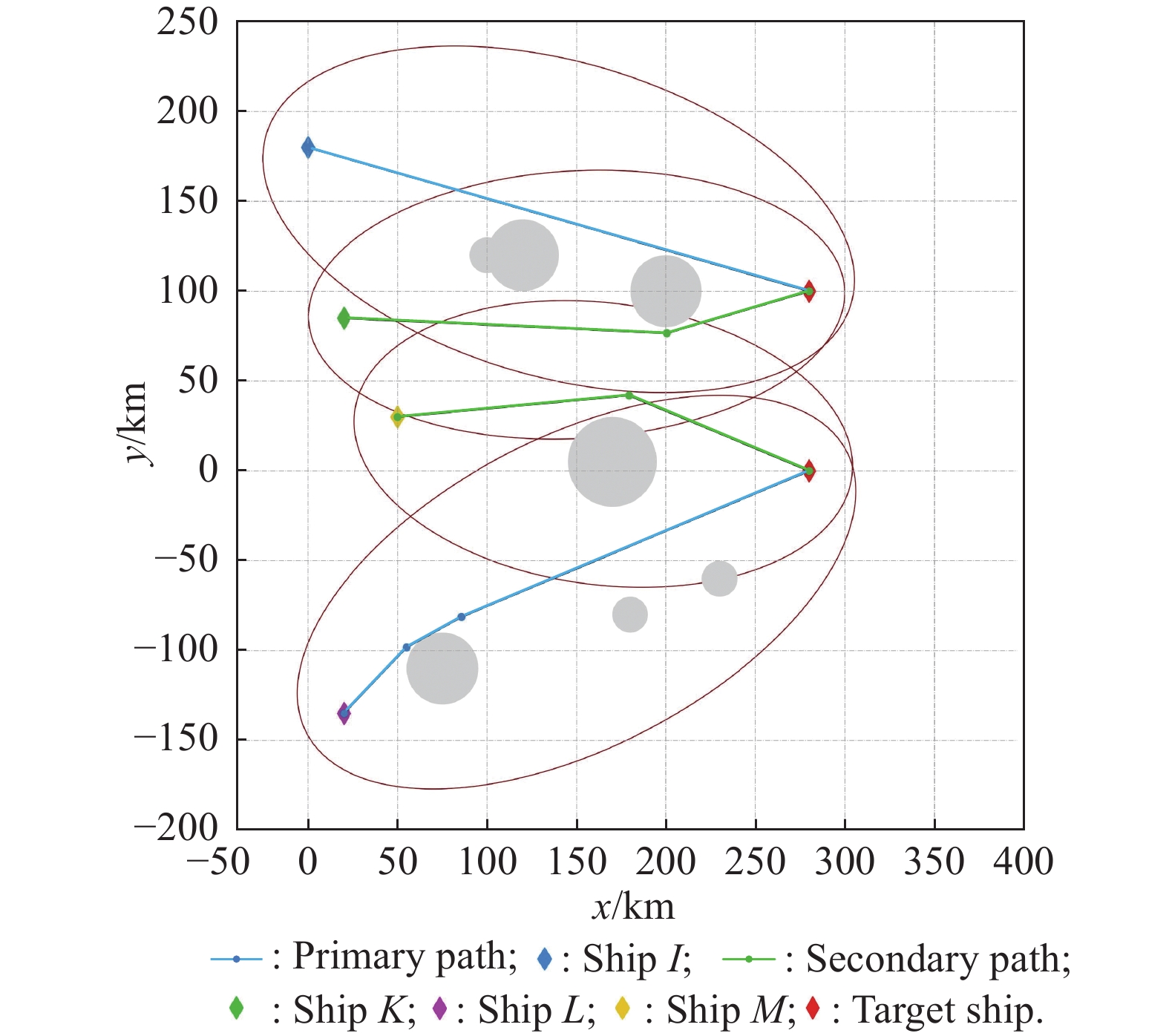
| Launch ship M | 20 | −135 | 340 | 30 |
| Target ship 6 | 280 | 100 | − | − |
| Target ship 7 | 280 | 0 | − | − |
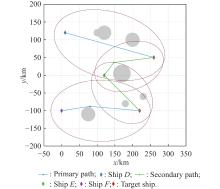
Fig 10
Simulation trajectory of collaborative path planning in three-to-two scenario"
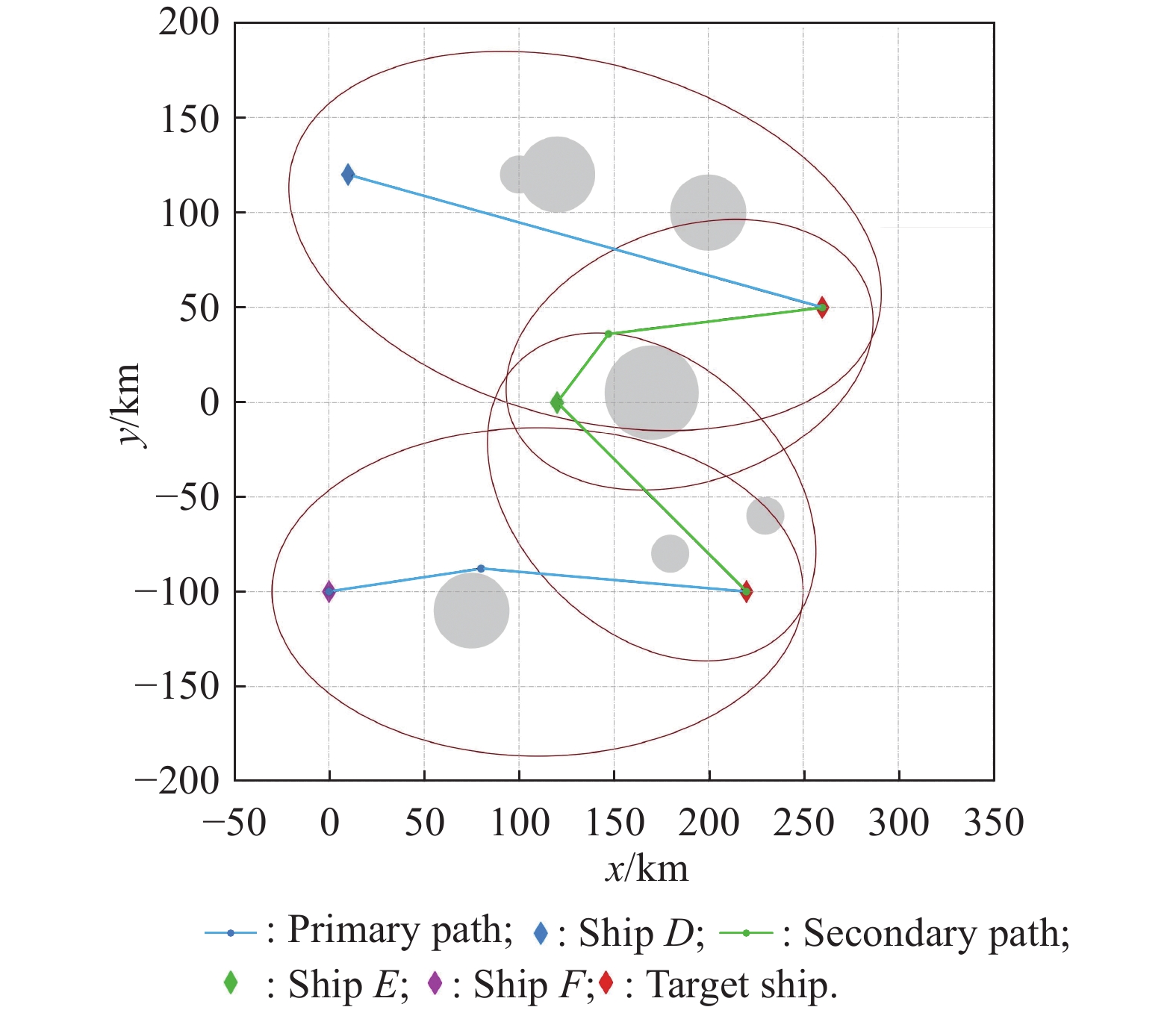
Fig 11
Simulation trajectory of collaborative path planning in three-to-three scenario"
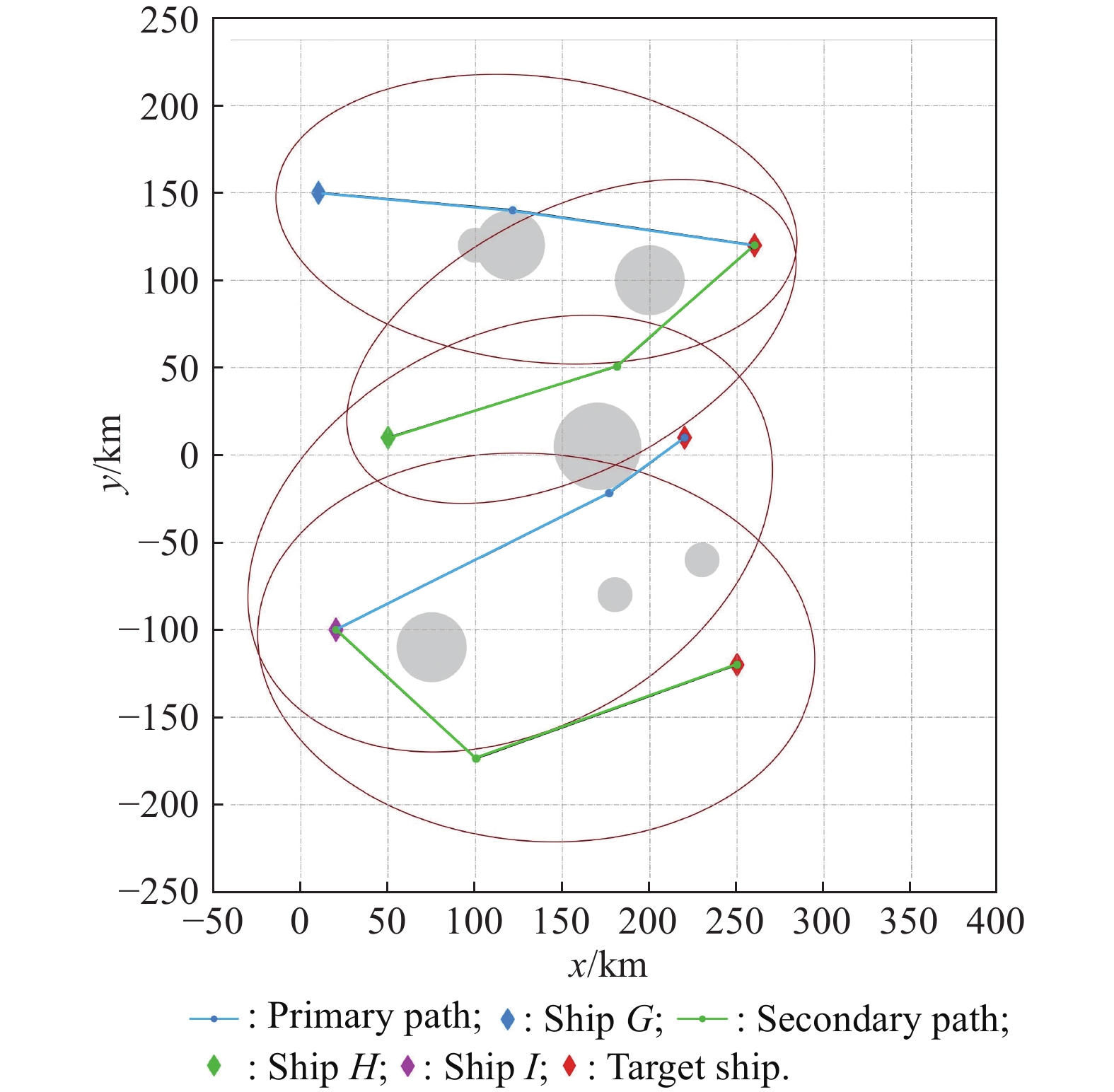
Fig 12
Simulation trajectory of collaborative path planning in four-to-two scenario"
| 1 | LIU S Y, LI S, LIU Y J, et al. Research on anti-ship missile cooperative trajectory planning based on gauss pseudospectral method. Proc. of the 5th Chinese Conference on Swarm Intelligence and Cooperative Control, 2022: 1163−1176. |
| 2 | LIU S Y, RUAN W H, QIU L K, et al. On-line distribution of coordinated attack targets for multi-anti-ship missiles based on genetic simulated annealing algorithm. Proc. of the Chinese Control and Decision Conference, 2019: 1228−1233. |
| 3 | LIU G, AN Z B, LAO S Y, et al Firepower distribution method of anti-ship missile based on coupled path planning. Journal of Systems Engineering and Electronics, 2022, 33 (4): 1010- 1024. |
| 4 | ZHANG H, XIN B, DOU L H, et al A review of cooperative path planning of an unmanned aerial vehicle group. Frontiers of Information Technology & Electronic Engineering, 2020, 21 (12): 1671- 1694. |
| 5 | LIU G, LAO S Y, TANG J, et al Progress on intelligent collaborative path planning for anti-ship missile. Journal of Command and Control, 2021, 7 (4): 342- 349. |
| 6 | LIU G, LAO S Y, TAN D F, et al Research status and progress on anti-ship missile path planning. Acta Automatica Sinica, 2013, 39 (4): 347- 359. |
| 7 |
PHARPATARA P, HERISSE B, PEPY R, et al Sampling-based path planning: a new tool for missile guidance. IFAC Proceedings Volumes, 2013, 46 (19): 131- 136.
doi: 10.3182/20130902-5-DE-2040.00091 |
| 8 | KIM M J, KANG T Y, RYOO C K Real-time path planning for unmanned aerial vehicles based on compensated voronoi diagram. International Journal of Aeronautical and Space Sciences, 2025, 26 (1): 235- 244. |
| 9 | GUO J, XIA W, HU X X, et al Feedback RRT* algorithm for UAV path planning in a hostile environment. Computers & Industrial Engineering, 2022, 174, 108771. |
| 10 |
HAO G Q, LV Q, HUANG Z, et al UAV path planning based on improved artificial potential field method. Aerospace, 2023, 10 (6): 562.
doi: 10.3390/aerospace10060562 |
| 11 |
RAO J J, XIANG C Y, XI J Y, et al Path planning for dual UAVs cooperative suspension transport based on artificial potential field-A* algorithm. Knowledge-Based Systems, 2023, 277, 110797.
doi: 10.1016/j.knosys.2023.110797 |
| 12 |
YUAN M S, ZHOU T L, CHEN M Improved lazy theta* algorithm based on octree map for path planning of UAV. Defence Technology, 2023, 23, 8- 18.
doi: 10.1016/j.dt.2022.01.006 |
| 13 |
CUI J G, WU L, HUANG X D, et al Multi-strategy adaptable ant colony optimization algorithm and its application in robot path planning. Knowledge-Based Systems, 2024, 288, 111459.
doi: 10.1016/j.knosys.2024.111459 |
| 14 |
LUO J, LIANG Q C, LI H UAV penetration mission path planning based on improved holonic particle swarm optimization. Journal of Systems Engineering and Electronics, 2023, 34 (1): 197- 213.
doi: 10.23919/JSEE.2022.000132 |
| 15 | LU F X, DAI Q Y, XU J F, et al Improved APF missile route planning based on circulation repulsion potential field. Journal of Aerospace Power, 2023, 38 (9): 2288- 2298. |
| 16 |
ZHANG J D, GUO Y K, ZHENG L H, et al Real-time UAV path planning based on LSTM network. Journal of Systems Engineering and Electronics, 2024, 35 (2): 374- 385.
doi: 10.23919/JSEE.2023.000157 |
| 17 | WEN N F, ZHAO L L, SU X H, et al UAV online path planning algorithm in a low altitude dangerous environment. IEEE/CAA Journal of Autom, 2015, 2 (2): 173- 185. |
| 18 | WU J F, WANG H L, WANG Y X, et al UAV reactive interfered fluid path planning. Acta Automatica Sinica, 2023, 49 (2): 272- 287. |
| 19 | WANG Q J, SHENG P, PENG J Geometric principle based route planning of anti-ship missile in coordinated attacking. Electronics Optics and Control, 2019, 26 (9): 19- 25. |
| 20 | WANG Y J, LU M H, GONG C Research on anti-ship missile by submarine salvo route planning algorithms. Tactical Missile Technology, 2017, 6, 44- 49. |
| 21 | BABEL L Coordinated target assignment and UAV path planning with timing constraints. Journal of Intelligent Robotic Systems, 2019, 94 (3): 857- 869. |
| 22 | ZHANG C G, DING Y, SHEN X P Cooperative path planning for anti-ship missiles on multi-platform based on quantum bidirectional RRT algorithm. Fire Control & Command Control, 2017, 42 (4): 36- 41. |
| 23 | ZHANG J, DU X, DONG Q C, et al Distributed collaborative complete coverage path planning based on hybrid strategy. Journal of Systems Engineering and Electronics, 2023, 35 (2): 463- 472. |
| 24 |
ALI Z A, HAN Z G, WANG B H Cooperative path planning of multiple UAVs by using max-min ant colony optimization along with cauchy mutant operator. Fluctuation Noise Letters, 2021, 20 (1): 2150002.
doi: 10.1142/S0219477521500024 |
| 25 |
HUANG L W, QU H, JI P, et al A novel coordinated path planning method using k-degree smoothing for multi-UAVs. Applied Soft Computing, 2016, 48, 182- 192.
doi: 10.1016/j.asoc.2016.06.046 |
| 26 |
NIU Y B, YAN X F, WANG Y Z, et al Three-dimensional collaborative path planning for multiple UCAVs based on improved artificial ecosystem optimizer and reinforcement learning. Knowledge-Based Systems, 2023, 276, 110782.
doi: 10.1016/j.knosys.2023.110782 |
| 27 |
JAIN G, YADAV G, PRAKASH D, et al MVO-based path planning scheme with coordination of UAVs in 3-D environment. Journal of Computational Science, 2019, 37, 101016.
doi: 10.1016/j.jocs.2019.07.003 |
| 28 | SHI Y, ZHANG L H, DONG S Q, et al Path planning algorithm for antiship missile based on regional division. Systems Engineering and Electronics, 2019, 41 (3): 571- 578. |
| 29 | HUANG C, MA H J, ZHOU X B, et al. Cooperative path planning of multiple unmanned aerial vehicles using cylinder vector particle swarm optimization with gene targeting. IEEE Sensors Journal, 2025, 25(5): 8470−8480. |
| 30 |
CAO Y, WEI W Y, BAI Y, et al Multi-base multi-UAV cooperative reconnaissance path planning with genetic algorithm. Cluster Computing, 2019, 22, 5175- 5184.
doi: 10.1007/s10586-017-1132-9 |
| 31 | LIU G, LAO S Y, TAN D F Converse path planning for anti-ship missiles based on operational area. Systems Engineering and Electronics, 2011, 33 (4): 799- 805. |
| 32 | SHI Y, ZHANG L H, DONG S Q. Path planning of anti-ship missile based on voronoi diagram and binary tree algorithm, 2019, 69(4):369−377. |
| 33 | CHENG L, LU H, LEI T, et al. Path planning for anti-ship missile using tangent based dubins path. Proc. of the 2nd International Conference on Intelligent Autonomous Systems, 2019: 175−180. |
| 34 | HAN Z L, CHEN M, ZHU H J, et al Ground threat prediction-based path planning of unmanned autonomous helicopter using hybrid enhanced artificial bee colony algorithm. Defence Technology, 2024, 32, 1- 22. |
| 35 | TANG G, TANG C, CLARAMUNT C, et al Geometric A-star algorithm: An improved A-star algorithm for AGV path planning in a port environment. IEEE Access, 2021, 9, 59196- 59210. |
| 36 | LIU Y, ZHANG X J, ZHANG Y, et al Collision free 4D path planning for multiple UAVs based on spatial refined voting mechanism and PSO approach. Chinese Journal of Aeronautics, 2019, 32 (6): 1504- 1519. |
| 37 | ASLAN S, ERKIN T A multi-population immune plasma algorithm for path planning of unmanned combat aerial vehicle. Advanced Engineering Informatics, 2023, 55, 101829. |
| 38 | LIU G, LAO S Y, HOU L L, et al OARPER-MAFO algorithm for anti-ship missile path planning. Aerospace Science and Technology, 2015, 47, 135- 145. |
| 39 | SHEN J F, LIU X M, WU L H, et al Cooperative route planning of anti-ship missiles from multiple platforms. Tactical Missile Technology, 2009, 30 (2): 62- 66. |
| 40 |
LIU G, LAO S Y, YUAN C, et al OACRR-PSO Algorithm for anti-ship missile path planning. Acta Automatica Sinica, 2012, 38 (9): 1528- 1537.
doi: 10.3724/SP.J.1004.2012.01528 |
| 41 | WU X L, WU S T, XING Z H. A guidance law with impact angle constraint for anti-ship missiles cooperative attack. Proc. of the 33rd Chinese Control Conference, 2014: 954−959. |
| 42 |
TAVOOSI V, MARZBANRAD J, GOLNAVAZ M Optimized path planning of an unmanned vehicle in an unknown environment using the PSO algorithm. Proc. of the IOP Conference Series: Materials Science and Engineering, 2020, 671, 012009.
doi: 10.1088/1757-899X/671/1/012009 |
| 43 |
SONG B Y, WANG Z D, ZOU L An improved PSO algorithm for smooth path planning of mobile robots using continuous high-degree Bezier curve. Applied soft computing, 2021, 100, 106960.
doi: 10.1016/j.asoc.2020.106960 |
| 44 | MASEHIAN E, SEDIGHIZADEH D. A multi-objective PSO-based algorithm for robot path planning. Proc. of the IEEE International Conference on Industrial Technology, 2010: 465−470. |
| [1] | Jiandong ZHANG, Yukun GUO, Lihui ZHENG, Qiming YANG, Guoqing SHI, Yong WU. Real-time UAV path planning based on LSTM network [J]. Journal of Systems Engineering and Electronics, 2024, 35(2): 374-385. |
| [2] | Jia ZHANG, Xin DU, Qichen DONG, Bin XIN. Distributed collaborative complete coverage path planning based on hybrid strategy [J]. Journal of Systems Engineering and Electronics, 2024, 35(2): 463-472. |
| [3] | Yunxiu ZENG, Kai XU. Recognition and interfere deceptive behavior based on inverse reinforcement learning and game theory [J]. Journal of Systems Engineering and Electronics, 2023, 34(2): 270-288. |
| [4] | Jing LUO, Qianchao LIANG, Hao LI. UAV penetration mission path planning based on improved holonic particle swarm optimization [J]. Journal of Systems Engineering and Electronics, 2023, 34(1): 197-213. |
| [5] | Lanyong ZHANG, Ruixuan ZHANG. Research on UAV cloud control system based on ant colony algorithm [J]. Journal of Systems Engineering and Electronics, 2022, 33(4): 805-811. |
| [6] | Gang LIU, Zhibiao AN, Songyang LAO, Wu LI. Firepower distribution method of anti-ship missile based on coupled path planning [J]. Journal of Systems Engineering and Electronics, 2022, 33(4): 1010-1024. |
| [7] | Alireza MOHSENI, Vincent DUCHAINE, Tony WONG. Experimental study of path planning problem using EMCOA for a holonomic mobile robot [J]. Journal of Systems Engineering and Electronics, 2021, 32(6): 1450-1462. |
| [8] | Zhen XU, Enze ZHANG, Qingwei CHEN. Rotary unmanned aerial vehicles path planning in rough terrain based on multi-objective particle swarm optimization [J]. Journal of Systems Engineering and Electronics, 2020, 31(1): 130-141. |
| [9] | Qiming YANG, Jiandong ZHANG, Guoqing SHI. Modeling of UAV path planning based on IMM under POMDP framework [J]. Journal of Systems Engineering and Electronics, 2019, 30(3): 545-554. |
| [10] | Zhenxing ZHANG, Rennong YANG, Huanyu LI, Yuhuan FANG, Zhenyu HUANG, Ying ZHANG. Antlion optimizer algorithm based on chaos search and its application [J]. Journal of Systems Engineering and Electronics, 2019, 30(2): 352-365. |
| [11] | Xiaoxuan Hu, Yanhong Liu, and Guoqiang Wang. Optimal search for moving targets with sensing capabilities using multiple UAVs [J]. Systems Engineering and Electronics, 2017, 28(3): 526-535. |
| [12] | Yani Cui, Jia Ren, Wencai Du, and Jingguo Dai. UAV target tracking algorithm based on task allocation consensus [J]. Journal of Systems Engineering and Electronics, 2016, 27(6): 1207-1218. |
| [13] | Mingyong Liu, Baogui Xu, and Xingguang Peng. Cooperative path planning for multi-AUV in time-varying ocean flows [J]. Systems Engineering and Electronics, 2016, 27(3): 612-618. |
| [14] | Xiang Gao, Yangwang Fang, and Youli Wu. Fuzzy Q learning algorithm for dual-aircraft path planning to cooperatively detect targets by passive radars [J]. Journal of Systems Engineering and Electronics, 2013, 24(5): 800-810. |
| [15] | Yuxing Mao, Ching Y. Suen, and Wei He. Extraction of affine invariant features for shape recognition based on ant colony optimization [J]. Journal of Systems Engineering and Electronics, 2011, 22(6): 1003-1009. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||