
Journal of Systems Engineering and Electronics ›› 2024, Vol. 35 ›› Issue (2): 374-385.doi: 10.23919/JSEE.2023.000157
• SYSTEMS ENGINEERING • Previous Articles
Jiandong ZHANG1( ), Yukun GUO1,2(), Lihui ZHENG1,3(), Qiming YANG1,*(), Guoqing SHI1(), Yong WU1()
), Yukun GUO1,2(), Lihui ZHENG1,3(), Qiming YANG1,*(), Guoqing SHI1(), Yong WU1()
Received:2022-09-15
Online:2024-04-18
Published:2024-04-18
Contact:
Qiming YANG
E-mail:jdzhang@nwpu.edu.cn;2020202124@mail.nwpu.edu.cn;lihuizheng@mail.nwpu.edu.cn;yangqm@nwpu.edu.cn;shiguoqing@nwpu.edu.cn;yongwu@nwpu.edu.cn
About author:Supported by:Jiandong ZHANG, Yukun GUO, Lihui ZHENG, Qiming YANG, Guoqing SHI, Yong WU. Real-time UAV path planning based on LSTM network[J]. Journal of Systems Engineering and Electronics, 2024, 35(2): 374-385.
Add to citation manager EndNote|Reference Manager|ProCite|BibTeX|RefWorks
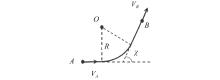
Fig 1
Aircraft turning angle diagram"
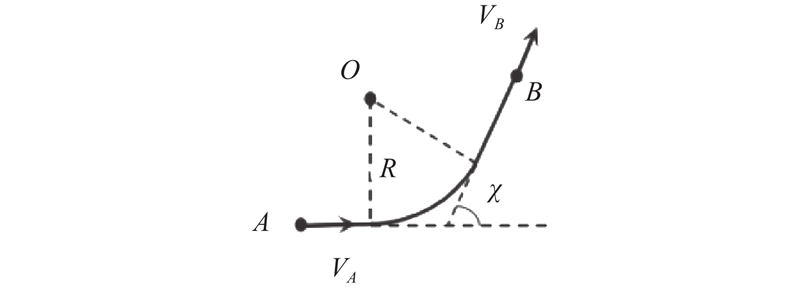

Fig 2
UAV decision making process"
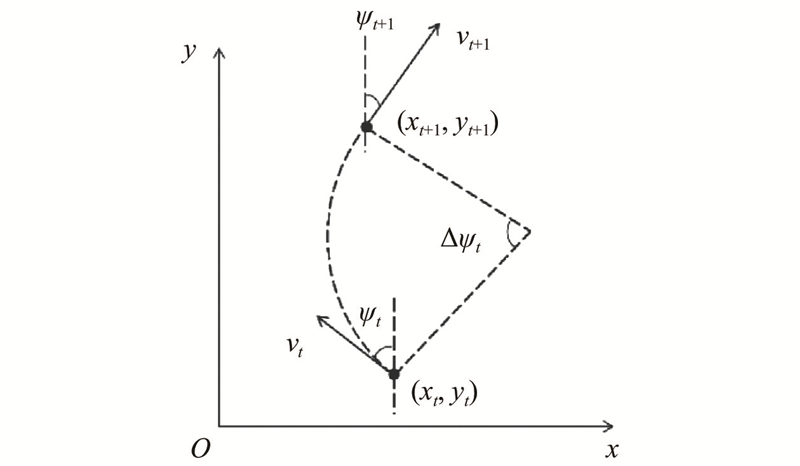
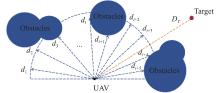
Fig 3
Obstacle distance information schematic"
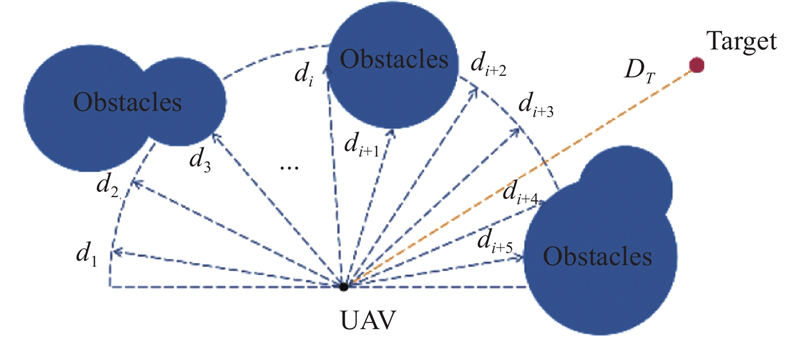
Fig 4
MDP flow chart"
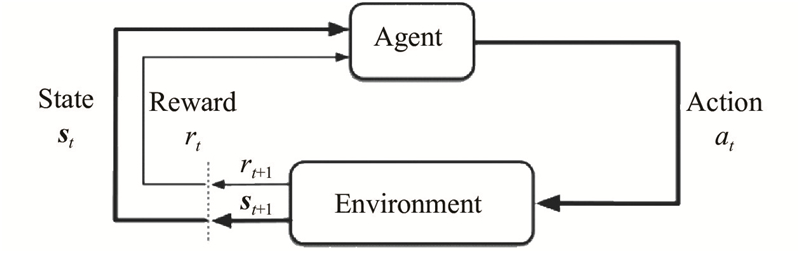
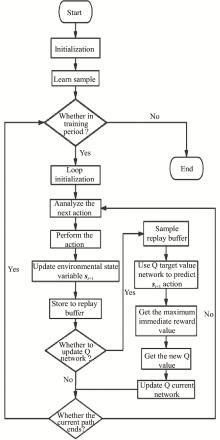
Fig 5
DQN calculation process"
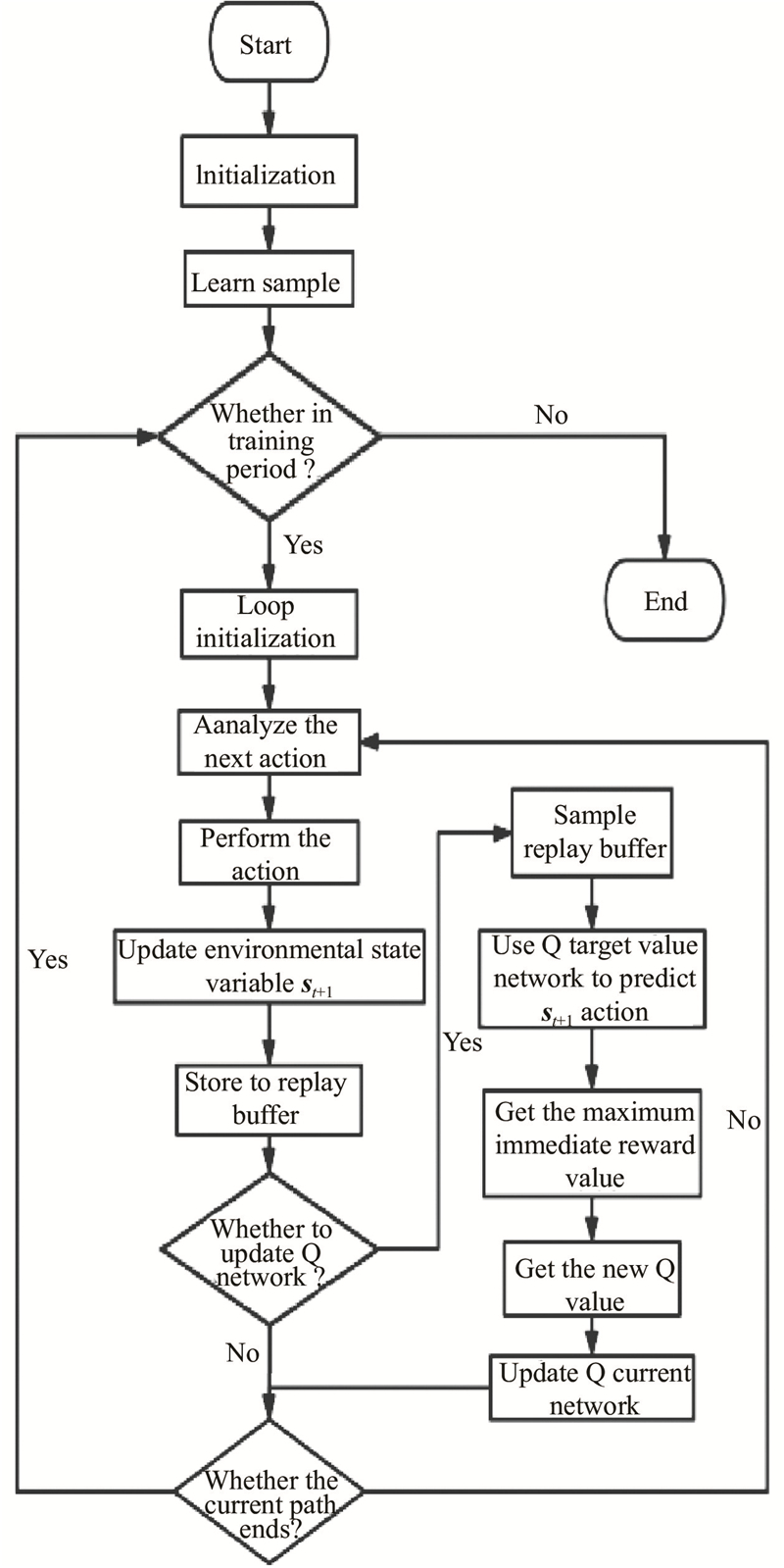
Table 1
Priority of each reward"
| Reward type | Priority |
| Collision reward | 1 |
| Arrival reward | 2 |
| Track angle reward | 3 |
| Distance reward | 4 |
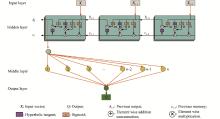
Fig 6
LSTM network structure"
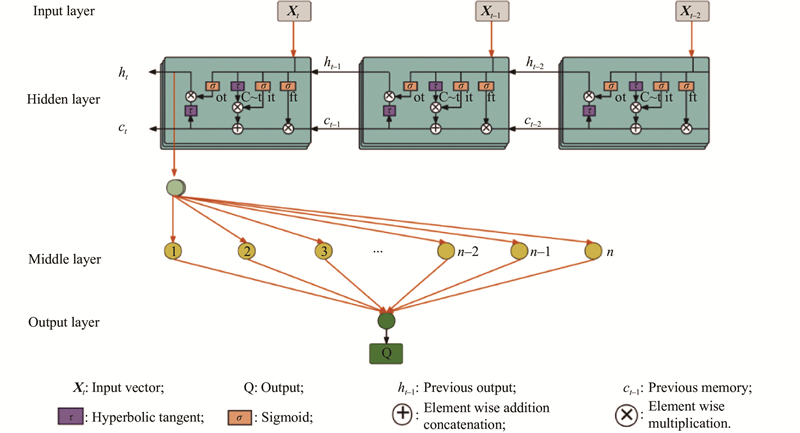
Fig 7
Q-value network"
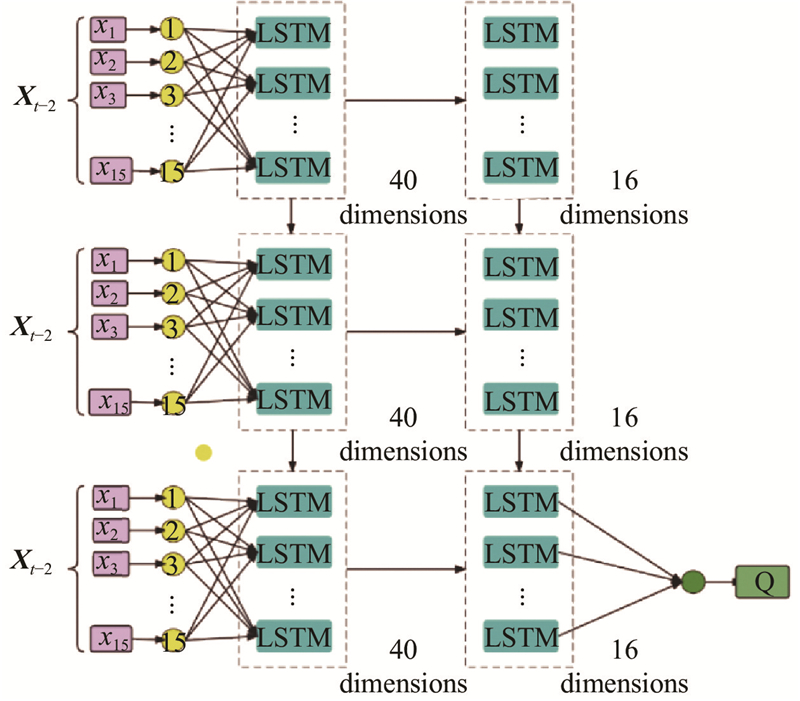
Table 2
DQN parameter"
| Parameter | Priority |
| Collision reward | −10 |
| Arrival reward | 20 |
| Track angle reward | 5 |
| Distance reward | 5 |
| 0.8 | |
| 0.8 | |
| 0.2 |

Fig 8
Original environment path planning"

Table 3
Path data comparison 1"
| Evaluation indicator | FNN | LSTM |
| Path length/km | 24.3 | 24.12 |
| Trajectory yaw angle variance | 738.85 | 188.58 |
| Minimum distance to obstacle/m | 430.7 | 354.4 |
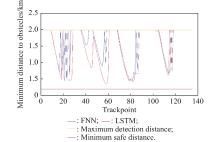
Fig 9
Change in distance between path point and obstacle"
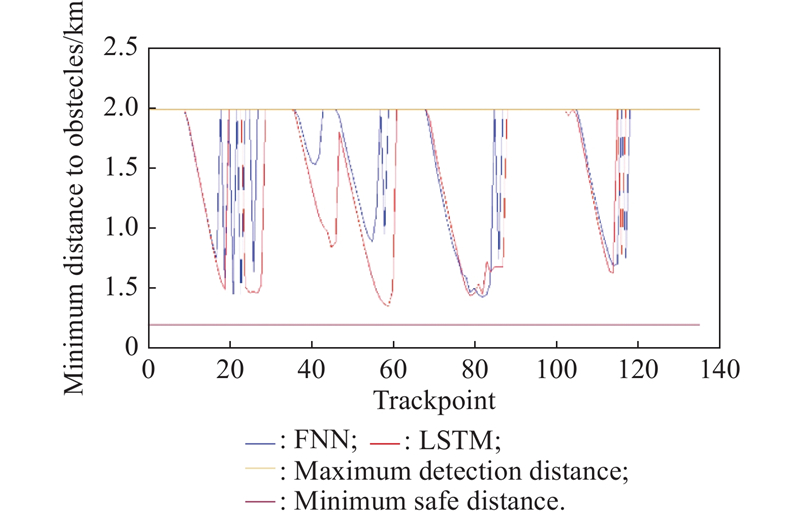

Fig 10
Dynamic path planning"
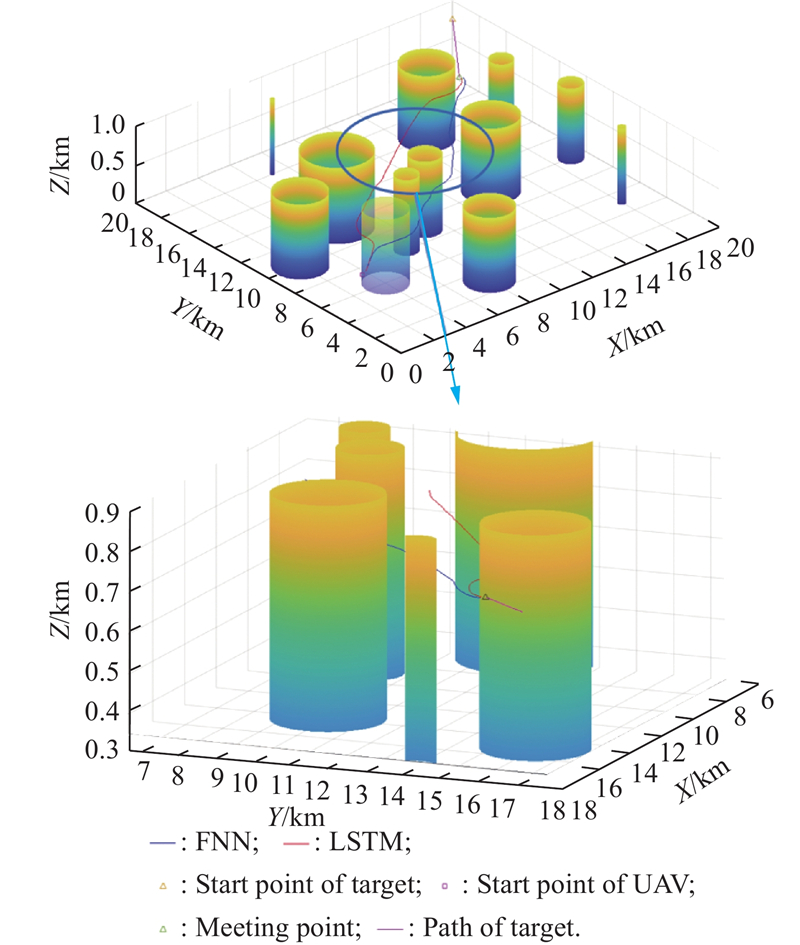
Table 4
Path data comparison 2"
| Evaluation indicator | FNN | LSTM |
| Path length/km | 21.24 | 21.24 |
| Trajectory yaw angle variance | 269.79 | 257.85 |

Fig 11
Path planning in unfamiliar environments"
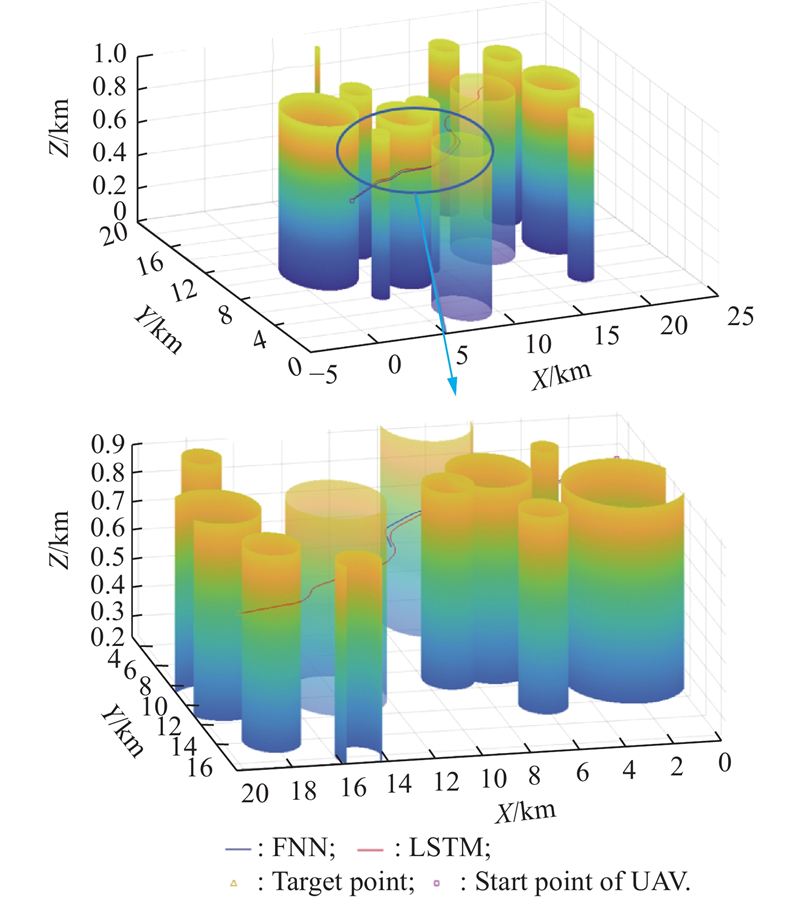
Table 5
Path data comparison 3"
| Evaluation indicator | FNN | LSTM |
| Path length/km | Undone | 25.2 |
| Trajectory yaw angle variance | Undone | 363.1 |
| Minimum distance to obstacle/m | Undone | 344.7 |
Fig 12
Aircraft turning angle diagram"
| 1 |
AZMAT M, KUMMER S Potential applications of unmanned ground and aerial vehicles to mitigate challenges of transport and logistics-related critical success factors in the humanitarian supply chain. Asian Journal of Sustainability and Social Responsibility, 2020, 5 (1): 1- 22.
doi: 10.1186/s41180-019-0030-x |
| 2 | HOSSAIN M S, CHAITANYA K, BHATTACHARYA Y, et al Integration of smart watch and geographic information system (GIS) to identify post-earthquake critical rescue area part. II. Analytical evaluation of the system. Progress in Disaster Science, 2021, 9, 100132. |
| 3 |
KHAN M T R, MUHAMMAD SAAD M, RU Y, et al Aspects of unmanned aerial vehicles path planning: overview and applications. International Journal of Communication Systems, 2021, 34 (10): e4827.
doi: 10.1002/dac.4827 |
| 4 |
YANG C H, TSAI M H, KANG S C, et al UAV path planning method for digital terrain model reconstruction—a debris fan example. Automation in Construction, 2018, 93, 214- 230.
doi: 10.1016/j.autcon.2018.05.024 |
| 5 | WANG G Q, ZHENG X Y, ZHAO H T, et al. Unmanned aerial vehicles path planning based on deep reinforcement learning. Proc. of the International Conference on Natural Computation, Fuzzy Systems and Knowledge Discovery, 2019: 81−88. |
| 6 | ZHENG Z, LIU Y, ZHANG X Y. The more obstacle information sharing, the more effective real-time path planning? Knowledge-Based Systems, 2016, 114: 36−46. |
| 7 | STENTZ A. The focused d* algorithm for real-time replanning. Proc. of the International Joint Conference on Artificial Intelligence, 1995: 1652−1659. |
| 8 | CHEN G, LIU D, WANG Y F, et al Path planning method with obstacle avoidance for manipulators in dynamic environment. International Journal of Advanced Robotic Systems, 2018, 15 (6): 1729881418820223. |
| 9 |
ZHANG Z, WU J, DAI J Y, et al A novel real-time penetration path planning algorithm for stealth UAV in 3D complex dynamic environment. IEEE Access, 2020, 8, 122757- 122771.
doi: 10.1109/ACCESS.2020.3007496 |
| 10 | HUANG H, HUANG P, ZHONG S, et al. Dynamic path planning based on improved D algorithms of Gaode map. Proc. of the IEEE 3rd Information Technology, Networking, Electronic and Automation Control Conference, 2019: 15−17. |
| 11 | LIKHACHEV M, KOENIG S. A generalized framework for lifelong planning A* search. Proc. of the International Conference on Automated Planning and Scheduling, 2005: 5–10. |
| 12 |
OGATA K A generic approach on how to formally specify and model check path finding algorithms: Dijkstra, A* and LPA. International Journal of Software Engineering and Knowledge Engineering, 2020, 30 (10): 1481- 1523.
doi: 10.1142/S0218194020400215 |
| 13 | LIM J, OREN S, PANAGIOTIS T. Class-ordered LPA*: an incremental-search algorithm for weighted colored graphs. Proc. of the IEEE/RSJ International Conference on Intelligent Robots and Systems, 2021: 6907−6913. |
| 14 | SVEN K, LIKHACHEV M D* lite. Proc. of the 18th National Conference on Artificial Intelligence, 2002, 476- 483. |
| 15 |
XIE K L, QIANG J, YANG H T Research and optimization of d-start lite algorithm in track planning. IEEE Access, 2020, 8, 161920- 161928.
doi: 10.1109/ACCESS.2020.3021073 |
| 16 |
ZHU X H, YAN B, YUE Y Path planning and collision avoidance in unknown environments for USVs based on an improved D* Lite. Applied Sciences, 2021, 11 (17): 7863.
doi: 10.3390/app11177863 |
| 17 | LI J K, LIU Y. Deep reinforcement learning based adaptive real-time path planning for UAV. Proc. of the 8th International Conference on Dependable Systems and Their Applications, 2021: 522−530. |
| 18 |
HU Z J, GAO X G, WAN K F, et al Relevant experience learning: a deep reinforcement learning method for UAV autonomous motion planning in complex unknown environments. Chinese Journal of Aeronautics, 2021, 34 (12): 187- 204.
doi: 10.1016/j.cja.2020.12.027 |
| 19 |
CANDELI A, DE TOMMASI G, LUI D G, et al A deep deterministic policy gradient learning approach to missile autopilot design. IEEE Access, 2022, 10, 19685- 19696.
doi: 10.1109/ACCESS.2022.3150926 |
| 20 |
XIANG X C, FOO S Recent advances in deep reinforcement learning applications for solving partially observable markov decision processes (POMDP) problems: Part 1—fundamentals and applications in games, robotics and natural language processing. Machine Learning and Knowledge Extraction, 2021, 3 (3): 554- 581.
doi: 10.3390/make3030029 |
| 21 |
YANG S M, YOO S Y, JEONG O R DeNERT-KG: named entity and relation extraction model using DQN, knowledge graph, and BERT. Applied Sciences, 2020, 10 (18): 6429.
doi: 10.3390/app10186429 |
| 22 |
LE N, RATHOUR V S, YAMAZAKI K, et al Deep reinforcement learning in computer vision: a comprehensive survey. Artificial Intelligence Review, 2022, 55, 2733- 2819.
doi: 10.1007/s10462-021-10061-9 |
| 23 | RAHMAN S, SARKER S, HAQUE A K M, et al. Deep reinforcement learning: a new frontier in computer vision research. AHAD M A R, INOUE A, ed. Vision, sensing and analytics: integrative approaches. Cham: Springer International Publishing, 2021. |
| 24 |
AZAR A T, KOUBAA A, ALI MOHAMED N, et al Drone deep reinforcement learning: a review. Electronics, 2021, 10 (9): 999.
doi: 10.3390/electronics10090999 |
| 25 | TAI L, PAOLO G, LIU M. Virtual-to-real deep reinforcement learning: continuous control of mobile robots for mapless navigation. Proc. of the IEEE/RSJ International Conference on Intelligent Robots and Systems, 2017: 24−28. |
| 26 | VENTURINI F, MASON F, PASE F, et al. Distributed reinforcement learning for flexible UAV swarm control with transfer learning capabilities. Proc. of the 6th ACM Workshop on Micro Aerial Vehicle Networks, Systems, and Applications, 2020: 1−6. |
| 27 |
VENTURINI F, MASON F, PASE F, et al Distributed reinforcement learning for flexible and efficient uav swarm control. IEEE Trans. on Cognitive Communications and Networking, 2021, 7 (3): 955- 969.
doi: 10.1109/TCCN.2021.3063170 |
| 28 | YAN C, XIANG X J, WANG C Towards real-time path planning through deep reinforcement learning for a UAV in dynamic environments. Journal of Intelligent & Robotic Systems, 2020, 98 (2): 297- 309. |
| 29 | CHEN X, AI Y D. Multi-UAV path planning based on improved neural network. Proc. of the Chinese Control and Decision Conference, 2018: 9−11. |
| 30 | GUO N, LI C H, GAO T T, et al A fusion method of local path planning for mobile robots based on LSTM neural network and reinforcement learning. Mathematical Problems in Engineering, 2021, 2021 (10): 5524232. |
| 31 |
GUO N, LI C H, WANG D, et al Local path planning of mobile robot based on long short-term memory neural network. Automatic Control and Computer Sciences, 2021, 55 (1): 53- 65.
doi: 10.3103/S014641162101003X |
| [1] | Dada ZHAO, Kai DING, Xiaogang QI, Yu CHEN, Hailin FENG. Sound event localization and detection based on deep learning [J]. Journal of Systems Engineering and Electronics, 2024, 35(2): 294-301. |
| [2] | Boyu QIN, Dong ZHANG, Shuo TANG, Yang XU. Two-layer formation-containment fault-tolerant control of fixed-wing UAV swarm for dynamic target tracking [J]. Journal of Systems Engineering and Electronics, 2023, 34(6): 1375-1396. |
| [3] | Jianhong WANG, RAMIREZ-MENDOZA Ricardo A., Yang XU. Nonlinear direct data-driven control for UAV formation flight system [J]. Journal of Systems Engineering and Electronics, 2023, 34(6): 1409-1418. |
| [4] | Qiang GUO, Long TENG, Xinliang WU, Liangang QI, Wenming SONG. Deinterleaving of radar pulse based on implicit feature [J]. Journal of Systems Engineering and Electronics, 2023, 34(6): 1537-1549. |
| [5] | Zhiwen XIAO, Xiaowei FU. A cooperative detection game: UAV swarm vs. one fast intruder [J]. Journal of Systems Engineering and Electronics, 2023, 34(6): 1565-1575. |
| [6] | Chaopeng YU, Wei XIONG, Xiaoqing LI, Lei DONG. Deep convolutional neural network for meteorology target detection in airborne weather radar images [J]. Journal of Systems Engineering and Electronics, 2023, 34(5): 1147-1157. |
| [7] | Hao DU, Wei WANG, Xuerao WANG, Jingqiu ZUO, Yuanda WANG. Scene image recognition with knowledge transfer for drone navigation [J]. Journal of Systems Engineering and Electronics, 2023, 34(5): 1309-1318. |
| [8] | Jiawei XIA, Xufang ZHU, Zhong LIU, Qingtao XIA. LSTM-DPPO based deep reinforcement learning controller for path following optimization of unmanned surface vehicle [J]. Journal of Systems Engineering and Electronics, 2023, 34(5): 1343-1358. |
| [9] | Qihai YAO, Yong WANG, Yixin YANG. Range estimation of few-shot underwater sound source in shallow water based on transfer learning and residual CNN [J]. Journal of Systems Engineering and Electronics, 2023, 34(4): 839-850. |
| [10] | Yi NAN, Guoxing YI, Lei HU, Changhong WANG, Zhenbiao TU. Influencing factor analysis of interception probability and classification-regression neural network based estimation [J]. Journal of Systems Engineering and Electronics, 2023, 34(4): 992-1006. |
| [11] | Yongbin YU, Haowen TANG, Xiao FENG, Xiangxiang WANG, Hang HUANG. Design of multilayer cellular neural network based on memristor crossbar and its application to edge detection [J]. Journal of Systems Engineering and Electronics, 2023, 34(3): 641-649. |
| [12] | Yunxiu ZENG, Kai XU. Recognition and interfere deceptive behavior based on inverse reinforcement learning and game theory [J]. Journal of Systems Engineering and Electronics, 2023, 34(2): 270-288. |
| [13] | Jie LI, Xiaoyu DANG, Sai LI. DQN-based decentralized multi-agent JSAP resource allocation for UAV swarm communication [J]. Journal of Systems Engineering and Electronics, 2023, 34(2): 289-298. |
| [14] | Yaozhong ZHANG, Yike LI, Zhuoran WU, Jialin XU. Deep reinforcement learning for UAV swarm rendezvous behavior [J]. Journal of Systems Engineering and Electronics, 2023, 34(2): 360-373. |
| [15] | Yukun YANG, Xiangdong LIU. Relational graph location network for multi-view image localization [J]. Journal of Systems Engineering and Electronics, 2023, 34(2): 460-468. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||