
Journal of Systems Engineering and Electronics ›› 2023, Vol. 34 ›› Issue (1): 160-171.doi: 10.23919/JSEE.2022.000154
• CONTROL THEORY AND APPLICATION • Previous Articles Next Articles
Jianping ZHOU( ), Wei LI(), Qunli XIA(), Huan JIANG()
), Wei LI(), Qunli XIA(), Huan JIANG()
Received:2021-02-05
Online:2023-02-18
Published:2023-03-03
Contact:
Qunli XIA
E-mail:6043105@qq.com;cooper1994@126.com;1010@bit.edu.cn;h.jiang@bit.edu.cn
About author:Supported by:Jianping ZHOU, Wei LI, Qunli XIA, Huan JIANG. Robust missile autopilot design based on dynamic surface control[J]. Journal of Systems Engineering and Electronics, 2023, 34(1): 160-171.
Add to citation manager EndNote|Reference Manager|ProCite|BibTeX|RefWorks
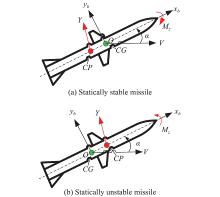
Fig 1
Free-body diagram of a tail-controlled missile"
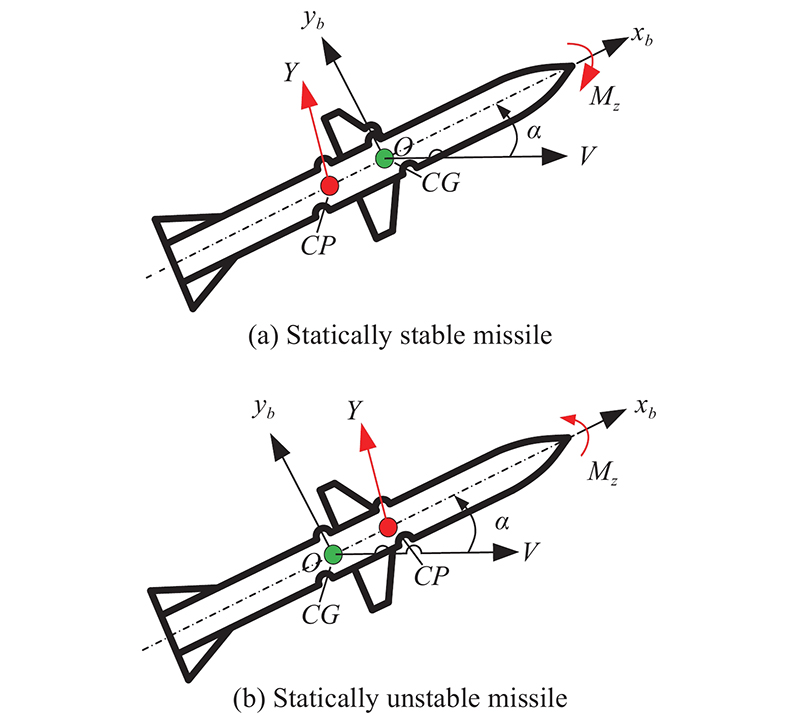
Table 1
Related missile parameters"
| Variable | Value |
| | 204.01 |
| | 0.040877 |
| | 0.2286 |
| | 247.42 |
| | −0.3 |
| | 150 |
| | 0.7 |
| | 0.000103 |
| | 0.000215 |
| | −0.00945 |
| | −0.0195 |
| | −0.1696 |
| | 0.051 |
| | −0.034 |
| | −0.206 |

Fig 2
Autopilot structure based on time-scale separation"


Fig 3
Functional block diagram of the ESO-based controller"
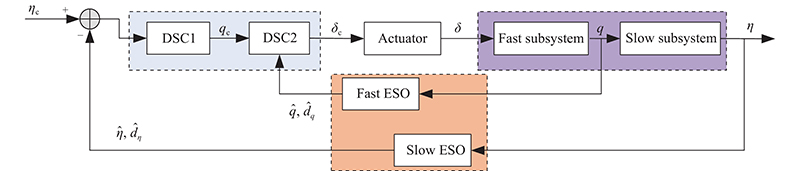
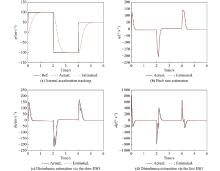
Fig 4
Performance of ESO in the DSC controller for a nominal system"
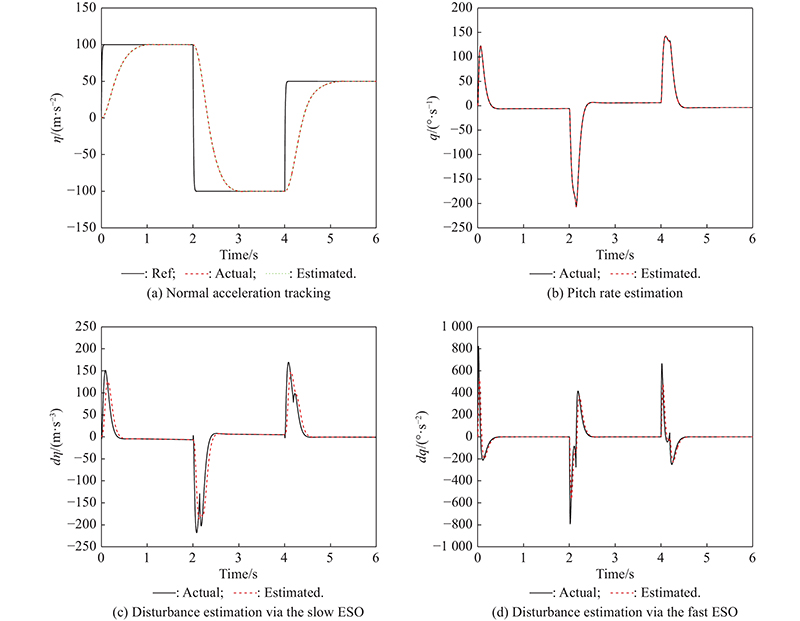
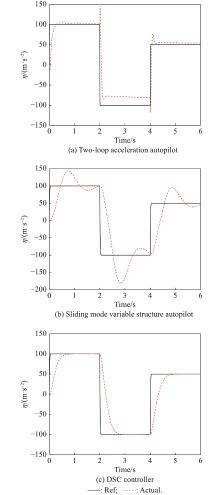
Fig 5
Acceleration tracking of the three controllers for a nominal system"
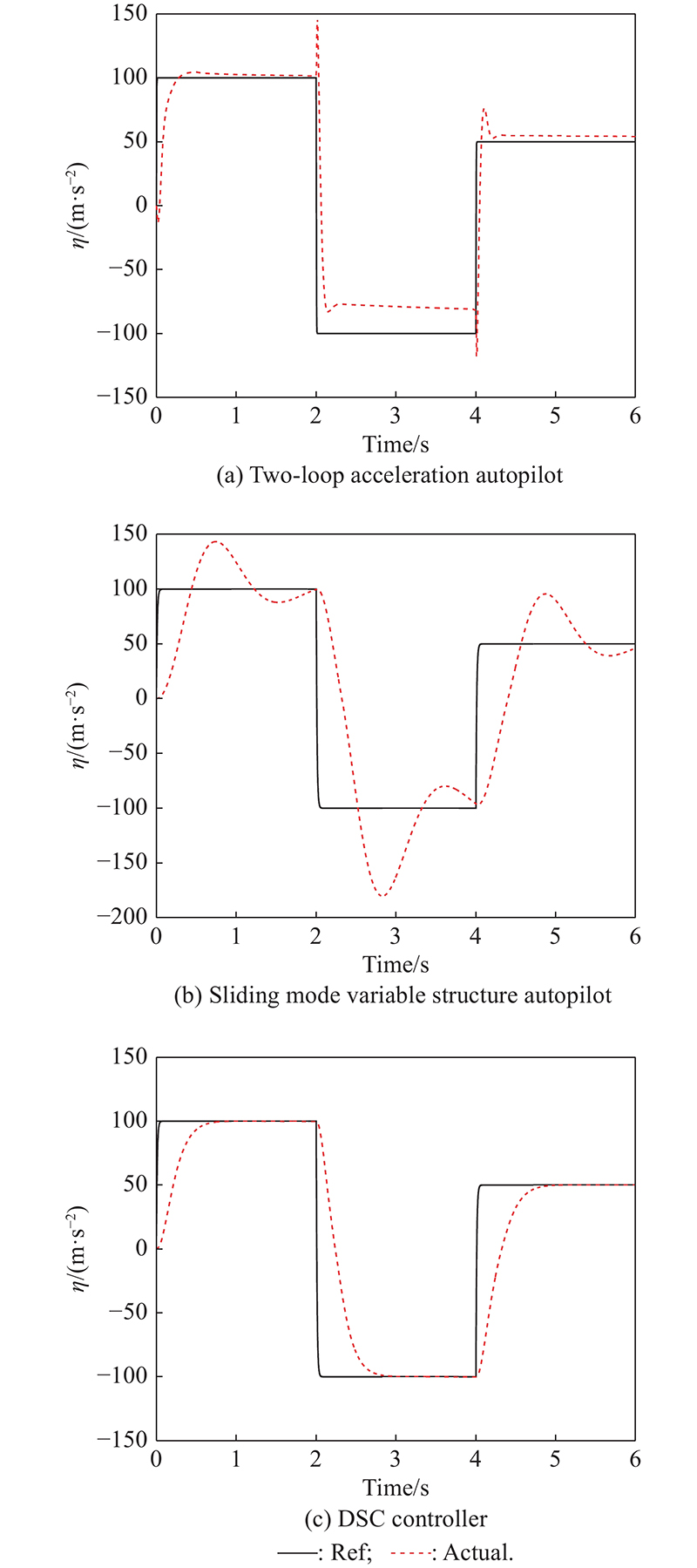
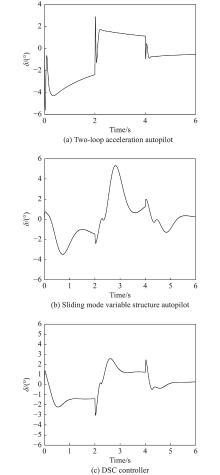
Fig 6
Control input deflection angles of the three controllers for a nominal system"
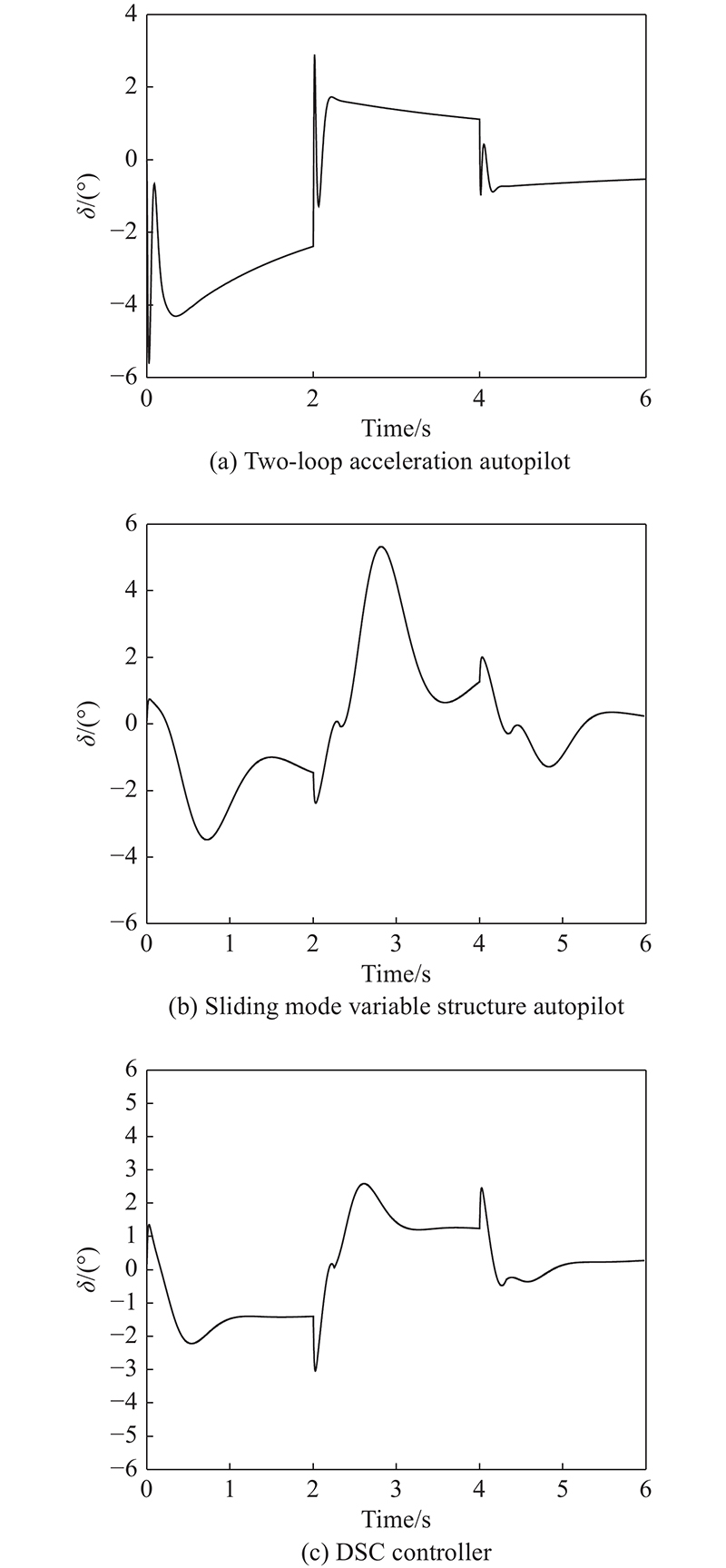
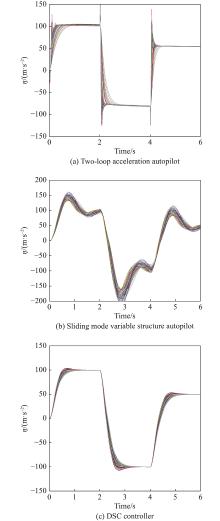
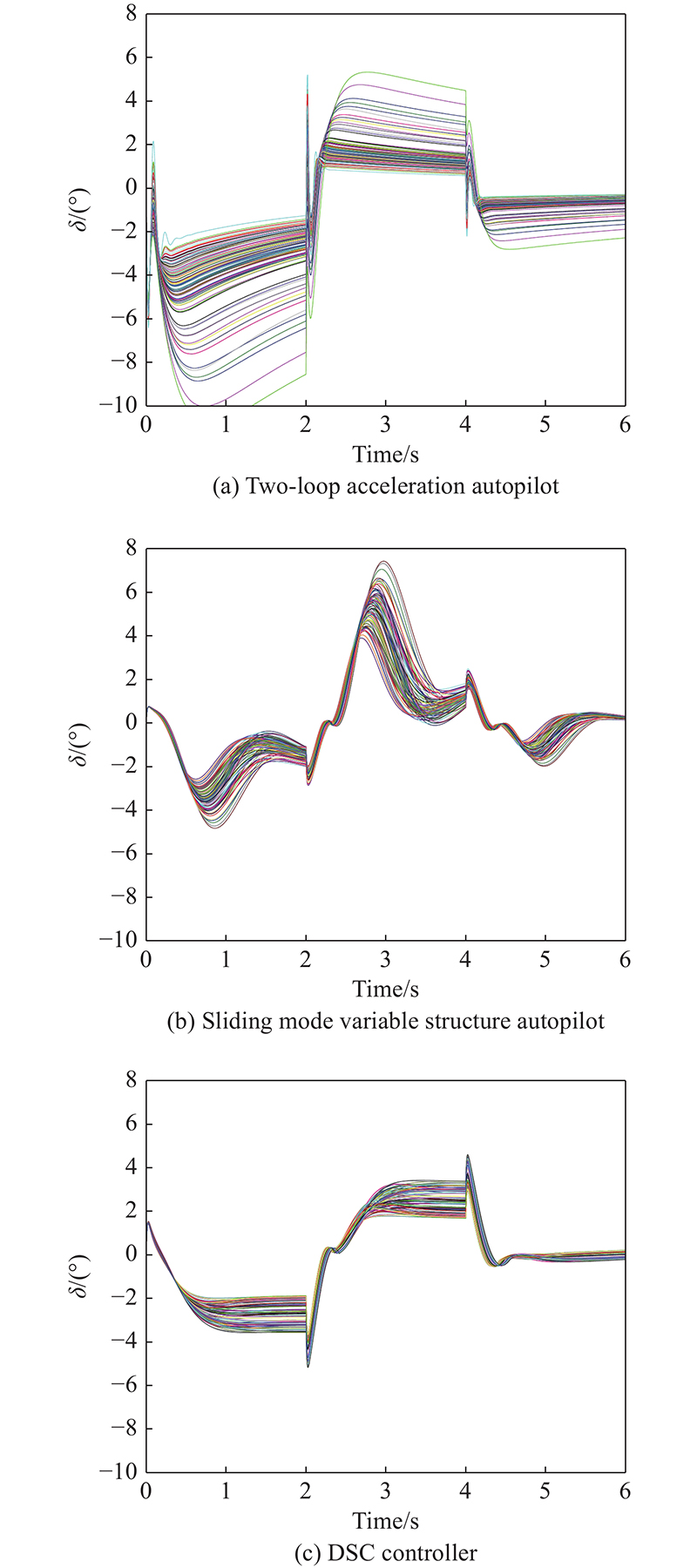
Fig 7
Robustness analysis of the three controllers for control input deflection angles"
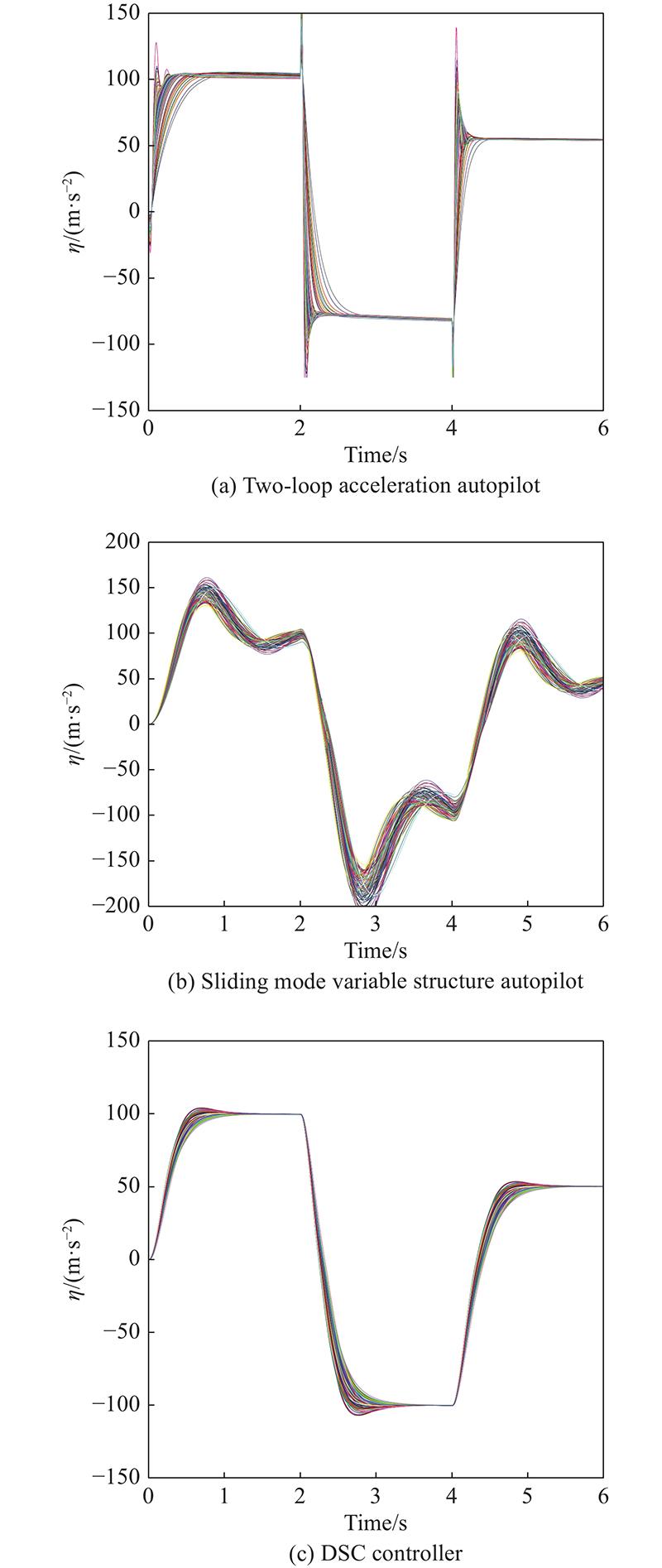
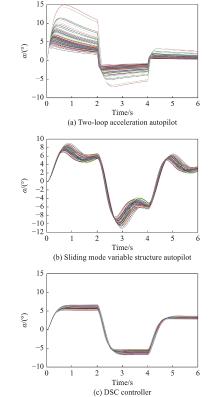
Fig 8
Robustness analysis of the three controllers for control alpha"
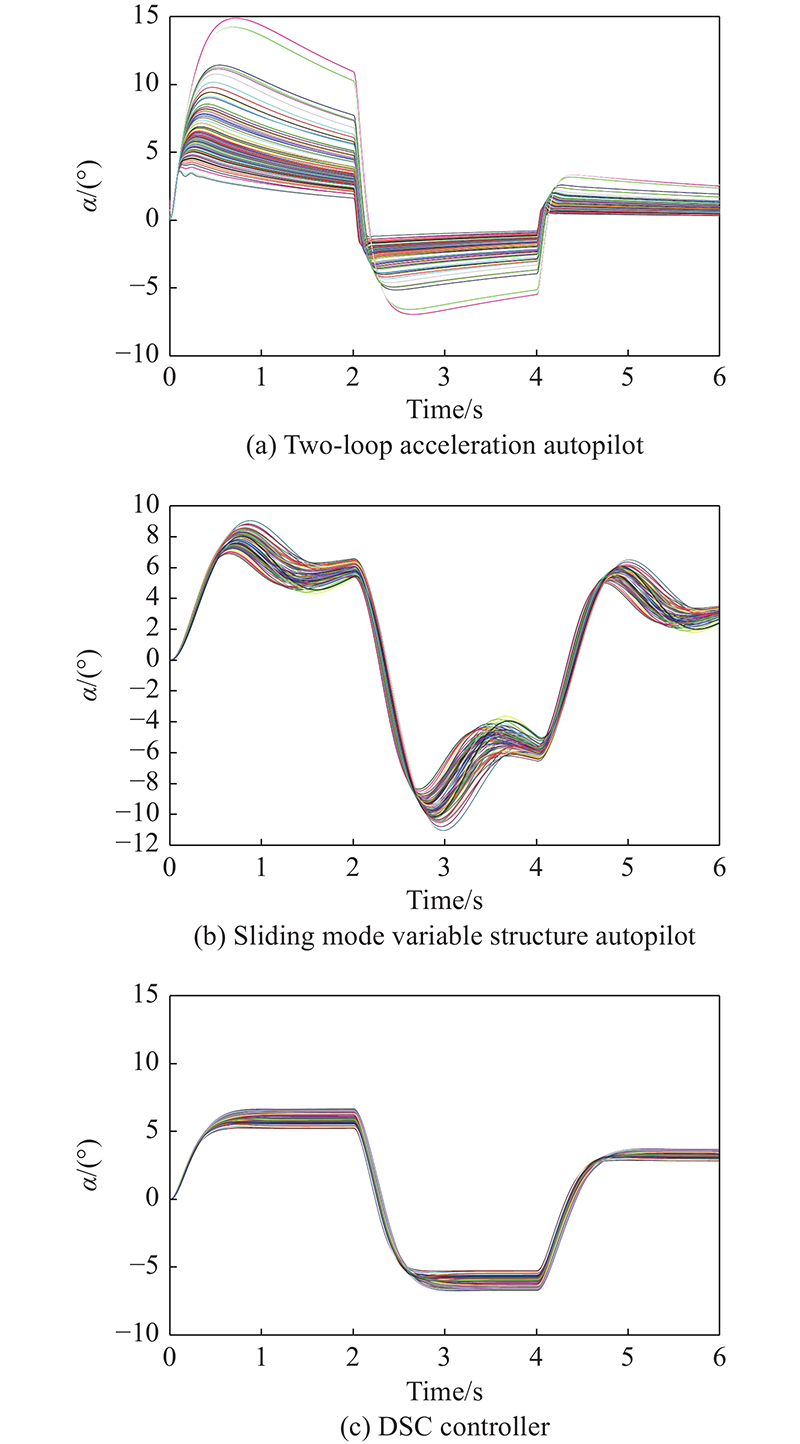
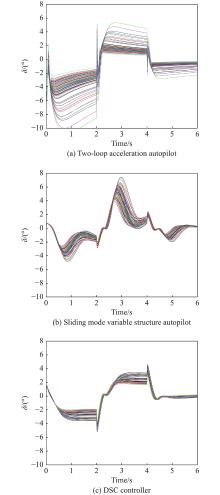
Fig 9
Robustness analysis of the three controllers for control input deflection angles"
| 1 | MIN B M, SANG D, TAHK M J, et al Missile autopilot design via output redefinition and gain optimization technique. Proc. of the SICE Annual Conference, 2007, 2615- 2619. |
| 2 | BRANCH W Autopilot design rules and guidelines, guidance. Proc. of the Navigation, Control Conference and Exhibit, 2006, 1445- 1452. |
| 3 | BUSCHEK H Robust autopilot design for future missile systems. Proc. of the Guidance, Navigation, and Control Conference, 1997, 1672- 1681. |
| 4 | REICHERT R T Dynamic scheduling of modern-robust-control autopilot designs for missiles. IEEE Control Systems Magazine, 1991, 12 (5): 35- 42. |
| 5 |
LI Z X, ZHANG R Time-varying sliding mode control of missile based on suboptimal method. Journal of Systems Engineering and Electronics, 2021, 32 (3): 700- 710.
doi: 10.23919/JSEE.2021.000060 |
| 6 | DAVID S, SAYDY L, AKHRIf O Gain scheduling control design for a pitch-axis missile autopilot. Proc. of the AIAA Guidance, Navigation, Control Conference and Exhibit, 2013, 1- 18. |
| 7 |
LI B, LIN D F, TIAN S, et al Gain-scheduled for aerial vehicle autopilot design using fixed-structure synthesis. Journal of Advanced Computational Intelligence and Intelligent Informatics, 2018, 22 (3): 316- 321.
doi: 10.20965/jaciii.2018.p0316 |
| 8 |
NICHOLS R A, REICHERT R T, RUGH W J, et al Gain scheduling for H-infinity controllers: a flight-control example. IEEE Trans. on Control Systems Technology, 1993, 1 (2): 69- 79.
doi: 10.1109/87.238400 |
| 9 | LAWRENCE D, KELLY J, EVERS J Gain scheduled missile autopilot design using a control signal interpolation technique. Proc. of the Guidance, Navigation, and Control Conference and Exhibit, 2006, 1394- 1402. |
| 10 |
THEODOULIS S, DUC G Missile autopilot design: gain-scheduling and the gap metric. Journal of Guidance, Control, and Dynamics, 2009, 32 (3): 986- 996.
doi: 10.2514/1.34756 |
| 11 | FERNANDO A C, ELDER M H Block dynamic surface control applied to a sea-skimming missile. Journal of Guidance, Control, and Dynamics, 2017, 40 (5): 1283- 1289. |
| 12 |
PANCHAL B, SUBRAMANIAN K, TALOLE S E Robust missile autopilot design using two time-scale separation. IEEE Trans. on Aerospace and Electronic Systems, 2018, 54 (3): 1499- 1510.
doi: 10.1109/TAES.2018.2796654 |
| 13 | DEVAUD E, SIGUERDIDJANE H, FONT S Nonlinear dynamic autopilot design for the non-minimum phase missile. Proc. of the IEEE Conference on Decision & Control, 2002, 4691- 4696. |
| 14 | MUNJE R, GU D Y, XU B, et al Feedback control design for three-time-scale system using two-time-scale approach. Proc. of the 37th Chinese Control Conference, 2018, 4982- 4987. |
| 15 |
GUO R, SHI X P, ZHU Y, et al Super-resolution reconstruction of astronomical images using time-scale adaptive normalized convolution. Chinese Journal of Aeronautics, 2018, 31 (8): 1752- 1763.
doi: 10.1016/j.cja.2018.06.002 |
| 16 | LIU S L, YU W W Two-time-scale stochastic dispatch of PV-microgrid considering demand side management. Proc. of the 36th Chinese Control Conference, 2017, 10604- 10610. |
| 17 | MENON P K, YOUSEFPOR M Design of nonlinear autopilots for high angle of attack missiles. Proc. of the AIAA Guidance, Navigation, and Control Conference, 1996, 3913. |
| 18 |
REINER J, BALAS G J, GARRARD W L Flight control design using robust dynamic inversion and time-scale separation. Automatica, 1996, 32 (11): 1493- 1504.
doi: 10.1016/S0005-1098(96)00101-X |
| 19 | WEI Y Y, HOU M Z, DUAN G R Adaptive multiple sliding surface control for integrated missile guidance and autopilot with terminal angular constraint. Proc. of the IEEE 29th Control Conference, 2010, 1- 16. |
| 20 |
SHIMA T, IDAN M, GOLAN O M Sliding-mode control for integrated missile autopilot guidance. Journal of Guidance, Control, and Dynamics, 2006, 29 (2): 250- 260.
doi: 10.2514/1.14951 |
| 21 | HEDRICK J K, SWAROOP D, YIP P P, et al Dynamic surface control for a class of nonlinear systems. IEEE Trans. on Automatic Control, 2002, 45 (10): 1893- 1899. |
| 22 | CHO D, KIM H J Adaptive dynamic surface control using the Fourier integral for uncertain nonlinear systems. Proc. of the 11th International Conference on Control, Automation and Systems, 2011, 550- 555. |
| 23 |
CHEN W H, YANG J, GUO L, et al Disturbance-observer-based control and related methods—an overview. IEEE Trans. on Industrial Electronics, 2016, 63 (2): 1083- 1095.
doi: 10.1109/TIE.2015.2478397 |
| 24 | DOU L Q, SU P H, ZONG Q, et al Fuzzy disturbance observer-based dynamic surface control for air-breathing hypersonic vehicle with variable geometry inlets. IET Control Theory & Applications, 2018, 12 (1): 10- 19. |
| 25 | WANG W W, GAO Z Q A comparison study of advanced state observer design techniques. Proc. of the IEEE American Control Conference, 2003, 4754- 4759. |
| 26 | SUN H F, YANG Z L, ZENG J P New tracking-control strategy for air-breathing hypersonic vehicles. Journal of Guidance, Control, and Dynamics, 2013, 36 (3): 846- 859. |
| 27 | CHEN W H Nonlinear disturbance observer-enhanced dynamic inversion control of missiles. Journal of Guidance, Control, and Dynamics, 2003, 26 (1): 161- 166. |
| 28 |
CHEN M, JIANG C S, WU Q X Disturbance-observer-based robust flight control for hypersonic vehicles using neural networks. Advanced Science Letters, 2011, 4 (4): 1771- 1775.
doi: 10.1166/asl.2011.1491 |
| 29 | KIM S H, TAHK M J Missile acceleration controller design using proportional-integral and nonlinear dynamic control design method. Proceedings of the Institution of Mechanical Engineers Part G: Journal of Aerospace Engineering, 2012, 226 (G8): 882- 897. |
| 30 | CHO S J Robust missile autopilot design using dynamic inversion and PI control. Journal of the Korea Institute of Military Science & Technology, 2007, 10 (2): 53- 60. |
| 31 |
WIESEL W E Model feedback control on chaotic trajectories. Physical Review E, 1994, 49 (3): 1990- 1996.
doi: 10.1103/PhysRevE.49.1990 |
| 32 | BHARADWAJ S, WU M, MEASE K Identifying time-scale structure for simplified guidance law development. Proc. of the AIAA Guidance, Navigation, and Control Conference, 1997, 1369- 1375. |
| 33 |
XIA Y Q, ZHU Z, FU M Y Back-stepping sliding mode control for missile systems based on extended state observer. IET Control Theory and Applications, 2011, 5 (1): 93- 102.
doi: 10.1049/iet-cta.2009.0341 |
| 34 | KIM W, CHUNG C C Robust high order augmented observer based control for nonlinear systems. Proc. of the IEEE 51th Conference on Decision Control, 2012, 919- 924. |
| 35 | ZHANG L, ZHANG Y Y, SHANG Z Q, et al A generation and distribution system of clock signal source for signal acquisition system. Engineering Reports, 2021, 4 (6): e12494. |
| [1] | Xinjian MA, Shiqian LIU, Huihui CHENG. Civil aircraft fault tolerant attitude tracking based on extended state observers and nonlinear dynamic inversion [J]. Journal of Systems Engineering and Electronics, 2022, 33(1): 180-187. |
| [2] | Yiru ZOU, Chunsheng LIU, Ke LU. Extended state observer based smooth switching control for tilt-rotor aircraft [J]. Journal of Systems Engineering and Electronics, 2020, 31(4): 815-825. |
| [3] | Junjie LIU, Mingwei SUN, Zengqiang CHEN, Qinglin SUN. High AOA decoupling control for aircraft based on ADRC [J]. Journal of Systems Engineering and Electronics, 2020, 31(2): 393-402. |
| [4] | Ligang GONG, Qing WANG, Chaoyang DONG. Switching disturbance rejection attitude control of near space vehicles with variable structure [J]. Journal of Systems Engineering and Electronics, 2019, 30(1): 167-179. |
| [5] | Jiayi TIAN, Shifeng ZHANG. Active disturbance rejected predictive functional control for space vehicles with RCS [J]. Journal of Systems Engineering and Electronics, 2018, 29(5): 1022-1035. |
| [6] | Yuhang YUN, Shengjing TANG, Jie GUO, Wei SHANG. Robust controller design for compound control missile with fixed bounded convergence time [J]. Journal of Systems Engineering and Electronics, 2018, 29(1): 116-133. |
| [7] | Wei Shang, Shengjing Tang, Jie Guo, Yueyue Ma, and Yuhang Yun. Robust sliding mode control with ESO for dual-control missile [J]. Journal of Systems Engineering and Electronics, 2016, 27(5): 1073-1082. |
| [8] | Yueyue Ma, Jie Guo, and Shengjing Tang. BTT autopilot design for agile missiles with aerodynamic uncertainty [J]. Journal of Systems Engineering and Electronics, 2015, 26(4): 802-. |
| [9] | Zhang Ren, Wei Wang, and Zhen Shen. New robust fault-tolerant controller for self-repairing flight control systems [J]. Journal of Systems Engineering and Electronics, 2011, 22(1): 77-82. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||