
Journal of Systems Engineering and Electronics ›› 2021, Vol. 32 ›› Issue (1): 197-208.doi: 10.23919/JSEE.2021.000017
• CONTROL THEORY AND APPLICATION • Previous Articles Next Articles
Bingqiang LI1( ), Tianyi LAN2,*(), Yiyun ZHAO1(), Shuaishuai LYU3()
), Tianyi LAN2,*(), Yiyun ZHAO1(), Shuaishuai LYU3()
Received:2020-05-27
Online:2021-02-25
Published:2021-02-25
Contact:
Tianyi LAN
E-mail:libingqiang@nwpu.edu.cn;iamlty1111@163.com;zhaoyiyun@mail.nwpu.edu.cn;lvshuai@hdu.edu.cn
About author:Supported by:Bingqiang LI, Tianyi LAN, Yiyun ZHAO, Shuaishuai LYU. Open-loop and closed-loop
Add to citation manager EndNote|Reference Manager|ProCite|BibTeX|RefWorks

Fig 1
Communication topology among agents"
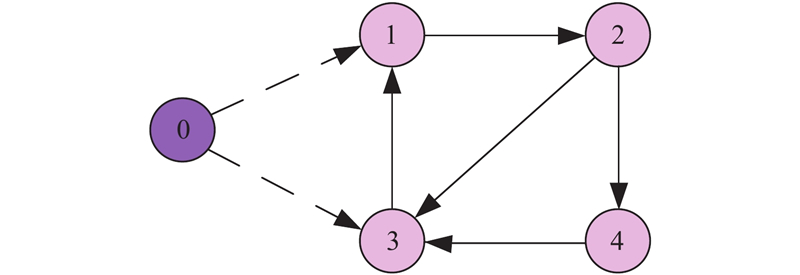
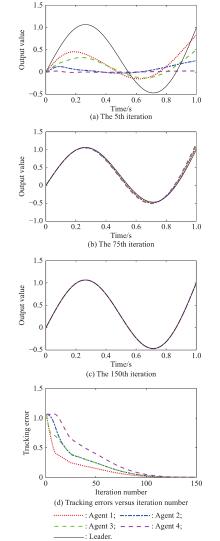
Fig 2
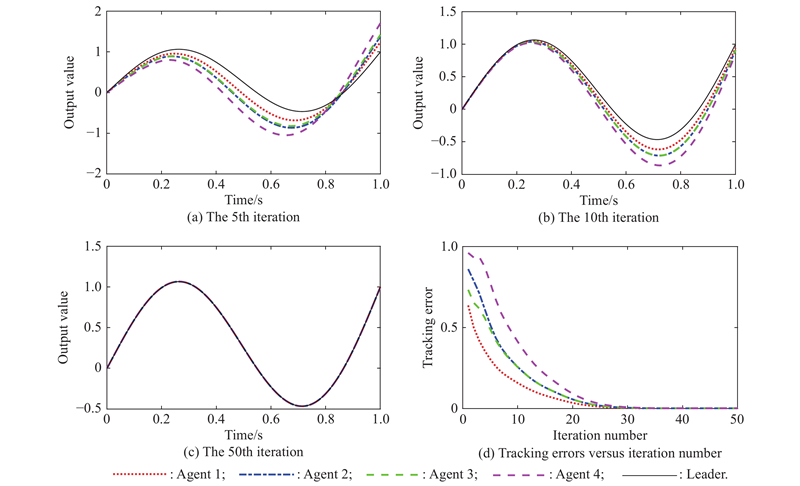
Tracking performances employing open-loop ${{{D}}^\alpha }$ -type scheme (h=0.05 s) "
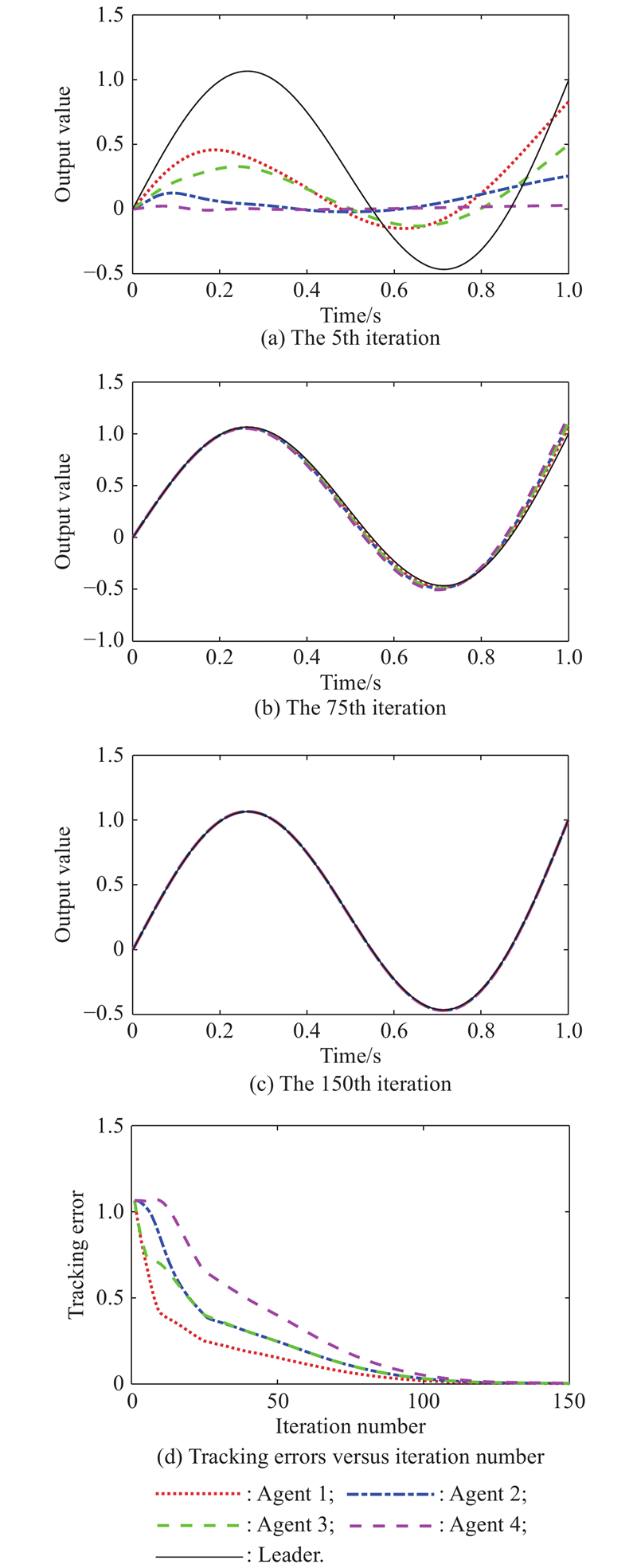
Fig 4
Tracking performances employing open-loop ${{{D}}^\alpha }$ -type scheme (h=0.2 s) "
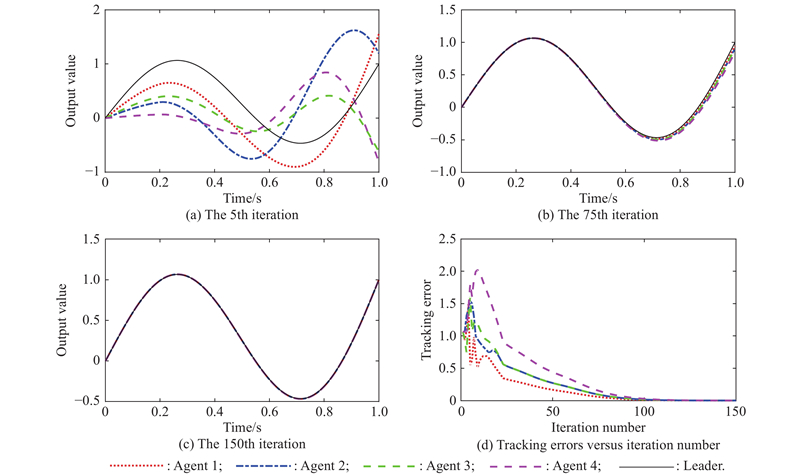
Fig 3
Tracking performances employing open-loop ${{{D}}^\alpha }$ -type scheme (h=0.1 s) "
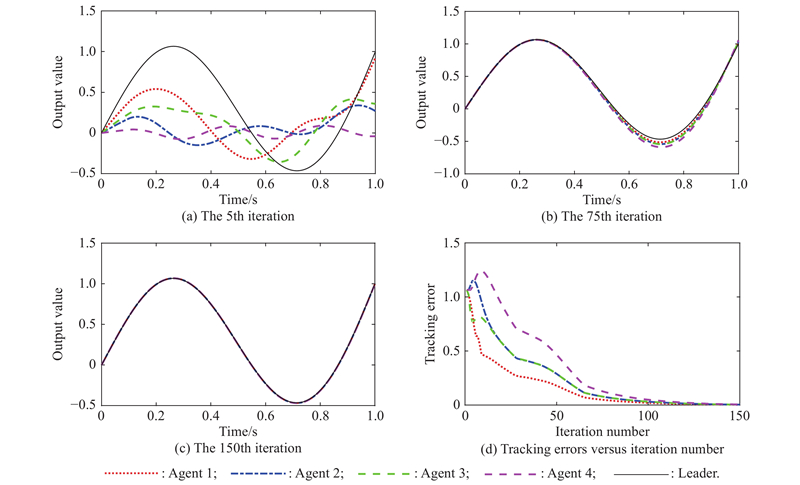
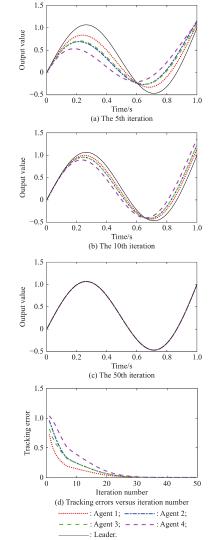
Fig 5
Tracking performances employing closed-loop ${{{D}}^\alpha }$ -type scheme (h=0.05 s) "
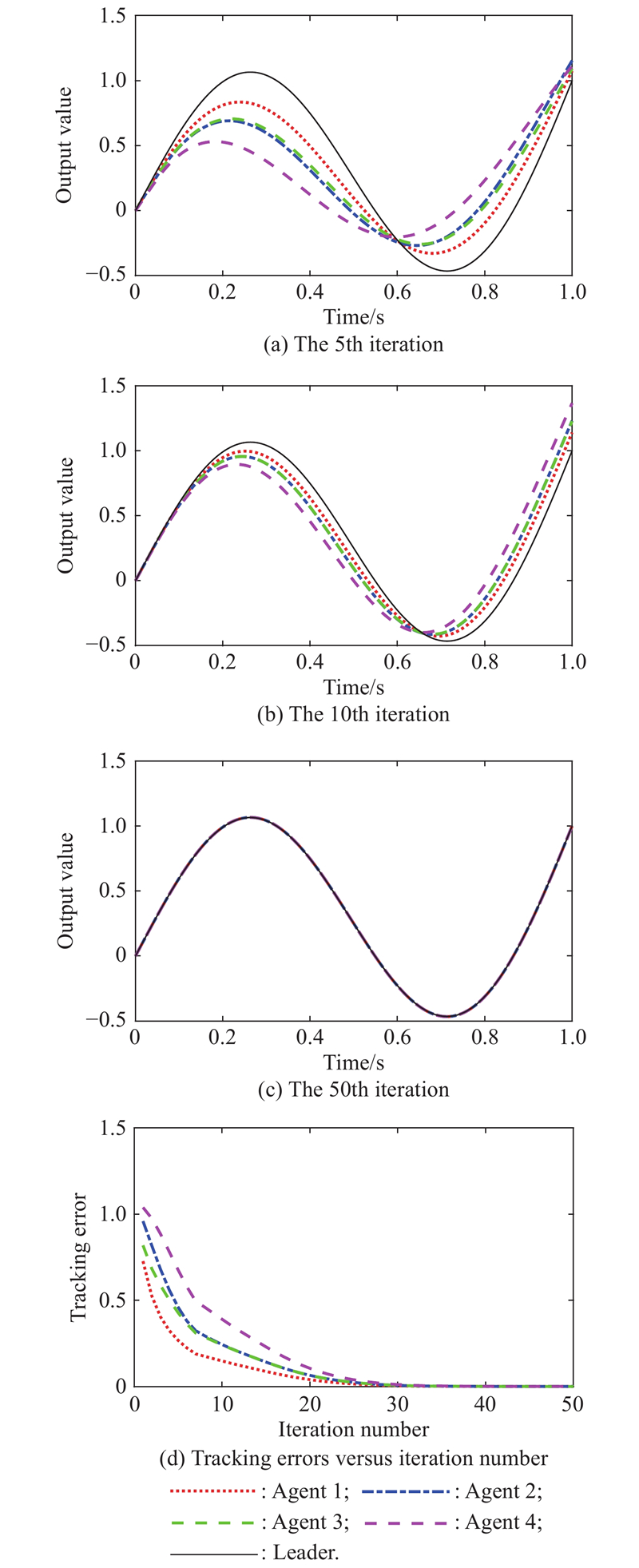
Fig 6
Tracking performances employing closed-loop ${{{D}}^\alpha }$ -type scheme (h=0.1 s) "
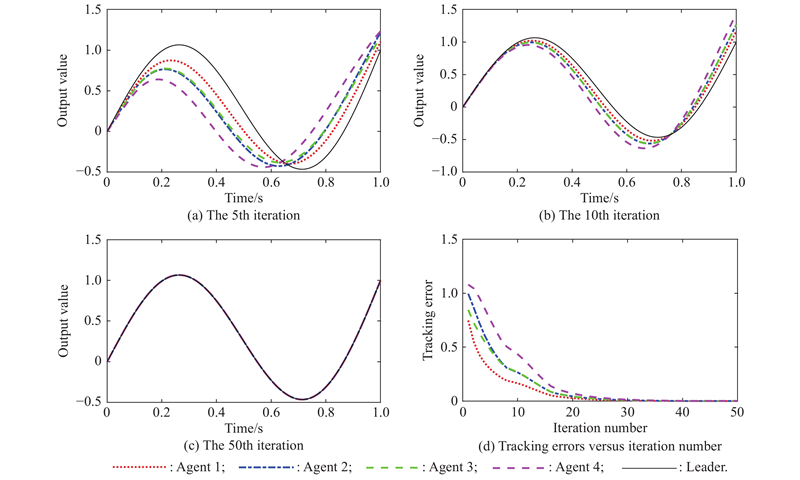

Fig 7
Tracking performances employing closed-loop ${{{D}}^\alpha }$ -type scheme (h=0.2 s) "
| 1 |
CAO Y C, YU W, REN W, et al An overview of recent progress in the study of distributed multi-agent coordination. IEEE Trans. on Industrial Informatics, 2013, 9 (1): 427- 438.
doi: 10.1109/TII.2012.2219061 |
| 2 |
NIGAM N, BIENIAWSKI S, KROO I Control of multiple UAVs for persistent surveillance: algorithm and flight test results. IEEE Trans. on Control Systems Technology, 2012, 20 (5): 1236- 1251.
doi: 10.1109/TCST.2011.2167331 |
| 3 |
DONG X W, HUA Y Z, ZHOU Y, et al Theory and experiment on formation-containment control of multiple multirotor unmanned aerial vehicle systems. IEEE Trans. on Automation Science and Engineering, 2019, 16 (1): 229- 240.
doi: 10.1109/TASE.2018.2792327 |
| 4 |
SUH J, YOU S, CHOI S, et al Vision-based coordinated localization for mobile sensor networks. IEEE Trans. on Automation Science and Engineering, 2016, 13 (2): 611- 620.
doi: 10.1109/TASE.2014.2362933 |
| 5 |
REZAEE H, ABDOLLAHI F A decentralized cooperative control scheme with obstacle avoidance for a team of mobile robots. IEEE Trans. on Industrial Electronics, 2014, 61 (1): 347- 354.
doi: 10.1109/TIE.2013.2245612 |
| 6 |
TANG Y, XING X, KARIMI H R Tracking control of networked multi-agent systems under new characterizations of impulses and its applications in robotic systems. IEEE Trans. on Industrial Electronics, 2016, 63 (2): 1299- 1307.
doi: 10.1109/TIE.2015.2453412 |
| 7 |
ZHANG H, GURFIL P Cooperative orbital control of multiple satellites via consensus. IEEE Trans. on Aerospace and Electronic Systems, 2018, 54 (5): 2171- 2188.
doi: 10.1109/TAES.2018.2808118 |
| 8 |
GAO Z H, GUO Q, NA Z Y Novel optimized routing algorithm for LEO satellite IP networks. Journal of Systems Engineering and Electronics, 2011, 22 (6): 917- 925.
doi: 10.3969/j.issn.1004-4132.2011.06.007 |
| 9 |
XU Y D, VISWANATHAN V, CAI W T Reducing synchronization overhead with computation replication in parallel agent-based road traffic simulation. IEEE Trans. on Parallel and Distributed Systems, 2017, 28 (11): 3286- 3297.
doi: 10.1109/TPDS.2017.2714165 |
| 10 | WANG C, ZHANG J, XU L H, et al A new solution for freeway congestion: cooperative speed limit control using distributed reinforcement learning. IEEE Access, 2019, 7 (3): 41947- 41957. |
| 11 | REN C, SHI Z P, DU T Distributed observer-based leader-following consensus control for second-order stochastic multi-agent systems. IEEE Access, 2018, 6 (4): 20077- 20084. |
| 12 | ARIMOTO S, KAWAMURA S, MIYAZAKI F Bettering operation of robots by learning. Journal of Field Robotics, 1984, 1 (2): 123- 140. |
| 13 |
AHN H S, CHEN Y, MOORE K L Iterative learning control: brief survey and categorization. IEEE Trans. on Systems, Man, and Cybernetics, Part C: Applications and Reviews, 2007, 37 (6): 1099- 1121.
doi: 10.1109/TSMCC.2007.905759 |
| 14 |
XU J X A survey on iterative learning control for nonlinear systems. International Journal of Control, 2011, 84 (7): 1275- 1294.
doi: 10.1080/00207179.2011.574236 |
| 15 | AHN H S, CHEN Y Q. Iterative learning control for multi-agent formation. Proc. of the ICCAS-SICE International Joint Conference, 2009: 3111−3116. |
| 16 | MENG D Y, JIA Y M Iterative learning approaches to design finite-time consensus protocols for multi-agent systems. Systems & Control Letters, 2012, 61 (1): 187- 194. |
| 17 | MENG D Y, JIA Y M, DU J, et al Tracking control over a finite interval for multi-agent systems with a time-varying reference trajectory. Systems & Control Letters, 2012, 61 (7): 807- 818. |
| 18 | MENG D Y, JIA Y M, DU J, et al On iterative learning algorithms for the formation control of nonlinear multi-agent systems. Automatica, 2013, 50 (1): 291- 295. |
| 19 | LI J S, LI J M Adaptive iterative learning control for consensus of multi-agent systems. IET Control Theory & Applications, 2013, 7 (1): 136- 142. |
| 20 | LI J S, LIU S Y, LI J M Adaptive iterative learning protocol design for nonlinear multi-agent systems with unknown control direction. Journal of the Franklin Institute, 2018, 335 (10): 4298- 4314. |
| 21 |
YUNKAI L, CHI R, YUANJING F Adaptive estimation-based TILC for the finite-time consensus control of nonlinear discrete-time MASs under directed graph. IET Control Theory and Applications, 2018, 12 (18): 2516- 2525.
doi: 10.1049/iet-cta.2018.5602 |
| 22 |
BU X H, YU Q X, HOU Z S, et al Model free adaptive iterative learning consensus tracking control for a class of nonlinear multiagent systems. IEEE Trans. on Systems, Man, and Cybernetics: Systems, 2019, 49 (4): 677- 686.
doi: 10.1109/TSMC.2017.2734799 |
| 23 |
DEVASIA S Iterative control for networked heterogeneous multi-agent systems with uncertainties. IEEE Trans. on Automatic Control, 2017, 62 (1): 431- 437.
doi: 10.1109/TAC.2016.2532120 |
| 24 |
JIN X Nonrepetitive leader-follower formation tracking for multiagent systems with LOS range and angle constraints using iterative learning control. IEEE Trans. on Cybernetics, 2019, 49 (5): 1748- 1758.
doi: 10.1109/TCYB.2018.2817610 |
| 25 |
CAO Y C, LI Y, REN W Distributed coordination of networked fractional-order systems. IEEE Trans. on Systems, Man, and Cybernetics, Part B: Cybernetics, 2010, 40 (2): 362- 370.
doi: 10.1109/TSMCB.2009.2024647 |
| 26 |
LIU H Y, CHENG L, TAN M, et al Exponential finite-time consensus of fractional-order multiagent systems. IEEE Trans. on Systems, Man, and Cybernetics: Systems, 2020, 50 (4): 1549- 1558.
doi: 10.1109/TSMC.2018.2816060 |
| 27 |
YU W W, LI Y, WEN G H Observer design for tracking consensus in second-order multi-agent systems: fractional order less than two. IEEE Trans. on Automatic Control, 2017, 62 (2): 894- 900.
doi: 10.1109/TAC.2016.2560145 |
| 28 |
GONG P, LAN W Y Adaptive robust tracking control for multiple unknown fractional-order nonlinear systems. IEEE Trans. on Cybernetics, 2019, 49 (4): 1365- 1376.
doi: 10.1109/TCYB.2018.2801345 |
| 29 |
YU Z Y, JIANG H J, HU C, et al Necessary and sufficient conditions for consensus of fractional-order multiagent systems via sampled-data control. IEEE Trans. on Cybernetics, 2017, 47 (8): 1892- 1901.
doi: 10.1109/TCYB.2017.2681718 |
| 30 | OU L L, YU X Y, YANG F, et al Two-degree-of-freedom optimal consensus scheme of fractional-order multi-agent systems. IET Control Theory & Applications, 2018, 12 (16): 2175- 2183. |
| 31 |
SHAHVALI M, NAGHIBI-SISTANI M, MODARES H Distributed consensus control for a network of incommensurate fractional-order systems. IEEE Control Systems Letters, 2019, 3 (2): 481- 486.
doi: 10.1109/LCSYS.2019.2903227 |
| 32 | PAN H, YU X H, GUO L Admissible leader-following consensus of fractional-order singular multi-agent system via observer-based protocol. IEEE Trans. on Circuits and Systems II: Express Briefs, 2018, 66 (8): 1406- 1410. |
| 33 | BAI J, WEN G G, RAHMANI A Consensus for the fractional-order double-integrator multi-agent systems based on the sliding mode estimator. IET Control Theory & Applications, 2018, 12 (5): 621- 628. |
| 34 | GONG P Distributed consensus of non-linear fractional-order multi-agent systems with directed topologies. IET Control Theory & Applications, 2016, 10 (18): 2515- 2525. |
| 35 | LIU K, SELIVANOV A, FRIDMAN E Survey on time-delay approach to networked control. Annual Reviews in Control, 2019, 13 (19): 343- 352. |
| 36 |
FRIDMAN E, SHAKED U A descriptor system approach to H∞ control of linear time-delay systems. IEEE Trans. on Automatic Control, 2002, 47 (2): 253- 270.
doi: 10.1109/9.983353 |
| 37 |
SUPLIN V, FRIDMAN E, SHAKED U H∞ control of linear uncertain time-delay systems—a projection approach. IEEE Trans. on Automatic Control, 2006, 51 (4): 680- 685.
doi: 10.1109/TAC.2006.872767 |
| 38 | KAI D, NEVILLE J F Analysis of fractional differential equations. Journal of Mathematical Analysis & Applications, 2002, 265 (2): 229- 248. |
| 39 | PODLUBNY I. Fractional differential equations. San Diego: Academic Press, 1999. |
| 40 | HORN J. Matrix analysis. Cambridge: Cambridge University Press, 1999. |
| [1] | Sader MALIKA, Fuyong WANG, Zhongxin LIU, Zengqiang CHEN. Distributed fuzzy fault-tolerant consensus of leader-follower multi-agent systems with mismatched uncertainties [J]. Journal of Systems Engineering and Electronics, 2021, 32(5): 1031-1040. |
| [2] | Duo QI, Junhua HU, Xiaolong LIANG, Jiaqiang ZHANG, Zhihao ZHANG. Research on consensus of multi-agent systems with and without input saturation constraints [J]. Journal of Systems Engineering and Electronics, 2021, 32(4): 947-955. |
| [3] | Xia WU, Yan LI, Yongjian SUN, Alei CHEN, Jianwen CHEN, Jianchao MA, Hao CHEN. Investigation of MAS structure and intelligent+ information processing mechanism of hypersonic target detection and recognition system [J]. Journal of Systems Engineering and Electronics, 2020, 31(6): 1105-1115. |
| [4] | Jie ZHANG, Gang WANG, Shaohua YUE, Yafei SONG, Jiayi LIU, Xiaoqiang YAO. Multi-agent system application in accordance with game theory in bi-directional coordination network model [J]. Journal of Systems Engineering and Electronics, 2020, 31(2): 279-289. |
| [5] | Tianyi LAN, Hui LIN, Bingqiang LI. Kernel-based auto-associative P-type iterative learning control strategy [J]. Journal of Systems Engineering and Electronics, 2020, 31(2): 383-392. |
| [6] | Weiwei WU, Qian MA, Yexin LIU, Yongjun KIM. A model for knowledge transfer in a multi-agent organization based on lattice kinetic model [J]. Journal of Systems Engineering and Electronics, 2020, 31(1): 156-167. |
| [7] | Kejun ZHANG, Guohua PENG. Robustness of iterative learning control for a class of fractional-order linear continuous-time switched systems in the sense of Lp norm [J]. Journal of Systems Engineering and Electronics, 2019, 30(4): 783-791. |
| [8] | Dariush TAVAKOLIFAR, Hamid KHALOOZADEH, Roya AMJADIFARD. Stabilization of switched systems with all unstable modes: application to the aircraft team problem [J]. Journal of Systems Engineering and Electronics, 2019, 30(4): 792-798. |
| [9] | Lu LIU, Liang SHAN, Yuewei DAI, Chenglin LIU, Zhidong QI. Improved quantum bacterial foraging algorithm for tuning parameters of fractional-order PID controller [J]. Journal of Systems Engineering and Electronics, 2018, 29(1): 166-175. |
| [10] | Xiaolei Li, Xiaoyuan Luo, Shaobao Li, Jianjin Li, and Xinping Guan. Consensus of second-order nonlinear multi-agent systems via sliding mode observer and controller [J]. Systems Engineering and Electronics, 2017, 28(4): 756-. |
| [11] | Yanchao Sun, Wenjia Wang, Guangfu Ma, Zhuo Li, and Chuanjiang Li. Backstepping-based distributed coordinated tracking for multiple uncertain Euler-Lagrange systems [J]. Journal of Systems Engineering and Electronics, 2016, 27(5): 1083-1095. |
| [12] | Jia Wei and Huajing Fang. Multi-agent consensus with time-varying delays and switching topologies [J]. Journal of Systems Engineering and Electronics, 2014, 25(3): 489-495. |
| [13] | Li Song, Qinghe Wu, Di Yu, and Yinqiu Wang. Distributed stereoscopic rotating formation control of networks of second-order agents [J]. Journal of Systems Engineering and Electronics, 2013, 24(3): 480-. |
| [14] | Bingqiang Li, Hui Lin, and Hualing Xing. Adaptive adjustment of iterative learning control gain matrix in harsh noise environment [J]. Journal of Systems Engineering and Electronics, 2013, 24(1): 128-134. |
| [15] | Xu Zhu, Jianguo Yan, and Yaohong Qu. Distributed consensus algorithm for networked Euler-Lagrange systems with self-delays and uncertainties [J]. Journal of Systems Engineering and Electronics, 2012, 23(6): 898-905. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||