
Journal of Systems Engineering and Electronics ›› 2021, Vol. 32 ›› Issue (4): 947-955.doi: 10.23919/JSEE.2021.000081
• CONTROL THEORY AND APPLICATION • Previous Articles Next Articles
Duo QI1,2( ), Junhua HU3,*(), Xiaolong LIANG1,2(), Jiaqiang ZHANG1,2(), Zhihao ZHANG1,2()
), Junhua HU3,*(), Xiaolong LIANG1,2(), Jiaqiang ZHANG1,2(), Zhihao ZHANG1,2()
Received:2020-07-06
Online:2021-08-18
Published:2021-09-30
Contact:
Junhua HU
E-mail:qi33song@sina.com;56811366@ qq.com;afeu_lxl@sina.com;jiaqiang-z@163.com;408691252@qq.com
About author:Supported by:Duo QI, Junhua HU, Xiaolong LIANG, Jiaqiang ZHANG, Zhihao ZHANG. Research on consensus of multi-agent systems with and without input saturation constraints[J]. Journal of Systems Engineering and Electronics, 2021, 32(4): 947-955.
Add to citation manager EndNote|Reference Manager|ProCite|BibTeX|RefWorks

Fig 1
Graph topology of G1"
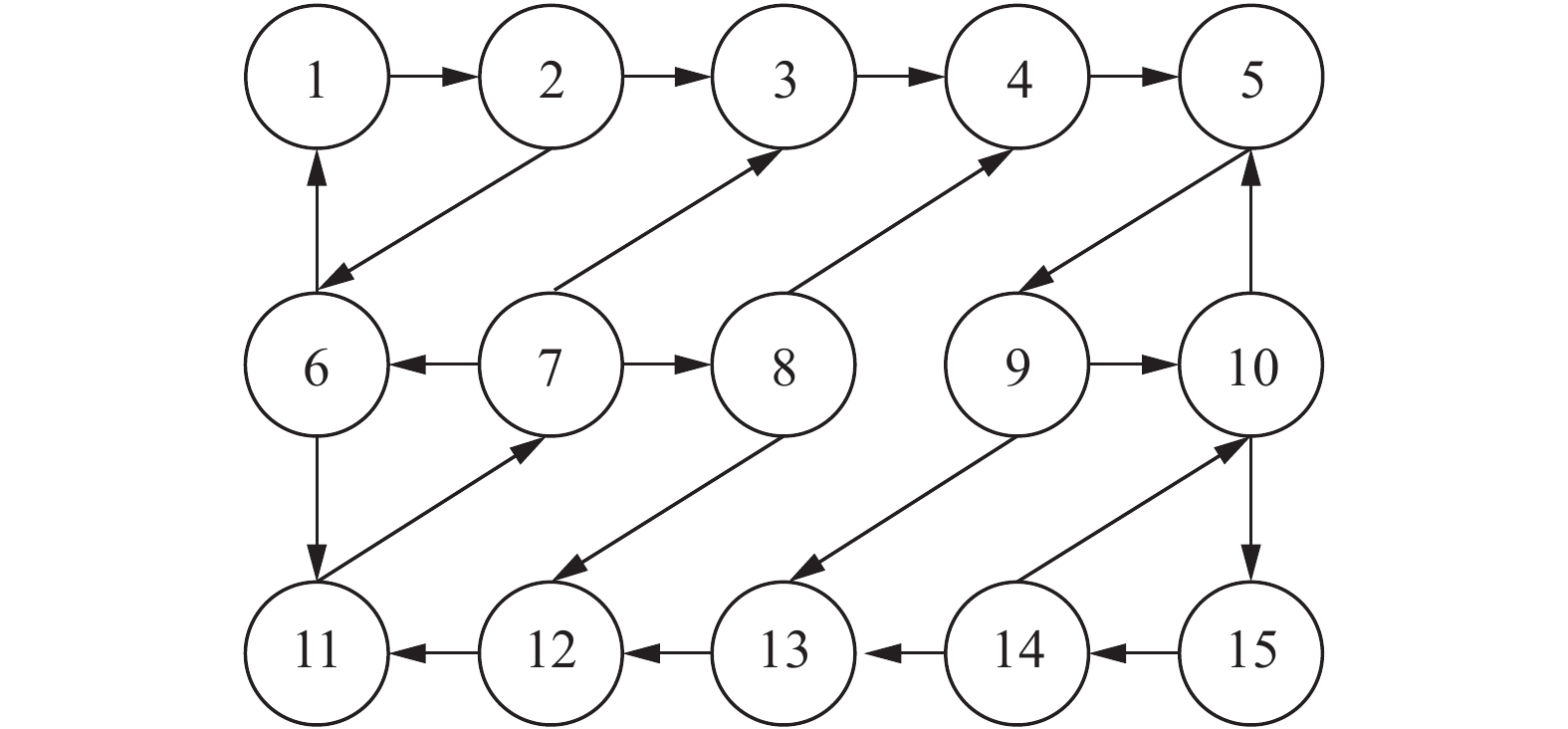

Fig 2
Evolution of positions and velocities of all agents (α=0.20, β=0.35, T=0.7 s) "
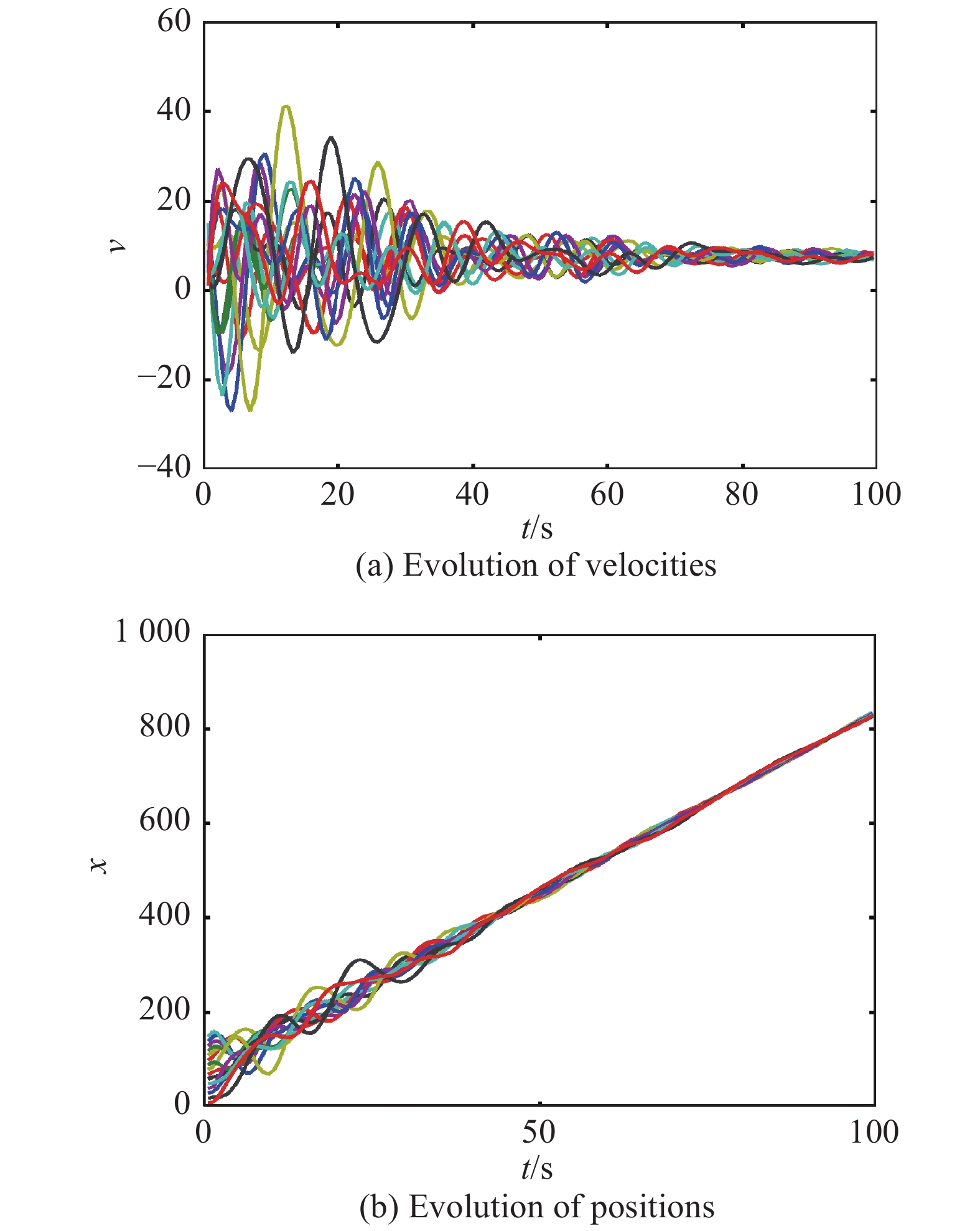
Fig 3
"
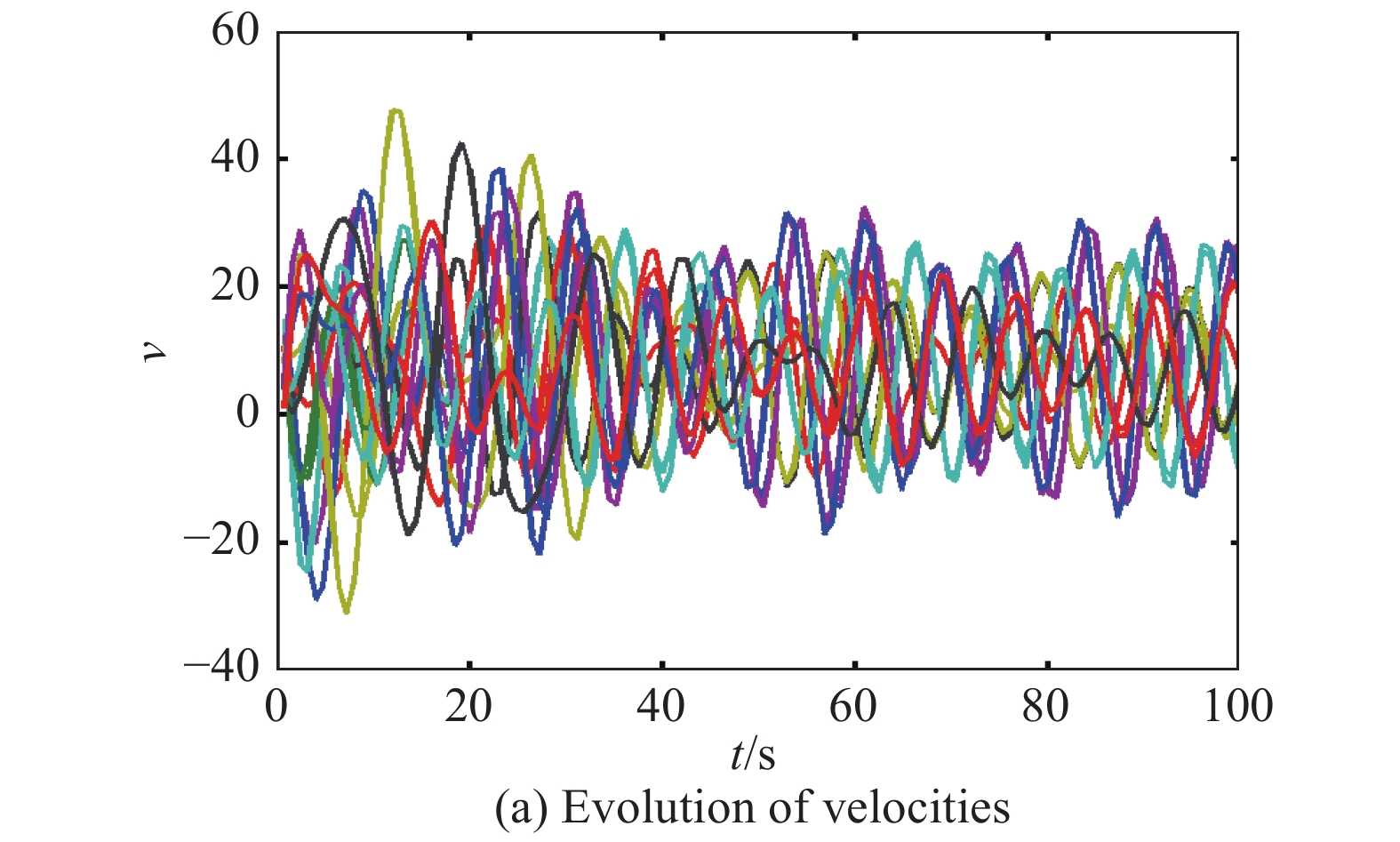
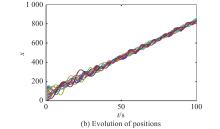
Fig 3
Evolution of positions and velocities of all agents (α=0.20, β=0.35, T=0.8 s) "
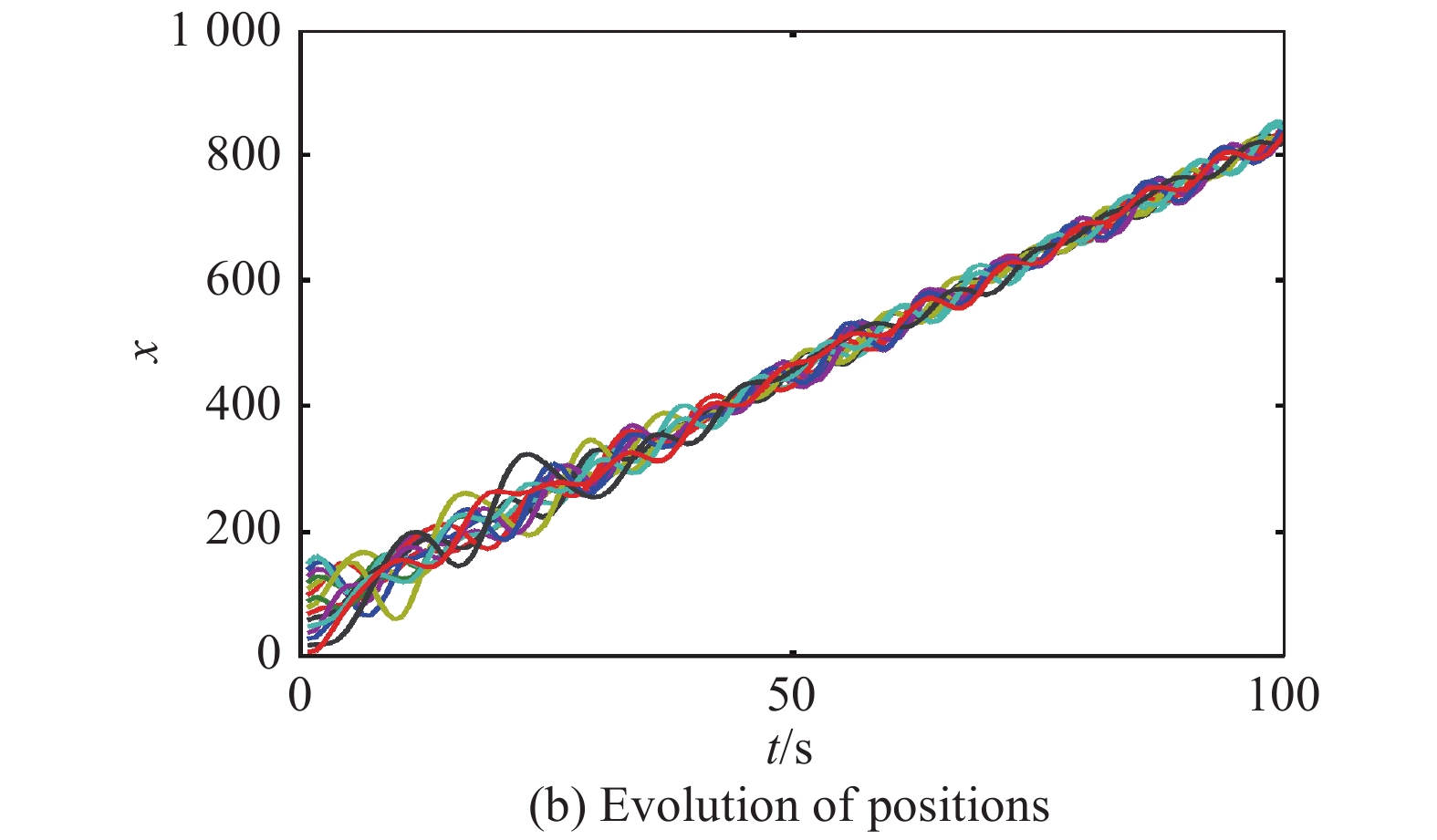

Fig 4
"
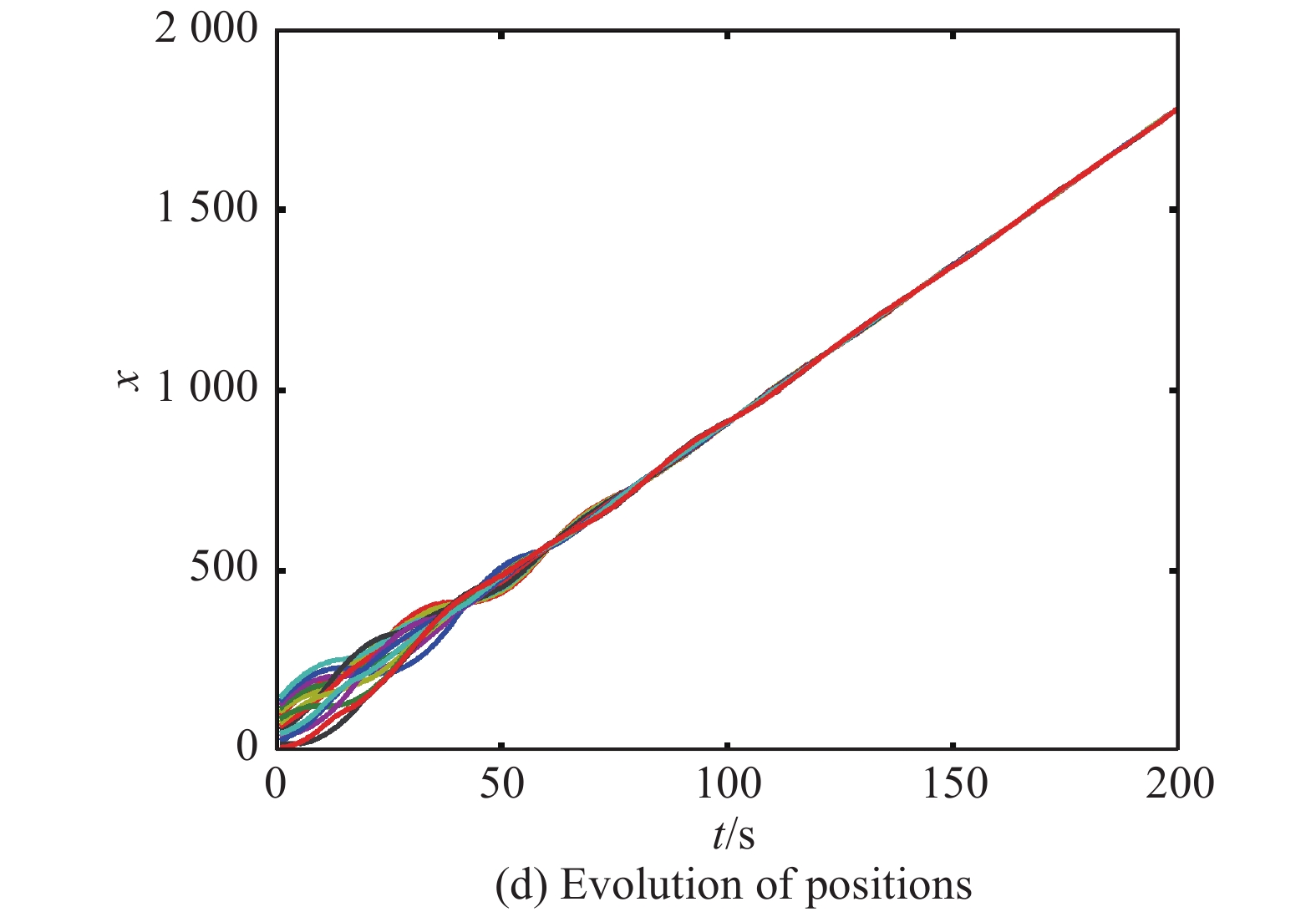
Fig 4
Evolution of positions and velocities of all agents (α=0.20, β=0.35, T=0.85 s) "
| 1 | LU A Y, YANG G H Distributed consensus control for multi-agent systems under denial-of-service. Information Sciences, 2018, 439, 95- 107. |
| 2 | HU J P. Second-order event-triggered multi-agent consensus control. Proc. of the 31st Chinese Control Conference, 2012: 6339−6344. |
| 3 | DONG Y, XU S Y, HU X M Coordinated control with multiple dynamic leaders for uncertain Lagrangian systems via self-tuning adaptive distributed observer. International Journal of Robust and Nonlinear Control, 2016, 27 (16): 2708- 2721. |
| 4 |
NI W, XIONG C, YANG J Leader-following consensus of high-order multi-agent linear systems with bounded transmission channels. International Journal of Systems Science, 2013, 44 (9): 1711- 1725.
doi: 10.1080/00207721.2012.669867 |
| 5 | BU X H, CUI L Z, HOU Z S, et al Formation control for a class of nonlinear multiagent systems using model-free adaptive iterative learning. International Journal of Robust and Nonlinear Control, 2017, 28 (4): 1402- 1412. |
| 6 |
ZHANG J L, ZHANG H, FENG T Distributed optimal consensus control for nonlinear multiagent system with unknown dynamic. IEEE Trans. on Neural Networks and Learning Systems, 2018, 29 (8): 3339- 3348.
doi: 10.1109/TNNLS.2017.2728622 |
| 7 |
SHEN D, ZHANG C, XU J X Distributed learning consensus control based on neural networks for heterogeneous nonlinear multiagent systems. International Journal of Robust and Nonlinear Control, 2019, 29 (13): 4328- 4347.
doi: 10.1002/rnc.4627 |
| 8 |
PENG X H, GENG Z Y Distributed observer-based leader-follower attitude consensus control for multiple rigid bodies using rotation matrices. International Journal of Robust and Nonlinear Control, 2019, 29 (14): 4755- 4774.
doi: 10.1002/rnc.4649 |
| 9 |
OLFATI-SABER R, MURRAY R M Consensus problems in networks of agents with switching topology and time-delays. IEEE Trans. on Automatic Control, 2004, 49 (9): 1520- 1533.
doi: 10.1109/TAC.2004.834113 |
| 10 |
REN W, BEARD R W Consensus seeking in multiagent systems under dynamically changing interaction topologies. IEEE Trans. on Automatic Control, 2005, 50 (5): 655- 661.
doi: 10.1109/TAC.2005.846556 |
| 11 |
MOREAU L Stability of multiagent systems with time-dependent communication links. IEEE Trans. on Automatic Control, 2005, 50 (2): 169- 182.
doi: 10.1109/TAC.2004.841888 |
| 12 |
PARK M J, KWON O M, PARK J H, et al Randomly changing leader-following consensus control for Markovian switching multi-agent systems with interval time-varying delays. Nonlinear Analysis: Hybrid Systems, 2014, 12, 117- 131.
doi: 10.1016/j.nahs.2013.11.003 |
| 13 |
YAN Z P, YANG Z W, YUE L D, et al Discrete-time coordinated control of leader-following multiple AUVs under switching topologies and communication delays. Ocean Engineering, 2019, 172, 361- 372.
doi: 10.1016/j.oceaneng.2018.12.018 |
| 14 |
DAI X S, WANG C, TIAN S P, et al Consensus control via iterative learning for distributed parameter models multi-agent systems with time-delay. Journal of the Franklin Institute, 2019, 356 (10): 5240- 5259.
doi: 10.1016/j.jfranklin.2019.05.015 |
| 15 |
ZHANG W, ZENG J, YAN Z P, et al Consensus control of multiple AUVs recovery system under switching topologies and time delays. IEEE Access, 2019, 7, 119965- 119980.
doi: 10.1109/ACCESS.2019.2935104 |
| 16 |
XIE X X, YANG Z, MU X W Observer-based consensus control of nonlinear multi-agent systems under semi-Markovian switching topologies and cyber attacks. International Journal of Robust and Nonlinear Control, 2020, 30 (14): 5510- 5528.
doi: 10.1002/rnc.5088 |
| 17 |
SHANG Y L Consensus seeking over Markovian switching networks with time-varying delays and uncertain topologies. Applied Mathematics and Computation, 2016, 273, 1234- 1245.
doi: 10.1016/j.amc.2015.08.115 |
| 18 |
ZHAN J Y, LI X Consensus of sampled-data multi-agent networking systems via model predictive control. Automatica, 2013, 49 (8): 2502- 2507.
doi: 10.1016/j.automatica.2013.04.037 |
| 19 | REN W, ATKINS E. Second-order consensus protocols in multiple vehicle systems with local interactions. Proc. of the AIAA Guidance, Navigation, and Control Conference and Exhibit, 2005: 1−13. |
| 20 |
YU W W, CHEN G, CAO M Some necessary and sufficient conditions for second-order consensus in multi-agent dynamical systems. Automatica, 2010, 46 (6): 1089- 1095.
doi: 10.1016/j.automatica.2010.03.006 |
| 21 |
ZHANG Y, TIAN Y P Consentability and protocol design of multi-agent systems with stochastic switching topology. Automatica, 2009, 45 (5): 1195- 1201.
doi: 10.1016/j.automatica.2008.11.005 |
| 22 |
XIE D M, WANG S K Consensus of second-order discrete-time multi-agent systems with fixed topology. Journal of Mathematical Analysis and Applications, 2012, 387 (1): 8- 16.
doi: 10.1016/j.jmaa.2011.08.052 |
| 23 |
WANG X L, SU H S, WANG X F, et al An overview of coordinated control for multi-agent systems subject to input saturation. Perspectives in Science, 2016, 7, 133- 139.
doi: 10.1016/j.pisc.2015.11.022 |
| 24 |
FAN M C, ZHANG H T, LIN Z Distributed semiglobal consensus with relative output feedback and input saturation under directed switching networks. IEEE Trans. on Circuits and Systems II: Express Briefs, 2015, 62 (8): 796- 800.
doi: 10.1109/TCSII.2015.2433399 |
| 25 |
SU H, CHEN M Z Q, LAM J, et al Semi-global leader-following consensus of linear multi-agent systems with input saturation via low gain feedback. IEEE Trans. on Circuits and Systems I: Regular Papers, 2013, 60 (7): 1881- 1889.
doi: 10.1109/TCSI.2012.2226490 |
| 26 |
WANG B H, CHEN W S, ZHANG B S Semi-global robust tracking consensus for multi-agent uncertain systems with input saturation via metamorphic low-gain feedback. Automatica, 2019, 103, 363- 373.
doi: 10.1016/j.automatica.2019.02.002 |
| 27 |
ZHAO Z Y, LIN Z L Global leader-following consensus of a group of general linear systems using bounded controls. Automatica, 2016, 68, 294- 304.
doi: 10.1016/j.automatica.2016.01.027 |
| 28 | MENG Z Y, ZHAO Z Y, LIN Z L On global leader-following consensus of identical linear dynamic systems subject to actuator saturation. Systems & Control Letters, 2013, 62 (2): 132- 142. |
| 29 | YANG T, MENG Z Y, DIMAROGONAS D V, et al. Global consensus in homogeneous networks of discrete-time agents subject to actuator saturation. Proc. of the European Control Conference, 2013: 244−249. |
| 30 |
CHENG Z, ZHANG H T, FAN M C, et al Distributed consensus of multi-agent systems with input constraints: a model predictive control approach. IEEE Trans. on Circuits and Systems I: Regular Papers, 2015, 62 (3): 825- 834.
doi: 10.1109/TCSI.2014.2367575 |
| 31 | ZHONG Z Z, SUN L N, WANG J C, et al Consensus for first- and second-order discrete-time multi-agent systems with delays based on model predictive control schemes. Circuits Systems & Signal Processing, 2015, 34 (1): 127- 152. |
| 32 | LI Y, WEI W, XIANG J Consensus problems for linear time-invariant multi-agent systems with saturation constraints. IET Control Theory & Applications, 2011, 5 (6): 823- 829. |
| 33 |
FENG Y Z, LU J W, XU S Y, et al Couple-group consensus for multi-agent networks of agents with discrete-time second-order dynamics. Journal of the Franklin Institute, 2013, 350 (10): 3277- 3292.
doi: 10.1016/j.jfranklin.2013.07.004 |
| 34 |
HUANG N, DUAN Z S, CHEN G R Some necessary and sufficient conditions for consensus of second-order multi-agent systems with sampled position data. Automatica, 2016, 63, 148- 155.
doi: 10.1016/j.automatica.2015.10.020 |
| 35 |
DONG X W, YU B C, SHI Z Y, et al Time-varying formation control for unmanned aerial vehicles: theories and applications. IEEE Trans. on Control Systems Technology, 2015, 23 (1): 340- 348.
doi: 10.1109/TCST.2014.2314460 |
| 36 |
DONG X W, ZHOU Y, REN Z, et al Time-varying formation tracking for second-order multi-agent systems subjected to switching topologies with application to quadrotor formation flying. IEEE Trans. on Industrial Electronics, 2017, 64 (6): 5014- 5024.
doi: 10.1109/TIE.2016.2593656 |
| [1] | Sader MALIKA, Fuyong WANG, Zhongxin LIU, Zengqiang CHEN. Distributed fuzzy fault-tolerant consensus of leader-follower multi-agent systems with mismatched uncertainties [J]. Journal of Systems Engineering and Electronics, 2021, 32(5): 1031-1040. |
| [2] |
Bingqiang LI, Tianyi LAN, Yiyun ZHAO, Shuaishuai LYU.
Open-loop and closed-loop |
| [3] | Xia WU, Yan LI, Yongjian SUN, Alei CHEN, Jianwen CHEN, Jianchao MA, Hao CHEN. Investigation of MAS structure and intelligent+ information processing mechanism of hypersonic target detection and recognition system [J]. Journal of Systems Engineering and Electronics, 2020, 31(6): 1105-1115. |
| [4] | Siyu HUA, Xugang WANG, Yin ZHU. Sliding-mode control for a rolling-missile with input constraints [J]. Journal of Systems Engineering and Electronics, 2020, 31(5): 1041-1050. |
| [5] | Jie ZHANG, Gang WANG, Shaohua YUE, Yafei SONG, Jiayi LIU, Xiaoqiang YAO. Multi-agent system application in accordance with game theory in bi-directional coordination network model [J]. Journal of Systems Engineering and Electronics, 2020, 31(2): 279-289. |
| [6] | Weiwei WU, Qian MA, Yexin LIU, Yongjun KIM. A model for knowledge transfer in a multi-agent organization based on lattice kinetic model [J]. Journal of Systems Engineering and Electronics, 2020, 31(1): 156-167. |
| [7] | Dariush TAVAKOLIFAR, Hamid KHALOOZADEH, Roya AMJADIFARD. Stabilization of switched systems with all unstable modes: application to the aircraft team problem [J]. Journal of Systems Engineering and Electronics, 2019, 30(4): 792-798. |
| [8] | Xiaolei Li, Xiaoyuan Luo, Shaobao Li, Jianjin Li, and Xinping Guan. Consensus of second-order nonlinear multi-agent systems via sliding mode observer and controller [J]. Systems Engineering and Electronics, 2017, 28(4): 756-. |
| [9] | Hui Sun, Jianguo Yan, Yaohong Qu, and Jie Ren. Sensor fault-tolerant observer applied in UAV anti-skid braking control under control input constraint [J]. Systems Engineering and Electronics, 2017, 28(1): 126-. |
| [10] | Yanchao Sun, Wenjia Wang, Guangfu Ma, Zhuo Li, and Chuanjiang Li. Backstepping-based distributed coordinated tracking for multiple uncertain Euler-Lagrange systems [J]. Journal of Systems Engineering and Electronics, 2016, 27(5): 1083-1095. |
| [11] | Litong Ren, Shousheng Xie, Yu Zhang, Jingbo Peng, and Ledi Zhang. Chattering analysis for discrete sliding mode control of distributed control systems [J]. Journal of Systems Engineering and Electronics, 2016, 27(5): 1096-1107. |
| [12] | Wenhui Liu, Feiqi Deng, Jiarong Liang, and Xuekui Yan. Weighted average consensus problem in networks of agents with diverse time-delays [J]. Journal of Systems Engineering and Electronics, 2014, 25(6): 1056-1064. |
| [13] | Qingkai Yang, Hao Fang, Yutian Mao and Jie Huang. Distributed tracking for networked Euler-Lagrange systems without velocity measurements [J]. Journal of Systems Engineering and Electronics, 2014, 25(4): 671-. |
| [14] | Jia Wei and Huajing Fang. Multi-agent consensus with time-varying delays and switching topologies [J]. Journal of Systems Engineering and Electronics, 2014, 25(3): 489-495. |
| [15] | Li Song, Qinghe Wu, Di Yu, and Yinqiu Wang. Distributed stereoscopic rotating formation control of networks of second-order agents [J]. Journal of Systems Engineering and Electronics, 2013, 24(3): 480-. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||